
Capture Power Prediction of the Frustum of a Cone Shaped Floating Body Based on BP Neural Network


1
Institute of Marine Science and Technology, Shandong University, Qingdao 266200, China
2
School of Mechanical Engineering, Shandong University, Jinan 250061, China
3
Key Laboratory of High Efficiency and Clean Mechanical Manufacture, Ministry of Education, Jinan 250061, China
*
Author to whom correspondence should be addressed.
J. Mar. Sci. Eng. 2021, 9(6), 656; https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9060656
Submission received: 7 May 2021
/
Revised: 6 June 2021
/
Accepted: 10 June 2021
/
Published: 13 June 2021
(This article belongs to the Topic Marine Renewable Energy)
Abstract
:How to improve the power generation of wave energy converters (WEC) has become one of the main research objectives in wave energy field. This paper illustrates a framework on the use of back propagation (BP) neural network in predicting capture power of the frustum of a cone shaped floating body. Mathematical model of single floating body is derived, and radius, semi-vertical angle, mass, submergence depth, power take-off (PTO) damping coefficient, and stiffness coefficient are identified as key variables. Commercial software ANSYS-AQWA is used for numerical simulations to obtain hydrodynamic parameters, and then capture power is calculated by these parameters. A database containing 100 samples is established by Latin hypercube sampling (LHS) method, and a simple feature study is conducted. A BP neural network model with high accuracy is designed and trained for predictions based on built database. The results show that forecasting results and desired outputs are in great agreement with error percentage not greater than 4%, correlation coefficient (CC) greater than 0.9, P value close to 1, and root mean square error (RMSE) less than 139 W. The proposed method provides a guideline for designers to identify basic parameters of the floating body and system damping coefficient.
1. Introduction
Wave energy converters (WEC), a new type of energy extractor with little pollution, are expected to be a reliable alternative to the current generation method. There are two stages for an oscillating body WEC transforming wave energy into other forms of energy like electricity. A floating body is firstly required to capture the wave energy induced by a wave’s motion. Then the moving floating body drives a generator to generate power. An intact oscillating body WEC system is generally composed of a moving floating body, a power take-off (PTO) system, and an anchor chain, etc. At present, the conversion efficiency of WECs is relatively low, so the main research objective is to improve the power generation of a specific device.
One method is to design a different floating body’s shape, and the shape is usually irregular curved surface. McCabe [1] researched the optimization of the shape of a wave energy collector to improve energy extraction by genetic algorithms, and a benchmark collector shape was identified. Colby [2] used evolutionary algorithms to optimize the ballast geometry and achieved 84% improvement in power output. Fang [3] designed a mass-adjustable float, and a new optimization calculation method was proposed. Multi-freedom buoys have been also proposed in [4,5,6]. They can translate or rotate in more than one freedom, so more wave energy can be captured. Another means is to design an innovative PTO system. Reabroy [7] proposed a novel floating device integrated with a fixed breakwater. The simulations and experiments proved that installing a breakwater can greatly improve the conversion efficiency. Liang [8] designed a novel PTO system which is inside the buoy with a mechanical motion rectifier (MMR). This mechanism can convert the bidirectional wave motion into unidirectional rotation of the generator by two one-way bearings. Li [9] improved this device by substituting one-way bearings for two one-way clutches. Chen [10] proposed a new point-absorber WEC with an outer-floater and a built-in power take-off mechanism. Besides, array-type WECs, integrated with many buoys and PTO systems, are also researched to achieve large scale power generation. The typical one is WaveNET [11], developed by Albatern in Scotland. Sun [12] proposed an array-type energy-capturing mechanism integrated with marine structures. Liu [13] proposed an array-type WEC combined with oscillating buoy.
The factors that affect the power generation have also been studied recently. Zou [14] analyzed the effects of spring force, mass force, and damping force on energy conversion efficiency based on a 3D wave tank model. Yu [15] and Wu [16] discussed the influence of the floating body’s shape, PTO damping coefficient, system stiffness coefficient, and geometry parameters on power generation. Zheng [17] established an optimization model of energy conversion performance via genetic algorithm. Ma [18] researched the two-body floating point absorber and the results showed that stiffness coefficient had less effect on the power generation than damping coefficient. Ji [19] proved that PTO damping coefficient and submerged body volume were the most important parameters that affect the output power, and that the significant wave height had little influence on conversion efficiency. Tongphong [20] analyzed the effects of wave frequency, PTO damping coefficient, and structure form (floating or fixed) on capture factors.
Wave load and hydrodynamic parameters are vital factors in the analysis process of floating body’s motions. Numerical simulations are widely used in hydrodynamic performance analysis to obtain these parameters. Ma [21] used ANSYS-AQWA software to assess the hydrodynamic performance and energy conversion of a pitching float WEC and analyzed key factors’ influences on the performance. Amiri [22] presented a numerical simulation scheme for a point wave absorber and analyzed its performance. Yu [23] applied Reynolds-Averaged Navier-Stokes (RANS) computational method for analyzing the hydrodynamic heave response of a specific WEC device.
In addition to the traditional physical model [24,25], novel methods and models based on big data and machine learning have also been presented. Law [26] carried out wave prediction over a large distance downstream using artificial neural network, introducing machine learning algorithm into ocean engineering. Desouky [27] utilized non-linear autoregressive with exogenous input network to predict the surface elevation with the help of an ahead located sensor. Kumar [28] used the Minimal Resource Allocation Network (MRAN) and the Growing and Pruning Radial Basis Function (GAP-RBF) network to predict the daily wave heights based on real marine data. Some elevating measurements are also proposed to assess the performance of predictions in [29]. Avila [30] combined Fuzzy Inference Systems (FIS) and Artificial Neural Networks (ANN) to forecast wave energy in Canary Islands. Wang [31] predicted power outputs of a WEC in shallow water, taking bottom effects into accounts. Halliday [32] utilized Fast Fourier Transform (FFT) to predict wave behavior in short term based on real marine data. Davis [33] used a nonlinear Extended Kalman Filter to estimate the wave excitation force based on experimental wave tank data. Ni [34] combined the Long Short-Term Memory (LSTM) algorithm and the principal component analysis (PCA) together to predict the power generation of a WEC.
Different from traditional mathematical model, this paper presents an agent model using BP neural network to determine the complex non-linear reflection between design variables and power generation. Power predictions are the foundation of multi-objective optimizations of a floating body. Accurate power prediction can provide a guide for the electricity consumption, allocation, and distribution in power grid. Through the prediction, the unknown generation power becomes measurable, so reasonable manners can be arranged to increase the grid capacity.
The remainder of this paper is organized as follows: Section 2 develops the mathematical model of the oscillating float-type WEC. In Section 3, a sample database is established by LHS method, and a simple feature study is conducted. The geometric model and simulations of each sample are done in ANSYS-AQWA (developed by ANSYS company, based in Canonsburg, Pennsylvania, USA) in Section 4. Section 5 designs a BP neural network model and it is used to predict the capture power. Results and discussion are given in Section 6 and conclusions are presented in Section 7.
2. Mathematical Model
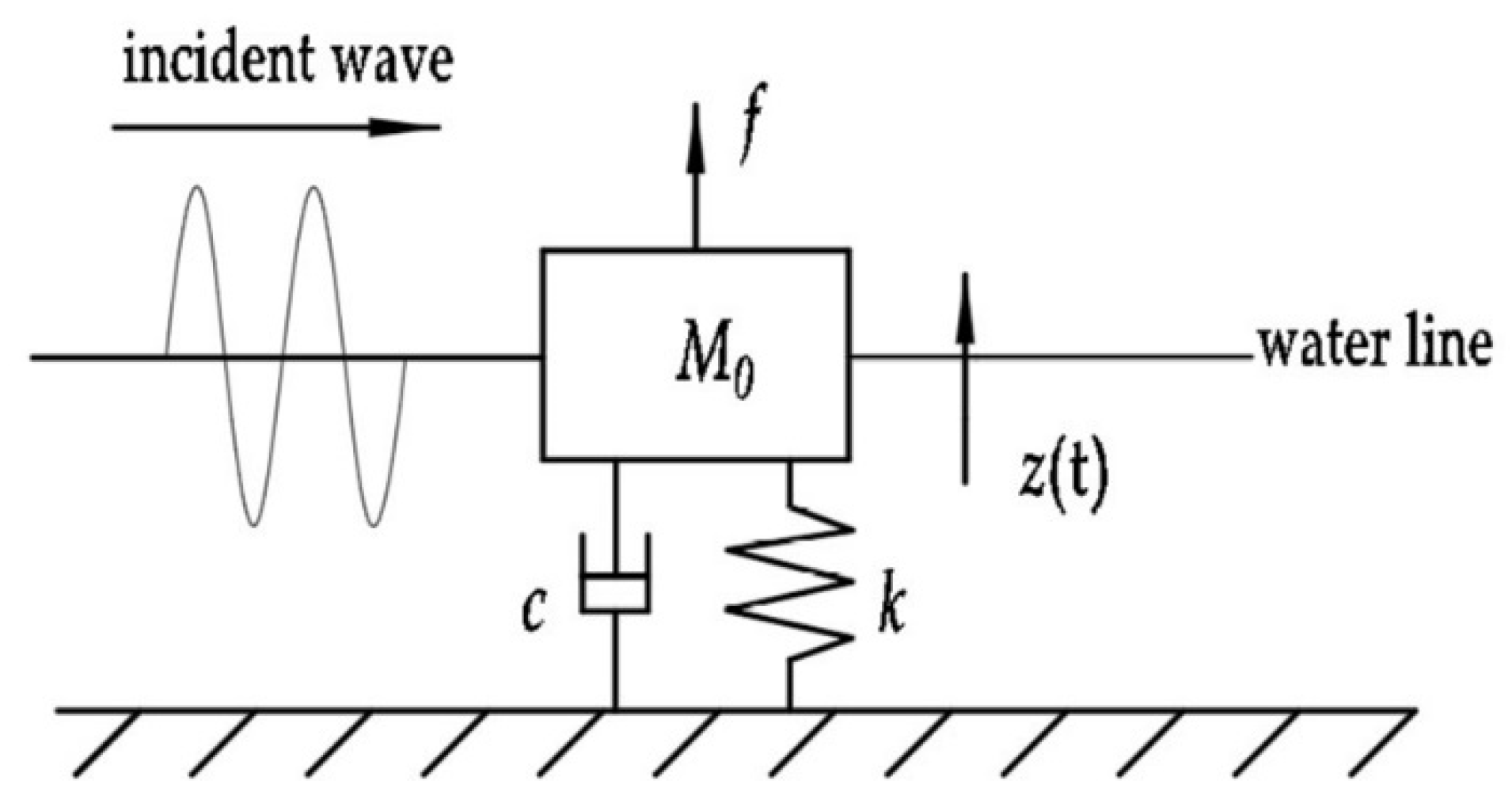
A schematic diagram of the oscillating body WEC is shown in Figure 1. To simplify the study, some assumptions are made as below:
- linear wave theory and potential flow theory are suitable for this model, and they are used to describe wave motion;
- only the heave motion of the floating body is considered;
- the viscous force and mooring force acting on the floating body are ignored [10];
- the PTO system is linear.
Under three assumptions, the following forces act on the floating body: hydrodynamic forces (excitation and radiation force); hydrostatic buoyancy; PTO damping force; rigid restoring force. According to the theory of fluid mechanics and Newton’s law, the governing equation of the floating body can be expressed as follows:
where M0 represents mass; z(t) represents the heave displacement; fE represents excitation force; fR represents radiation force; fS represents hydrostatic buoyancy; fPTO represents PTO damping force; fK represents rigid restoring force.
The excitation force imparts on the floating body by the incoming wave. It is the summation of the Froude-Krylov force fFK and the diffraction force fD, so it can be written as follows:
The radiation force is induced by the floating body’s motion and can be decomposed into an added mass term and a radiation damping term [25], so it can be expressed as follows:
where AM and BC are the added mass and radiation damping in the vertical direction, respectively.
The hydrostatic buoyancy, induced by seawater static pressure, is the resultant force of gravity and buoyancy. It is a force that restores the structure to hydrostatic equilibrium and is linear with the heave displacement of the floating body. It can be written as:
where ρ is seawater density; g is acceleration of gravity; AW is water cross area of the floating body. In this paper, the value of PTO damping is relatively large, and the heave displacement of the floating body is small. As a result, it is assumed that the water cross area of the floating body does not change. It is the section where the water line is located when the floating body is in still water. Therefore, the hydrostatic buoyancy can be expressed as:
where D is the diameter of the floating body.
The energy conversion system can be simplified to a linear spring damping system, so the PTO damping force is
where c is the damping coefficient of the PTO system.
The rigid restoring force is proportional to the heave displacement, and it can be written as follows:
where k is stiffness coefficient.
Reformulate Equation (1) through Equations (2), (3), (5)–(7):
Apply Fourier transform to Equation (8) and obtain another governing equation in the frequency domain. It is
where ω is the wave frequency; j is imaginary unit; Z(ω) and FE(ω) are functions of displacement and excitation force in the frequency domain, respectively.
In the frequency domain, the excitation force can be expressed by the product of the unit excitation force and the incident wave amplitude [35]. It is
Equation (9) can be rewritten as follows:
Formula (11) is a typical damped and forced vibration equation, so the natural frequency and damping factor can be expressed as below:
From Equations (12) and (13), the natural frequency and damping factor of a given WEC change over added mass and added damping.
According to Equation (11), the heave response in the frequency domain is
The average power in one wave period, captured by the floating body with heave motion, can be written as the product of damping force and vertical velocity. The work done by damping force is the energy absorbed by the floating body, so the mean capture power is
The mean capture power reaches the maximum when the following conditions are met.
This stiffness and damping are called the best stiffness and the best damping, respectively. When Bc > 0, the natural frequency, damping factor, and displacement are
The max capture power is
3. Design of Experiments (DOE) Method
3.1. Latin Hypercube Sampling
The sampling method is of great importance in experimental design. A good sampling method can result in more reasonable sample distribution, leading to a better model with higher accuracy. In this paper, a Latin hypercube sampling (LHS) method is utilized to generate sample points. Different from random sampling, LHS has a high efficiency of space filling by maximizing the stratification of each edge distribution, which improves the uniformity.
According to Equation (15), the factors that determine the capture power under given wave conditions are PTO damping coefficient c, system stiffness coefficient k, wave exciting force FE, float mass m, added mass AM, and added damping BC. Added mass, added damping, and wave exciting force are related to the geometry and submergence depth of the floating body. The geometric features of the floating body depend on radius R, semi-vertical angle α, and mass m. As a result, four main geometric parameters, including radius R, semi-vertical angle α, mass m, and submergence depth d, plus two system parameters, PTO damping coefficient c and stiffness coefficient k, are selected as key variables that affect the capture power.
The sample space of six key variables are defined as follows:
A database covering 100 sample points is established (see in Appendix A) and scatter diagrams of these samples are shown in Figure 2.
In Figure 2, each variable fills the whole sample space and the standard deviation of the value is small. It can reflect the relationship between the factor and the response in the six spaces.
3.2. Feature Study
Suitable feature study on the data set can give an insight to the correlation between the inputs and output. Pearson correlation analysis is conducted in this section to identify the correlation between six key variables and the capture power. Figure 3 shows the correlation coefficients in different wave situations. In this heatmap, a negative value means a negative correlation, and a positive value means a positive correlation. A large absolute value means a strong correlation.
In general, radius, submergence depth, and damping show a strong correlation, while semi-vertical angle, mass, and stiffness behave a weak correlation. Besides, the correlation is different at different wave frequency. When the wave frequency is 0.53 and 0.81 rad/s, semi-vertical angle shows a negative correlation, while a positive correlation comes up at other frequencies. The similar situation happens on stiffness. Mass and damping behave a positive correlation, while radius and submergence depth show a negative correlation all the time.
4. Numerical Simulations
4.1. Simulation Scheme
The structural schematic of the cone shaped floating body investigated in this study is shown in Figure 4.
The height of the cylinder part above the waterline is a constant, 0.5 m. In ANSYS Design Modeler, the 3D geometry with given parameters is created.
In this paper, ANSYS-AQWA, a commercial computation software based on potential flow theory, is utilized to calculate hydrodynamic parameters. The simulation process, including numerical modeling, parameters setting, mesh generation, and data post-processing, can be conducted in the graphical interface directly. The basic simulation steps for each sample are as follows:
- The moment of inertia and center of mass of the floating body are calculated in Static Structural module;
- Set solution environment in hydrodynamic diffusion module. The water line is at z = 0, the seawater depth is 200 m, and the surface area are 100 m × 100 m. Details of the point mass, additional damping, and additional hydrostatic stiffness are set according to the results obtained in Static Structural module and parameters in Table A1. In this study, the considered wave range is from 0 to 0.4 Hz, meaning that the wave circular frequency within 2.5 rad/s needs to be simulated. Therefore, the defeaturing tolerance and maximum element size are 0.5 m and 1 m, respectively. The maximum allowed wave frequency is 0.61 Hz in this scheme;
- Solve the model in the frequency domain and obtain Diffraction and Froude-Krylov force Fe, added mass AM, and radiation damping BC.
For each simulation, the given frequency range is divided into 52 frequency points. The mean power for each sample at each frequency is calculated. The results of sample 1 and sample 2 are shown in Figure 5.
With the increase in wave frequency, the capture power rises firstly and then drops steadily. For each sample, there is a unique optimal frequency in which the capture power can reach the maximum. The 100 samples’ capture power are calculated so that they can be used as training set and test set for BP neutral network. Only two samples’ results are presented in this figure.
4.2. Theoretical Verification of Simulations
Falnes [36] illustrated that the maximum power that a heaving axisymmetric body can absorb is
where J is the wave energy flux; λ is the wavelength. For deep-water waves, λ = g/2π. J is
where T and H are wave period and height, respectively. Budal’s upper bound [36] gave another upper limit power that a submerged body with given volume V can absorb. It is
where V is the volume of the submerged part. The point of intersection of two theoretical curves can be defined as (Tc, Pc). Pc is
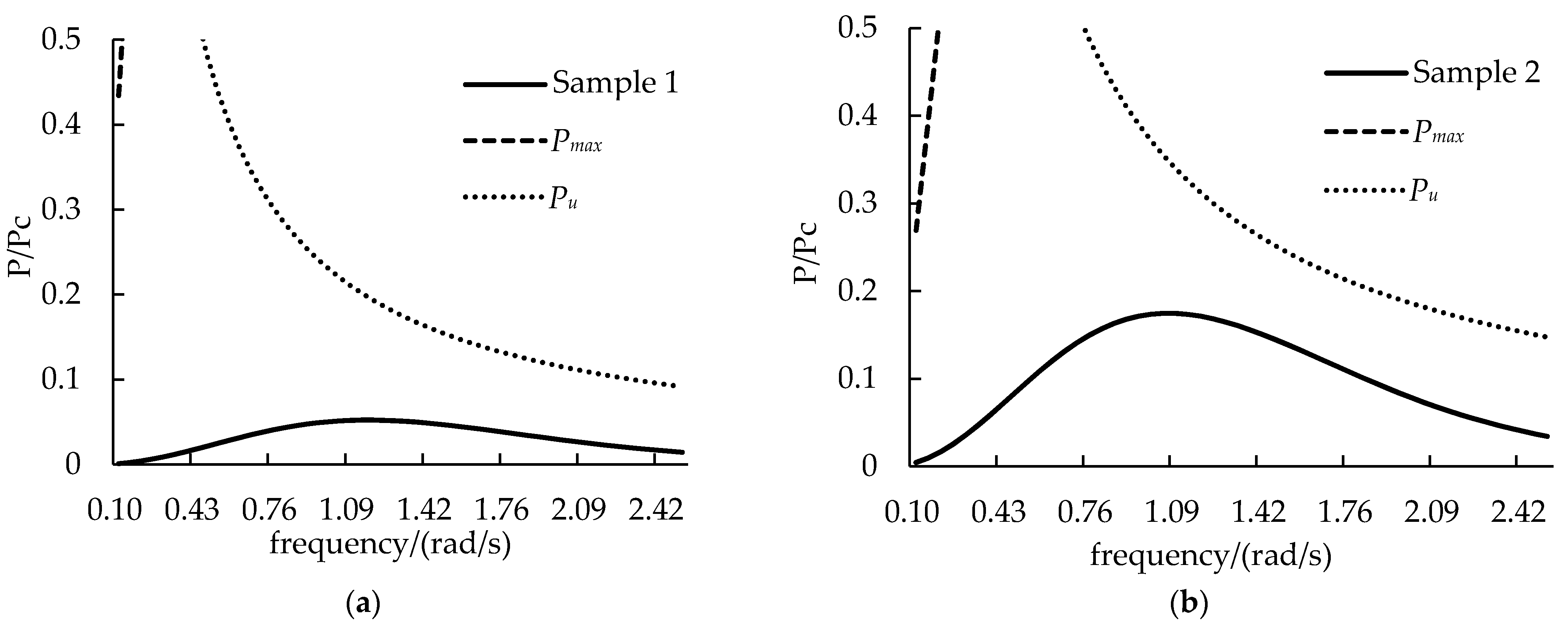
In this study, Equations (23) and (25) are used to verify the validity of simulations. To make comparisons, the results are normalized by dividing Pc. The three curves are shown in Figure 6.
It can be found that the capture power curves of two samples are in the area enclosed by curve Pmax, curve Pu, and coordinate axes, which means the simulation scheme is accurate and reliable. All the samples are verified successfully and only two of them are demonstrated in this section.
5. BP Neural Network
The back propagation (BP) neural network is a kind of feedforward neural network trained by error back propagation algorithm. It is a most widely used form, and is composed of many nonlinear transformation units. This algorithm has a strong non-linear mapping ability and can simulate any nonlinear continuous functions with much higher accuracy theoretically. After the network is trained, the reflection between the inputs and outputs can be obtained and memorized. They are shown on the weights of each layer. BP neural network’s structure is flexible, which means the number of layers and neurons can be changed according to research objectives. A BP neural network generally includes an input layer, one or two hidden layers, and an output layer. Full connections are applied between layers. More details about BP neural network can be seen in [37].
5.1. Neural Network Design
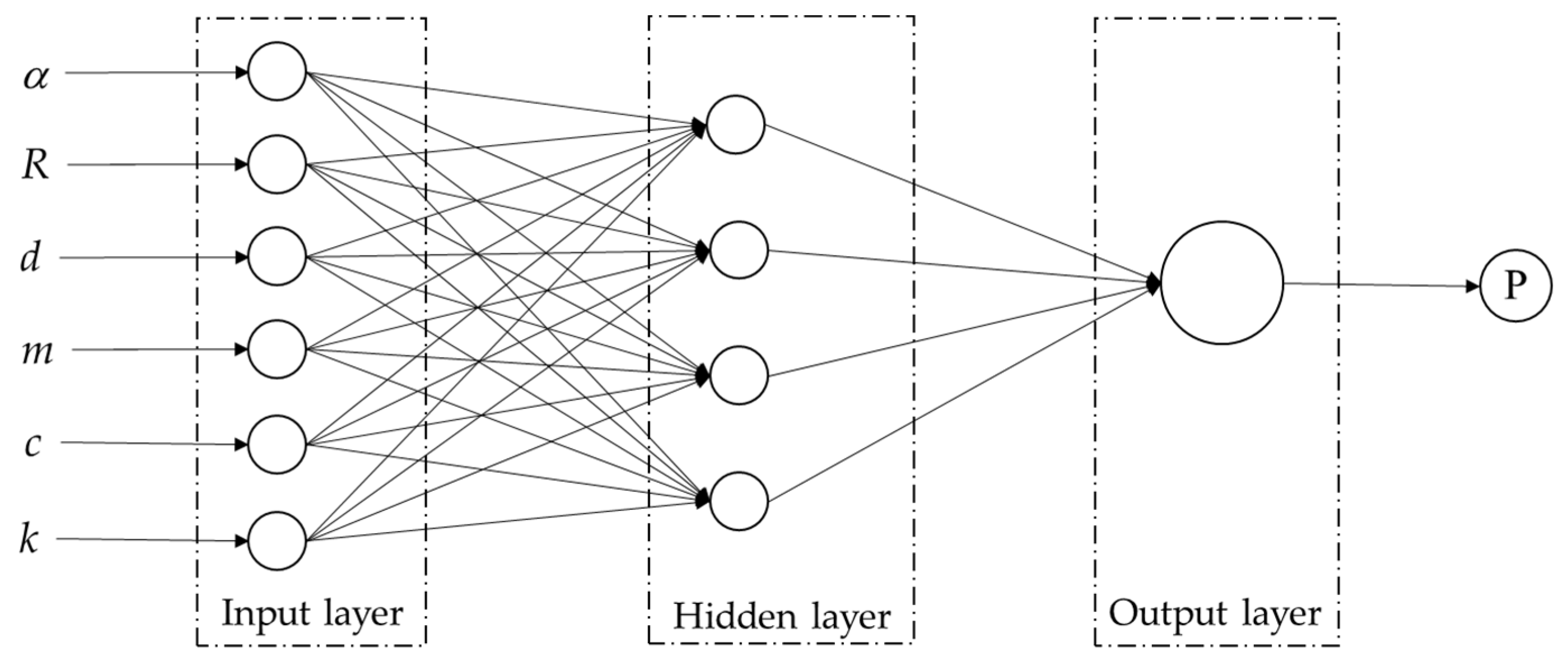
The first step to design a good neural network is to identify the number of hidden layers. A three layers neural network, which contains only one hidden layer, can simulate any reflection from n-dimensional inputs to m-dimensional outputs. Hence, a three-layer neural network with one hidden layer is selected in this study. Next, the nodes of each layer need to be identified. In this study, six key variables are selected, so the number of nodes in input layer is six. Only one parameter, capture power, needs to be predicted, so the number of nodes in output layer is one. Finally, the number of nodes in hidden layer needs to be identified. There is an empirical formula [38] that can be referred to identify the number of hidden nodes.
where l, n, and m are the number of nodes in hidden layer, input layer, and output layer, respectively; a is an adjustment constant ranging from 1 to 10.
In this paper, the number of hidden nodes is tested from 3 to 12 to identify the most suitable value. MSE is used to elevate the performance, and the results are shown in Table 1.
MSE reaches a minimum when the number of hidden nodes is 4, which is the optimal value for this case. The final BP neural network structure designed in this paper is shown in Figure 7.
According to the structure, the output bj of input layer can be expressed as follows:
where wij is the weight from the input layer to the hidden layer; xi is the input variable; θj is the threshold value of the hidden layer. The output y of the BP neural network is
where wj is the weight from the hidden layer to the output layer; θ’ is the threshold value of the output layer.
5.2. Data Standardization and Neural Network Training
Before training, data standardization for individual features needs to be conducted to improve training speed. The standardization formula used in this paper is
where x is the standardized result; xmax and xmin are the maximum and minimum values in the dataset, respectively. The standardized data have a distribution range between 0 and 1.
The network training process is to adjust the weights and thresholds so that the value of loss function reduces to a minimum. The training parameters for this model are shown in Table 2.
Tangent sigmoid function (tansig) is adopted for the hidden layer, and the linear function (purelin) is adopted for the output layer. In the training process, mean squared error is used as loss function. It is defined as
where m is the number of samples; is the observed value; y is the real value. In this paper, the top 80 samples are defined as training set. This model is trained in MATLAB R2019a, and the trendline of MSE for training set is shown as Figure 8.
The training process is terminated at 234 epochs because the gradient reaches the minimum (10−7). The rest 20 samples are used to test, and the forecasting results after being de-standardized are shown in the next section.
6. Results and Discussion
In this section, six groups’ forecasting data (ω = 0.53 rad/s, ω = 0.81 rad/s, ω = 1.14 rad/s, ω = 1.42 rad/s, ω = 1.76 rad/s, and ω = 2.09 rad/s) is given because they are the most common wave frequency. The desired outputs and forecasting results are presented in Figure 9 under different frequency. For each sample, the output power at 52 frequency points can be predicted.
In Figure 9a, the deviation of five samples (85, 90, 94, 99, and 100), which are at the lowest position of the graph, are relatively large, with mean error about 60 W. In Figure 9c, the error of sample 81 is the largest, with approximately 500 W. The forecasting results of sample 95 and 96 are rather larger than desired outputs in Figure 9d,f, and the error of sample 89 is around 200 W in Figure 9f. The highest accuracy is at ω = 0.81 rad/s and almost all the forecasting points fit the desired points. In contrast, the worst result is at ω = 2.09 rad/s and there are five forecasting results deviating the desired outputs.
To further verify the accuracy of the BP model, correlation coefficient (CC), root mean square error (RMSE), and error percentage are introduced in this section. They are defined as follows [29]
where m is the number of forecasting results; ti is the desired value; yi is the output of the network; and are average values of desired and forecasting results, respectively. The significance analysis of ANOVA is also conducted in MATLAB R2019a, and the statistical parameters (after de-standardization) are listed in Table 3.
The values of CC are greater than 0.9, meaning that the correlations with each group are well fitted. The values of RMSE do not exceed 140 W, and the error percentage is no more than 4%, indicating that desired outputs and forecasting results are reasonably fitted. All P values are close to 1, which means there is no significant difference between desired and forecasting outputs. These validation factors indicate that this model has a good prediction accuracy and meets the engineering requirement.
7. Conclusions
In this paper, capture power predictions of a specific shape floating body are attempted based on mathematical model, ANSYS-AQWA simulations, and BP neural network. The key variables are identified and the simulation scheme is proposed. A sample database is built by LHS and the corresponding power of each sample is calculated. In the end, a BP neural network, of which training set is from simulation results, is designed to predict the capture power at different wave frequency. Its performance and accuracy are also evaluated through statistical parameters.
According to the results, the conclusions can be given as follows:
- A mathematical model is constructed to identify the most important factors that affect the capture power. Four geometric parameters (radius, semi-vertical angle, mass, and submergence depth) and two system parameters (PTO damping coefficient and stiffness coefficient) are identified as key variables;
- A BP neural network with high accuracy is designed and it is used to predict the capture power. The error percentage of top five groups is less than 2.5%, and that of the last group is 4%. The values of CC are greater than 0.9 and that of RMSE are less than 80 W except for the third group, of which the value of RMSE is 138.7 W. The P values are close to 1. However, due to the error of simulations caused by commercial software, this method needs experimental data to support.
Author Contributions
Methodology, W.W.; Software, F.B.; Validation, W.W. and F.B.; Formal analysis, W.W.; Investigation, Y.L.; Resources, Y.L. and G.X.; Writing—original draft preparation, W.W.; Writing—review and editing, G.X.; Funding acquisition, Y.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Joint Research Fund under cooperative agreement between the National Natural Science Foundation of China and Shandong Provincial People’s Government (grant number U1706230), Shandong Province Major Science and Technology Innovation Project (grant number 2018CXGC0104), Marine Renewable Energy Fund Project (grant number GHME2017YY01), and National Key Research and Development Plan (2017YFE0115000).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors gratefully acknowledge the financial support from the Joint Research Fund under cooperative agreement between the National Natural Science Foundation of China and Shandong Provincial People’s Government (grant number U1706230), Shandong Province Major Science and Technology Innovation Project (grant number 2018CXGC0104), Marine Renewable Energy Fund Project (grant number GHME2017YY01), and National Key Research and Development Plan (2017YFE0115000).
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Details of 100 sample points.
| No. | α | R | d | m | c | k |
|---|---|---|---|---|---|---|
| 1 | 21.3 | 2.775 | 2.96 | 7190 | 21,500 | 3990 |
| 2 | 22.4 | 1.955 | 2.80 | 7970 | 13,700 | 3570 |
| 3 | 20.6 | 2.540 | 2.94 | 7930 | 25,700 | 4960 |
| 4 | 23.1 | 2.395 | 2.47 | 7840 | 24,000 | 3680 |
| 5 | 14.8 | 1.975 | 2.75 | 7460 | 20,900 | 5520 |
| 6 | 22.3 | 2.780 | 2.66 | 7490 | 22,500 | 3790 |
| 7 | 18.5 | 2.650 | 2.43 | 7760 | 29,400 | 4500 |
| 8 | 24.8 | 2.870 | 2.17 | 7440 | 10,500 | 4000 |
| 9 | 12.2 | 2.745 | 2.69 | 7020 | 18,000 | 5390 |
| 10 | 12.2 | 2.050 | 2.59 | 7130 | 20,000 | 5550 |
| 11 | 22.2 | 2.375 | 2.33 | 7470 | 14,500 | 4090 |
| 12 | 14.0 | 2.200 | 2.08 | 7940 | 17,600 | 4280 |
| 13 | 10.3 | 1.670 | 2.77 | 7300 | 28,500 | 5870 |
| 14 | 16.2 | 2.850 | 2.15 | 7360 | 27,600 | 3720 |
| 15 | 17.3 | 2.240 | 2.84 | 7670 | 21,900 | 5420 |
| 16 | 5.4 | 2.820 | 2.08 | 7170 | 10,700 | 4930 |
| 17 | 7.5 | 1.880 | 2.31 | 7680 | 14,900 | 3850 |
| 18 | 20.0 | 2.010 | 2.12 | 7790 | 23,000 | 4200 |
| 19 | 6.5 | 2.470 | 2.87 | 7620 | 26,400 | 3920 |
| 20 | 13.6 | 2.085 | 2.01 | 7230 | 24,200 | 5730 |
| 21 | 12.5 | 1.575 | 2.15 | 7990 | 26,600 | 4200 |
| 22 | 23.6 | 2.660 | 3.00 | 7850 | 23,200 | 5640 |
| 23 | 19.6 | 2.495 | 2.36 | 7750 | 25,500 | 3410 |
| 24 | 7.7 | 2.355 | 2.04 | 7490 | 24,600 | 5050 |
| 25 | 11.5 | 1.600 | 2.26 | 7550 | 10,000 | 4690 |
| 26 | 10.6 | 1.930 | 2.29 | 7270 | 14,100 | 3460 |
| 27 | 13.7 | 2.330 | 2.90 | 7530 | 16,900 | 5030 |
| 28 | 14.8 | 2.915 | 2.17 | 7260 | 17,800 | 3320 |
| 29 | 21.4 | 1.865 | 2.41 | 7340 | 10,200 | 5250 |
| 30 | 7.9 | 1.795 | 2.87 | 7250 | 18,400 | 4810 |
| 31 | 8.3 | 2.120 | 2.45 | 7480 | 13,200 | 5990 |
| 32 | 10.2 | 2.150 | 2.84 | 7510 | 19,100 | 3180 |
| 33 | 6.3 | 2.325 | 2.63 | 7810 | 16,300 | 4610 |
| 34 | 17.1 | 1.635 | 2.55 | 7360 | 22,200 | 3140 |
| 35 | 21.6 | 2.895 | 2.13 | 7070 | 13,000 | 5960 |
| 36 | 13.0 | 1.830 | 2.91 | 7740 | 12,000 | 4330 |
| 37 | 5.9 | 2.970 | 2.56 | 7630 | 15,700 | 3450 |
| 38 | 15.9 | 2.060 | 2.81 | 7780 | 16,600 | 4890 |
| 39 | 19.3 | 2.995 | 2.57 | 7160 | 10,900 | 3160 |
| 40 | 8.6 | 1.715 | 2.74 | 7090 | 14,700 | 5670 |
| 41 | 11.2 | 1.895 | 2.98 | 7810 | 17,100 | 4050 |
| 42 | 9.8 | 1.800 | 2.12 | 7720 | 28,800 | 4660 |
| 43 | 11.6 | 2.140 | 2.88 | 7990 | 19,500 | 5220 |
| 44 | 18.7 | 2.225 | 2.07 | 7040 | 24,900 | 4860 |
| 45 | 12.8 | 2.675 | 2.90 | 7670 | 13,400 | 3740 |
| 46 | 15.3 | 2.280 | 2.26 | 7210 | 13,900 | 4730 |
| 47 | 17.8 | 2.205 | 2.27 | 7330 | 22,100 | 5070 |
| 48 | 11.0 | 2.260 | 2.37 | 7380 | 22,800 | 3500 |
| 49 | 16.8 | 1.540 | 2.05 | 7440 | 19,300 | 3760 |
| 50 | 13.3 | 2.185 | 2.42 | 7900 | 22,900 | 4360 |
| 51 | 19.7 | 2.575 | 2.52 | 7710 | 28,100 | 5210 |
| 52 | 9.1 | 2.300 | 2.25 | 7600 | 23,600 | 4420 |
| 53 | 22.8 | 2.945 | 2.82 | 7830 | 18,400 | 5890 |
| 54 | 7.0 | 2.485 | 2.05 | 7090 | 15,800 | 5440 |
| 55 | 21.0 | 1.745 | 2.70 | 7020 | 15,300 | 3010 |
| 56 | 5.3 | 1.690 | 2.77 | 7110 | 27,700 | 5830 |
| 57 | 7.4 | 2.805 | 2.09 | 7130 | 12,000 | 3390 |
| 58 | 15.1 | 2.830 | 2.66 | 7860 | 28,700 | 4290 |
| 59 | 15.6 | 1.700 | 2.02 | 7310 | 20,800 | 3280 |
| 60 | 16.2 | 1.555 | 2.70 | 7150 | 17,300 | 5330 |
| 61 | 9.4 | 1.915 | 2.47 | 7190 | 11,200 | 5930 |
| 62 | 6.7 | 2.890 | 2.68 | 7700 | 27,000 | 5130 |
| 63 | 23.7 | 2.110 | 2.23 | 7400 | 22,000 | 4570 |
| 64 | 18.3 | 2.080 | 2.18 | 7570 | 24,100 | 3620 |
| 65 | 24.1 | 2.620 | 2.95 | 7120 | 15,400 | 3340 |
| 66 | 16.6 | 1.755 | 2.79 | 7660 | 18,000 | 4490 |
| 67 | 24.6 | 2.690 | 2.02 | 7860 | 16,000 | 4230 |
| 68 | 8.9 | 2.035 | 2.34 | 7280 | 18,800 | 5720 |
| 69 | 5.0 | 2.440 | 2.42 | 7880 | 12,300 | 4770 |
| 70 | 21.9 | 1.520 | 2.29 | 7200 | 12,800 | 3930 |
| 71 | 13.1 | 2.425 | 2.53 | 7870 | 27,300 | 4750 |
| 72 | 9.6 | 2.635 | 2.21 | 7650 | 26,000 | 3820 |
| 73 | 24.8 | 2.170 | 2.83 | 7950 | 20,300 | 3650 |
| 74 | 10.5 | 1.640 | 2.55 | 7420 | 28,600 | 4160 |
| 75 | 11.9 | 1.610 | 2.63 | 7910 | 19,000 | 4920 |
| 76 | 23.9 | 2.400 | 2.34 | 7340 | 24,500 | 4630 |
| 77 | 5.8 | 1.985 | 2.38 | 7080 | 28,300 | 5470 |
| 78 | 22.7 | 2.700 | 2.49 | 7580 | 20,600 | 5540 |
| 79 | 18.9 | 1.590 | 2.10 | 7220 | 21,600 | 4070 |
| 80 | 24.3 | 2.605 | 2.32 | 7030 | 25,300 | 4990 |
| 81 | 15.5 | 2.510 | 2.71 | 7550 | 26,800 | 3570 |
| 82 | 17.7 | 2.550 | 2.20 | 7520 | 23,500 | 5360 |
| 83 | 11.3 | 1.775 | 2.96 | 7580 | 19,600 | 3080 |
| 84 | 18.2 | 2.020 | 2.98 | 7770 | 15,000 | 4550 |
| 85 | 10.0 | 2.585 | 2.21 | 7720 | 11,700 | 3890 |
| 86 | 19.2 | 1.655 | 2.46 | 7430 | 22,000 | 5310 |
| 87 | 8.7 | 2.715 | 2.73 | 7290 | 27,900 | 5630 |
| 88 | 13.8 | 2.265 | 2.65 | 7590 | 23,100 | 3240 |
| 89 | 20.3 | 2.740 | 2.85 | 7530 | 21,100 | 5120 |
| 90 | 14.6 | 2.980 | 2.23 | 7060 | 13,000 | 5180 |
| 91 | 7.2 | 2.360 | 2.39 | 7630 | 14,400 | 3110 |
| 92 | 20.0 | 1.940 | 2.50 | 7280 | 21,300 | 4460 |
| 93 | 17.4 | 1.515 | 2.40 | 7390 | 16,800 | 3530 |
| 94 | 6.0 | 2.935 | 2.62 | 7750 | 12,400 | 4390 |
| 95 | 20.8 | 2.530 | 2.60 | 7920 | 27,500 | 5770 |
| 96 | 21.1 | 1.740 | 2.93 | 7390 | 20,100 | 3060 |
| 97 | 23.3 | 2.450 | 2.52 | 7960 | 23,900 | 5800 |
| 98 | 16.9 | 1.840 | 2.50 | 7140 | 20,000 | 4120 |
| 99 | 8.0 | 2.840 | 2.60 | 7900 | 11,500 | 5600 |
| 100 | 14.3 | 1.855 | 2.73 | 7010 | 11,100 | 3270 |
References
- Mccabe, A.P.; Aggidis, G.A.; Widden, M.B. Optimizing the shape of a surge-and-pitch wave energy collector using a genetic algorithm. Renew. Energy 2010, 35, 2767–2775. [Google Scholar] [CrossRef]
- Colby, M.K.; Nasroullahi, E.M.; Tumer, K. Optimizing ballast design of wave energy converters using evolutionary algorithms. In Proceedings of the 13th Annual Genetic and Evolutionary Computation Conference (GECCO 2011), Dublin, Ireland, 12–16 July 2011; pp. 1739–1746. [Google Scholar]
- Fang, H.; Jin, L. Investigation on Resonance Response of Mass-Adjustable Float in Wave Energy Conversion System. Energy Procedia 2019, 158, 315–320. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Analytical representation of nonlinear Froude-Krylov forces for 3-DoF point absorbing wave energy devices. Ocean Eng. 2018, 164, 749–759. [Google Scholar] [CrossRef] [Green Version]
- Le-Ngoc, L.; Gardiner, A.I.; Stuart, R.J.; Caughley, A.J.; Huckerby, J.A. Progress in the development of a multimode self-reacting wave energy converter. OCEANS 2010, 2010, 1–7. [Google Scholar]
- Gao, H.; Yu, Y. The dynamics and power absorption of cone-cylinder wave energy converters with three degree of freedom in irregular waves. Energy 2018, 143, 833–845. [Google Scholar] [CrossRef]
- Reabroy, R.; Zheng, X.; Zhang, L.; Zang, J.; Yuan, Z.; Liu, M.; Sun, K.; Tiaple, Y. Hydrodynamic response and power efficiency analysis of heaving wave energy converter integrated with breakwater. Energy Convers. Manag. 2019, 195, 1174–1186. [Google Scholar] [CrossRef]
- Liang, C.; Ai, J.; Zuo, L. Design, fabrication, Simulation and testing of an ocean wave energy converter with mechanical motion rectifier. Ocean Eng. 2017, 136, 190–200. [Google Scholar] [CrossRef]
- Li, X.; Martin, D.; Liang, C.; Chen, C.; Parker, R.G.; Zuo, L. Characterization and verification of a two-body wave energy converter with a novel power take-off. Renew. Energy 2020, 163, 910–920. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, B.; Zhang, L.; Li, C.; Zang, J.; Zheng, X.; Xu, J.; Zhang, W. Experimental and numerical study on a novel dual-resonance wave energy converter with a built-in power take-off system. Energy 2018, 165, 1008–1020. [Google Scholar] [CrossRef]
- WaveNET–the Floating, Flexible Wave Energy Generator. Available online: https://newatlas.com/albatern-wavenet-squid-floating-wave-energy/34942/ (accessed on 22 April 2021).
- Sun, P.; Li, Q.; He, H.; Chen, H.; Zhang, J.; Li, H.; Liu, D. Design and optimization investigation on hydraulic transmission and energy storage system for a floating-array-buoys wave energy converter. Energy Convers. Manag. 2021, 235, 113998. [Google Scholar] [CrossRef]
- Liu, Z.; Qu, N.; Han, Z.; Zhang, J.; Zhang, S.; Li, M.; Shi, H. Study on energy conversion and storage system for a prototype buoys-array wave energy converter. Energy Sustain. Dev. 2016, 34, 100–110. [Google Scholar] [CrossRef]
- Zou, J. Numerical Simulation of Wave Energy Use Efficiency of Oscillating Buoy and Its Influence Parameters. Master’s Dissertation, Harbin Institute of Technology, Harbin, China, December 2014. [Google Scholar]
- Yu, L. The Performance Research on the Oscillating Float Type Wave Energy Converter. Master’s Dissertation, Harbin Engineering University, Harbin, China, March 2016. [Google Scholar]
- Wu, L. Study on Hydrodynamic Performance and Energy Conversion Efficiency of a Three-Dimensional Two-Body WEC. Master’s Dissertation, Harbin Engineering University, Harbin, China, March 2017. [Google Scholar]
- Zheng, X. Study on the Hydrodynamic Performance for Two Kinds of Point Absorbing Wave Energy Device. Doctor’s Dissertation, Harbin Engineering University, Harbin, China, June 2016. [Google Scholar]
- Ma, Y.; Zhang, A.; Yang, L.; Li, H.; Zhai, Z.; Zhou, H. Motion simulation and performance analysis of two-body floating point absorber wave energy converter. Renew. Energy 2020, 157, 353–367. [Google Scholar] [CrossRef]
- Ji, X.; Shami, E.A.; Monty, J.; Wang, X. Modelling of linear and non-linear two-body wave energy converters under regular and irregular wave conditions. Renew. Energy 2020, 147, 487–501. [Google Scholar] [CrossRef]
- Tongphong, W.; Kim, B.H.; Kim, I.C.; Lee, Y.H. A study on the design and performance of ModuleRaft wave energy converter. Renew. Energy 2021, 163, 649–673. [Google Scholar] [CrossRef]
- Ma, Y.; Ai, S.; Yang, L.; Zhang, A.; Liu, S.; Zhou, B. Research on design and optimization of the pitching float wave energy converter. Energy Sci. Eng. 2020, 8, 3866–3882. [Google Scholar] [CrossRef]
- Amiri, A.; Panahi, R.; Radfar, S. Parametric study of two-body floating-point wave absorber. J. Mar. Sci. Appl. 2016, 15, 41–49. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Y. A RANS Simulation of the Heave Response of a Two-Body Floating-Point Wave Absorber. In Proceedings of the 21st International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Bosma, B.; Zhang, Z.; Brekken, T.K.A.; Özkan-Haller, H.T.; McNatt, C.; Yim, S.C. Wave energy converter modeling in the frequency domain: A design guide. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2099–2106. [Google Scholar]
- Bosma, B.; Brekken, T.K.A.; Özkan-Haller, H.T.; Yim, S.C. Wave energy converter modeling in the time domain: A design guide. In Proceedings of the 1st IEEE Conference on Technologies for Sustainability, Portland, OR, USA, 1–2 August 2013; pp. 103–108. [Google Scholar]
- Law, Y.Z.; Santo, H.; Lim, K.Y.; Chan, E.S. Deterministic wave prediction for unidirectional sea-states in real-time using Artificial Neural Network. Ocean Eng. 2020, 195, 106722. [Google Scholar] [CrossRef]
- Desouky, M.A.A.; Abdelkhalik, O. Wave prediction using wave rider position measurements and NARX network in wave energy conversion. Appl. Ocean Res. 2018, 82, 10–21. [Google Scholar] [CrossRef]
- Kumar, N.K.; Savitha, R.; Al Mamun, A. Regional ocean wave height prediction using sequential learning neural networks. Ocean Eng. 2017, 129, 605–612. [Google Scholar] [CrossRef]
- Zheng, C.; Li, C. Variation of the wave energy and significant wave height in the China Sea and adjacent waters. Renew. Sustain. Energy Rev. 2015, 43, 381–387. [Google Scholar] [CrossRef]
- Avila, D.; Marichal, G.N.; Padron, I.; Quiza, R.; Hernandez, A. Forecasting of wave energy in Canary Islands based on Artificial Intelligence. Appl. Ocean Res. 2020, 101, 102189. [Google Scholar] [CrossRef]
- Wang, Y. Efficient prediction of wave energy converters power output considering bottom effects. Ocean Eng. 2019, 181, 89–97. [Google Scholar] [CrossRef]
- Halliday, J.R.; Dorrell, D.G.; Wood, A.R. An application of the Fast Fourier Transform to the short-term prediction of sea wave behaviour. Renew. Energy 2011, 36, 1685–1692. [Google Scholar] [CrossRef]
- Davis, A.F.; Fabien, B.C. Wave excitation force estimation of wave energy floats using extended Kalman filters. Ocean Eng. 2020, 198, 106970. [Google Scholar] [CrossRef] [Green Version]
- Ni, C.; Ma, X.; Wang, J. Integrated deep learning model for predicting electrical power generation from wave energy converter. In Proceedings of the 25th International Conference on Automation and Computing (ICAC), Lancaster University, Lancaster, UK, 5–7 September 2019; pp. 192–197. [Google Scholar]
- Peng, J. Study on Hydrodynamic Performance for Oscillating Float Buoy Wave Energy Converter. Doctor’s Dissertation, Shandong University, Jinan, China, May 2014. [Google Scholar]
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Hornik, K. Approximation capabilities of multilayer feedforward networks. Neural Netw. 1991, 4, 251–257. [Google Scholar] [CrossRef]
- Ma, X.; Guan, Y.; Mao, R.; Zheng, S.; Wei, Q. Modeling of lead removal by living Scenedesmus obliquus using backpropagation (BP) neural network algorithm. Environ. Technol. Innov. 2021, 22, 101410. [Google Scholar] [CrossRef]
Figure 1.
Mechanical model.

Figure 2.
Sample scatter diagrams. (a) semi-vertical angle; (b) radius; (c) submergence depth; (d) mass; (e) damping; (f) stiffness.
Figure 2.
Sample scatter diagrams. (a) semi-vertical angle; (b) radius; (c) submergence depth; (d) mass; (e) damping; (f) stiffness.


Figure 3.
The correlation coefficients between the inputs and output.

Figure 4.
Schematic of the floating body’s structure.

Figure 5.
Mean capture power of sample 1 and sample 2.

Figure 6.
Power curves from simulations and theories. (a) results of sample 1; (b) results of sample 2.
Figure 6.
Power curves from simulations and theories. (a) results of sample 1; (b) results of sample 2.

Figure 7.
Structure of the designed BP neural network.

Figure 8.
The trendline of training loss versus epochs.

Figure 9.
Comparisons between desired outputs and forecasting results. (a) ω = 0.53 rad/s; (b) ω = 0.81 rad/s; (c) ω = 1.14 rad/s; (d) ω = 1.42 rad/s; (e) ω = 1.76 rad/s; (f) ω = 2.09 rad/s.
Figure 9.
Comparisons between desired outputs and forecasting results. (a) ω = 0.53 rad/s; (b) ω = 0.81 rad/s; (c) ω = 1.14 rad/s; (d) ω = 1.42 rad/s; (e) ω = 1.76 rad/s; (f) ω = 2.09 rad/s.


Table 1.
The number of hidden nodes and the values of MSE.
| Number of Nodes | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|
| MSE | 0.0215 | 0.0160 | 0.0236 | 0.0238 | 0.0274 | 0.0263 | 0.0371 | 0.0338 | 0.0364 | 0.0341 |
Table 2.
Training parameters.
| Weight Change Rate | Learning Rate | Training Epochs | Performance (Judged by Mean Square Error) | Minimum Gradient | Validation Checks |
|---|---|---|---|---|---|
| 0.01 | 0.05 | 1000 | 10−5 | 10−7 | 6 |
Table 3.
The statistical parameters between desired and forecasting results.
| Wave Frequency (rad/s) | CC | RMSE (W) | Error Percentage | p Value |
|---|---|---|---|---|
| 0.53 | 0.95931 | 37.5 | 2.03% | 0.9588 |
| 0.81 | 0.90129 | 60.5 | 1.79% | 0.9769 |
| 1.14 | 0.92105 | 138.7 | 2.45% | 0.9206 |
| 1.42 | 0.91295 | 78.8 | 2.22% | 0.9691 |
| 1.76 | 0.92558 | 61.6 | 2.7% | 0.9789 |
| 2.09 | 0.94852 | 69.3 | 4% | 0.9362 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, W.; Liu, Y.; Bai, F.; Xue, G. Capture Power Prediction of the Frustum of a Cone Shaped Floating Body Based on BP Neural Network. J. Mar. Sci. Eng. 2021, 9, 656. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9060656
AMA Style
Wang W, Liu Y, Bai F, Xue G. Capture Power Prediction of the Frustum of a Cone Shaped Floating Body Based on BP Neural Network. Journal of Marine Science and Engineering. 2021; 9(6):656. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9060656
Chicago/Turabian StyleWang, Wei, Yanjun Liu, Fagang Bai, and Gang Xue. 2021. "Capture Power Prediction of the Frustum of a Cone Shaped Floating Body Based on BP Neural Network" Journal of Marine Science and Engineering 9, no. 6: 656. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9060656
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.