1. Introduction
Due to the shortage of land resources, the exploitation of the marine field has been paid more attention to recently. As an essential part of many underwater tasks, underwater object detection technology plays an important role in various fields, including marine resource exploitation, marine biological fishing and breeding, and underwater human–robot interaction [
1,
2]. A lightweight and accurate underwater object detection algorithm is also of great significance to the intelligence of unmanned underwater vehicles (UUVs). It is the key for UUVs to explore the ocean autonomously. Object detection networks (ODNs) have made rapid development with the application of deep learning (DL) technology to the computer vision field in recent years. However, underwater object detection has been a challenging task. First, the underwater environment is more complex than the terrestrial environment. Compared with blue and green lights with a shorter wavelength, red light has a longer wavelength and decays faster in the water, which causes the color of underwater images to tend to be blue-green. Due to the scattering of incident light by suspended particles and microorganisms in water, as well as the interference of artificial light sources, the contrast in underwater images is low, and targets in the images are not clear. All mentioned greatly affect the detection accuracy of underwater object detection models. Second, in practical industrial applications, underwater object detection networks often need to be deployed on UUVs with limited power for their intelligence and flexibility in the exploration of the ocean environment [
3]. This means that most ODNs based on DL with a large number of parameters and high computational complexity are not applicable to these applications. Therefore, how to design a high-precision lightweight ODN that can be deployed on low-power processors has been one of the main problems in underwater object detection. Finally, there have been no large universal underwater datasets to support the research of underwater object detection, such as COCO [
4] and PASCAL VOC [
5] datasets.
Most of the existing methods use image enhancement technology to correct the color of underwater images and enhance the clarity of these images before underwater object detection [
6,
7,
8,
9,
10]. Unfortunately, some of the image enhancement algorithms cannot be applied to underwater object detection tasks based on UUVs. Image enhancement algorithms aim to generate underwater images suitable for viewing with human eyes, and the evaluation criteria typically include the peak signal-to-noise ratio (PSNR) and structural similarity (SSIM). However, the common metric in underwater object detection is average precision (AP), indicating a gap between the two tasks. In addition, the application of image enhancement algorithms can increase the complexity of the entire underwater object detection task, which is also not beneficial to their deployment on low-power processors. Aiming at the requirement that an underwater ODN needs to be deployed on a low-power processor of UUVs, this paper proposes a lightweight ODN based on the YOLOX model [
11] called LUO-YOLOX. The object detection network achieves an accuracy of 80.7% on the URPC2021 dataset and 80.9% on the DUO dataset [
12], having 5.31 million (5.31M) parameters and 3.81 giga floating-point operations (3.81GFLOPs). This indicates that a good trade-off between the lightweight network structure and the detection accuracy is achieved.
Different from the methods that use image enhancement algorithms before object detection, this paper proposes a self-supervised pre-training joint framework (SPJF) based on the underwater auto-encoder transformation (UAET) to solve the problems of poor image quality and scarce datasets. In the proposed framework, a simple and efficient underwater image degradation method was designed. Given random degradation parameters, an image from the land dataset PASCAL VOC2012 was randomly degraded into an underwater image using the underwater degradation pipeline. Then, the LUO-YOLOX’s backbone was used to extract features from the image and the corresponding degraded image. Further, the UAET was used to decode the features to predict random degradation parameters. With the help of the UAET, the backbone of the proposed ODN can learn the intrinsic characteristics of targets from degraded underwater images. It should be noted that the UAET module can be applied to different ODNs. In this paper, this module was used to assist the proposed lightweight LUO-YOLOX. Many experiments have been conducted to prove that the proposed object detection network can achieve a good trade-off between the lightweight design and the detection accuracy and to demonstrate the high effectiveness of the proposed joint framework for self-supervised pre-training.
In summary, the main contributions to this study are as follows:
- (1)
A lightweight ODN based on the YOLOX model called LUO-YOLOX is proposed. The LUO-YOLOX network meets the requirement of lightweight design and can be deployed on an underwater robot, maintaining a high detection accuracy;
- (2)
An improved SPJF is introduced in order to handle several issues, i.e., underwater image color distortion, inconspicuous target features, and scarce underwater datasets. This framework uses the UAET module to guide the backbone of ODNs to learn more essential and robust features of a target from underwater degradation images using self-supervised learning. The UAET module is not contained in the forward inference process of the ODN, unlike in the image enhancement algorithms, so the parameter number and computation complexity of the entire ODN are not high.
The rest of this article is organized as follows.
Section 2 reviews the related work in the underwater object detection field.
Section 3 introduces the proposed lightweight ODN and SPJF.
Section 4 presents and analyzes the experimental results. Finally,
Section 5 draws the main conclusions and presents future work.
2. Related Work
This section briefly reviews the current research on ODN based on DL and introduces some of the related studies on underwater object detection.
2.1. Object Detection Based on DL
As a basic task in computer vision, object detection has a wide range of industrial applications. With the help of DL, object detection has been developed rapidly in recent years. Due to the powerful feature extraction capability of convolutional neural networks (CNNs), the object detection algorithms have been greatly improved—by employing CNNs—in terms of both detection speed and detection accuracy compared to the traditional object detection methods, such as histograms of oriented gradients (HOG) [
13] and a deformable part-based model (DPM) [
14].
ODN based on DL can be roughly divided into two categories. The first category includes two-stage ODNs represented by the Fast-RCNN and Faster-RCNN [
15] series. They select the candidate region of a target first and then detect the target in the candidate region. The second category includes the one-stage ODNs represented by the YOLO series [
16,
17,
18,
19]. The one-stage networks do not require the generation of candidate regions but can directly detect the target. Each of the two types of detection networks has certain advantages. For instance, the two-stage ODNs have high detection accuracy, while the one-stage ODNs have a fast detection speed. However, with the advent of one-stage detection networks, such as RetinaNet [
20] and YOLOX [
11], in recent years, they have surpassed the two-stage networks in terms of detection accuracy in some of their application areas. Namely, the one-stage ODNs have been more favored in industrial applications than the two-stage networks.
2.2. Underwater Object Detection
In recent years, various underwater ODNs have been proposed. Different solutions have been introduced to address the difficulty of underwater object detection. For instance, to solve the problem of underwater image color distortion, Yeh et al. [
21] placed a color conversion network before the ODN to transform underwater images into gray images and then jointly trained the color conversion network and the detection network. Further, to alleviate the adverse effects of a complex underwater environment in underwater images, Zhao et al. [
22] proposed using an auxiliary backbone network to learn the source-domain data and considered the connection between the backbone of ODN and the auxiliary backbone to eliminate the interference caused by complex source-domain information. Wang et al. [
23] proposed adding an adaptive image enhancement module to the detection model before the ODN to solve the problems of unclear images and color distortion in underwater images. They used the object detection loss function to guide the added module to optimize the object detection parameters. Chen et al. [
24] jointly trained a GAN network for underwater image restoration and an ODN and used the gradient backpropagation method to train the GAN network to generate underwater images conducive to object detection tasks. Zhang et al. [
25] improved the YOLOv4 object detection model by using the MobileNetv2 [
26] and proposed a multi-scale attention feature fusion mechanism to improve the detection accuracy of small targets under the condition of a large number of small targets in the underwater environment.
Although the above-mentioned studies have solved the problems in underwater object detection to a certain extent, they increased the complexity of the detection task. Namely, they require much effort in underwater image preprocessing and use complex modules to improve the accuracy of underwater ODNs. To overcome these limitations, this paper proposes a self-supervised pre-training method that does not require adding any module to the forward inference of the ODN while improving the detection accuracy and ensuring the light weight of a detection model. The proposed method is described in detail in the following section.
3. Proposed Method
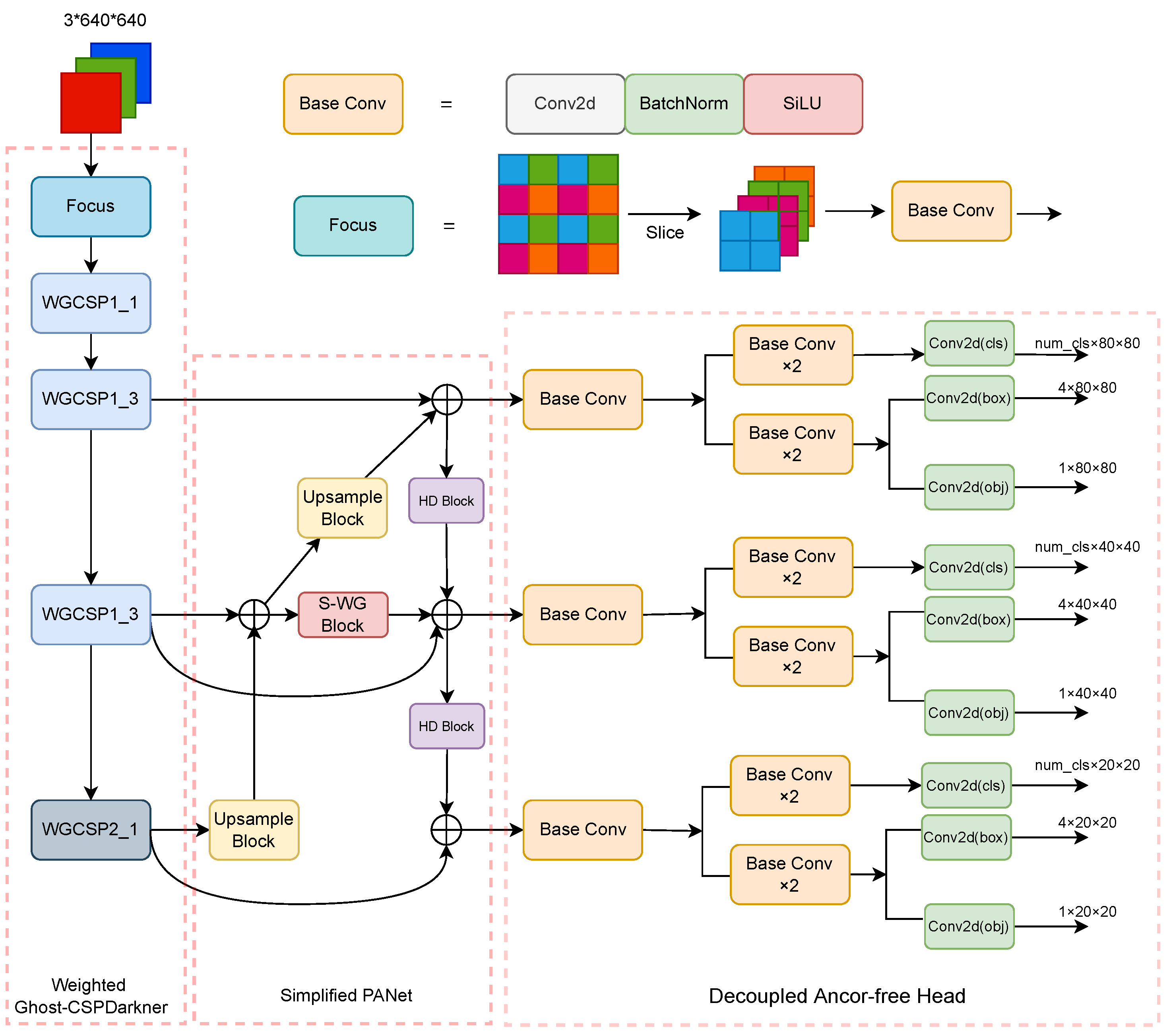
This section introduces the LUO-YOLOX model. In the proposed model, the backbone of YOLOX is lightened by using the weighted ghost-CSPDarknet to extract features from underwater images. In addition, the path aggregation network (PANet) [
27] is improved, and a simplified PANet is used as a feature synthesis part in the proposed object detection network. Finally, the decoupled anchor-free head is used to detect the target. After introducing the LUO-YOLOX model, the proposed self-supervised pre-training joint framework is described in detail. The overall architecture of the proposed method is shown in
Figure 1.
3.1. Weighted Ghost-CSPDarknet
This study designs a lightweight backbone based on the CSPDarknet model [
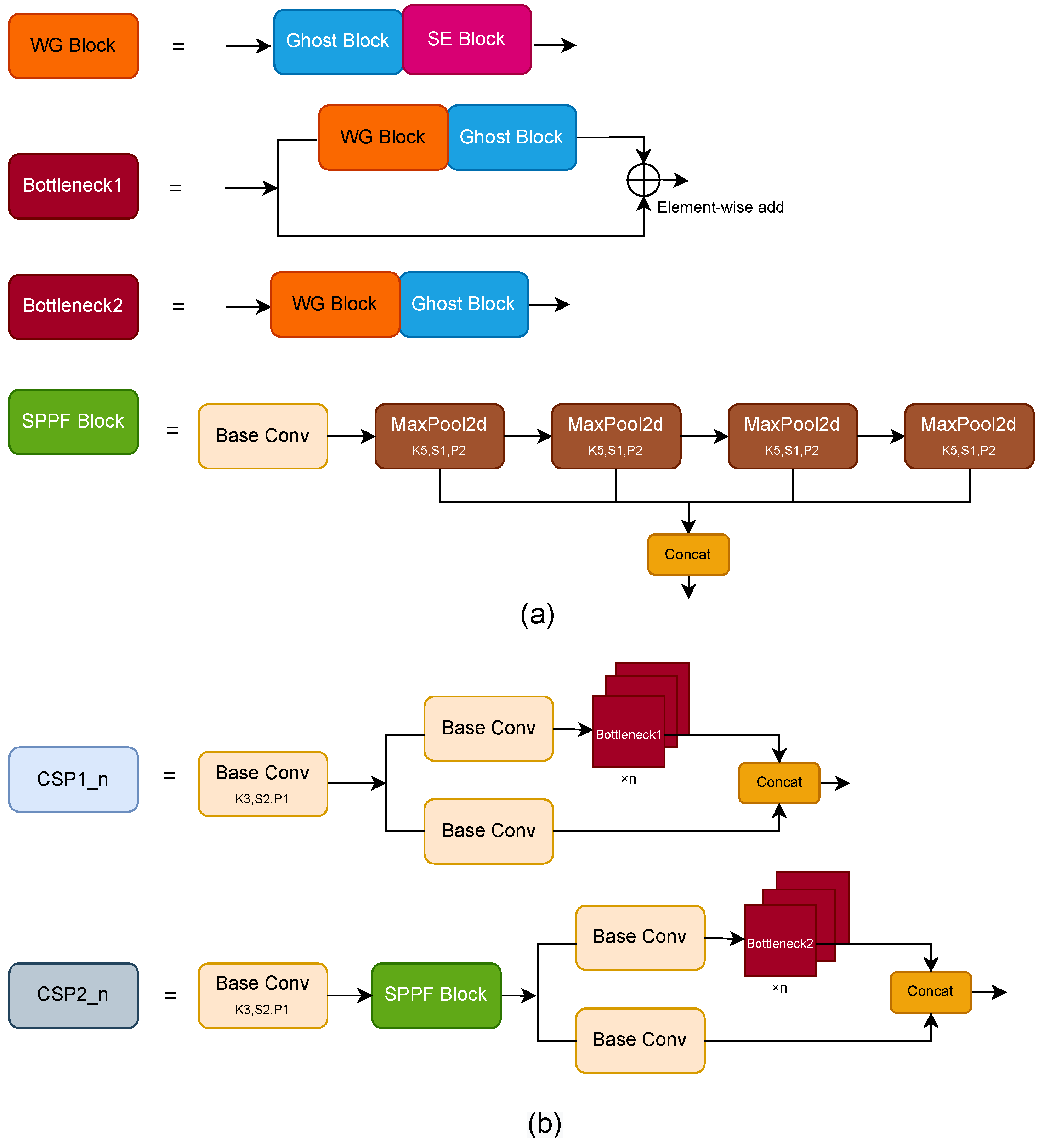
11] called weighted ghost-CSPDarknet (WG-CSP). The WG-CSP structure is presented in
Figure 2. In the figure, Base conv consists of Conv2d, BatchNorm, and SiLU, where Conv2d denotes the convolution operation, BatchNorm is the batch normalization, and SiLU represents the activation function; K3 denotes the convolution kernel size of 3 × 3; S2 indicates that the stride of convolution is two; P1 shows that the padding of convolution is one. The default values of K, S, and P are one, one, and zero, respectively. Further, Maxpool2d denotes the max-pooling downsampling operation; concat shows that the feature maps are concatenated in the channel dimension; ⊕ stands for the element-wise addition; num_cls in the head denotes the number of classes in datasets. The CSPDarknet is the backbone of the YOLOX model. It should be noted that a large number of parameters are taken over by the bottlenecks in the CSPDarknet. Therefore, more attention is paid to the lightweight design of the bottleneck.
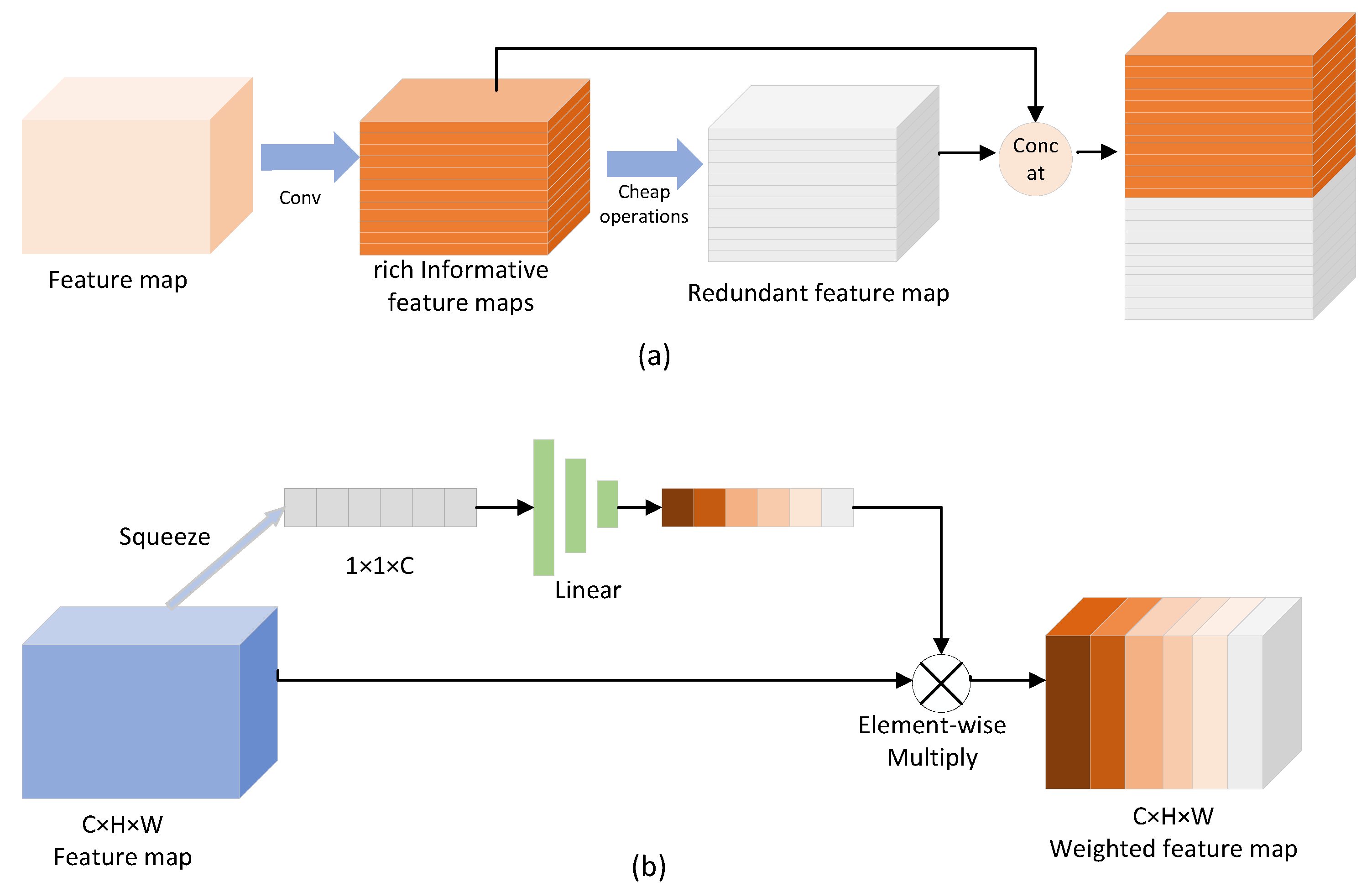
The main innovation of this work relates to the GhostNet [
28], which assumes that there is redundant information in the feature maps extracted by the common convolutional layer. Therefore, the Ghost Block, which uses convolution operations to extract rich, informative features while the redundant features are formed by cheap operations, is proposed. The Ghost Block was used to replace the common convolutional layers in bottlenecks, and depthwise separable convolutions were used as cheap operations. However, the Ghost Block simply concatenates rich, informative feature maps and redundant feature maps in the channel dimension. It is obvious that the importance of the two feature maps is different, so the squeeze-and-excitation (SE) block [
29] was added after the Ghost Block to weigh the feature maps extracted by the Ghost Block in the channel dimension. The SE block assigns larger weights to rich, informative feature maps and smaller weights to redundant feature maps. The structures of the Ghost Block and SE block are shown in
Figure 3.
By combining the Ghost Block and the SE block, a weighted ghost (WG) block was designed and used to reconstruct the bottleneck. The structures of the WG Block, the new bottleneck, and the WG-CSP block are shown in
Figure 4. Moreover, different from the YOLOX model, which uses spatial pyramid pooling (SPP) [
30] to fuse features of different scales, the proposed WG-CSP uses a spatial pyramid pooling-faster (SPPF) block. The SPPF block can achieve the same results as the SPP block while reducing the calculation cost of the ODN and increasing the detection speed of the network. After applying the WG-CSP, the number of parameters of ODN reduces from 8.94 M to 7.93 M, while the floating-point operation number reduces from 5.63 GFlOPs to 4.86 GFLOPs compared to the YOLOX model.
3.2. Simplified PANet
Currently, the majority of one-stage ODNs use a PANet as their neck to fuse features from different layers, which is beneficial for detecting targets of different scales. The PANet is designed based on the feature pyramid network (FPN) [
31], and its main function is to add the bottom-to-top feature fusion path on the basis of the top-down feature fusion path of an FPN. This significantly alleviates the deficiency of low semantic information in the top fusion layer of the FPN. However, due to its complex structure, the PANet is not suitable for lightweight ODNs. In view of this, this study proposed a simplified PANet, whose structure is shown in
Figure 2.
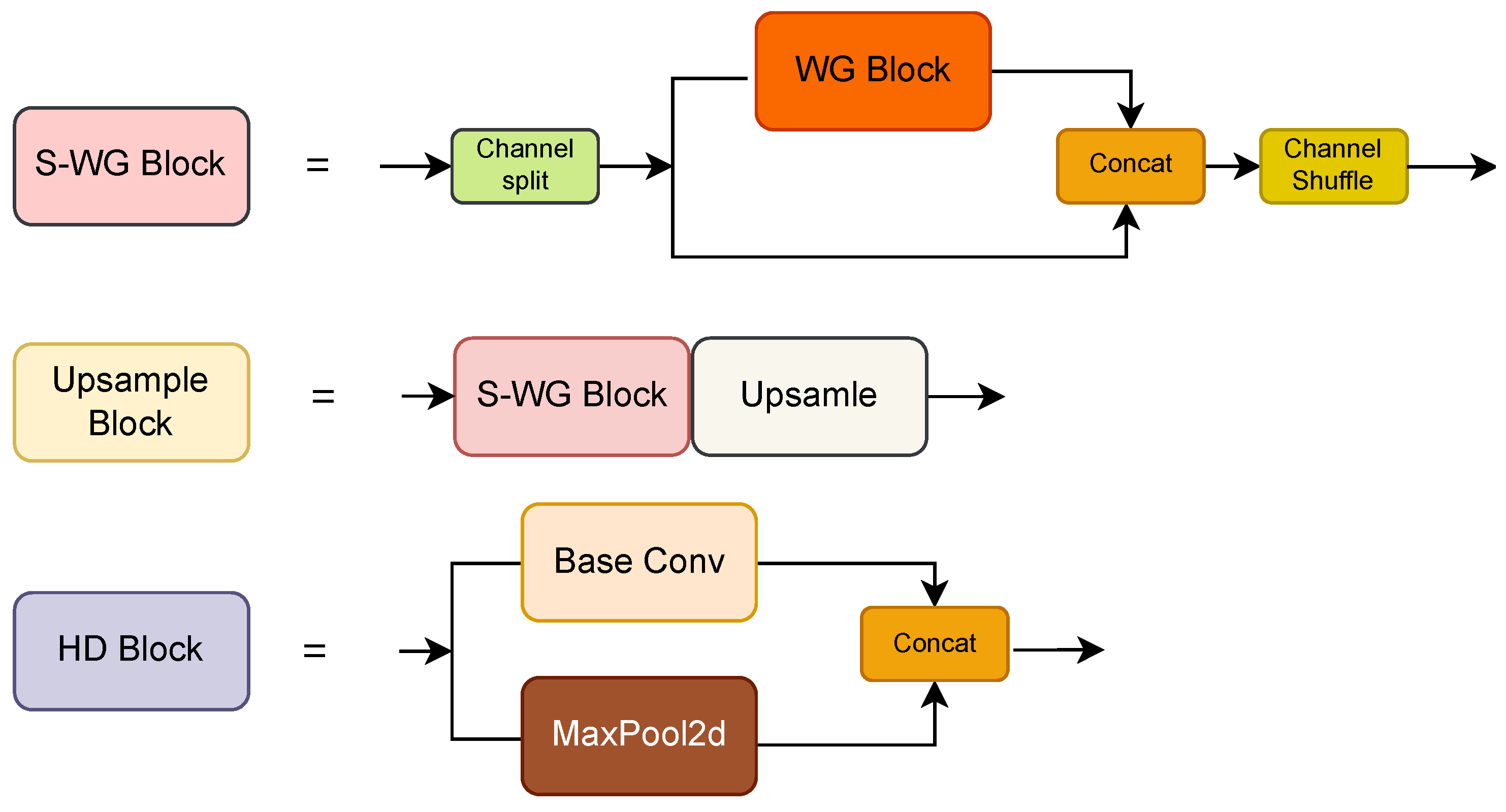
There are a large number of 1 × 1 convolution kernels in a PANet. Therefore, to make the network lightweight, this study proposes a new module called the shuffle-weighted ghost (S-WG) block to replace the 1 × 1 convolution kernels. First, the input feature maps were split in the channel dimension. Half of the input feature maps were calculated by the WG block, while the other half of the feature maps were obtained by identity mapping. Finally, the channels [
32] were combined to enhance the feature maps’ interactions in the channel dimension. With the help of the S-WG block, the number of network parameters was decreased significantly. In addition, a downsampling block called hybrid downsampling (HD) was designed based on the S-WG block. In the HD block, maximum pooling downsampling and S-WG downsampling were performed on the input feature maps in turn. Then, the two output feature maps were concatenated in the channel dimension. In addition, inspired by the bidirectional feature pyramid network (BiFPN) [
33], the cross-level links were used at the feature level to achieve better feature fusion. The structures of the S-WG, upsample, and HD blocks in the S-PANet are shown in
Figure 5.
After using the S-PANet, the parameters of our ODN were reduced from 7.93 M to 5.31 M, and the number of floating-point operations was reduced from 4.86 GFLOPs to 3.81 GFLOPs while ensuring the feature fusion ability of the proposed object detection network.
3.3. Decoupled Anchor-Free Head
The decoupled anchor-free head (DAH) was used for underwater object detection and its structure is shown in
Figure 2. Decoupled anchor-free detection heads are at the end of LUO-YOLOX. It has three branches for detecting large, medium, and small targets, respectively. Compared to the anchor-based detector, an anchor-free detector omits the complex anchor generation process. In addition, due to a large number of small targets in the underwater object detection task and difficulty in matching the anchor generated by the anchor-based detector to the ground truth for small targets, a high missing rate of small targets can be caused. The proposed anchor-free detector can solve this problem based on keypoint detection. Moreover, the decoupled technology was used, and two branches were used to perform the regression of the detection box and the classification of the target.
3.4. SPJF
The attenuation and scattering of the light medium have a great influence on the detection accuracy of an underwater ODN. To overcome this limitation, most of the existing methods aim to enhance an underwater image using image enhancement algorithms. However, in some cases, this approach does not yield satisfactory results. Unlike this approach, this study proposes an innovative SPJF to solve the mentioned problems in underwater object detection. In addition, inspired by the multi-task auto encoding transformation (MAET) [
34], this study proposes the UAET. Applying self-supervised learning, the proposed UAET handles the adverse effects of color bias and blurring in underwater images when extracting the intrinsic feature of objects.
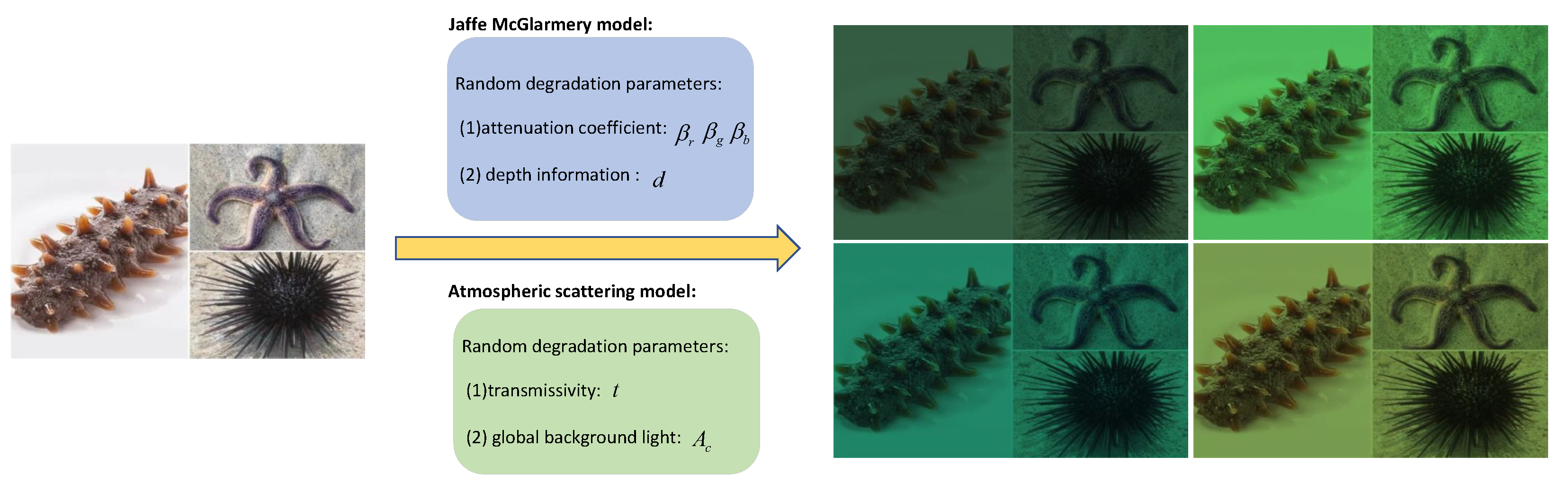
First, an underwater degradation pipeline was designed, as shown in
Figure 6. Considering the time cost of the ODN training, the pipeline was designed in a way to omit the design complexity. Further, the Jaffe–McGlamery model [
35] was used to degrade land optical images to underwater images, which can be expressed as follows:
where
represents r, g, and b channels;
is a degraded underwater image in a channel
;
is the clear land optical image in channel
;
is the background light;
is the underwater attenuation rate of channel
, which is calculated by Equation (
2);
represents the attenuation coefficients of different wavelengths of the light in water;
represents the depth information on image pixels.
The atmospheric scattering model is used to simulate the foggy effect of underwater optical images, which can be expressed as follows:
where
represents a foggy image; J(x) is a clear image;
is the transmittance of light;
A is the intensity of background light.
Given a clear land image, this study aimed to degrade it to an overall greenish-blue, fuzzy optical image of the water using the underwater degradation pipeline. The degradation coefficients of the pipeline were randomly set within a certain range. According to the UWCNN research [
36], four types of underwater attenuation coefficients were adopted in this study to generate different characteristics of underwater images. In addition, the depth of an underwater optical image was randomly assigned between 1.5 m and 8 m, and the depth value of the whole underwater image obeys the normal distribution. Further, the transmittance and background light intensity of an underwater scene were set randomly and used by the atmospheric scattering model to generate foggy underwater images with different degrees of ambiguity. The ranges of the degradation coefficients are shown in
Table 1, where
denotes a number randomly set between
a and
b, and
indicates the normal distribution with a mean value of
a and a standard deviation of
b.
After degenerating clear land images into underwater images, both the land images and the simulated degraded underwater images were input into the weight-sharing WG-CSP backbone. The features of the two types of images were extracted by the WG-CSP. In the channel dimension, the two extracted feature maps were concatenated and input into the UAET decoder. The UAET decoder consists of two fully connected layers that decode the concatenated feature maps to predict the degradation parameters that are randomly set in the underwater degradation pipeline. Thus, the UAET adopts self-supervised learning to predict the degradation parameters to assist the WG-CSP in extracting more intrinsic features. The more accurate the prediction result of UAET decoder of randomly set degradation parameters is, the more essential the features extracted by the WG-CSP are.
The UAET self-supervised module can assist the backbone of LUO-YOLOX through joint training to extract more intrinsic features from degraded underwater images. The operational principle of the SPJF is presented in
Figure 1. It should be noted that the SPJF framework represents a pre-training method based on land images and randomly degraded underwater images. After pre-training, the pre-trained model was retrained on real underwater datasets to achieve better results in underwater object detection.
3.5. Loss Function
The total loss of the proposed SPJF consists of two parts, which can be expressed by:
where
is the loss of the ODN;
is the loss of the UAET decoder;
and
are two hyper-parameters used to balance the loss function, and they are set to 1.0 and 0.01, respectively.
Moreover,
includes the classification loss, box regression loss, and confidence loss, which can be expressed by:
where
denotes the classification loss,
is the confidence loss, and
represents the box regression loss;
is the box regression loss; Iou stands for the intersection over union, which can be expressed by
; the
is the number of anchor points of the output feature maps;
indicates whether the anchor point is a positive sample; BCE stands for the binary cross entropy loss, which can be expressed by
;
and
are the probabilities of the
cth predicted class network and the corresponding ground truth, respectively;
and
are the confidence degrees of the prediction box
and its ground truth, respectively;
and
denote the prediction box and its ground truth, respectively.
Further,
includes the deviation loss and cosine similarity loss. The cosine similarity loss is used for gradient shunting for a multi-task framework to reduce the impact of the loss function, which is designed for the UAET in the object detection task. The
can be expressed as follows:
where
denotes the loss deviation between the predicted degradation parameter (
) and the corresponding ground truth (
);
is the cosine similarity loss;
and
are hyper-parameters;
E represents the encoder of the joint framework;
is the object detection decoder;
denotes the UAET decoder.
4. Experiments and Results
4.1. Training Parameters and Evaluation Metrics
The experiments were based on the general object detection framework MMDetection [
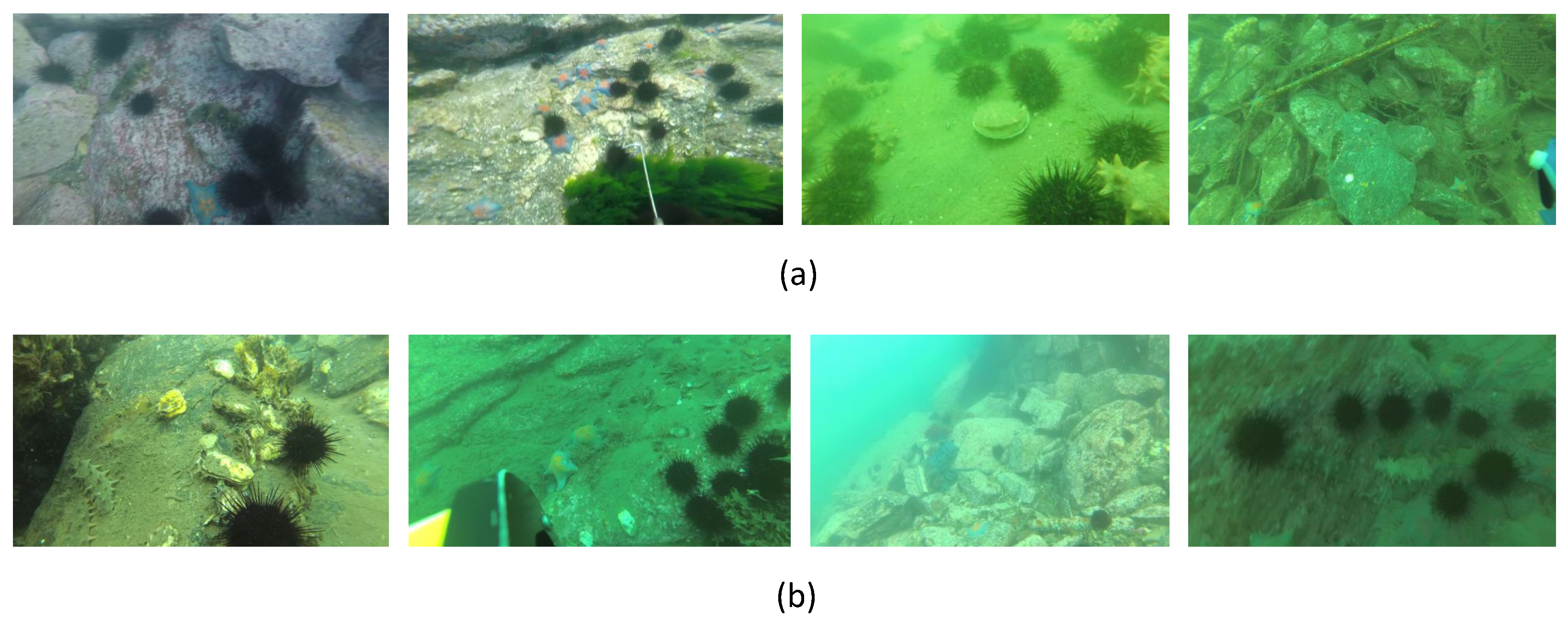
37]. The operating system was Ubuntu20.04, and Nvidia GeForce 2080ti GPU was used to train the proposed network. The proposed SPJF was trained on the Pascal VOC2012 dataset, which is a land image dataset. This dataset was randomly degraded into underwater images using the proposed underwater degradation pipeline. Then, the land image and the corresponding degraded image were input into the proposed joint framework together and used for the end-to-end training. The size of the training image was
, the batch size was 16, and the initial learning rate was 0.01. After the joint training for 100 epochs, the trained model is retrained on the URPC2021 and detecting underwater object (DUO) dataset for further model optimization. The URPC2021 contained four types of targets: holothurian, echinus, starfish, and scallop, including a total of 7600 underwater images divided into the training and test sets according to the ratio of 9:1. The DUO also contained four types of targets: holothurian, echinus, starfish, and scallop, including 7782 images, of which 6671 were used for training and 1111 for testing. Some of the samples of the two datasets are shown in
Figure 7.
In the training process on the underwater datasets, the image size was set to
, the batch size was 12, and the stochastic gradient descent (SGD) optimizer was used to optimize network parameters. The initial learning rate was set to 0.01, and the cosine annealing strategy [
38] was used to decrease the learning rate automatically as follows:
where
e is the number of epochs;
is the initial learning rate;
is a hyper-parameter.
The main evaluation metrics used in the experiments included the average precision of the ODN when the
threshold was set to 0.5 (AP50) and the mean average precision (AP). The AP was calculated by:
AP is the main metric by which to measure the performance of ODNs, which is defined as the percentage of the number of objects correctly detected in the total number of detected objects. Besides this, we also calculated the AR which denoted the average recall of the detection networks, the parameters (Params) and computational complexity (FLOPs) of the object detection networks. AR is defined as the percentage of the number of objects correctly detected of the total number of objects in the dataset.
4.2. Contrast Experiment
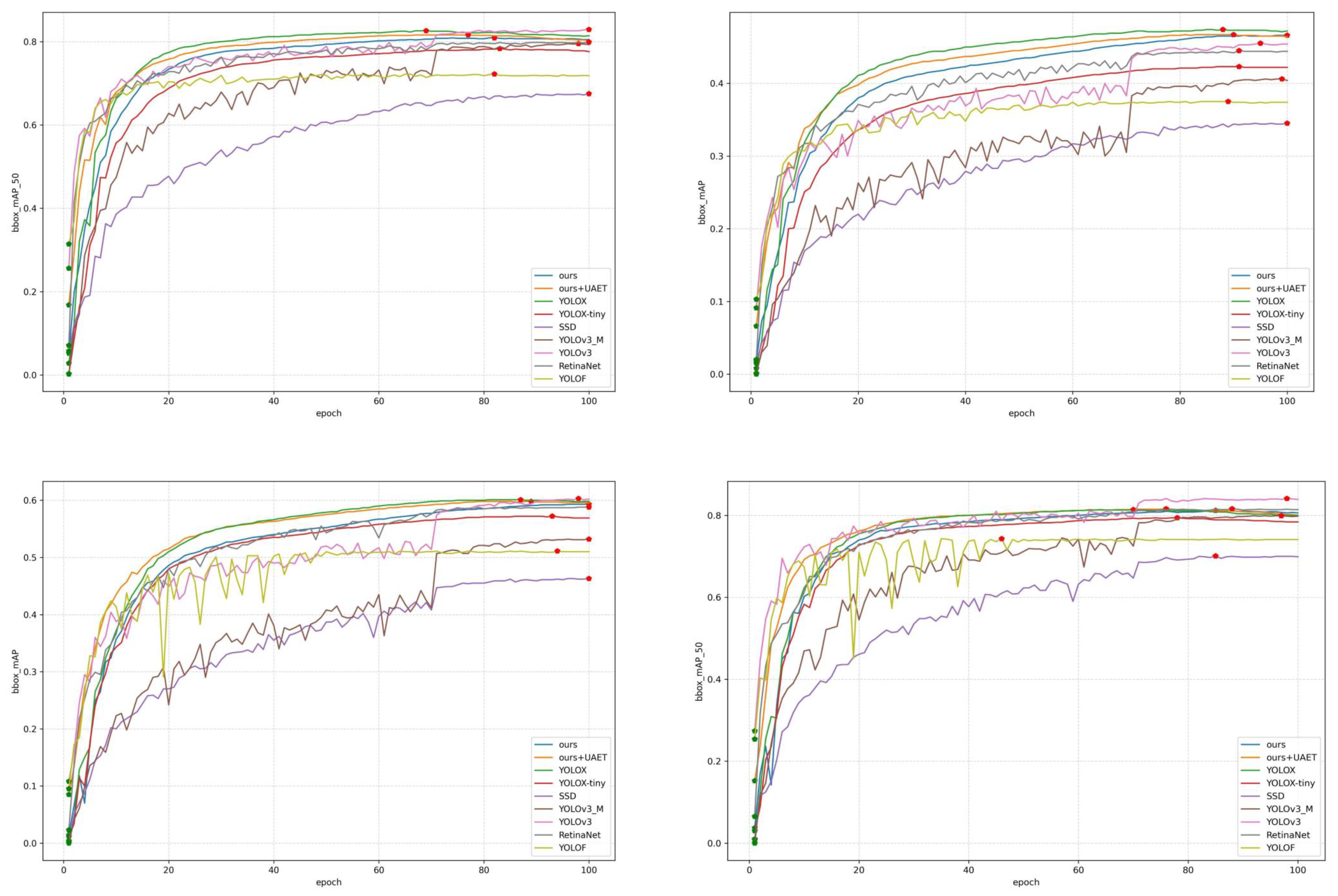
We compared our method with the state-of-art ODNs to verify the effectiveness of the proposed network model. For the fairness of comparison, the image size, batch size, and data augment method (random flip only) of all compared detection networks were the same during the training process. The results obtained on the URPC2021 and DUO datasets are shown in
Table 2. The average precision curves of the detection networks are displayed in
Figure 8. The graphs in the first row show the results on the URPC2021 dataset and those in the second row present the result on the DUO dataset. Further, the first-column figures display the AP curves, and the second-column figures show the AP50 curves. The green point denotes the result of the first epoch, while the red point represents the best result obtained after 100 epochs.
As shown in
Table 2, compared with the other models, the proposed model could guarantee a small number of parameters and low computational complexity and achieve high detection accuracy, which indicated that a good trade-off between the lightweight characteristic and the detection accuracy was achieved. The proposed model had slightly lower accuracy than the baseline YOLOX model [
11] but also had
fewer parameters. Compared with the other lightweight ODNs, such as YOLOX-tiny, SSD [
39] with the MoblieNetv3 [
40] backbone, and YOLOv3 [
16] with the MobileNetv3 backbone, the proposed model achieved a significant advantage in detection accuracy. In addition, compared with the RetinaNet [
20] and YOLOF [
41] models, the proposed network not only had a much smaller number of parameters but also achieved higher average precision on the two underwater datasets. The results in the last two rows in
Table 2 show that, after using the UAET for self-supervised pre-training, the average detection accuracy in the underwater object detection task was improved.
Table 2.
The experimental results on the URPC2021 and DUO datasets.
Table 2.
The experimental results on the URPC2021 and DUO datasets.
| Model | Backbone | URPC2021 | DUO | Params (M)↓ | FLOPs (G)↓ |
|---|
| AP↑ (%) | AP50↑ (%) | AP↑ (%) | AP50↑ (%) |
|---|
| SSD [39] | MobileNetv3 | 34.5 | 67.5 | 46.3 | 69.9 | 3.07 | 1.19 |
| YOLOF [41] | ResNet50 | 37.5 | 72.1 | 51.1 | 74.0 | 42.13 | 16.6 |
| RetinaNet [20] | ResNet50 | 44.5 | 79.8 | 58.8 | 81.5 | 36.17 | 34.83 |
| YOLOv3 [16] | MobileNetv3 | 40.6 | 79.5 | 53.2 | 79.9 | 3.67 | 2.78 |
| YOLOv3 [16] | DarkNet53 | 45.5 | 82.7 | 60.2 | 83.9 | 61.54 | 32.77 |
| YOLOX-tiny [11] | CSPDarkNet | 42.3 | 78.1 | 57.2 | 78.9 | 5.03 | 3.20 |
| YOLOX-s [11] | CSPDarkNet | 47.4 | 82.1 | 60.1 | 81.1 | 8.94 | 5.63 |
| Proposed LUO-YOLOX | WG-CSP | 46.3 | 80.7 | 59.3 | 80.9 | 5.31 | 3.81 |
| LUO-YOLOX + SPJF | WG-CSP | 46.7 | 81.5 | 59.6 | 81.6 | 5.31 | 3.81 |
Zhang et al. [
25] proposed a lightweight ODN that also achieves a good trade-off between accuracy and speed. We compared our method with it on the URPC dataset to verify the effectiveness of our method. The compared results are shown in
Table 3. We achieved the same mAP as Zhang et al. However, the parameters of our LUO-YOLOX are only half of it. Our detection speed is also faster.
4.3. Ablation Study
Next, the ablation experiments were conducted on the URPC2021 to further verify the effectiveness of the proposed SPJF. In the experiments, we set all the training parameters, such as image size, batch size, learning rate, and optimizer type as the same, as these parameters have a great impact on the trained models. In the first experiment, the normal pre-training method was used; namely, the LUO-YOLOX model was pre-trained directly on Pascal VOC2012 and the weights of the trained model were transferred to the underwater object detection task. In the second experiment, the images in the PASCAL VOC2012 dataset were degraded into underwater images using the underwater degrade pipeline. The obtained dataset was used to pre-train the LUO-YOLOX model for 100 epochs. Then, the weights of the pre-trained model were transferred to the underwater object detection task. In the last experiment, the proposed SPJF was used. The PASCAL VOC2012 dataset was degraded into underwater images, and the UAET module was used in the self-supervised pre-training to assist the backbone of the ODN to extract inherent features in the pre-training stage. The experimental results of the three experiments on the URPC2021 dataset are shown in
Table 4. The reason we did not train LUO-YOLOX with UAET without the underwater degradation pipeline is that the UAET module can be used for self-supervised learning only after using the underwater degradation pipeline to generate degraded images.
As shown in
Table 4, the performance of the ordinary pre-training was roughly equivalent to that of the pre-training with degraded images. However, the AP and AR of the object detection network were worse than those of the direct training on the underwater dataset without a pre-training strategy. This could be caused by the domain shift phenomenon between the clear land images and the underwater images, which meant that weights obtained by the pre-training process on the land images could not match underwater target detection well. Compared with the two pre-trained cases, when the weights obtained by the proposed SPJF were transferred to the underwater object detection task, both the average precision and the average recall rate were improved. This proved that the proposed method could solve the domain shift problem to a certain extent when performing transfer learning.
It has been assumed that using the COCO dataset as a land dataset could ensure higher precision than using the PASCAL VOC2012 dataset. Namely, compared to the PASCAL VOC2012 dataset, the COCO dataset includes more data samples and richer objects, which is beneficial in terms of the ODN learning more features during the pre-training stage. However, training a prediction model on the COCO dataset requires using a high-performance GPU. Therefore, if the subsequent experimental equipment allows, this type of model training will be performed in future work.
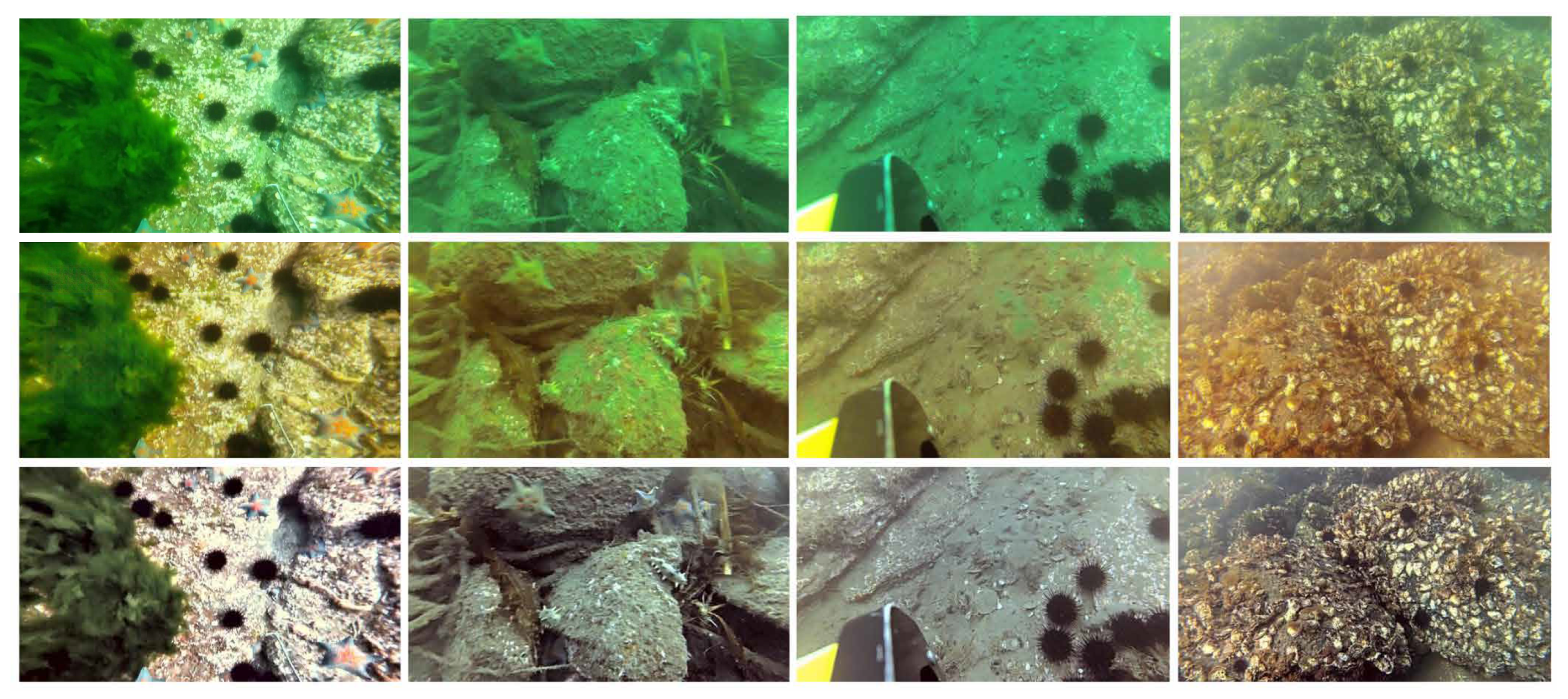
4.4. Effect of Image Enhancement on Object Detection Results
In this subsection, the effect of image enhancement on the object detection result is analyzed. The MLLE [
42] and FUnIE-GAN [
43] methods were selected as image enhancement algorithms to enhance images in the URPC2021 dataset. The former is a traditional image enhancement algorithm and the latter is a DL-based algorithm. The results obtained by the two methods on the URPC2021 dataset are shown in
Figure 9.
The enhanced URPC2021 dataset was used to train the proposed lightweight object detection network (i.e., the LUO-YOLOX model). The results on this dataset are shown in
Table 5, where it can be seen that, different from general cognition, the performance of the detector was not improved by using the enhanced images for training. The low detection accuracy after using the image enhancement method could be caused by the difference in the two tasks’ evaluation metrics and optimized targets. In addition, there was a domain shift between underwater images and enhanced images, which caused low average recall efficiency [
44]. After using the proposed SPJF, the recall in the underwater object detection tasks was improved significantly, as well as the AP.
4.5. Visualization of Detection Results
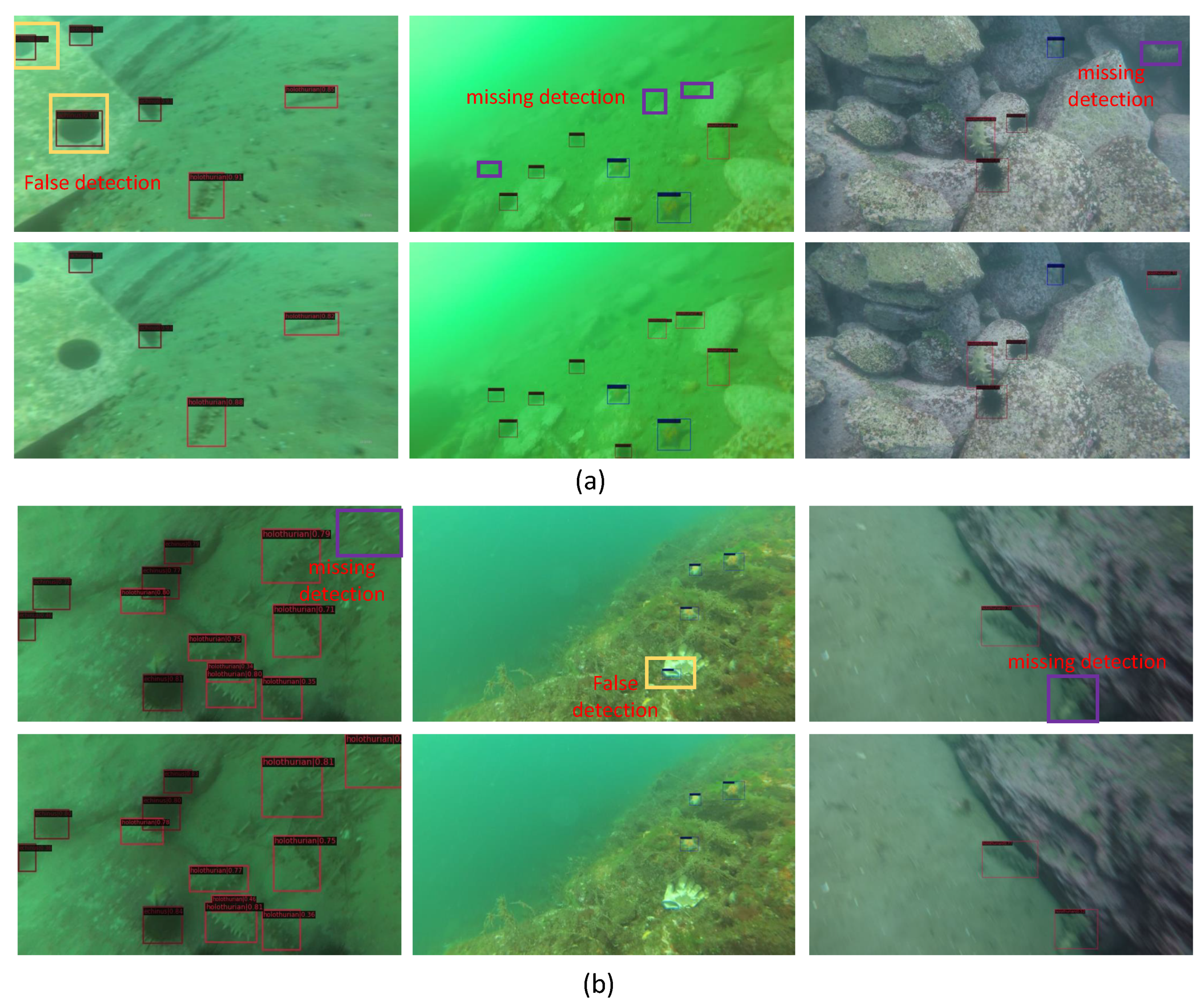
The detection results of our methods on the URPC2021 and DUO datasets are presented in
Figure 10. (a) shows the results on the DUO dataset. (b) shows the result on the URPC2021 dataset. The first rows of
Figure 10a,b show the results directly obtained by the proposed LUO-YOLOX. The second rows present the results detected by LUO-YOLOX pre-trained by the proposed framework. Yellow boxes denote false detection targets and purple boxes denote missing detection targets. The method directly detected targets by the LUO-YOLOX model, facing the problem of missing and false detection. As shown in the first row in
Figure 10a, a number of holothurian and starfish targets were missed; the ODN mistakenly identified water plants as holothurian, which was not beneficial for the improvement of the accuracy of the underwater ODNs. The first row in
Figure 10b indicates the same problem. The underwater detection network incorrectly identified the blue gloves as starfish, and some of the holothurian targets were also missed. However, after using the proposed SPJF to pre-train the LUO-YOLOX model, the mentioned problems were effectively alleviated. The second row in
Figure 10a,b shows that the category and position of the targets were accurately identified and located without any missing or false detection.
The detection result shows that the performance of the proposed object detection network, the LUO-YOLOX model, became more stable after using the proposed SPJF.
5. Discussion
Compared with other ODNs, the LUO-YOLOX we proposed ensures high AP with a small number of parameters and low computational complexity in underwater object detection tasks. The SPJF we proposed guides the backbone of underwater ODNs to extract more essential features from the underwater images in the manner of self-supervised learning. This improves the accuracy and robustness of the underwater ODNs without increasing any parameters and computational complexity. In this paper, we successfully used it to assist the proposed LUO-YOLOX.
However, our methods have some limitations. Due to the large number of multi-branches in LUO-YOLOX, the detection speed of our LUO-YOLOX is slower compared with YOLOX even though its computation complexity is lower. We tested the detection speed on the Nvidia GeForce 2080ti GPU. The detection rate of the LUO-YOLOX is 50 images per second while the detection rate of the YOLOX is 70 images per second. However, compared to most other underwater ODNs, LUO-YOLOX still has an advantage in terms of detection speed.
In the following study, we will try to simplify the branch of LUO-YOLOX and design a more efficient structure to increase the detection speed of the network. Moreover, we will use a larger land dataset to train the proposed SPJF. We speculate that SPJF will achieve more satisfactory results with a larger amount of data. Moreover, our UUVs are being developed in Qindao, China. Once the project progress meets the experimental conditions, we will conduct experiments to capture real underwater images and test the performance of our method on them.
6. Conclusions
In this paper, a lightweight underwater object detection network called the LUO-YOLOX, which can be implemented in the low-power processors of UUVs, was proposed. The proposed network can achieve high detection accuracy under a small number of parameters and at low computational complexity in underwater object detection tasks. It achieves an accuracy of 80.7% on the URPC2021 dataset and 80.9% on the DUO dataset. To solve the problems of color distortion and unclear target features of underwater images, the SPJF framework, which can be used to guide the backbone of an underwater object detection network to extract more intrinsic and robust target features from degraded underwater images, was developed. A large number of comparison and ablation experiments have been conducted to verify the proposed framework and detection model. The results demonstrate the high effectiveness of the proposed lightweight object detection network and SPJF framework.
Author Contributions
Conceptualization, Z.W. and H.C.; methodology, H.C.; software, H.C.; validation, Z.W., H.C. and Q.C.; formal analysis, Z.W.; investigation, H.C.; resources, Z.W.; data curation, H.C.; writing—original draft preparation, H.C.; writing—review and editing, H.C.; visualization, H.C.; supervision, Z.W.; project administration, H.Q.; funding acquisition, H.Q. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China under grant 51979057, 52131101, 52025111, China.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All the data that support the findings in this study are given by contacting the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AP | Average precision |
| AR | Average recall |
| CNN | convolutional neural network |
| DAH | Decoupled anchor-free head |
| DUO | Detecting underwater objects |
| DL | Deep learning |
| DPM | Deformable part-based model |
| FPN | Feature pyramid network |
| HOG | Histograms of oriented gradients |
| LUO-YOLOX | lightweight underwater object detection network based on the YOLOX |
| ODN | Object detection network |
| PSNR | Peak signal-to-noise ratio |
| PANet | Path aggregation network |
| SSIM | Structural similarity |
| SPJF | Self-supervised pre-training joint framework |
| SE | Squeeze-and-excitation |
| S-WG | Shuffle-weighted ghost |
| SPP | Spatial pyramid pooling |
| SPPF | spatial pyramid pooling-faster |
| UAET | Underwater auto-encoder transformation |
| UUV | Unmanned underwater vehicle |
| WG | Weighted ghost |
| WG-CSP | Weighted ghost-CSPDarknet |
References
- Yu, J.; Xianglong, P.; Mingzhu, X.; Chong, W.; Hong, Q. An Underwater Human–Robot Interaction Using Hand Gestures for Fuzzy Control. Int. J. Fuzzy Syst. 2021, 23, 1879–1889. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhao, M.; Wang, C.; Wei, F.; Qi, H. A Method for Underwater Human–Robot Interaction Based on Gestures Tracking with Fuzzy Control. Int. J. Fuzzy Syst. 2021, 23, 2170–2181. [Google Scholar] [CrossRef]
- Wang, G.; Wei, F.; Jiang, Y.; Zhao, M.; Wang, K.; Qi, H. A Multi-AUV Maritime Target Search Method for Moving and Invisible Objects Based on Multi-Agent Deep Reinforcement Learning. Sensors 2022, 22, 8562. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Volume 42, pp. 740–755. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–308. [Google Scholar]
- Liu, R.; Fan, X.; Zhu, M.; Hou, M.; Luo, Z. Real-World Underwater Enhancement: Challenges, Benchmarks, and Solutions Under Natural Light. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 4861–4875. [Google Scholar] [CrossRef]
- Yu, H.; Li, X.; Feng, Y.; Han, S. Multiple attentional path aggregation network for marine object detection. Appl. Intell. 2022, 53, 2434–2451. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, X.; Pan, M.; Yuan, L.; Zhang, Y.; Yuan, M.; Lv, S.; Yu, H. A marine organism detection framework based on the joint optimization of image enhancement and object detection. Sensors 2021, 21, 7025. [Google Scholar] [CrossRef] [PubMed]
- Venkatesh Alla, D.N.; Jyothi, B.N. Vision-based Deep Learning algorithm for Underwater Object Detection and Tracking. In Proceedings of the International Journal of Computer Vision, Xiamen, China, 19–21 August 2022; pp. 1–6. [Google Scholar]
- Tang, L.; Xu, H.; Wu, H.; Tan, D.; Gao, L. Research on Collaborative Object Detection and Recognition of Autonomous Underwater Vehicle Based on YOLO Algorithm. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2022; pp. 1664–1669. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Liu, C.; Li, H.; Wang, S.; Zhu, M.; Wang, D.; Fan, X.; Wang, Z. A dataset and benchmark of underwater object detection for robot picking. In Proceedings of the 2021 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), Shenzhen, China, 5–9 July 2021; pp. 1–6. [Google Scholar]
- Navneet, D.; Bill, T. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference On Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [Green Version]
- Shaoqing, R.; Kaiming, H.; Ross, G.; Jian, S. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1–9. [Google Scholar]
- Joseph, R.; Ali, F. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A single-stage object detection framework for industrial applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Yeh, C.H.; Lin, C.H.; Kang, L.W.; Huang, C.H.; Lin, M.H.; Chang, C.Y.; Wang, C.C. Lightweight deep neural network for joint learning of underwater object detection and color conversion. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6129–6143. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Y.; Sun, X.; Liu, J. Composited FishNet: Fish Detection and Species Recognition From Low-Quality Underwater Videos. IEEE Trans. Image Process. 2021, 30, 4719–4734. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Ye, X.; Wang, S.; Li, P. ULO: An Underwater Light-Weight Object Detector for Edge Computing. Machines 2022, 10, 629. [Google Scholar] [CrossRef]
- Chen, L.; Jiang, Z.; Tong, L.; Liu, Z.; Zhao, A. Perceptual Underwater Image Enhancement With Deep Learning and Physical Priors. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 3078–3092. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, S.; Song, W.; He, Q.; Wei, Q. Lightweight underwater object detection based on yolo v4 and multi-scale attentional feature fusion. Remote. Sens. 2021, 13, 4706. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. Ghostnet: More features from cheap operations. In Proceedings of the IEEE/CVF Conference On Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1580–1589. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. Shufflenet: An extremely efficient convolutional neural network for mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6848–6856. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference On Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Cui, Z.; Qi, G.J.; Gu, L.; You, S.; Zhang, Z.; Harada, T. Multitask aet with orthogonal tangent regularity for dark object detection. In Proceedings of the IEEE/CVF Conference On Computer Vision and Pattern Recognition, Montreal, QC, Canada, 10–17 October 2021; pp. 2553–2562. [Google Scholar]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2012, 21, 1756–1769. [Google Scholar] [CrossRef]
- Li, C.; Anwar, S.; Porikli, F. Underwater scene prior inspired deep underwater image and video enhancement. Pattern Recognit. 2020, 98, 107038. [Google Scholar] [CrossRef]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y. MMDetection: Open mmlab detection toolbox and benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
- He, T.; Zhang, Z.; Zhang, H.; Zhang, Z.; Xie, J.; Li, M. Bag of tricks for image classification with convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 558–567. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, the Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Chen, Q.; Wang, Y.; Yang, T.; Zhang, X.; Cheng, J.; Sun, J. You only look one-level feature. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Nashville, TN, USA, 20–25 June 2021; pp. 13039–13048. [Google Scholar]
- Zhang, W.; Zhuang, P.; Sun, H.H.; Li, G.; Kwong, S.; Li, C. Underwater image enhancement via minimal color loss and locally adaptive contrast enhancement. IEEE Trans. Image Process. 2022, 31, 3997–4010. [Google Scholar] [CrossRef]
- Islam, M.J.; Xia, Y.; Sattar, J. Fast underwater image enhancement for improved visual perception. IEEE Robot. Autom. Lett. 2020, 5, 3227–3234. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zhu, L.; Xu, L.; Xie, Q. Research on the Correlation between Image Enhancement and Underwater Object Detection. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 5928–5933. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









