
Effects of Gap Resonance on the Hydrodynamics and Dynamics of a Multi-Module Floating System with Narrow Gaps


Abstract
:1. Introduction
2. Theoretical Background
3. Results and Discussions
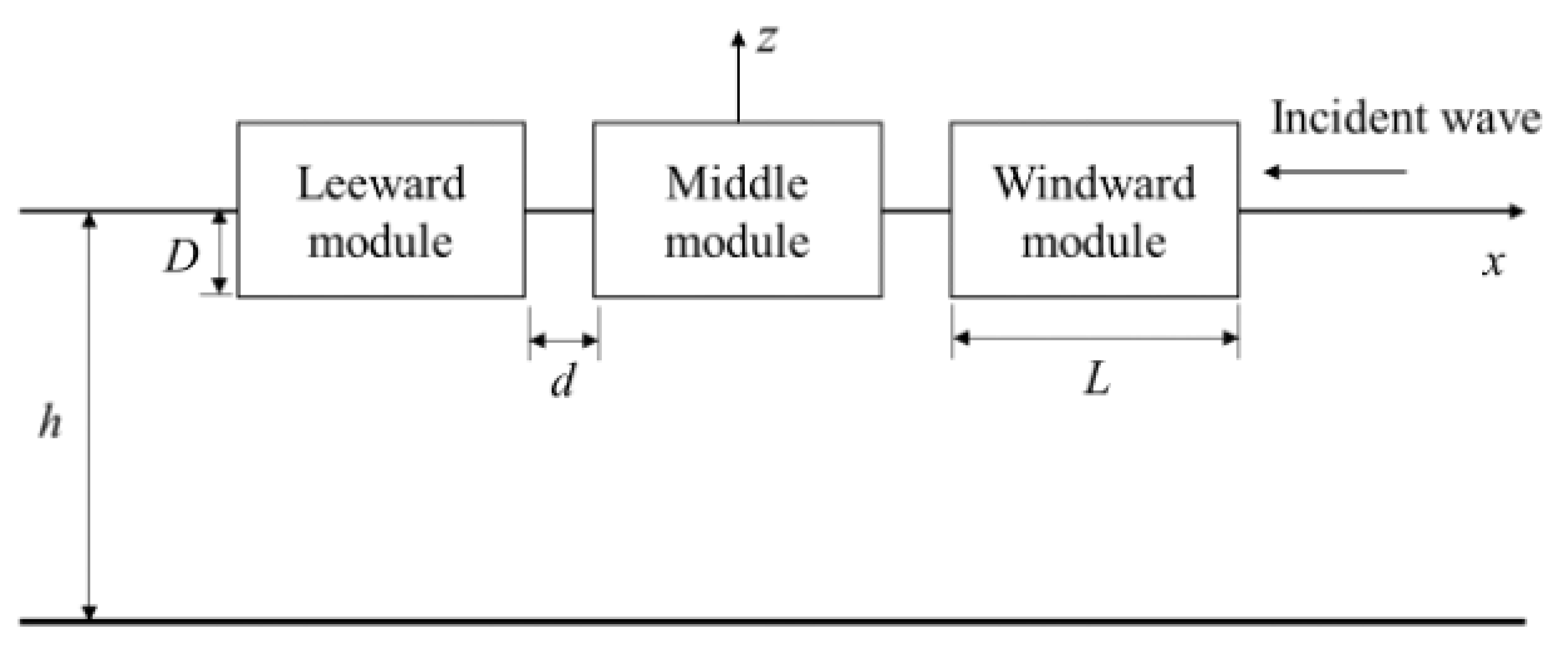
3.1. Particulars of the Analysed Multi-Module System
3.2. Frequency-Domain Simulations
3.3. Time-Domain Simulations
4. Conclusions
- (1)
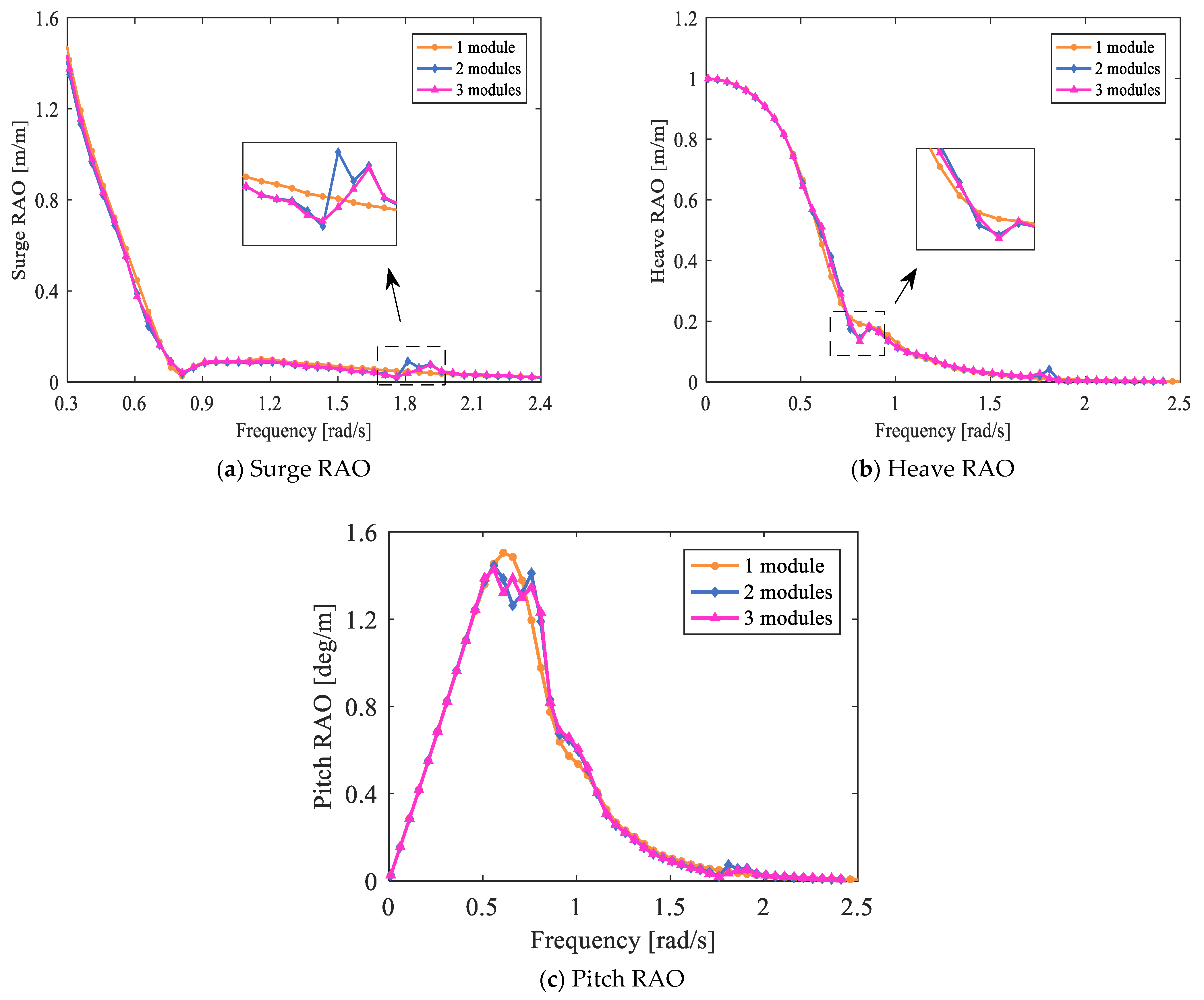
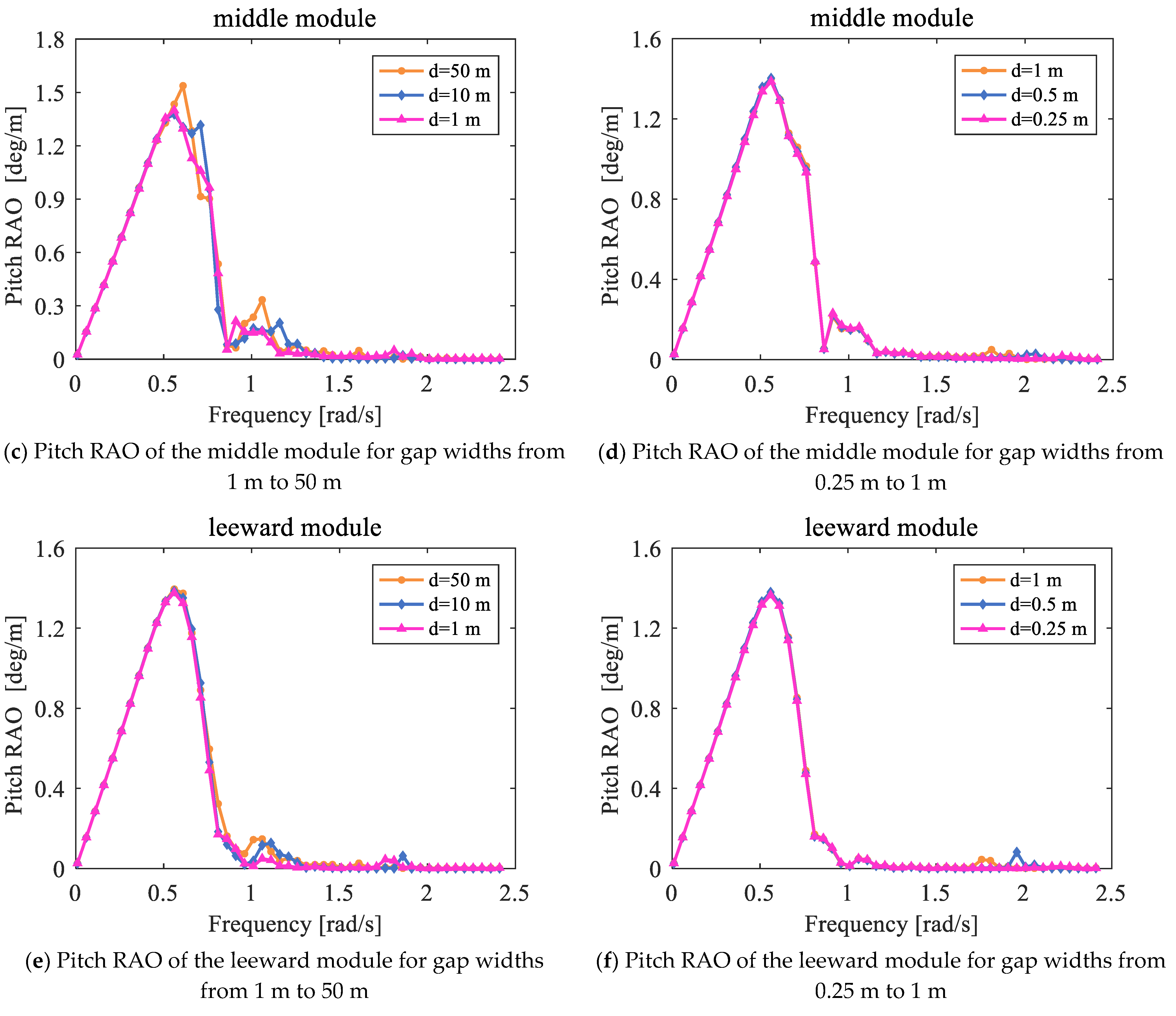
- The hydrodynamic interactions between multi-floaters are related to the gap width and the breadth of the module in the series form. With the further decrease of the gap spacing, “pumping mode” replaces “sloshing mode” as the resonance phenomenon in the gap, the water surface in the gap moves in a flat form and the resonance frequency increases continuously under the condition of the same water depth and draft. While the number of modules, by contrast, only affects the motion response in the direction of the pitch in a head sea and has no effect on the resonant frequency.
- (2)
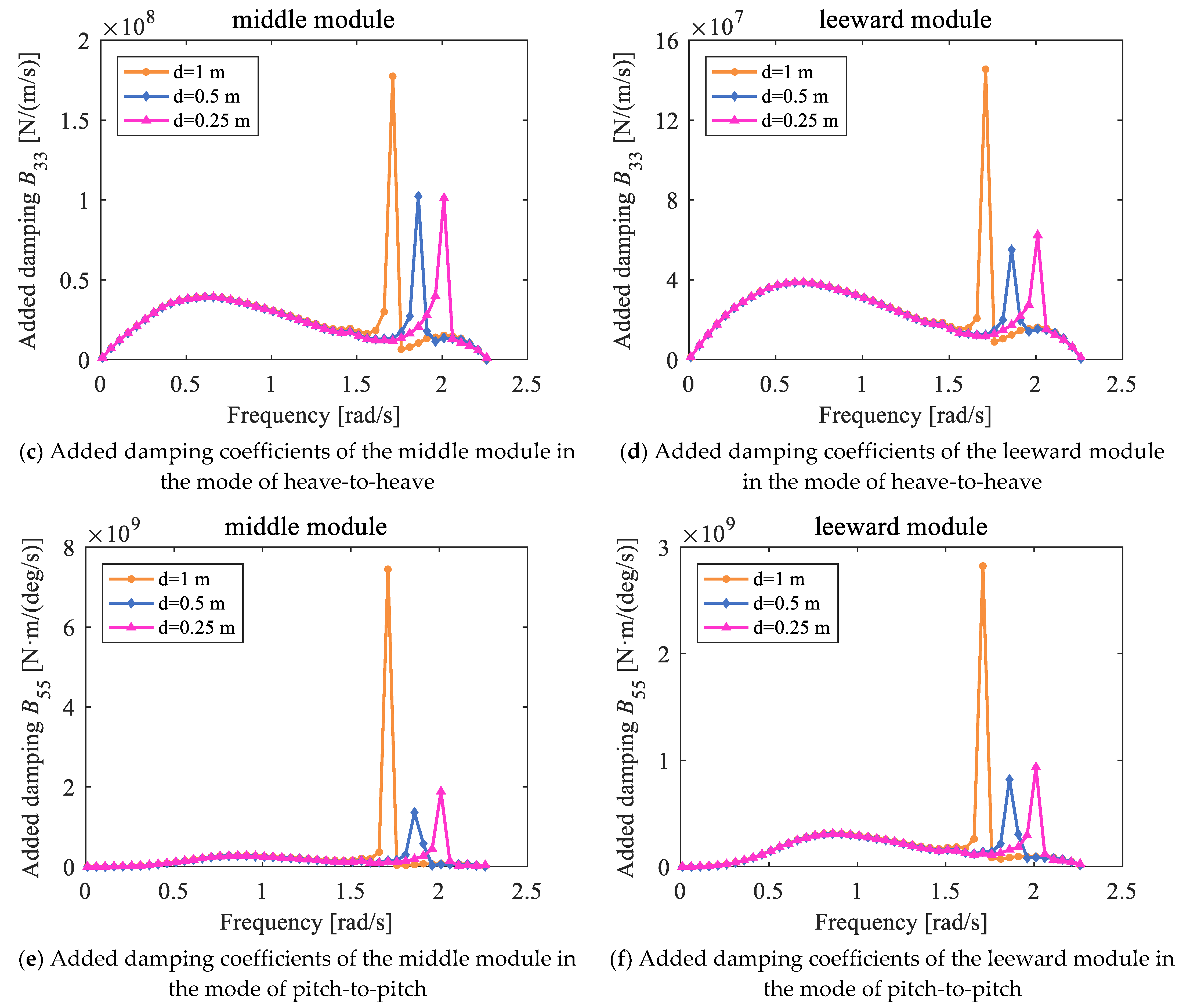
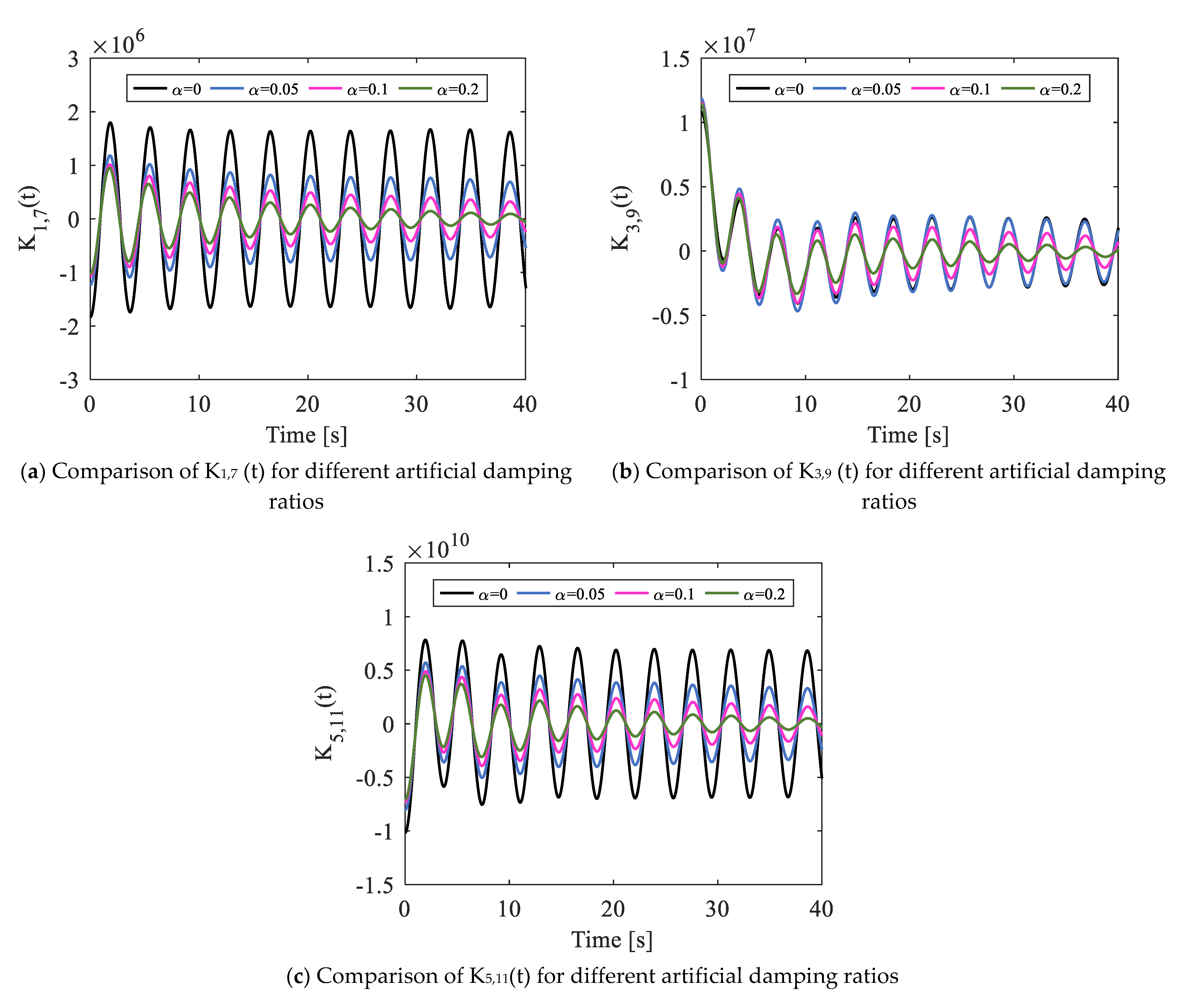
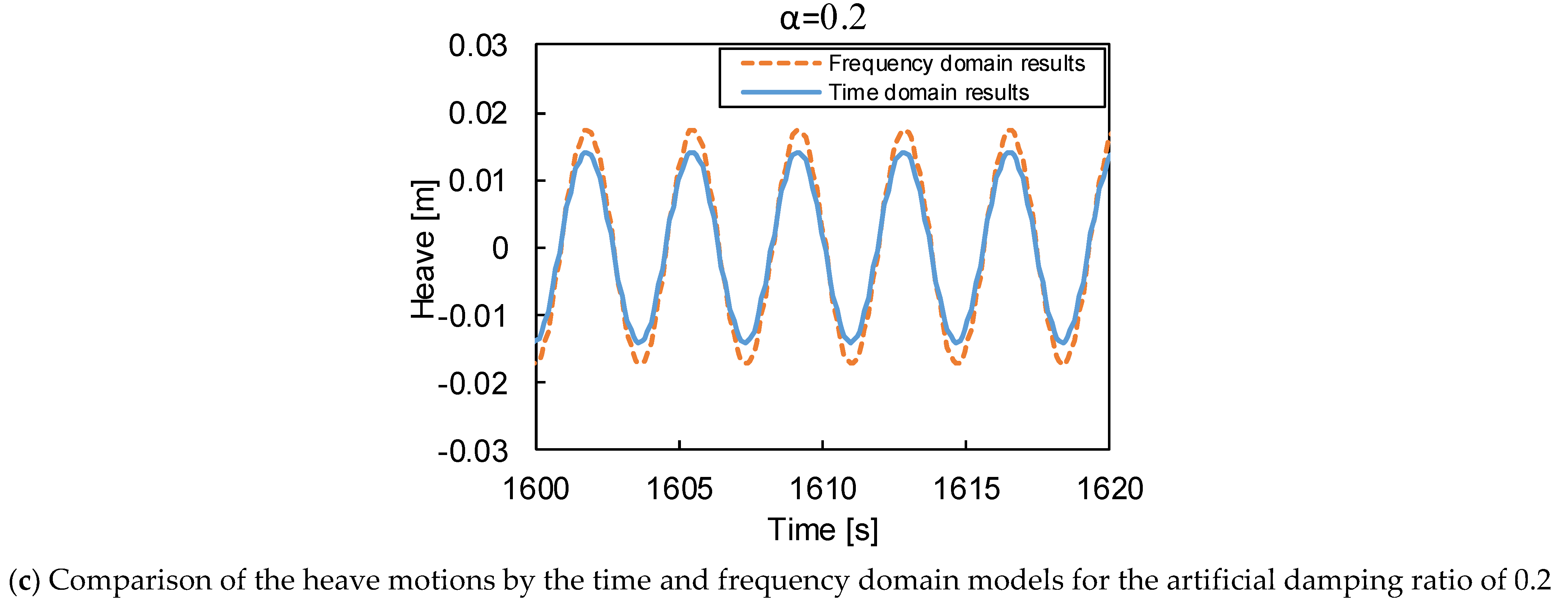
- The distorted hydrodynamic coefficients will further cause the impulse response functions in the time-domain equation to be lightly damped, which will lead to errors in calculating time-domain response, making the time-domain results do not agree with those in the frequency domain. Due to this effect, the time-domain model established built upon the frequency-domain results without considering viscosity correction is found to be un-converged.
- (3)
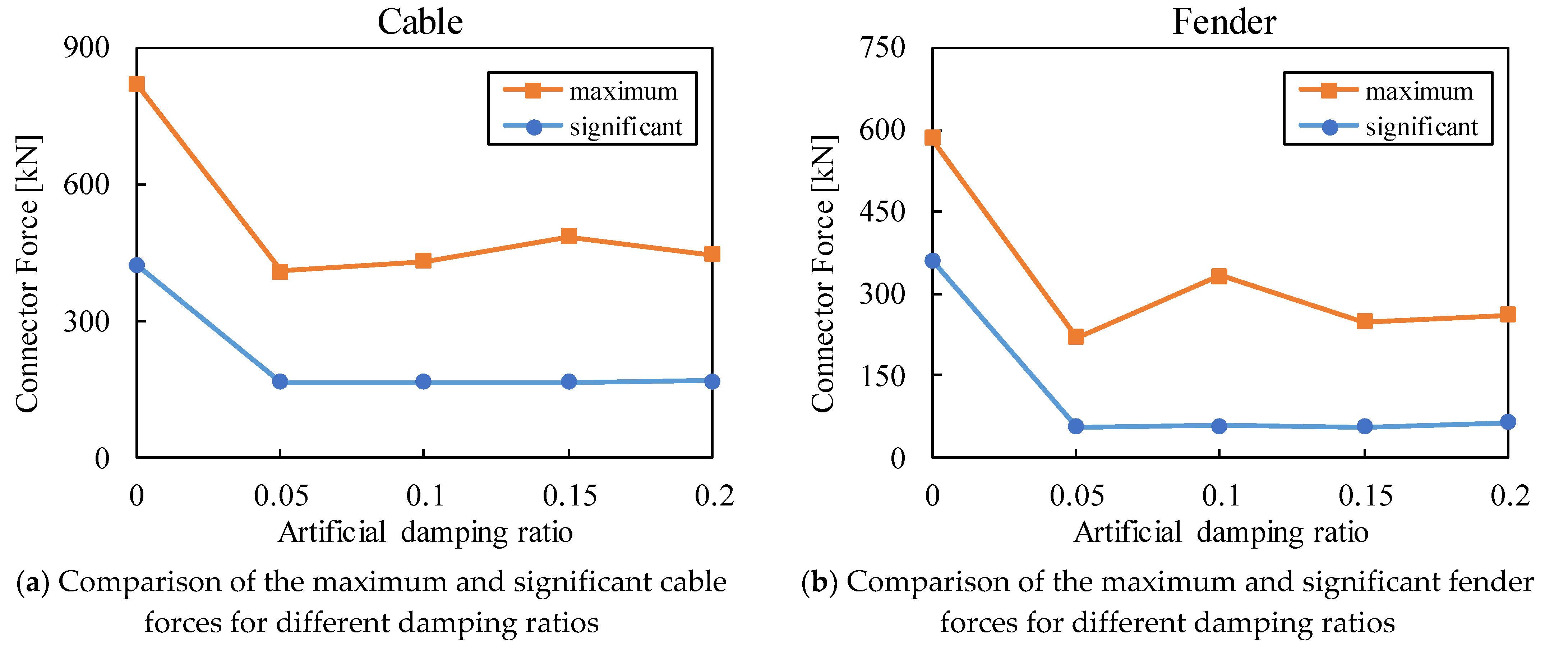
- Through the parametric analyses, it is found that the introduction of the artificial damping lid can effectively suppress the unrealistic resonant effects on the hydrodynamic coefficients and impulse response function. Thus, this method can improve the accuracy of both the frequency and time-domain simulations. Specifically, the sharp change of the hydrodynamic coefficients has been lessened by the introduction of the artificial damping lid, which can reduce the added damping coefficient by about 70% at the resonant frequency. This will contribute to the rapid attenuation of the impulse response functions and help to achieve converged time-domain results. Furthermore, this will help to reduce the over-estimated relative motions and connector loads at the resonant frequency based on the RMFC model. For the case of adding an artificial damping ratio of 0.2, the relative heave and pitch motions are found to be reduced by 33% and 50%, respectively. In addition, the maximum cable and fender forces are found to be reduced by 50%, compared with the case without viscosity correction. Nevertheless, there is no significant difference between different artificial damping values on the connector loads and relative motions between adjacent modules.
- (4)
- It is recommended that one should consider the introduction of artificial damping on the gap fluid to obtain more realistic and accurate time-domain simulations for a multi-module floating system with strong hydrodynamic interactions. This method may have potential applications in the design and dynamic simulation of multi-module floating systems such as the floating airport, floating artificial islands, and marine operations involving multiple ships.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tajali, Z.; Shafieefar, M. Hydrodynamic analysis of multi-body floating piers under wave action. Ocean Eng. 2011, 38, 1925–1933. [Google Scholar] [CrossRef]
- Mostofi, A.; Bargi, K. New concept in analysis of floating piers for ship berthing impact. Mar. Struct. 2012, 25, 58–70. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, D.; Lu, C.; Qi, E.; Hu, J.; Wu, Y. Amplitude death of a multi-module floating airport. Nonlinear Dyn. 2015, 79, 2385–2394. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, D.; Xia, S.; Wu, Y. A new concept for the stability design of floating airport with multiple modules. Procedia IUTAM 2017, 22, 221–228. [Google Scholar] [CrossRef]
- Zhao, W.; Yang, J.; Hu, Z. Hydrodynamic interaction between FLNG vessel and LNG carrier in side by side configuration. J. Hydrodyn. 2012, 24, 648–657. [Google Scholar] [CrossRef]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Time domain modelling of the wave induced dynamics of multiple structures in close proximity. In Proceedings of the 2nd Marine Operations Specialty Symposium, Singapore, 16–19 September 2016. [Google Scholar]
- Chen, M.; Zou, M.; Zhu, L. Frequency-domain response analysis of adjacent multiple floaters with flexible connections. J. Ship Mech. 2018, 22, 1164–1180. [Google Scholar]
- Kim, B.W.; Hong, S.Y.; Kyoung, J.H.; Cho, S.K.; Hong, S. Evaluation of bending moments and shear forces at unit connections of very large floating structures using hydroelastic and rigid body analyses. Ocean Eng. 2007, 34, 1668–1679. [Google Scholar] [CrossRef]
- Fu, S.; Moan, T.; Chen, X.; Cui, W. Hydroelastic analysis of flexible floating interconnected structures. Ocean Eng. 2007, 34, 1516–1531. [Google Scholar] [CrossRef]
- Gao, R.; Wang, C.; Koh, C. Reducing hydroelastic response of pontoon connector and gill cells. Eng. Struct. 2013, 52, 372–383. [Google Scholar] [CrossRef]
- Hong, S.Y.; Kim, J.H.; Cho, S.K.; Choi, Y.R.; Kim, Y.S. Numerical and experimental study on hydrodynamic interaction of side-by-side moored multiple vessels. In Proceedings of the Deepwater Mooring Systems: Concepts, Design, Analysis, and Materials, Houston, TX, USA, 2–3 October 2003; pp. 198–215. [Google Scholar]
- Abyn, H.; Islam, M.R.; Maimun, A.; Mahmoudi, A.; Kato, J. Experimental Study of Motions of Two Floating Offshore Structures in Waves. Brodogr. Teor. I Praksa Brodogr. I Pomor. Tehnike. 2016, 67, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Miao, G.; Ishida, H.; Saitoh, T. Influence of Gaps between Multiple Floating Bodies on Wave Forces. China Ocean Eng. 2000, 14, 407–422. [Google Scholar]
- McIver, P. Complex resonances in the water-wave problem for a floating structure. J. Fluid Mech. 2005, 536, 423–443. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, X.; Xu, S.; Wang, L.; Shang, Y. Numerical and Experimental Investigation of Hydrodynamic Interactions of Two VLFS Modules Deployed in Tandem. China Ocean Eng. 2020, 34, 46–55. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, C. Analysis of wave resonance in gap between two heaving barges. Ocean Eng. 2016, 117, 210–220. [Google Scholar] [CrossRef]
- Newman, J.N. Wave effects on multiple bodies. Hydrodyn. Ship Ocean Eng. 2001, 3, 3–26. [Google Scholar]
- Sun, L.; Taylor, R.E.; Taylor, P.H. First-and second-order analysis of resonant waves between adjacent barges. J. Fluid Struct. 2010, 26, 954–978. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Zou, M.; Chen, M.; Li, L. Nonlinear dynamic analysis of float-over deck installation for a GBS platform based on a constant parameter time domain model. Ocean Eng. 2021, 235, 109443. [Google Scholar] [CrossRef]
- Cummins, W.E.; Iiuhl, W.; Uinm, A. The Impulse Response Function and Ship Motions; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Lawson, M.; Yu, Y.H.; Nelessen, A.; Ruehl, K.; Michelen, C. Implementing nonlinear buoyancy and excitation forces in the wec-sim wave energy converter modeling tool. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 45547, p. V09BT09A043. [Google Scholar]
- Cha, J.H.; Ham, S.H.; Lee, K.Y.; Roh, M.I. Application of a topological modelling approach of multi-body system dynamics to simulation of multi-floating cranes in shipyards. Proc. Inst. Mech. Eng. Part K J. Multi Body Dyn. 2010, 224, 365–373. [Google Scholar] [CrossRef]
- Kara, F. Multibody Interactions of Floating Bodies with Time-Domain Predictions. J. Waterw. Port Coast. 2020, 146, 04020031. [Google Scholar] [CrossRef]
- Lewandowski, E.M. Multi-vessel seakeeping computations with linear potential theory. Ocean Eng. 2008, 35, 1121–1131. [Google Scholar] [CrossRef]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Time domain modeling of a dynamic impact oscillator under wave excitations. Ocean Eng. 2014, 76, 40–51. [Google Scholar] [CrossRef]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Investigation of the complex dynamics of float-over deck installation based on a coupled heave-roll-pitch impact model. Ocean Eng. 2017, 137, 262–275. [Google Scholar] [CrossRef]
- Feng, X.; Bai, W. Wave resonances in a narrow gap between two barges using fully nonlinear numerical simulation. Appl. Ocean Res. 2015, 50, 119–129. [Google Scholar] [CrossRef]
- Yang, M.; Teng, B.; Ning, D.; Shi, Z. Coupled dynamic analysis for wave interaction with a truss spar and its mooring line/riser system in time domain. Ocean Eng. 2012, 39, 72–87. [Google Scholar] [CrossRef]
- Koo, B.J.; Kim, M.H. Hydrodynamic interactions and relative motions of two floating platforms with mooring lines in side-by-side offloading operation. Appl. Ocean Res. 2005, 27, 292–310. [Google Scholar] [CrossRef]
- Huijsmans, R.H.M.; Pinkster, J.A.; De Wilde, J.J. Diffraction and radiation of waves around side-by-side moored vessels. In The Eleventh International Offshore and Polar Engineering Conference; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2001. [Google Scholar]
- Faitinsen, O.M. A numerical nonlinear method of sloshing in tanks with two-dimensional flow. J. Ship. Res. 1978, 22, 193–202. [Google Scholar] [CrossRef]
- Chen, X.B. Hydrodynamic analysis for offshore LNG terminals. In Proceedings of the 2nd International Workshop on Applied Offshore Hydrodynamics, Rio de Janeiro, Brazil, 14–15 April 2005. [Google Scholar]
- Yao, C.; Dong, W. Modeling of fluid resonance in-between two floating structures in close proximity. J. Zhejiang Univ. Sci. A 2015, 16, 987–1000. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Hu, Z.; Chen, G. An Investigation on Two-Dimensional Nonlinear Sloshing in Rectangular Tank. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2015; Volume 56475, p. V001T01A045. [Google Scholar]
- Zhao, D.; Hu, Z.; Zhou, K.; Chen, G.; Chen, X.; Feng, X. Coupled analysis of integrated dynamic responses of side-by-side offloading FLNG system. Ocean Eng. 2018, 168, 60–82. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Teng, B.; Cheng, L.; Sun, L.; Chen, X. Modelling of multi-bodies in close proximity under water waves—Fluid resonance in narrow gaps. Sci. China Phys. Mech. 2011, 54, 16–25. [Google Scholar] [CrossRef]
- Wang, S.; Wahab, R. Heaving oscillations of twin cylinders in a free surface. J. Ship Res. 1971, 15, 33–48. [Google Scholar]
- Newman, J.N. Application of generalized modes for the simulation of free surface patches in multi body hydrodynamics. In Proceedings of the 4th Annual WAMIT Consortium Report, Woods Hole, MA, USA; 2003; pp. 33–69. [Google Scholar]
- Moradi, N.; Zhou, T.; Cheng, L. Effect of inlet configuration on wave resonance in the narrow gap of two fixed bodies in close proximity. Ocean Eng. 2015, 103, 88–102. [Google Scholar] [CrossRef]
- ANSYS. AQWA Theory Manual; ANSYS, Inc.: Canonsburg, PA, USA, 2013. [Google Scholar]
- Ogilvie, T.F. Recent Progress toward the Understanding and Prediction of Ship Motions. In Proceedings of the 5th ONR Symp. on Naval Hydrodynamics, Japan. 1964. Available online: https://ci.nii.ac.jp/naid/20000327176/ (accessed on 9 November 2021).
- Kristiansen, E.; Hjulstad, Å.; Egeland, O. State-space representation of radiation forces in time-domain vessel models. Ocean Eng. 2005, 32, 2195–2216. [Google Scholar] [CrossRef]
- Greenhow, M. High-and low-frequency asymptotic consequences of the Kramers-Kronig relations. J. Eng. Math. 1986, 20, 293–306. [Google Scholar] [CrossRef]
- Cheetham, P.; Du, S.; May, R.; Smith, S. Hydrodynamic analysis of ships side by side in waves. In Proceedings of the International Aerospace CFD Conference, Paris, France, 18–19 June 2007. [Google Scholar]
- Xu, X.; Yang, J.; Li, X.; Xu, L. Time-domain simulation for coupled motions of three barges moored side-by-side in float-over operation. China Ocean Eng. 2015, 29, 155–168. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module Characteristic | Value |
|---|---|
| Length (m) | 100 |
| Breadth (m) | 50 |
| Depth (m) | 5 |
| Centre of gravity above base, KG (m) | 2.5 |
| Draught (m) | 2 |
| Radius of roll gyration, Rxx (m) | 14.5 |
| Radius of pitch gyration, Ryy (m) | 28.9 |
| Radius of yaw gyration, Rzz (m) | 32.27 |
| Gap Width(m) | ω Calculated by Equation (5) | ω Calculated in AQWA |
|---|---|---|
| 1 | 1.79 | 1.71 |
| 0.5 | 1.97 | 1.86 |
| 0.25 | 2.08 | 2.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Guo, H.; Wang, R.; Tao, R.; Cheng, N. Effects of Gap Resonance on the Hydrodynamics and Dynamics of a Multi-Module Floating System with Narrow Gaps. J. Mar. Sci. Eng. 2021, 9, 1256. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9111256
Chen M, Guo H, Wang R, Tao R, Cheng N. Effects of Gap Resonance on the Hydrodynamics and Dynamics of a Multi-Module Floating System with Narrow Gaps. Journal of Marine Science and Engineering. 2021; 9(11):1256. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9111256
Chicago/Turabian StyleChen, Mingsheng, Hongrui Guo, Rong Wang, Ran Tao, and Ning Cheng. 2021. "Effects of Gap Resonance on the Hydrodynamics and Dynamics of a Multi-Module Floating System with Narrow Gaps" Journal of Marine Science and Engineering 9, no. 11: 1256. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9111256