Development and Validation of Quasi-Eulerian Mean Three-Dimensional Equations of Motion Using the Generalized Lagrangian Mean Method


Abstract
:1. Introduction
2. Derivation of the Quasi-Eulerian Mean Equations of Motion
2.1. Derivation of Quasi-Eulerian Mean Equations of Motion
2.1.1. Derivation of Quasi-Eulerian Mean Momentum Equation
2.1.2. Mass Conservation Equation
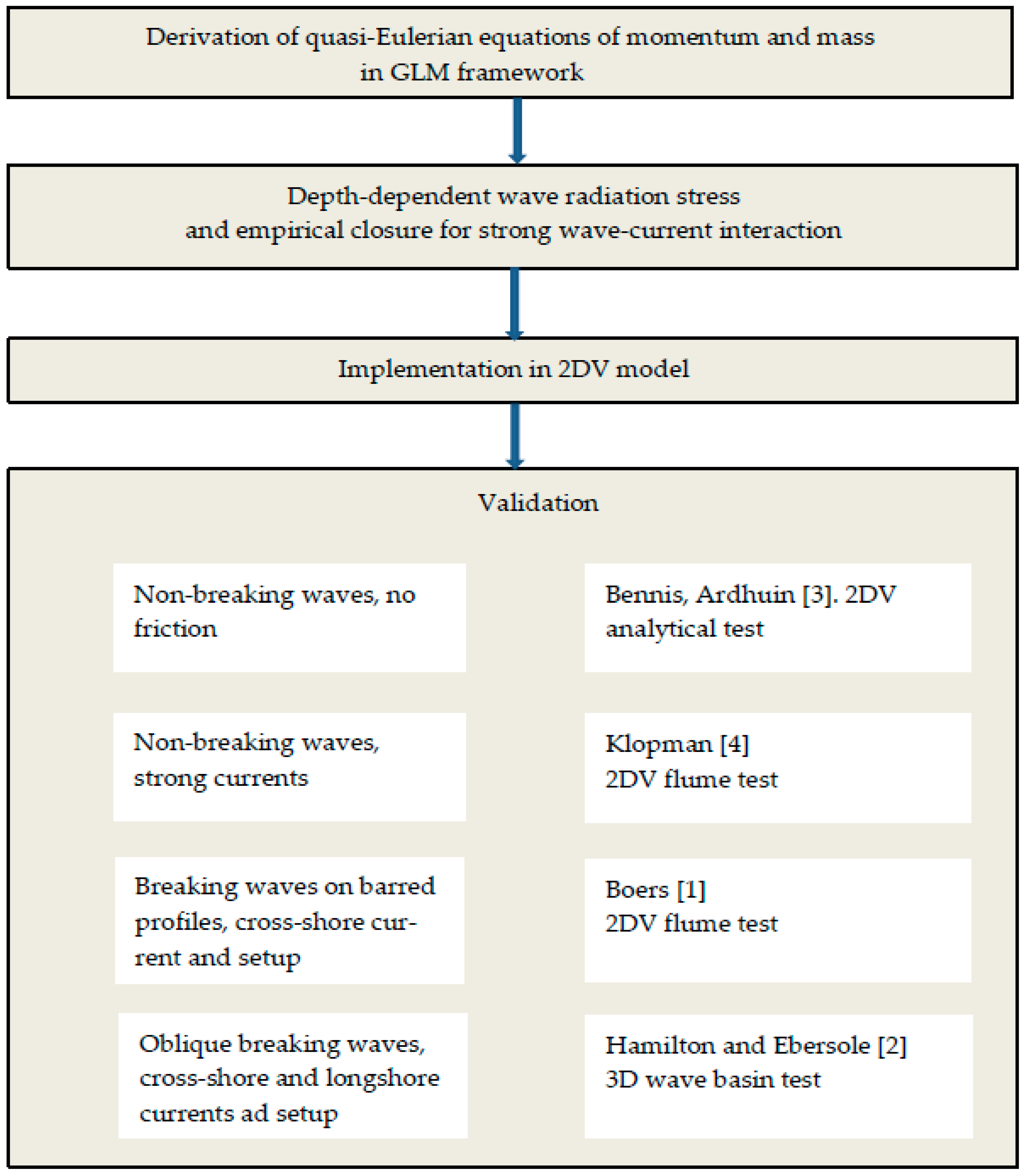
3. Validation of Quasi-Eulerian Mean Equations of Motion
3.1. Model Implementation
3.1.1. DV Governing Equations
3.1.2. Depth-Dependent Wave Radiation Stress in the 2DV Model
3.1.3. Bottom Boundary Layer Thickness in the Wave–Current Interaction Condition
3.2. Numerical Approximation
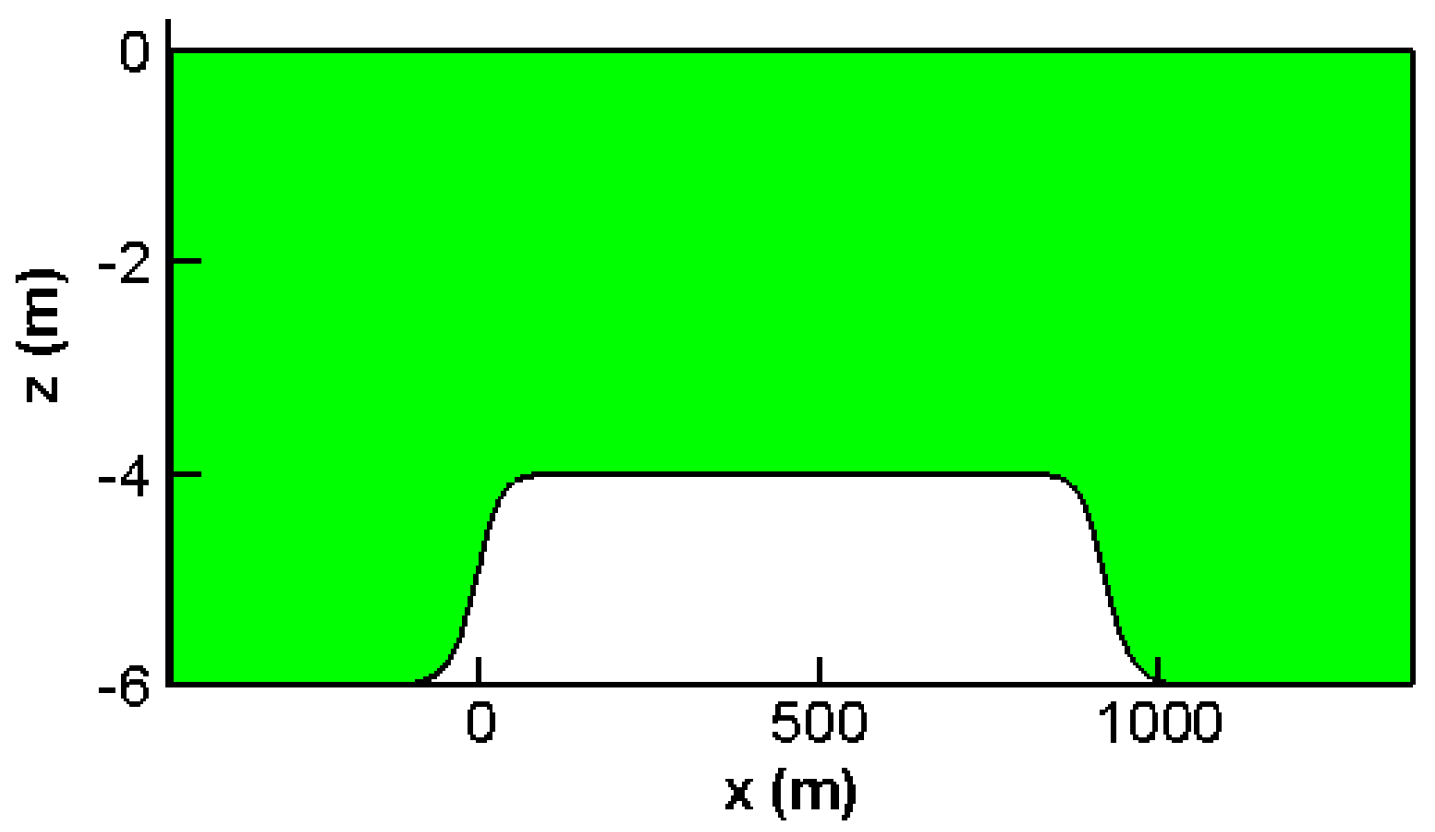
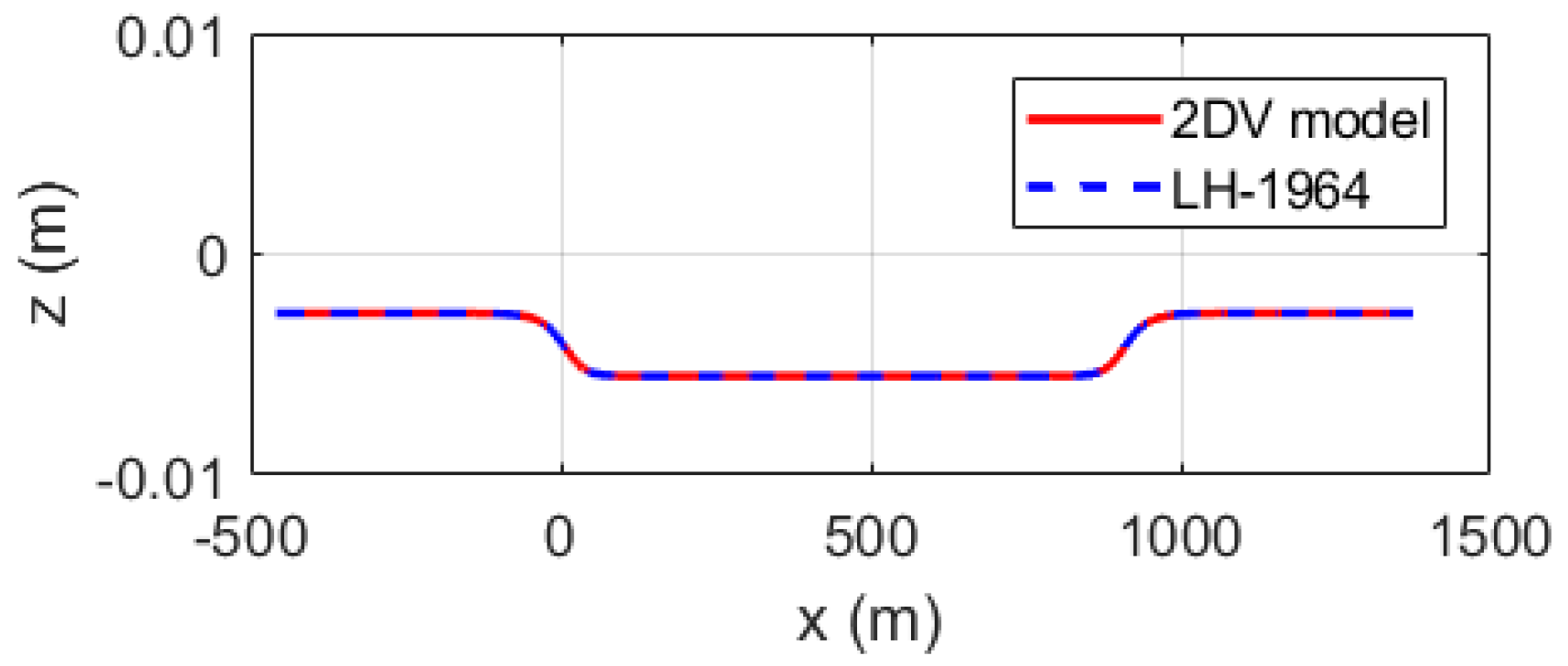
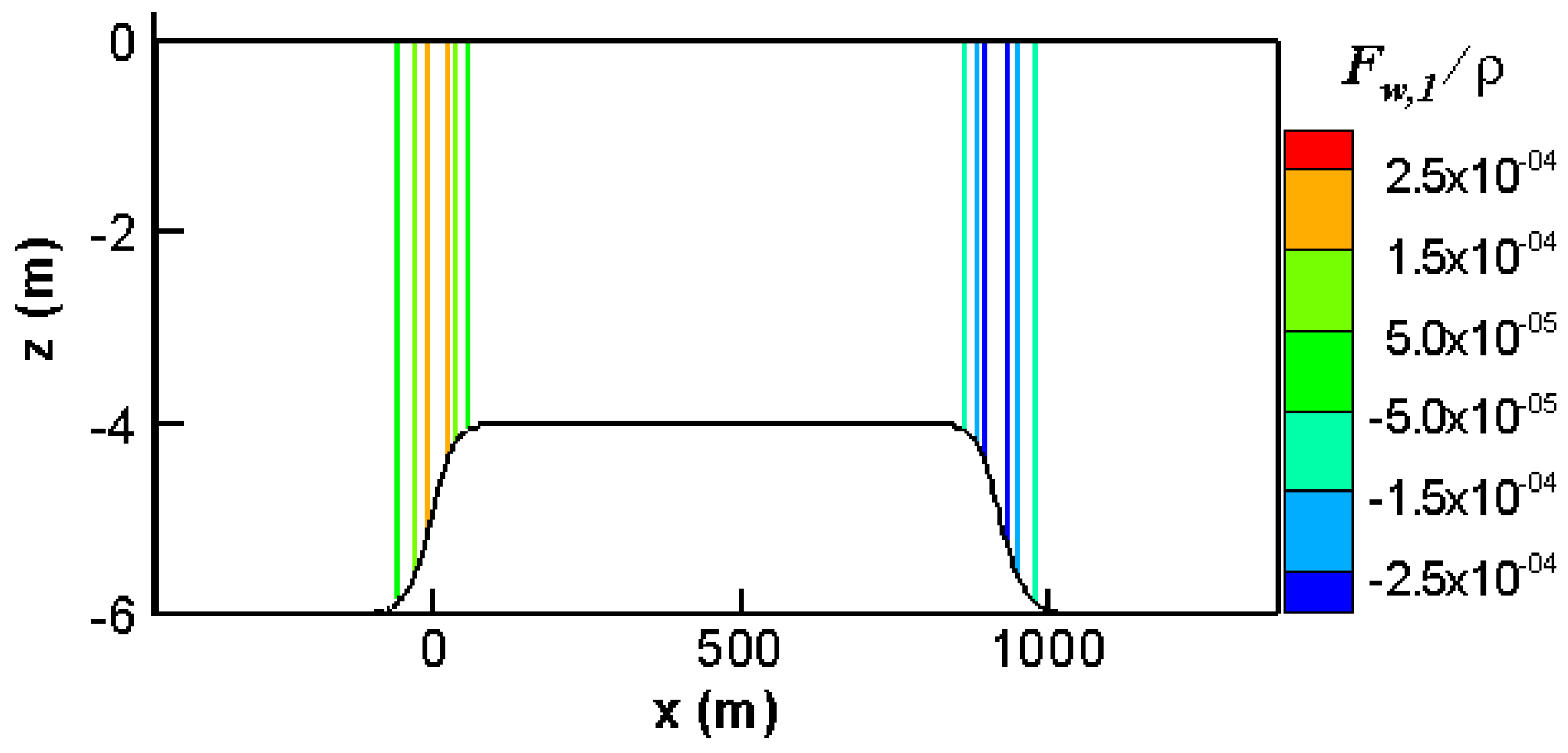
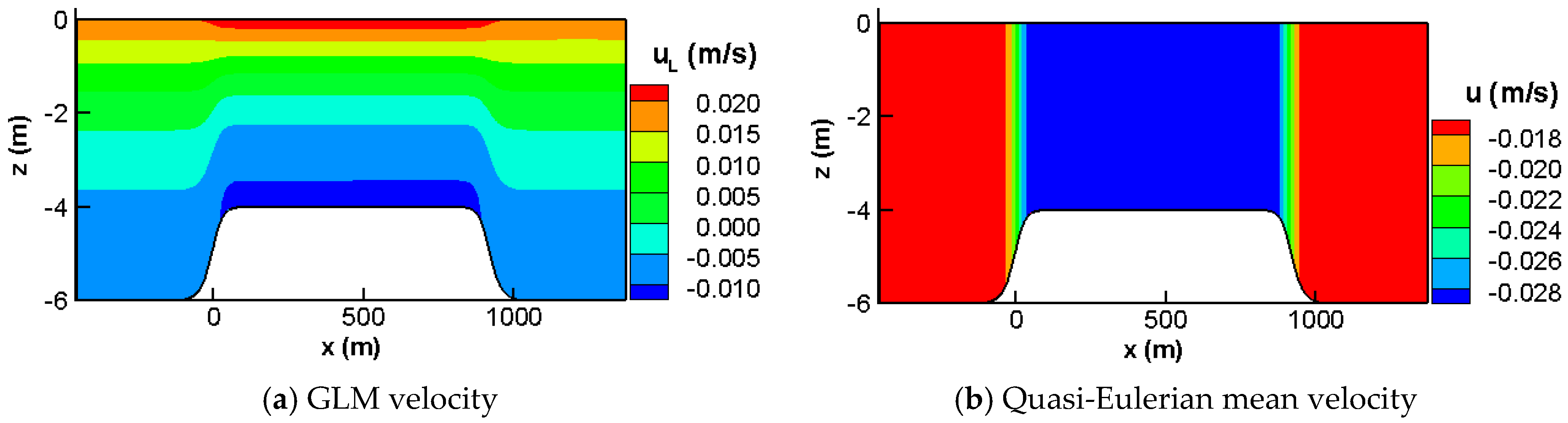
3.3. Adiabatic Test
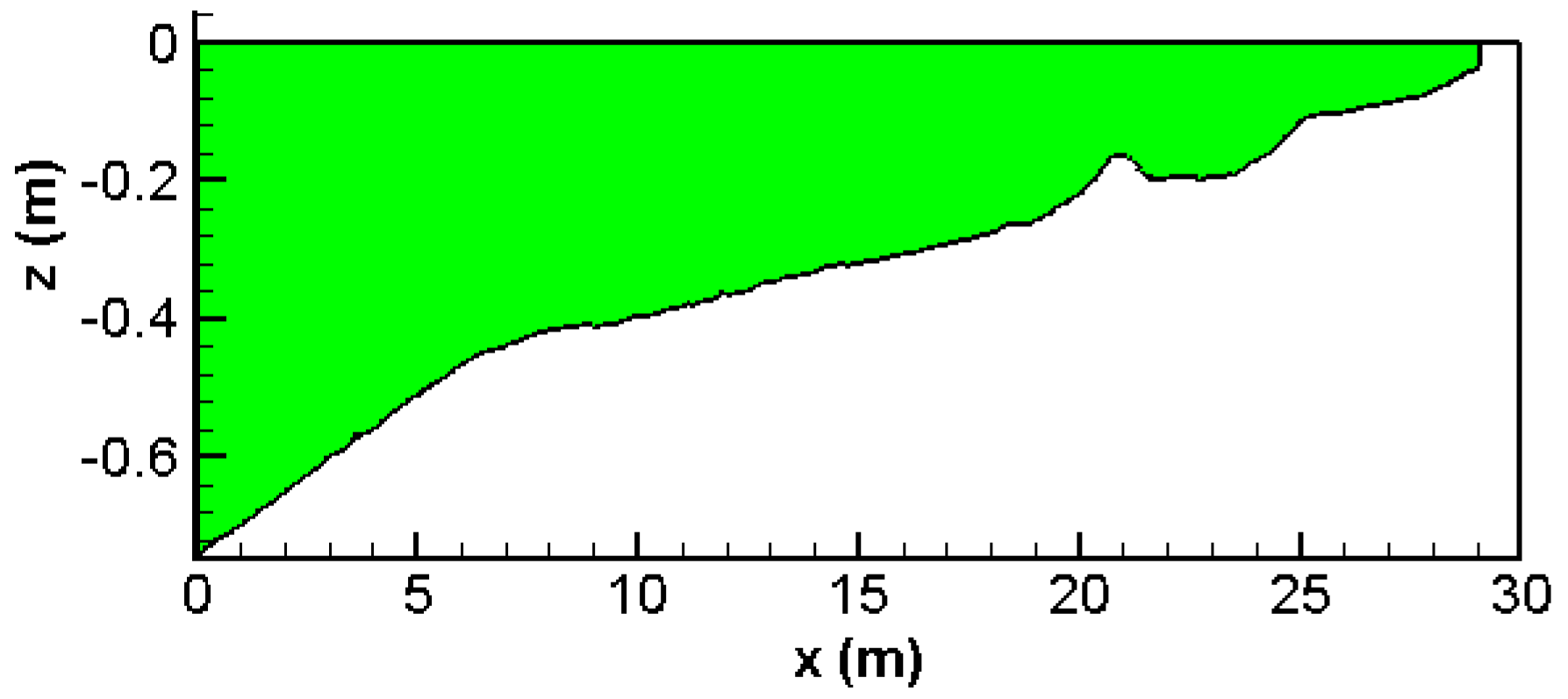
3.3.1. Bathymetry
3.3.2. Boundary Conditions
3.3.3. Numerical Results
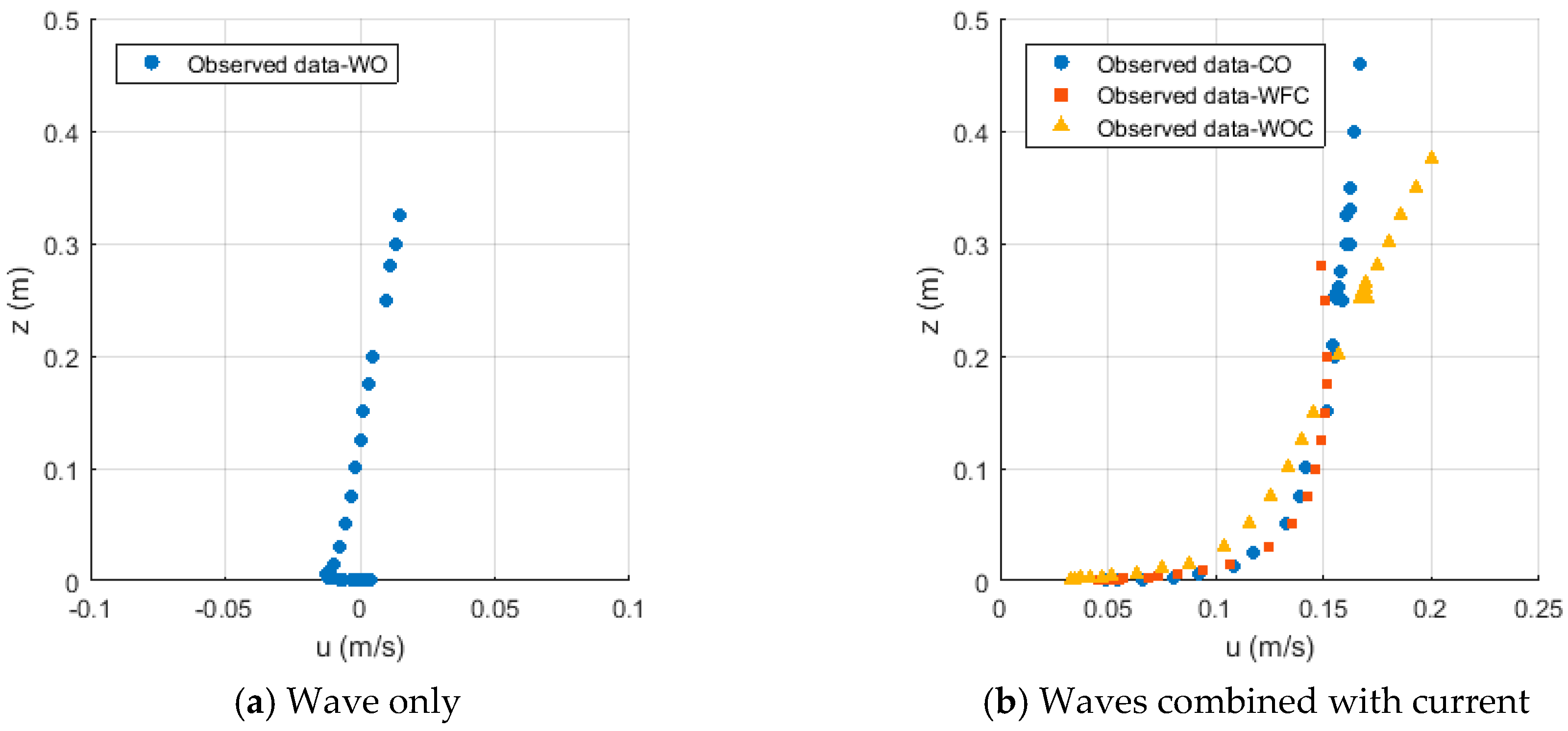
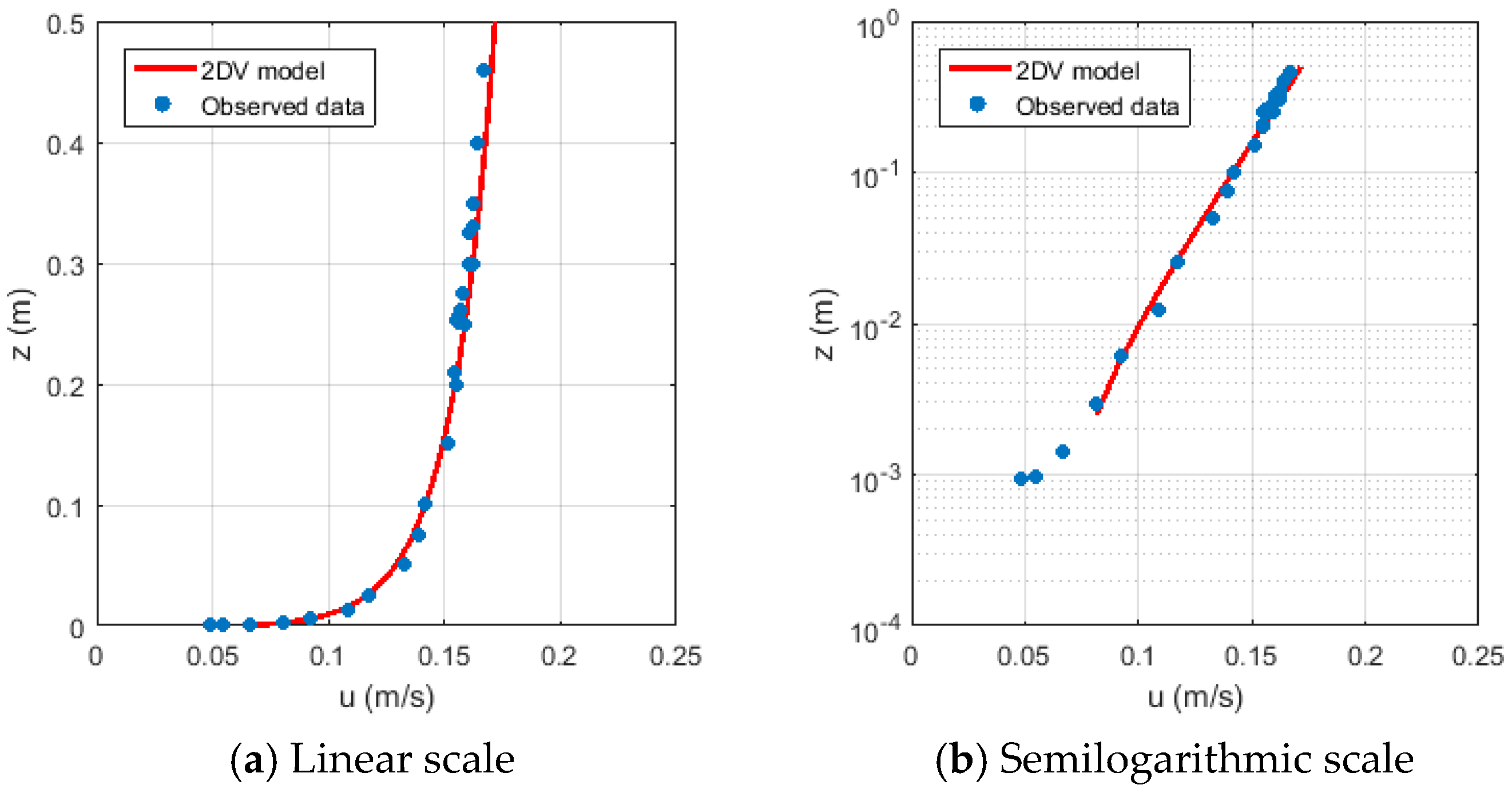
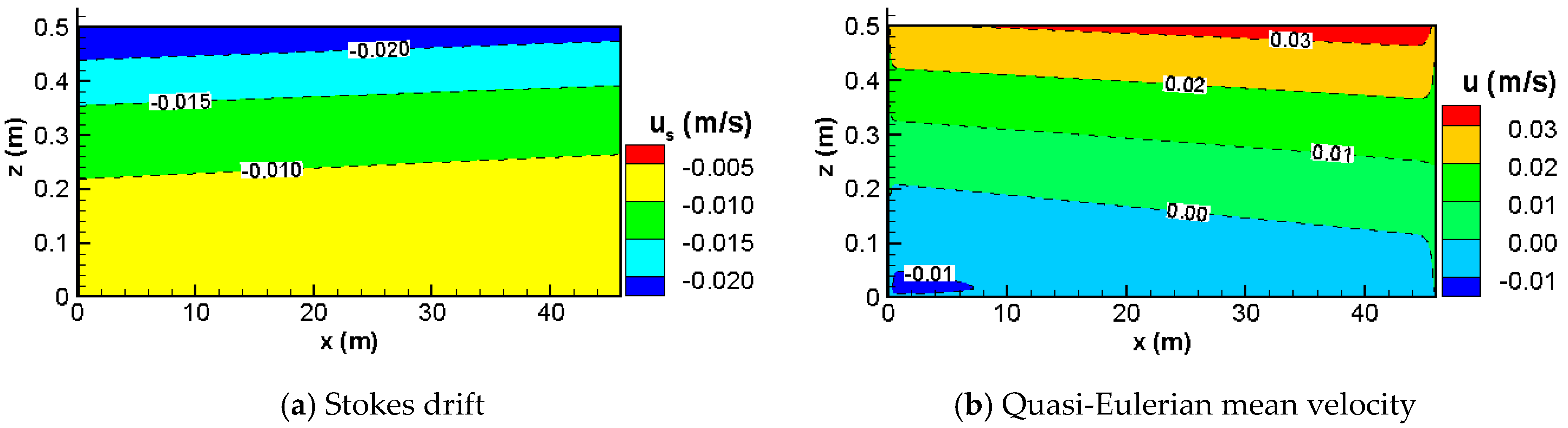
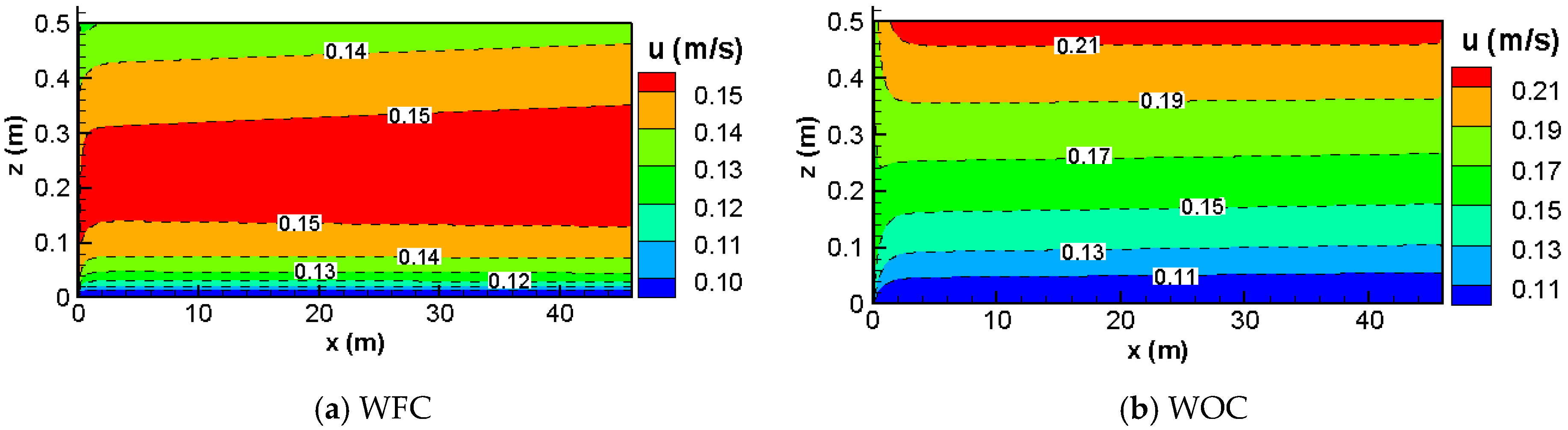
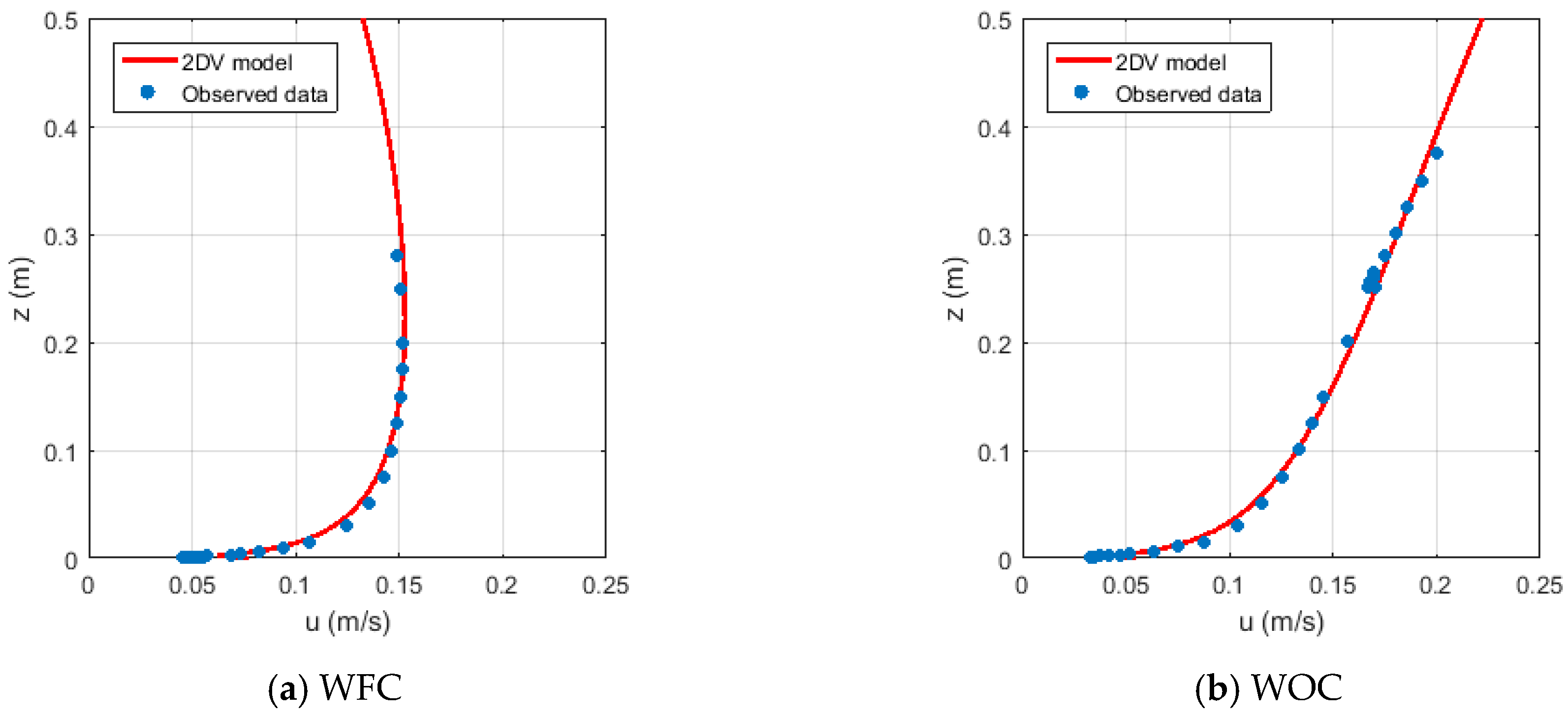
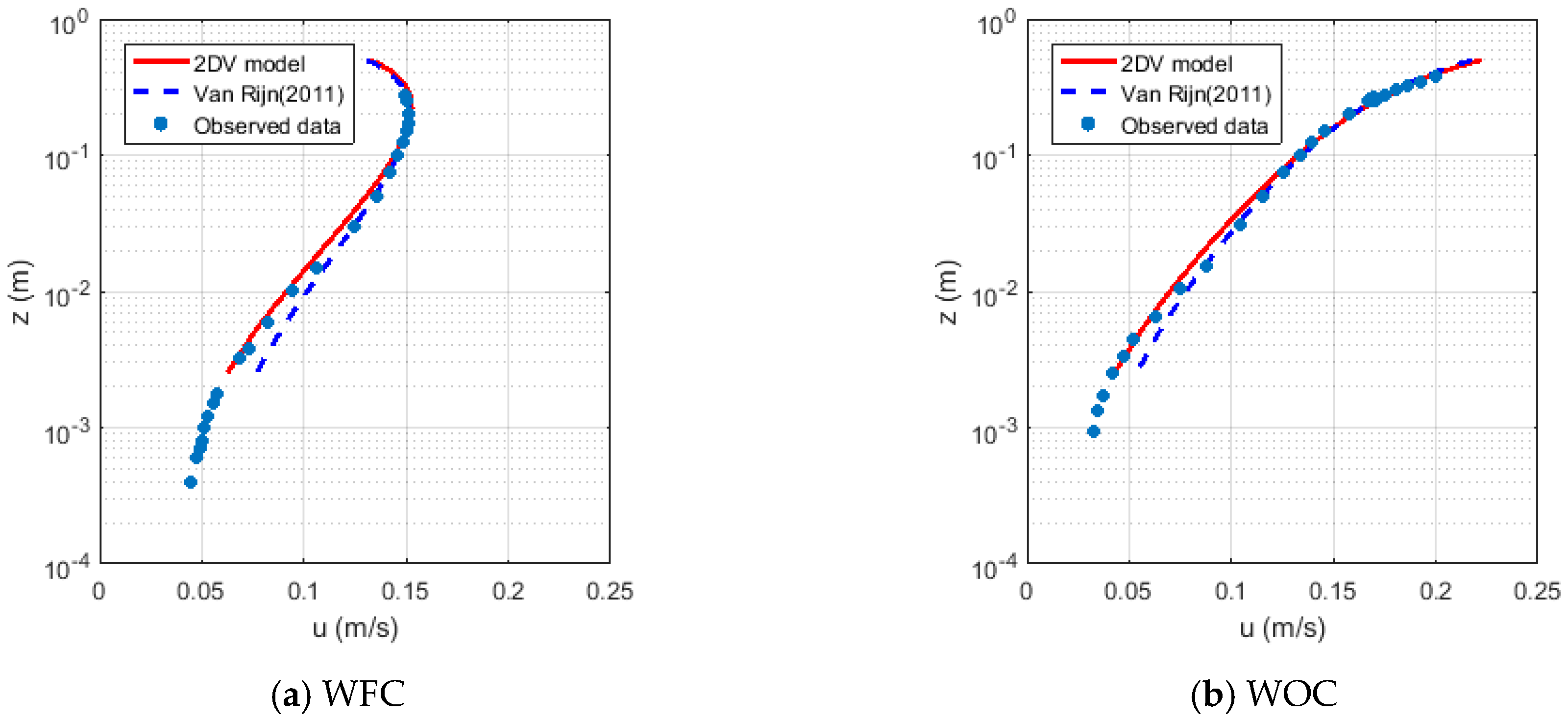
3.4. Mean Current in the Presence of Non-Breaking Waves
3.4.1. Input Parameters
3.4.2. Boundary Conditions
3.4.3. The Numerical Results
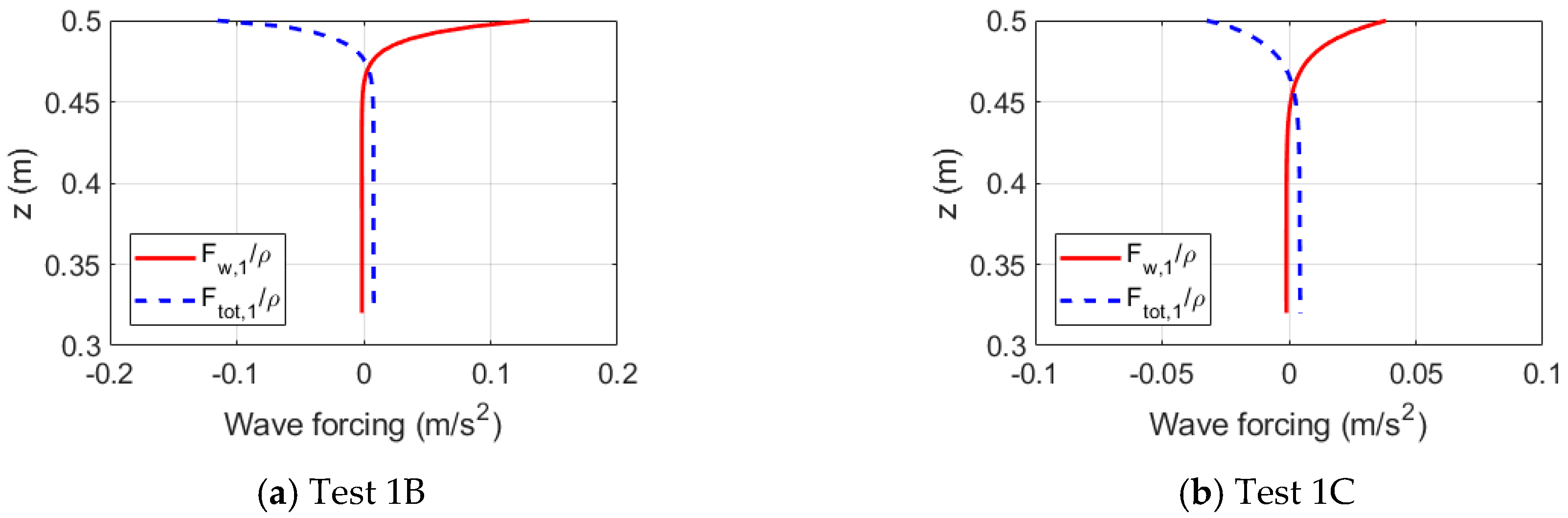
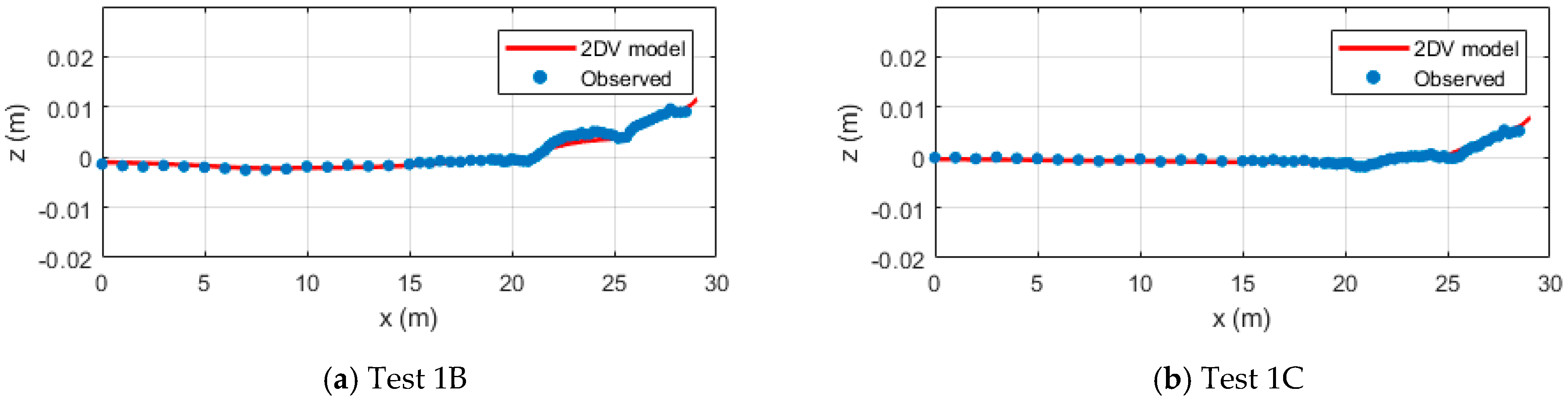
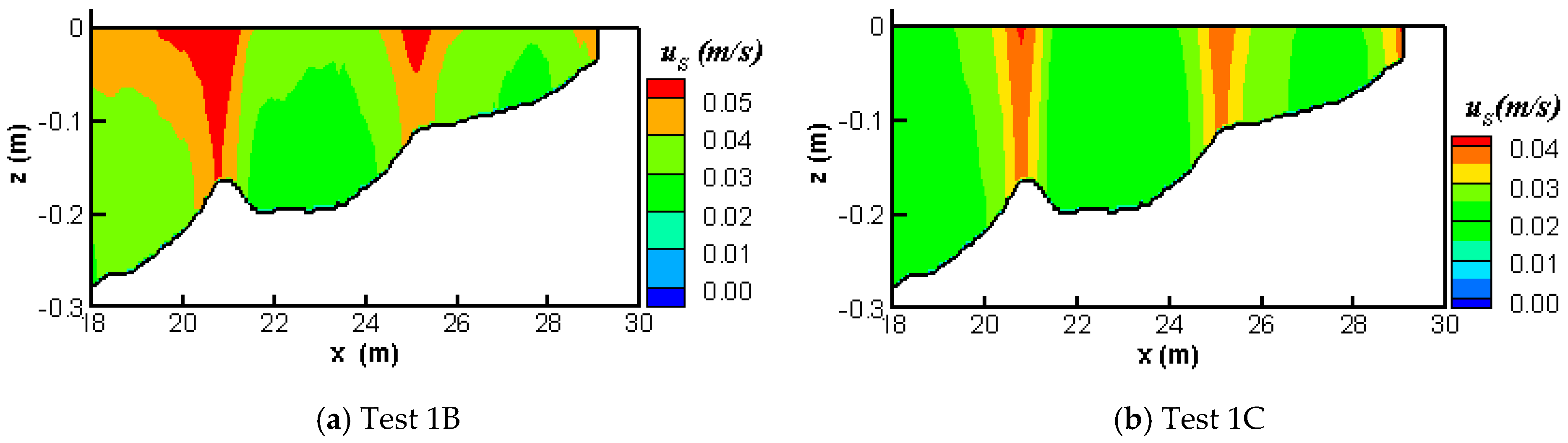
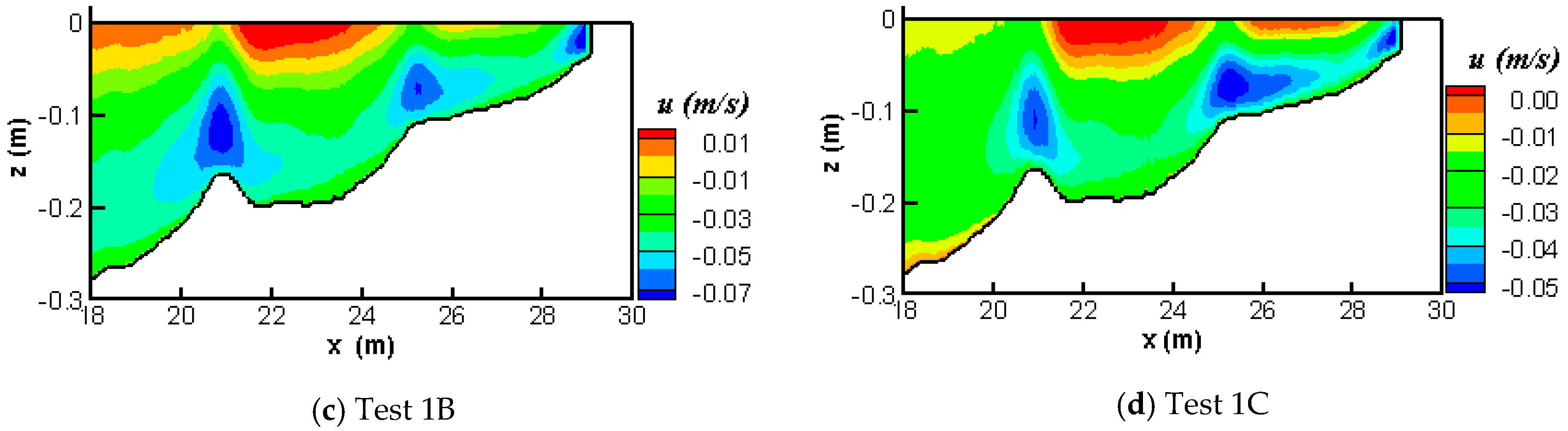
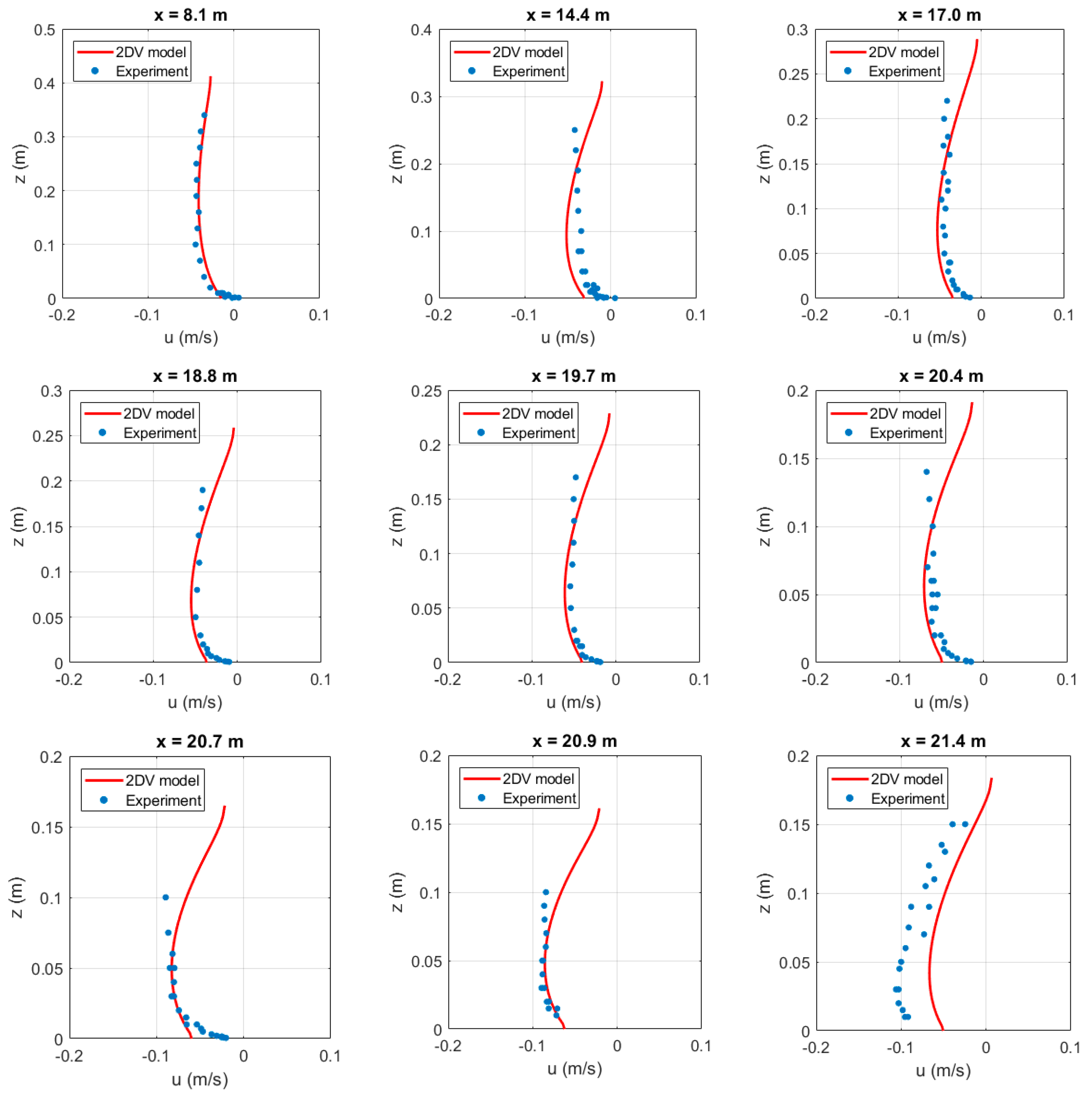
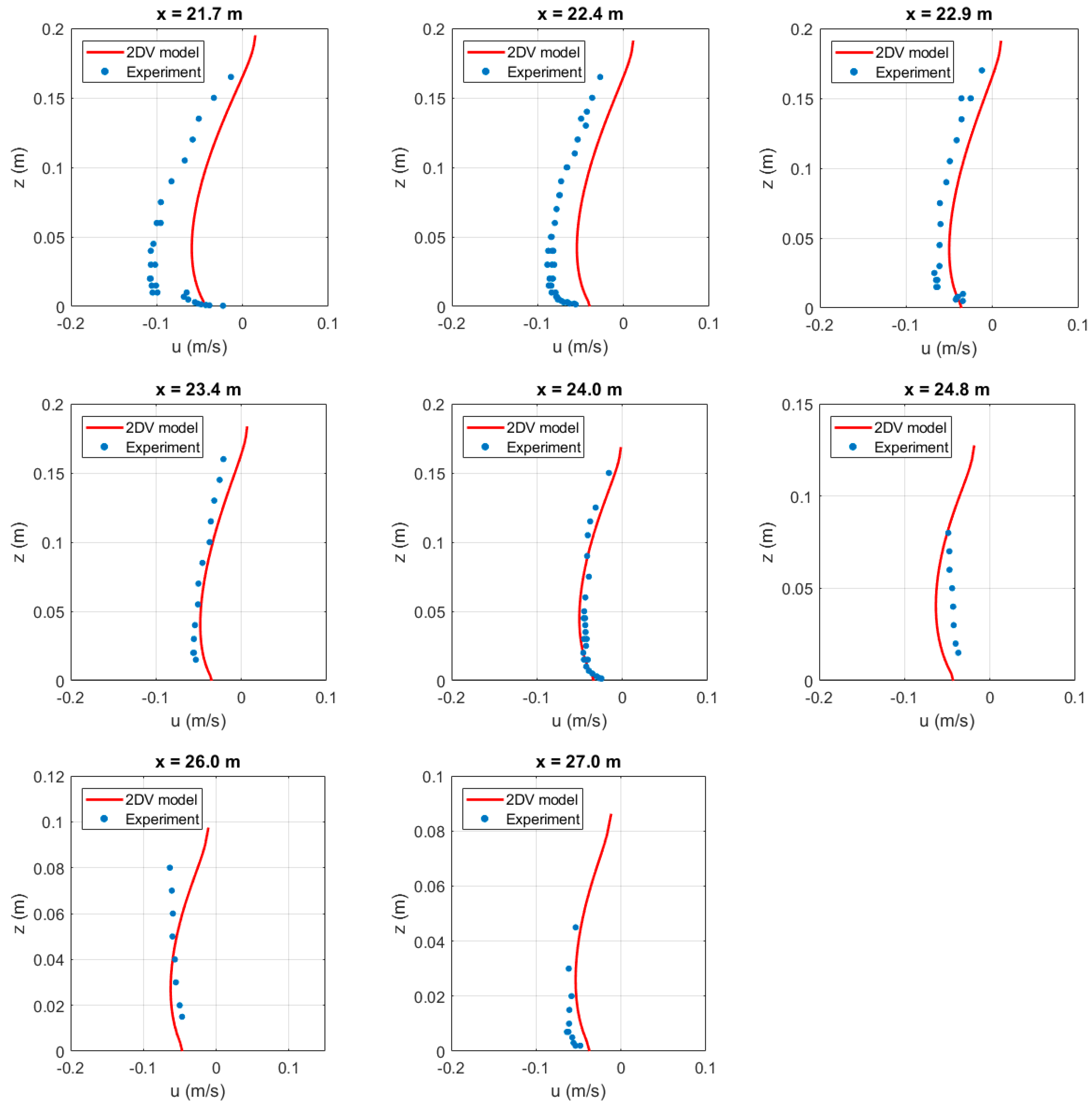
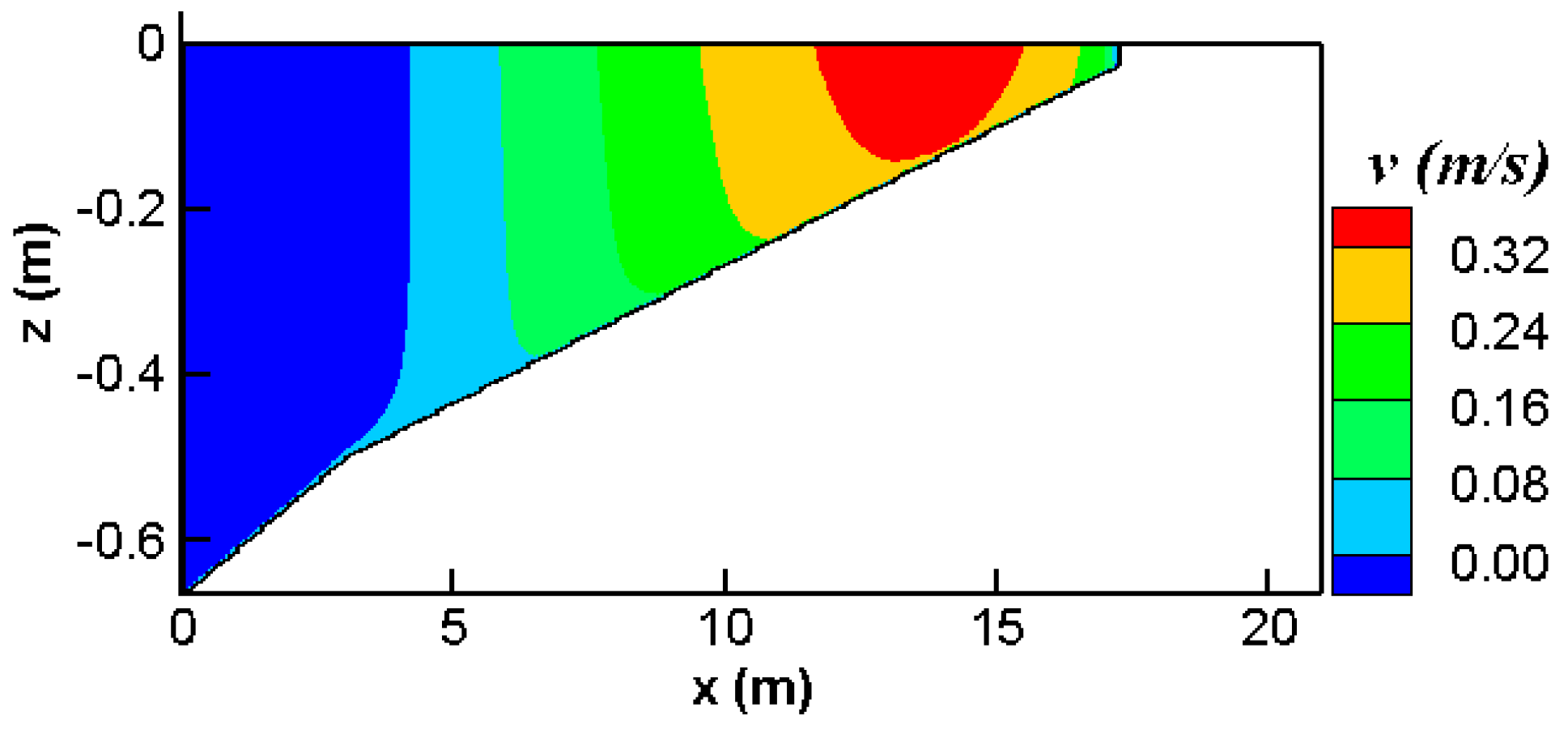
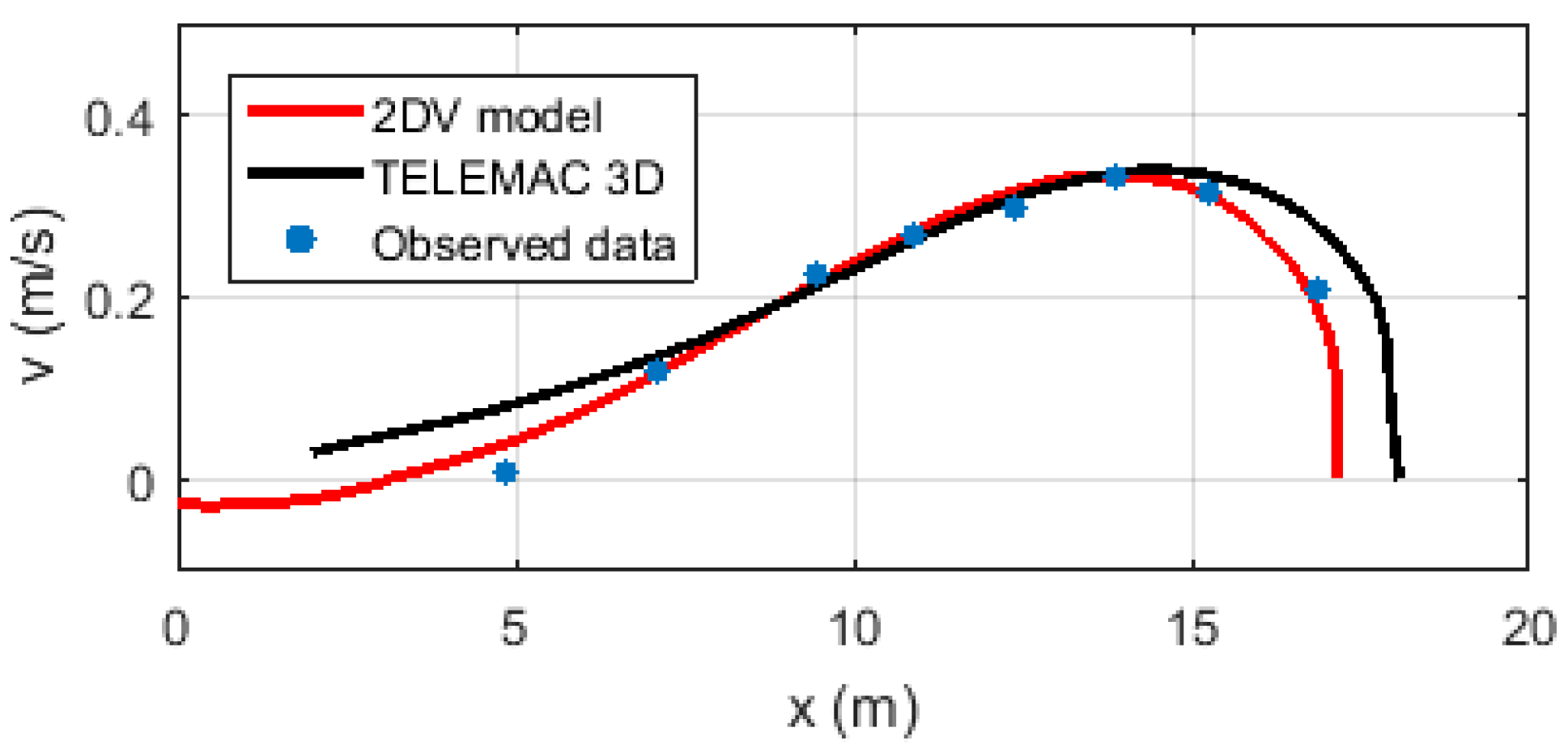
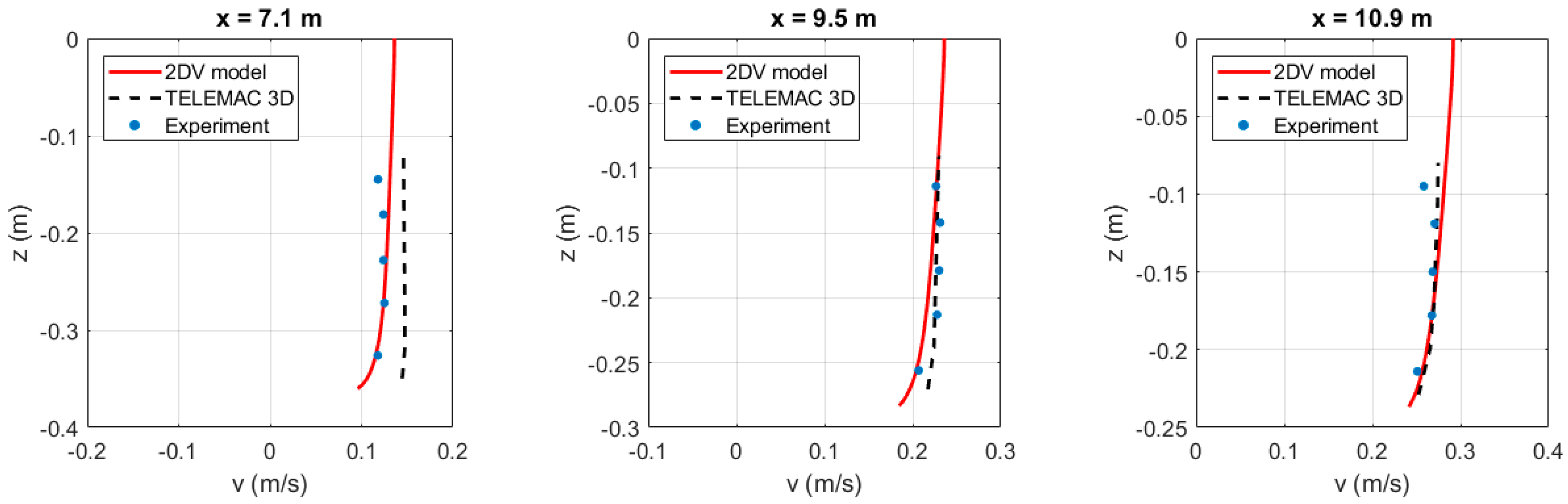
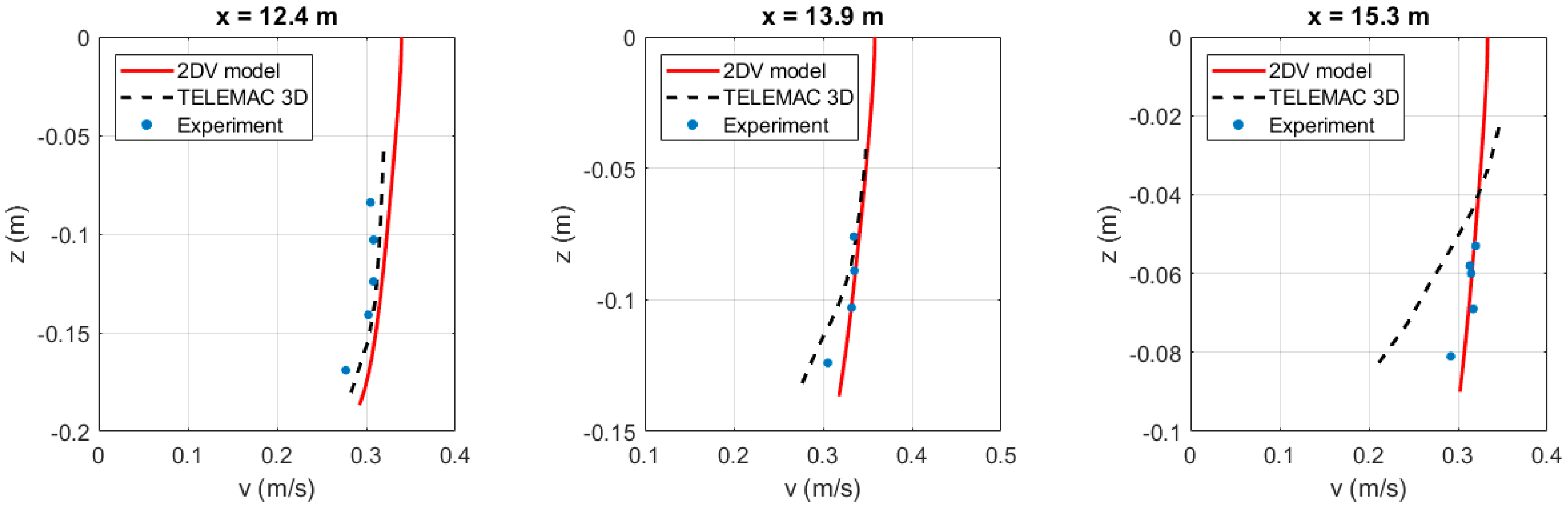
3.5. Breaking Waves Propagating in a Wave Flume
3.5.1. Bathymetry and the Wave Properties at the Boundary
3.5.2. Boundary Conditions
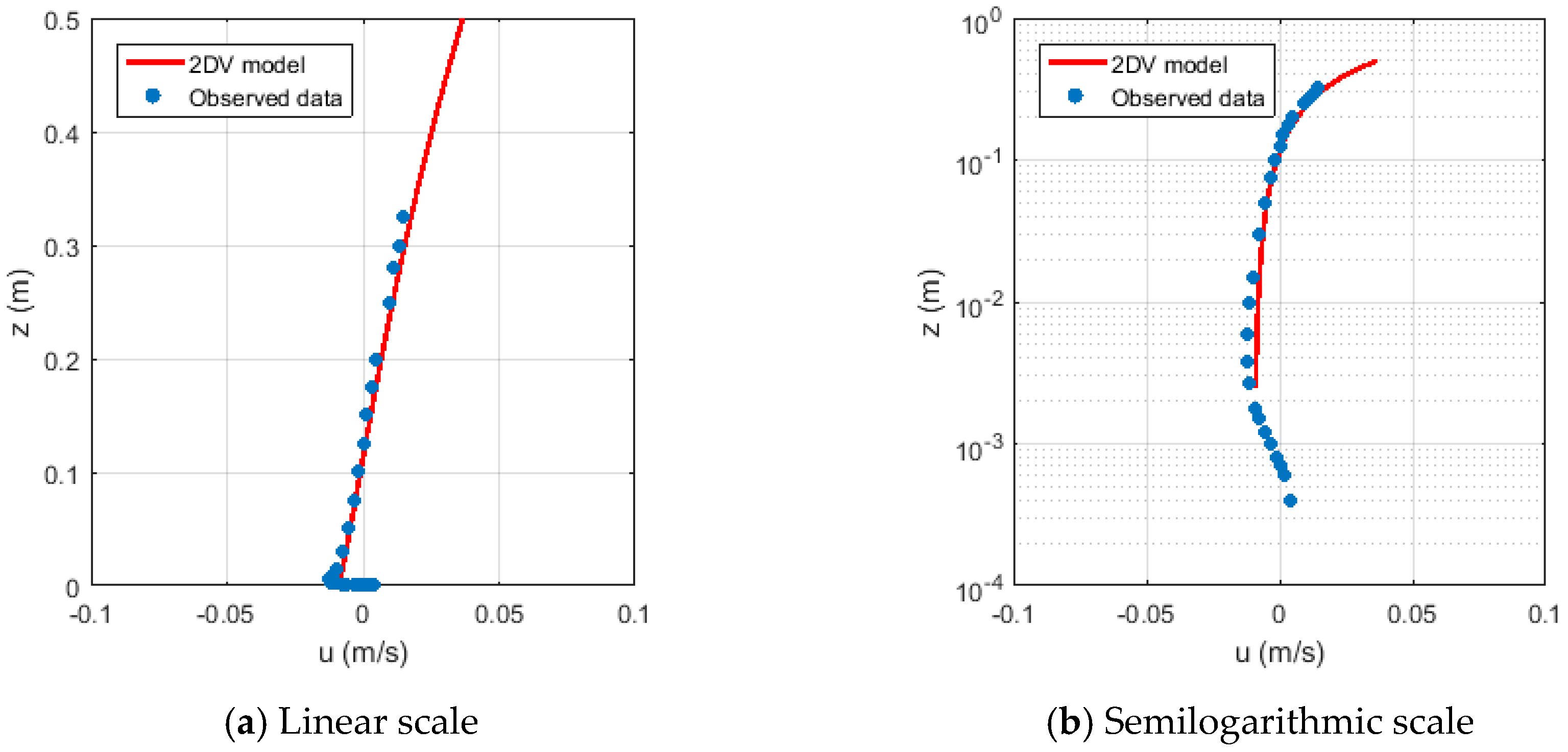
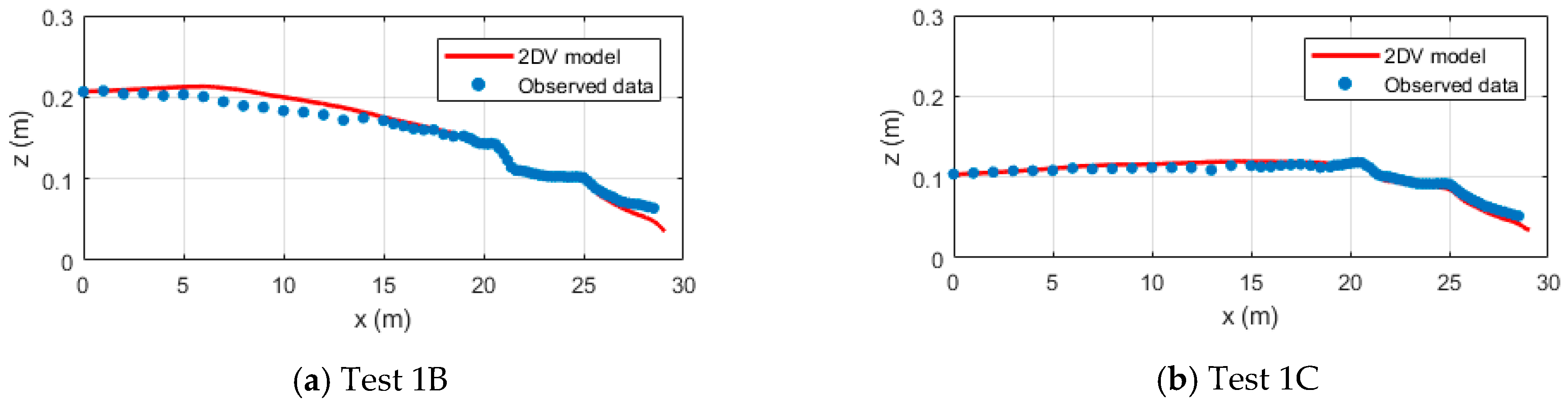
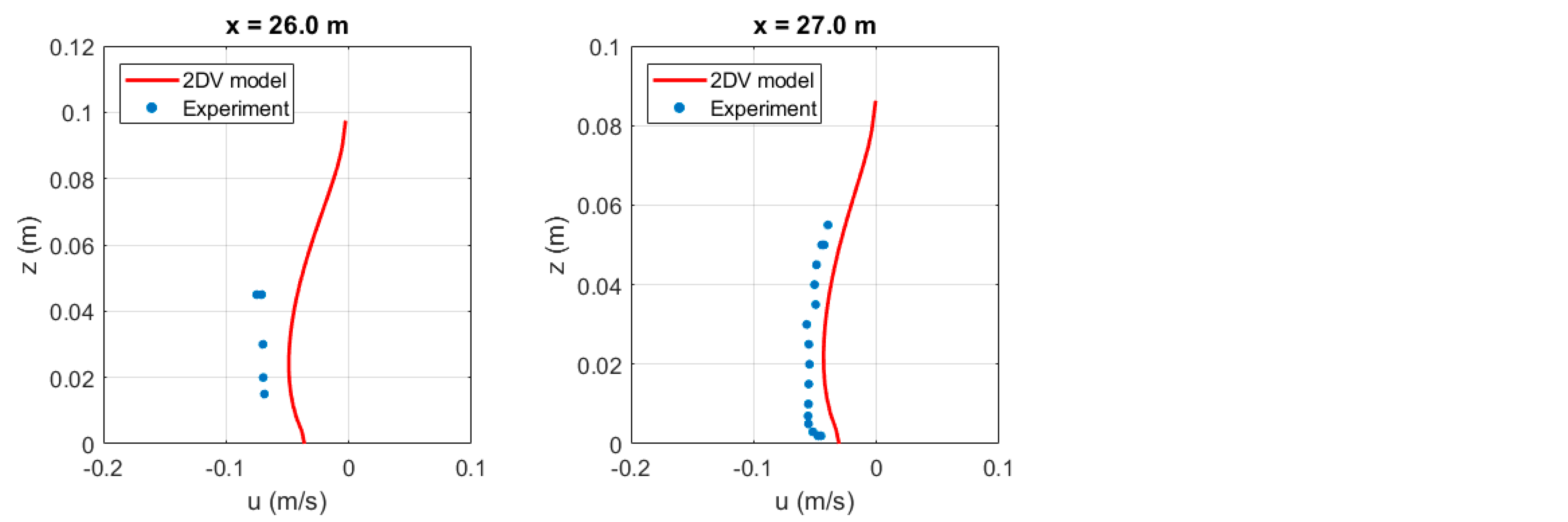
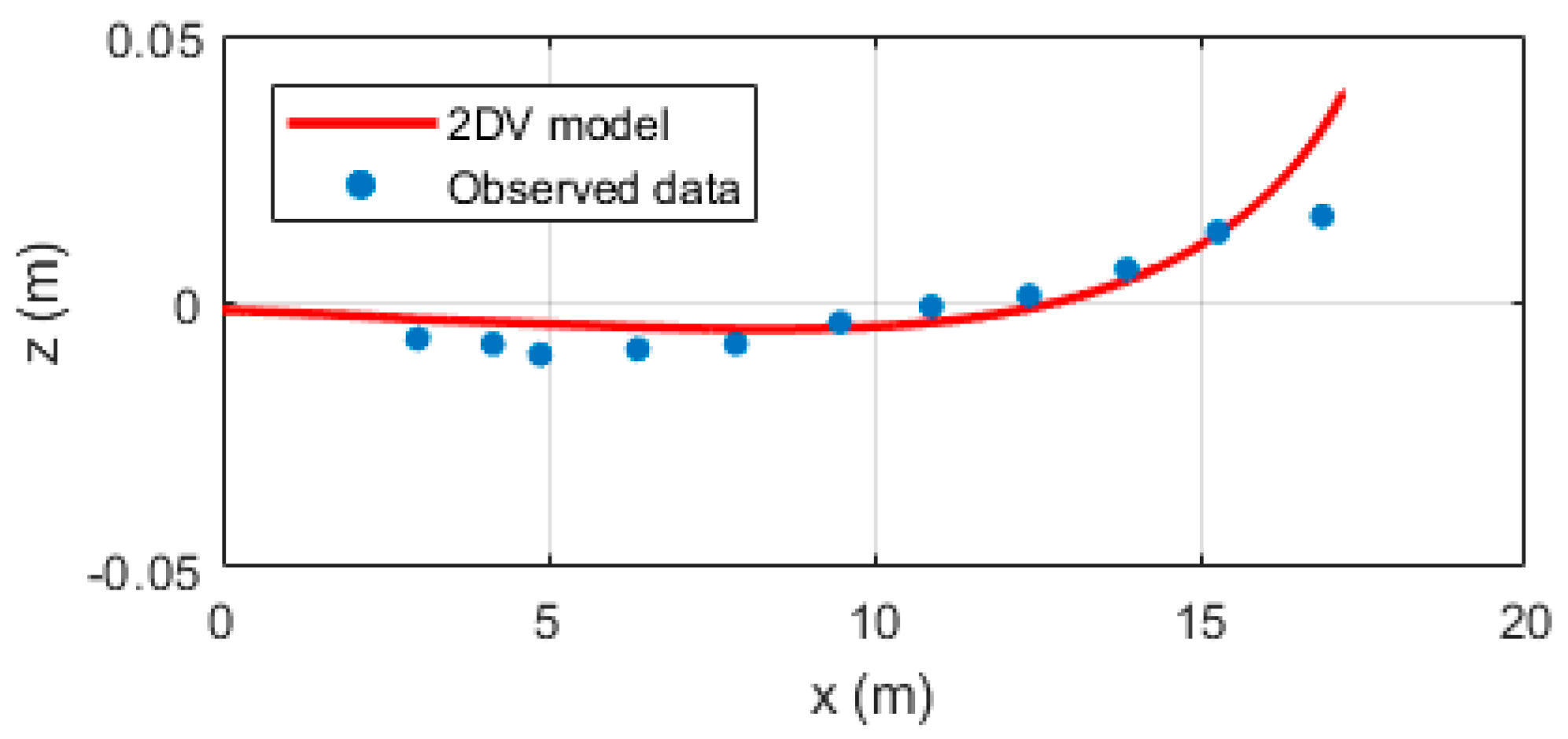
3.5.3. Model Validation
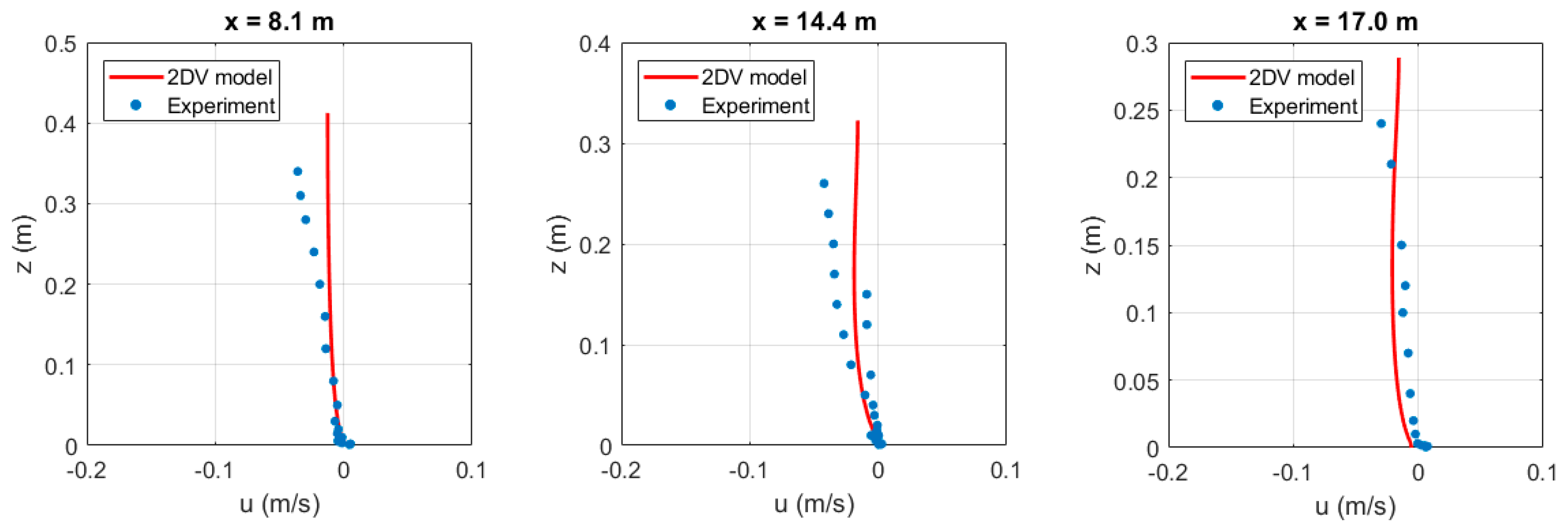
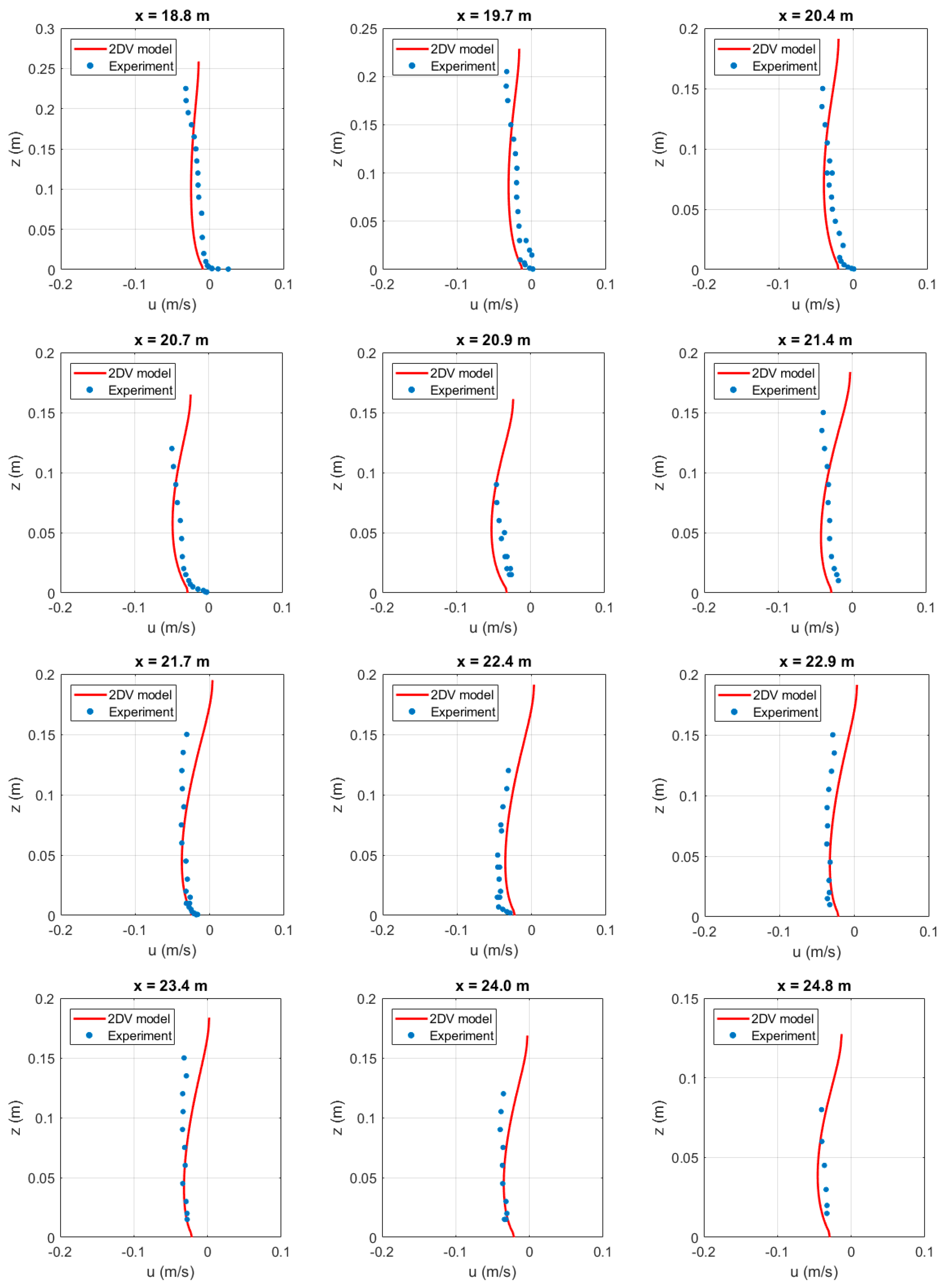
3.6. Breaking Waves Propagating in a Large-Scale Facility
3.6.1. Laboratory Setup and Boundary Conditions
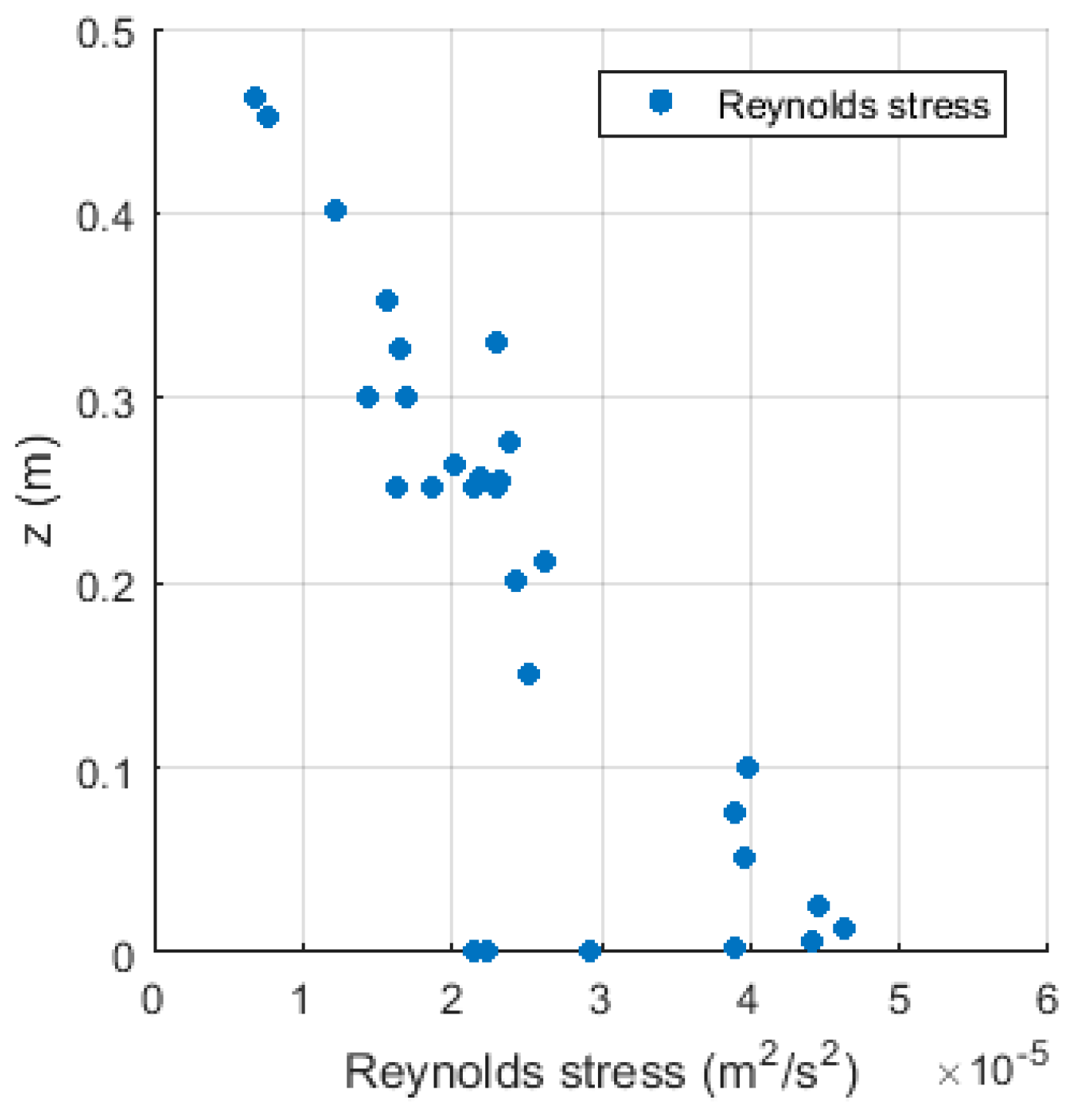
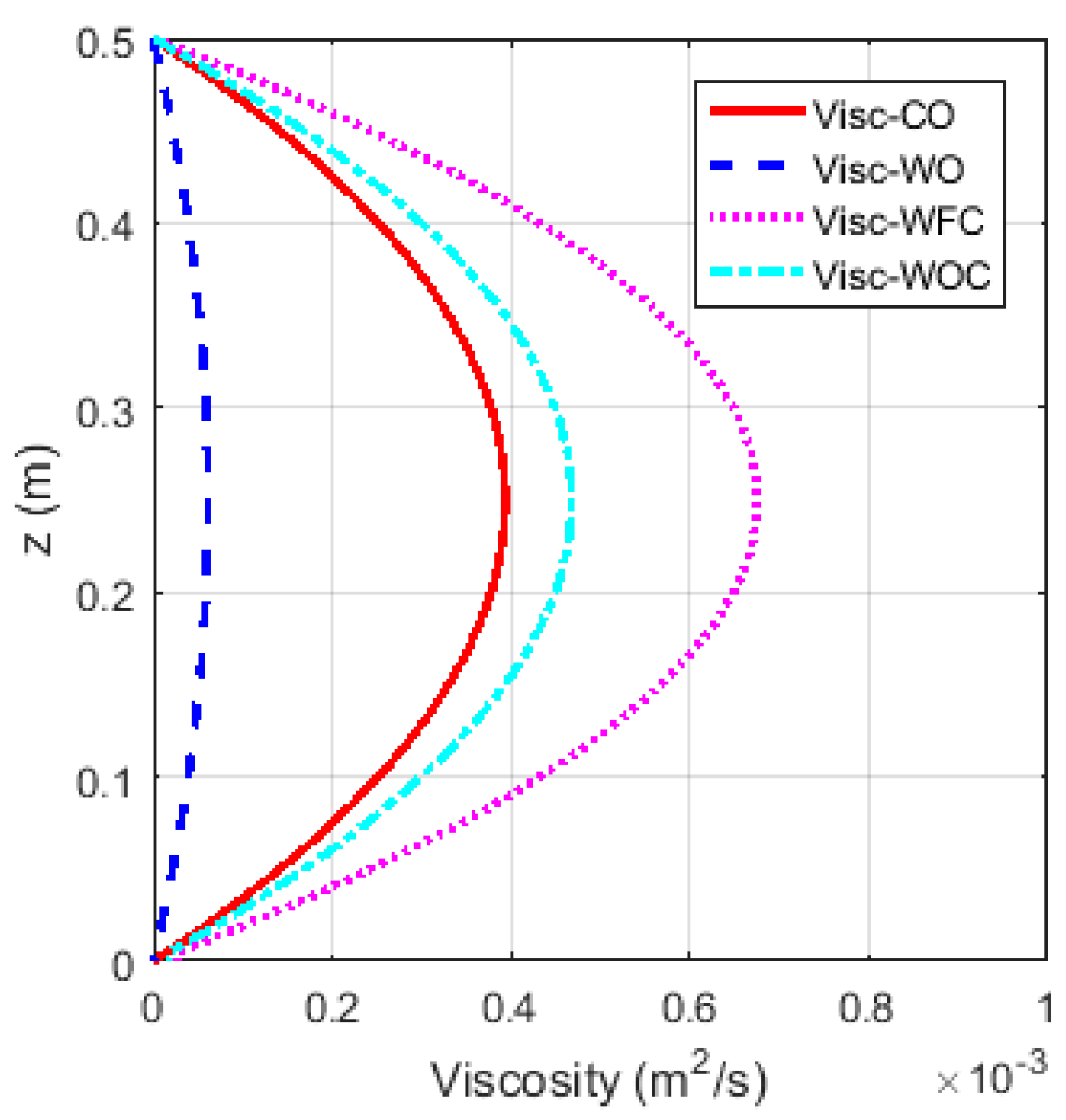
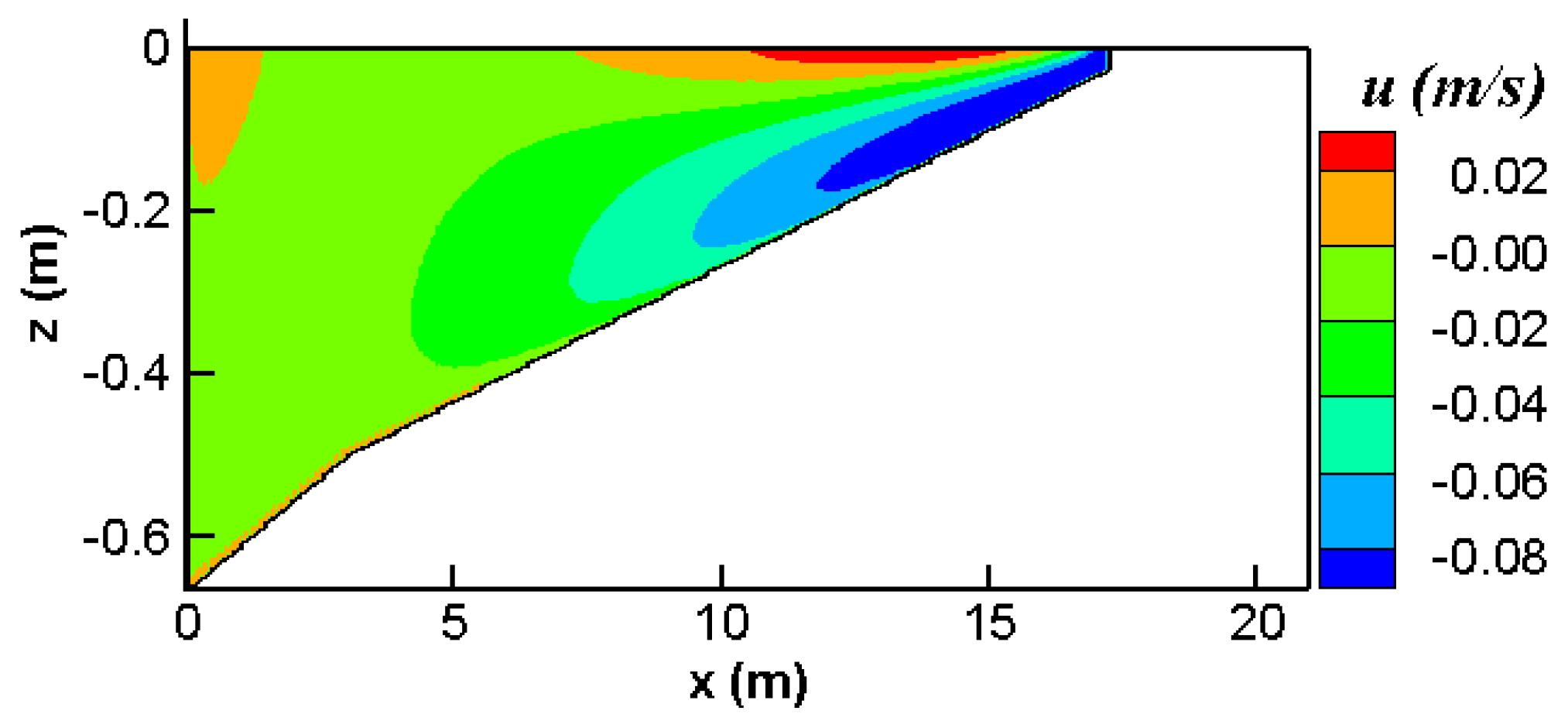
3.6.2. Numerical Results and Discussion
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the GLM Momentum Equation
Appendix B. Derivation of the Radiation Stress Tensor in the GLM Framework
References
- Longuet-Higgins, M.S.; Stewart, R.W. Changes in the form of short gravity waves on long waves and tidal currents. J. Fluid Mech. 1960, 8, 565–583. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R. Radiation stress and mass transport in gravity waves, with application to ‘surf beats’. J. Fluid Mech. 1962, 13, 481–504. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R. Radiation Stresses in Water Waves; A Physical Discussion, with Applications. In Deep Sea Research and Oceanographic Abstracts; Elsevier: Amsterdam, The Netherlands, 1964; pp. 529–562. Available online: https://0-www-sciencedirect-com.brum.beds.ac.uk/science/article/abs/pii/0011747164900014 (accessed on 10 January 2021).
- Longuet-Higgins, M.S. Longshore currents generated by obliquely incident sea waves: 1. J. Geophys. Res. 1970, 75, 6778–6789. [Google Scholar] [CrossRef]
- Bowen, A.J. The generation of longshore currents on a plane beach. J. Mar. Res. 1969, 27, 206–215. [Google Scholar]
- Thornton, E.B. Variation of longshore current across the suft zone. Coast. Eng. Proc. 1970, 1, 18. [Google Scholar] [CrossRef] [Green Version]
- Xie, L.; Wu, K.; Pietrafesa, L.; Zhang, C. A numerical study of wave-current interaction through surface and bottom stresses: Wind-driven circulation in the South Atlantic Bight under uniform winds. J. Geophys. Res. Oceans (1978–2012) 2001, 106, 16841–16855. [Google Scholar] [CrossRef] [Green Version]
- Xia, H.; Xia, Z.; Zhu, L. Vertical variation in radiation stress and wave-induced current. Coast. Eng. 2004, 51, 309–321. [Google Scholar] [CrossRef]
- Craik, A.; Leibovich, S. A rational model for Langmuir circulations. J. Fluid Mech. 1976, 73, 401–426. [Google Scholar] [CrossRef] [Green Version]
- Leibovich, S. On the evolution of the system of wind drift currents and Langmuir circulations in the ocean. Part 1. Theory and averaged current. J. Fluid Mech. 1977, 79, 715–743. [Google Scholar] [CrossRef]
- McWilliams, J.C.; Restrepo, J.M. The wave-driven ocean circulation. J. Phys. Oceanogr. 1999, 29, 2523–2540. [Google Scholar] [CrossRef]
- McWilliams, J.C.; Restrepo, J.M.; Lane, E.M. An asymptotic theory for the interaction of waves and currents in coastal waters. J. Fluid Mech. 2004, 511, 135–178. [Google Scholar] [CrossRef]
- Newberger, P.; Allen, J.S. Forcing a three-dimensional, hydrostatic, primitive-equation model for application in the surf zone: 1. Formulation. J. Geophys. Res. Ocean. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Uchiyama, Y.; McWilliams, J.C.; Shchepetkin, A.F. Wave–current interaction in an oceanic circulation model with a vortex-force formalism: Application to the surf zone. Ocean Model. 2010, 34, 16–35. [Google Scholar] [CrossRef]
- Kumar, N.; Voulgaris, G.; Warner, J.C.; Olabarrieta, M. Implementation of the vortex force formalism in the coupled ocean-atmosphere-wave-sediment transport (COAWST) modeling system for inner shelf and surf zone applications. Ocean Model. 2012, 47, 65–95. [Google Scholar] [CrossRef]
- Lane, E.M.; Restrepo, J.M.; McWilliams, J.C. Wave–current interaction: A comparison of radiation-stress and vortex-force representations. J. Phys. Oceanogr. 2007, 37, 1122–1141. [Google Scholar] [CrossRef] [Green Version]
- Mellor, G. The three-dimensional current and surface wave equations. J. Phys. Oceanogr. 2003, 33, 1978–1989. [Google Scholar] [CrossRef]
- Mellor, G.L. The depth-dependent current and wave interaction equations: A revision. J. Phys. Oceanogr. 2008, 38, 2587–2596. [Google Scholar] [CrossRef]
- Ardhuin, F.; Rascle, N.; Belibassakis, K.A. Explicit wave-averaged primitive equations using a generalized Lagrangian mean. Ocean Model. 2008, 20, 35–60. [Google Scholar] [CrossRef] [Green Version]
- Mellor, G. A combined derivation of the integrated and vertically resolved, coupled wave–current equations. J. Phys. Oceanogr. 2015, 45, 1453–1463. [Google Scholar] [CrossRef]
- Mellor, G. On theories dealing with the interaction of surface waves and ocean circulation. J. Geophys. Res. Ocean. 2016, 121, 4474–4486. [Google Scholar] [CrossRef]
- Ardhuin, F.; Suzuki, N.; McWilliams, J.C.; Aiki, H. Comments on “A Combined Derivation of the Integrated and Vertically Resolved, Coupled Wave–Current Equations”. J. Phys. Oceanogr. 2017, 47, 2377–2385. [Google Scholar] [CrossRef]
- Andrews, D.; McIntyre, M. An exact theory of nonlinear waves on a Lagrangian-mean flow. J. Fluid Mech. 1978, 89, 609–646. [Google Scholar] [CrossRef] [Green Version]
- Leibovich, S. On wave-current interaction theories of Langmuir circulations. J. Fluid Mech. 1980, 99, 715–724. [Google Scholar] [CrossRef] [Green Version]
- Dingemans, M.W. Water Wave Propagation over Uneven Bottoms: Linear Wave Propagation; World Scientific: Singapore, 1997; Volume 13. [Google Scholar]
- Groeneweg, J. Wave-Current Interactions in a Generalized Lagrangian Mean Formulation. Ph.D. Thesis, Delft University of Technology, Delft, The Netherland, 1999. [Google Scholar]
- Walstra, D.; Roelvink, J.; Groeneweg, J. Calculation of wave-driven currents in a 3D mean flow model. In Coastal Engineering 2000; 2001; pp. 1050–1063. Available online: https://ascelibrary.org/doi/abs/10.1061/40549(276)81 (accessed on 13 January 2021).
- Roelvink, J.; Reniers, A. A Guide to Modeling Coastal Morphology; World Scientific: Singapore, 2011; Volume 12. [Google Scholar]
- Deigaard, R.; Fredsøe, J. Shear stress distribution in dissipative water waves. Coast. Eng. 1989, 13, 357–378. [Google Scholar] [CrossRef]
- You, Z.-J. On the vertical distribution of< ũ> by FJ Rivero and AS Arcilla: Comments. Coast. Eng. 1997, 30, 305–310. [Google Scholar] [CrossRef]
- Supharatid, S.; Tanaka, H.; Shuto, N. Interactions of waves and current (Part I: Experimental investigation). Coast. Eng. Jpn. 1992, 35, 167–186. [Google Scholar] [CrossRef]
- Nielsen, P.; You, Z.-J. Eulerian mean velocities under non-breaking waves on horizontal bottoms. In Coastal Engineering 1996; 1997; pp. 4066–4078. Available online: https://ascelibrary.org/doi/abs/10.1061/9780784402429.314 (accessed on 10 January 2021).
- Ockenden, M.; Soulsby, R. Sediment Transport by Currents Plus Irregular Waves. 1994. Available online: https://eprints.hrwallingford.com/347/ (accessed on 13 January 2021).
- Soulsby, R. Dynamics of Marine Sands: A Manual for Practical Applications. Thomas Telford, 1997. Available online: https://www.infona.pl/resource/bwmeta1.element.elsevier-69102d77-8480-3ca9-adc0-a09c289eb654 (accessed on 13 January 2021).
- Van Rijn, L.C. Principles of Fluid Flow and Surface Waves in Rivers, Estuaries, Seas and Oceans; Aqua Publications: Amsterdam, The Netherlands, 2011; Available online: https://www.aquapublications.nl/Contentsbook1.pdf (accessed on 13 January 2021).
- Feddersen, F.; Guza, R.; Elgar, S.; Herbers, T. Velocity moments in alongshore bottom stress parameterizations. J. Geophys. Res. Ocean. 2000, 105, 8673–8686. [Google Scholar] [CrossRef]
- Longuet-Higgins, M. The mechanics of the surf zone. In Theoretical and Applied Mechanics; Springer: Berlin/Heidelberg, Germany, 1973; pp. 213–228. [Google Scholar] [CrossRef]
- Stelling, G.S.; Busnelli, M.M. Numerical simulation of the vertical structure of discontinuous flows. Int. J. Numer. Methods Fluids 2001, 37, 23–43. [Google Scholar] [CrossRef]
- Bennis, A.-C.; Ardhuin, F.; Dumas, F. On the coupling of wave and three-dimensional circulation models: Choice of theoretical framework, practical implementation and adiabatic tests. Ocean Model. 2011, 40, 260–272. [Google Scholar] [CrossRef] [Green Version]
- Belibassakis, K.; Athanassoulis, G. Extension of second-order Stokes theory to variable bathymetry. J. Fluid Mech. 2002, 464, 35–80. [Google Scholar] [CrossRef] [Green Version]
- Klopman, G. Vertical Structure of the Flow Due to Waves and Currents: Laser-Doppler Flow Measurements for Waves following or Opposing a Current. Delft Hydraulics, Report No. H840.32, Part 2. 1994. Available online: https://repository.tudelft.nl/islandora/object/uuid:181f5c9c-f66f-4103-abe6-c4633137e351 (accessed on 10 January 2021).
- Fredsøe, J.; Deigaard, R. Mechanics of Coastal Sediment Transport; World Scientific: Singapore, 1992; Volume 3. [Google Scholar]
- Boers, M. Surf Zone Turbulence. 2005. Available online: https://repository.tudelft.nl/islandora/object/uuid:71428ad5-0658-49f7-b83e-0deb26b668cf (accessed on 10 January 2021).
- Hamilton, D.G.; Ebersole, B.A. Establishing uniform longshore currents in a large-scale sediment transport facility. Coast. Eng. 2001, 42, 199–218. [Google Scholar] [CrossRef]
- Teles, M.J.; Pires-Silva, A.A.; Benoit, M. Three dimensional modelling of wave-current interactions in the coastal zone with a fully coupled system. Geography. 2013. Available online: https://www.researchgate.net/profile/Maria_Teles2/publication/315066486_THREE_DIMENSIONAL_MODELLING_OF_WAVE-CURRENT_INTERACTIONS_IN_THE_COASTAL_ZONE_WITH_A_FULLY_COUPLED_SYSTEM/links/58c9539f4585157512329679/THREE-DIMENSIONAL-MODELLING-OF-WAVE-CURRENT-INTERACTIONS-IN-THE-COASTAL-ZONE-WITH-A-FULLY-COUPLED-SYSTEM.pdf (accessed on 10 January 2021).









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Type | Tp (s) | Hrms (m) | h (m) |
|---|---|---|---|
| Random | 1.7 | 0.1 | 0.5 |
| Conditions | Formula (62) | Van Rijn [35] |
|---|---|---|
| CO | 0.1 | 0.1 |
| WO | 1.3 | 1.3 |
| WFC | 5.3 | 3.6 |
| WOC | 4.9 | 3.6 |
| Conditions | |||
|---|---|---|---|
| CO | 8.16 | 5.4 | 0.74 |
| WO | 0.9 | 0.21 | 0.13 |
| WFC | 8.10 | 37.67 | 1.94 |
| WOC | 5.86 | 24.6 | 1.56 |
| Experiment | Hs (m) | Tp (s) |
|---|---|---|
| Test 1B | 0.206 | 2.03 |
| Test 1C | 0.103 | 3.3.3 |
| Wave Type | Tp (s) | Hs (m) | h (m) | |
|---|---|---|---|---|
| Irregular | 2.5 | 0.225 | 10 | 0.667 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.T.; Jacobsen, N.G.; Roelvink, D. Development and Validation of Quasi-Eulerian Mean Three-Dimensional Equations of Motion Using the Generalized Lagrangian Mean Method. J. Mar. Sci. Eng. 2021, 9, 76. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9010076
Nguyen DT, Jacobsen NG, Roelvink D. Development and Validation of Quasi-Eulerian Mean Three-Dimensional Equations of Motion Using the Generalized Lagrangian Mean Method. Journal of Marine Science and Engineering. 2021; 9(1):76. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9010076
Chicago/Turabian StyleNguyen, Duoc Tan, Niels G. Jacobsen, and Dano Roelvink. 2021. "Development and Validation of Quasi-Eulerian Mean Three-Dimensional Equations of Motion Using the Generalized Lagrangian Mean Method" Journal of Marine Science and Engineering 9, no. 1: 76. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9010076