
Round Robin Laboratory Testing of a Scaled 10 MW Floating Horizontal Axis Wind Turbine

 , , , , , ,
, , , , , ,
Abstract
:1. Introduction
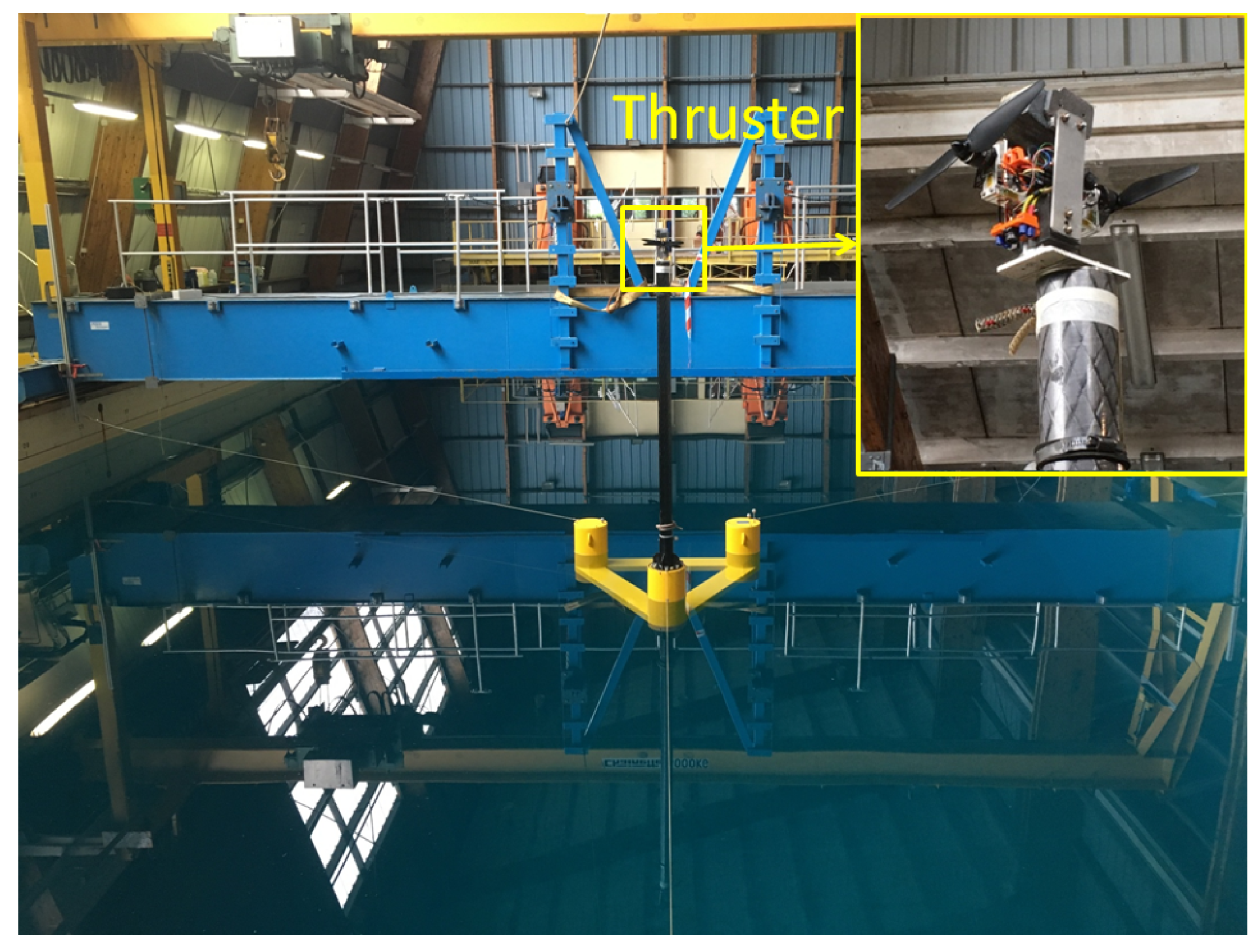
2. Model and Instrumentation Details
- It causes a horizontal drift motion that affects the tension in the mooring lines.
- Due to the height at which the thrust is exerted, the moment around the CoG of the platform is very large and often causes the platform to rotate. Under the steady thrust levels that are the investigated in the present study, the submerged geometry of the floater will vary and this could influence its response to waves.
- When the thrust varies under the combined effects of the wind, the platform’s motions and the wind turbine controller, these variations have a direct effect on the motions of the floater by modifying the level of damping. This effect is not accounted for in the present test set-up as the thrust is constant when active.
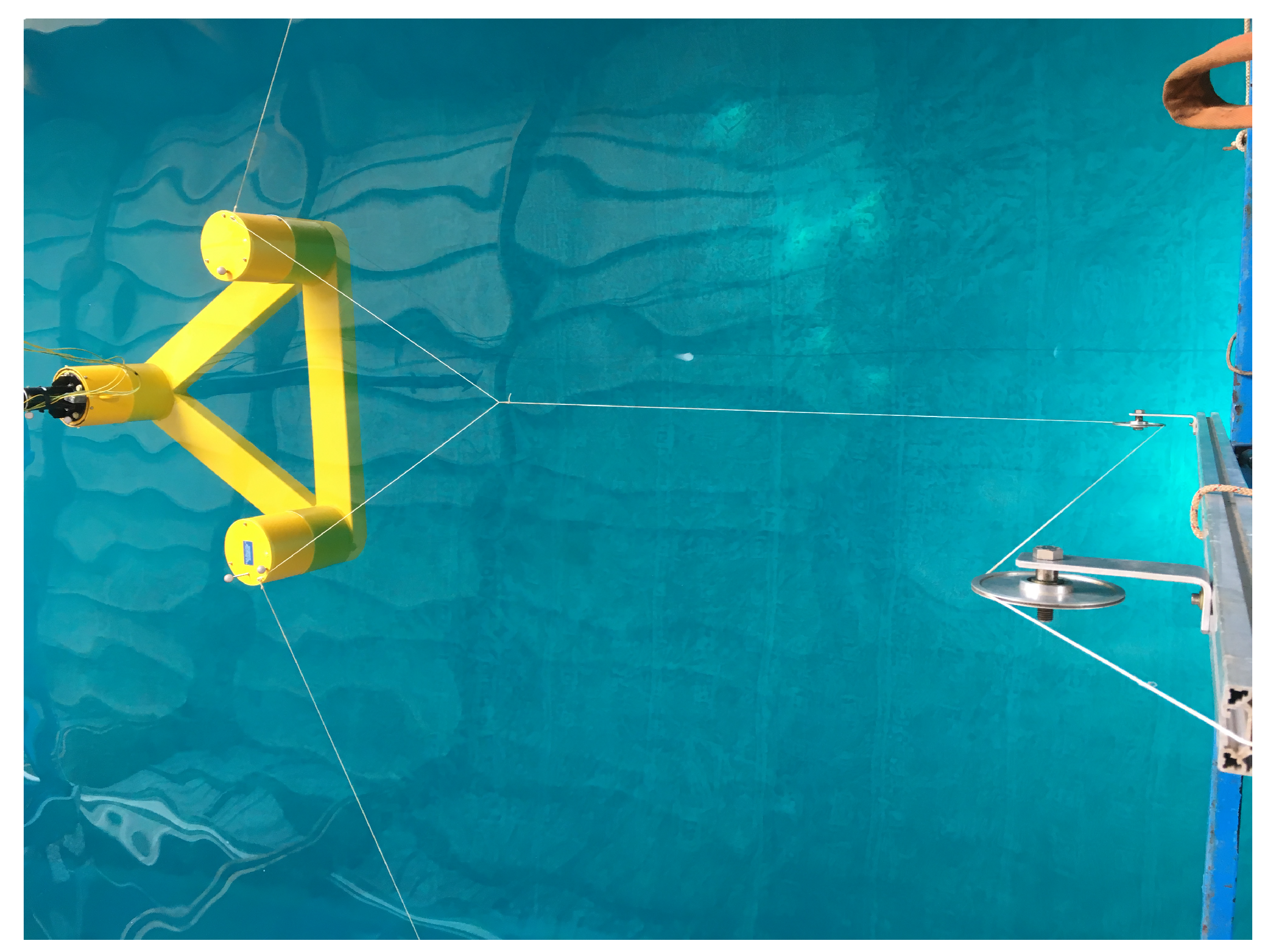
3. Facility Details and Experimental Setup
3.1. Mooring System
3.2. Instrumentation
4. Test Plan
- Hydrostatics: check of water draft and Metacentric Height (GM) moduli (with and without mooring)
- Mooring stiffness: check surge and sway stiffness
- Decay tests in calm water: without moorings (heave, pitch and roll only) and with moorings (all motions)
- Regular wave tests: without wind thrust (see Table 2)
- Irregular wave tests: with and without wind thrust (see Table 3)
5. Results
5.1. Measured Physical Parameters
- Weighing the model by hanging it to a scale.
- Calculating the position of the centre of gravity (CoG) and the radii of gyration () through swing tests.
- Calculating the position of the metacenter () through inclination tests.
- Calculating the total mooring stiffness in surge () and sway () through static pull-out tests.
5.2. Static Pull-Out Tests and Tests in Still Water with Constant Thrust
5.3. Still Water Decay Tests
5.4. Responses in Waves
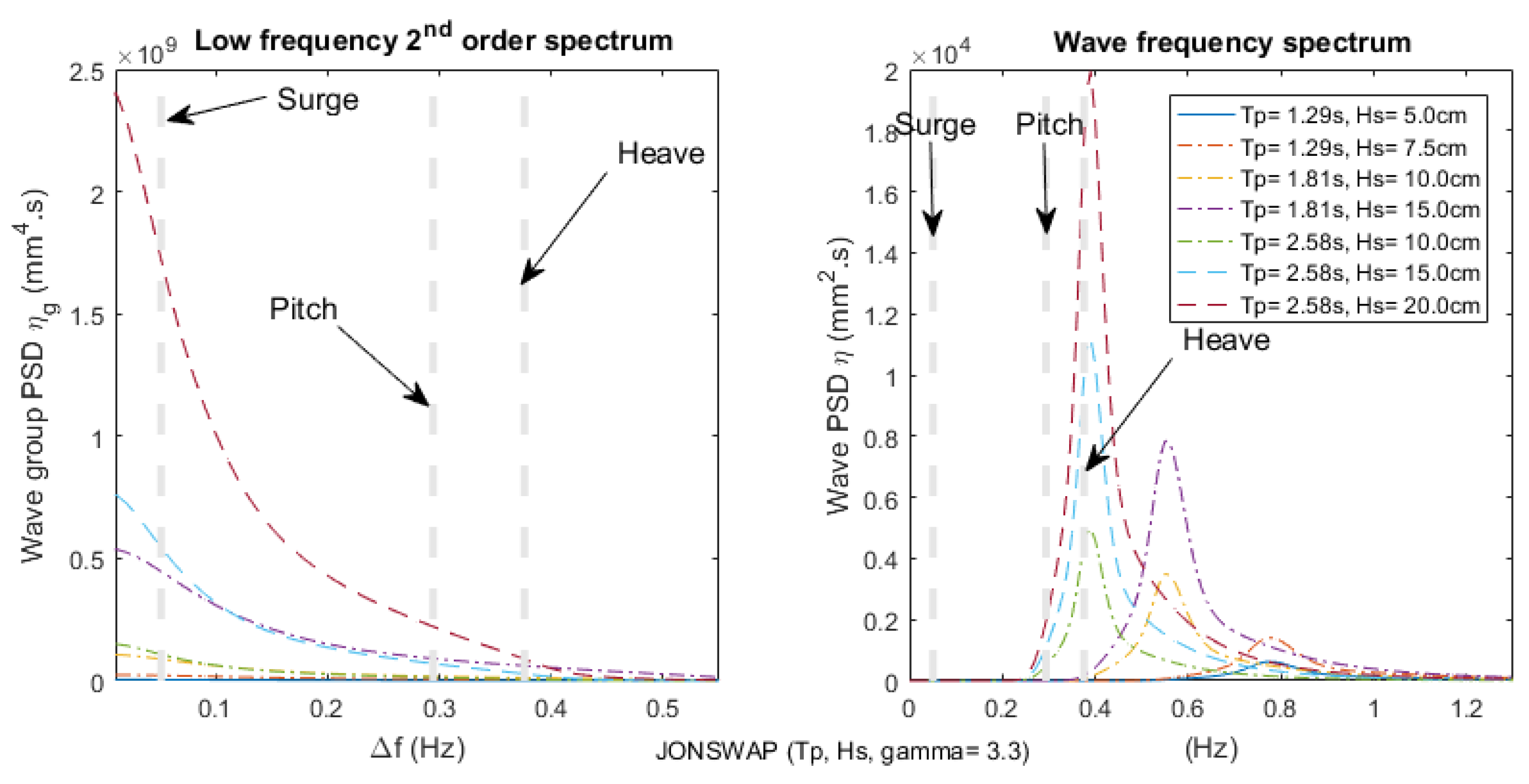
5.4.1. JONSWAP Waves and Expected Effects on Responses
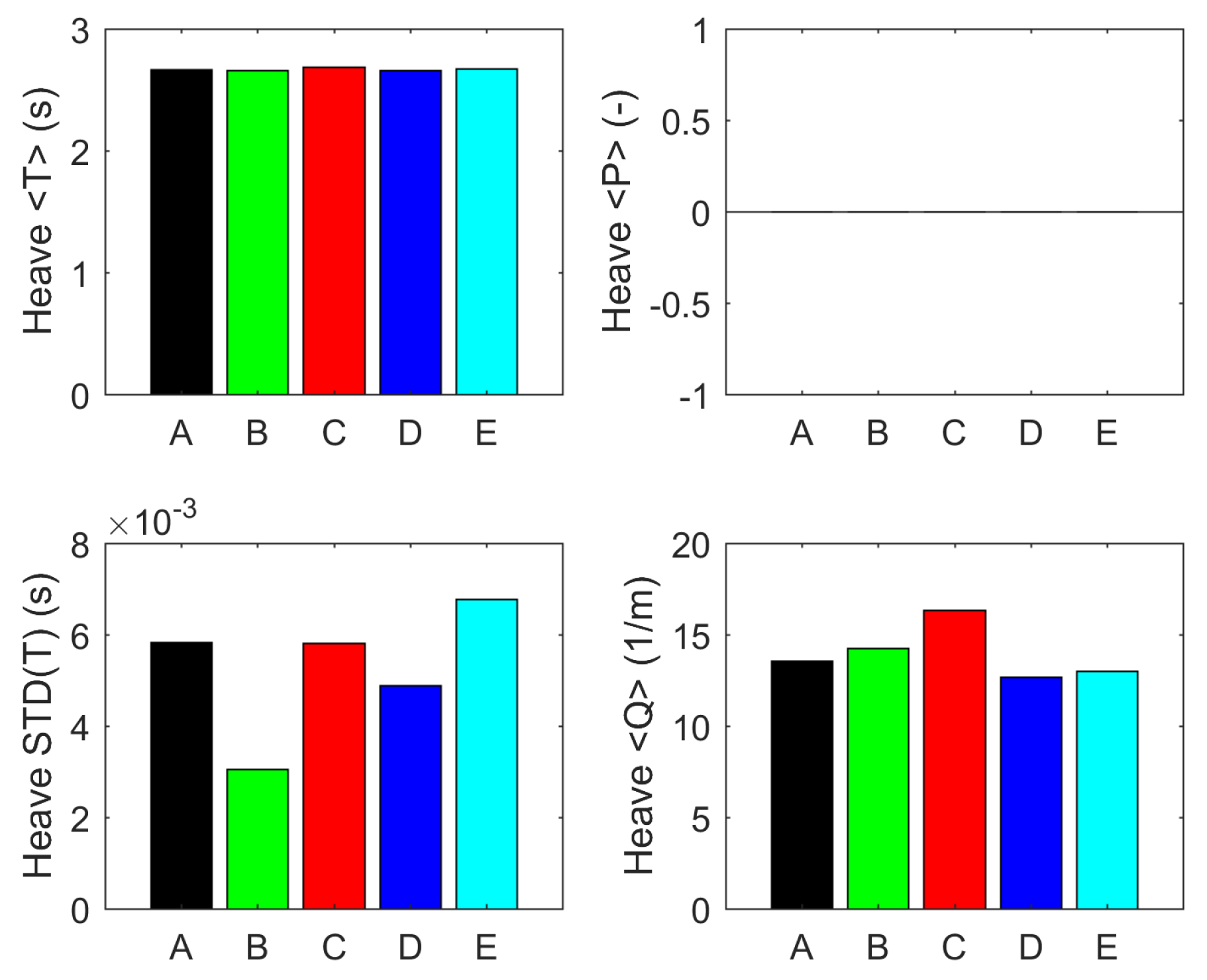
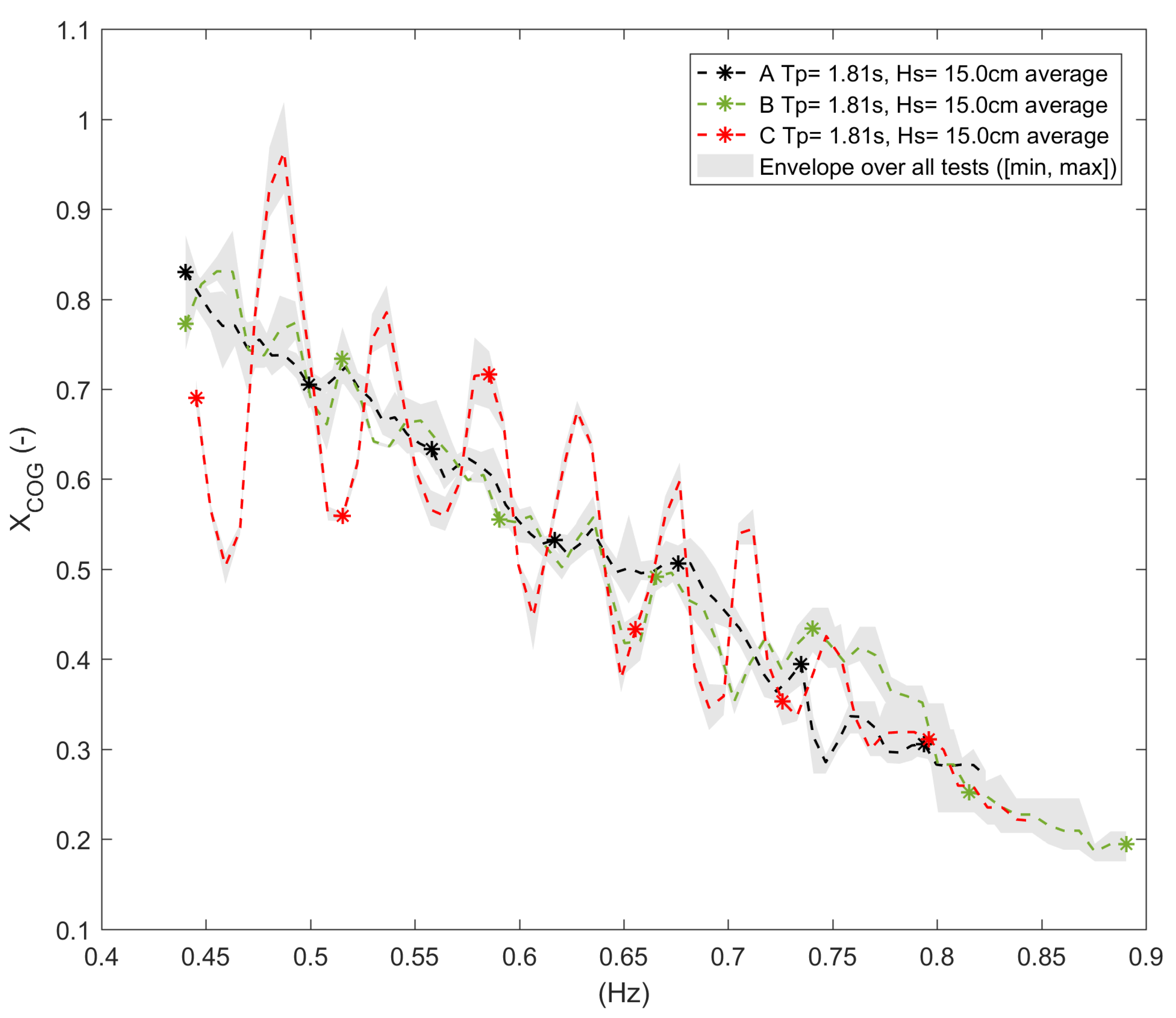
5.4.2. Effect of Wave Seed on Responses
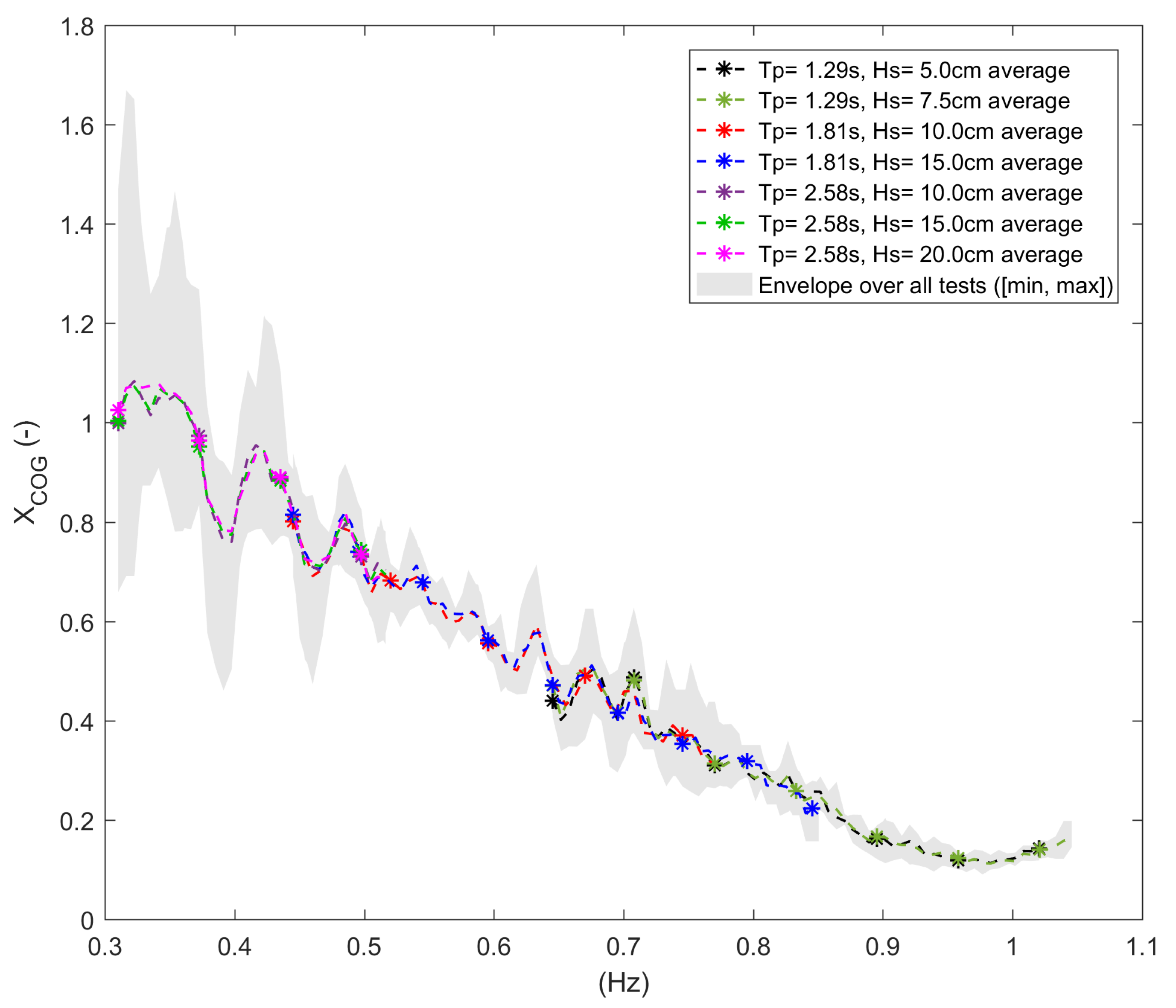
5.4.3. RAOs for All JONSWAP Waves
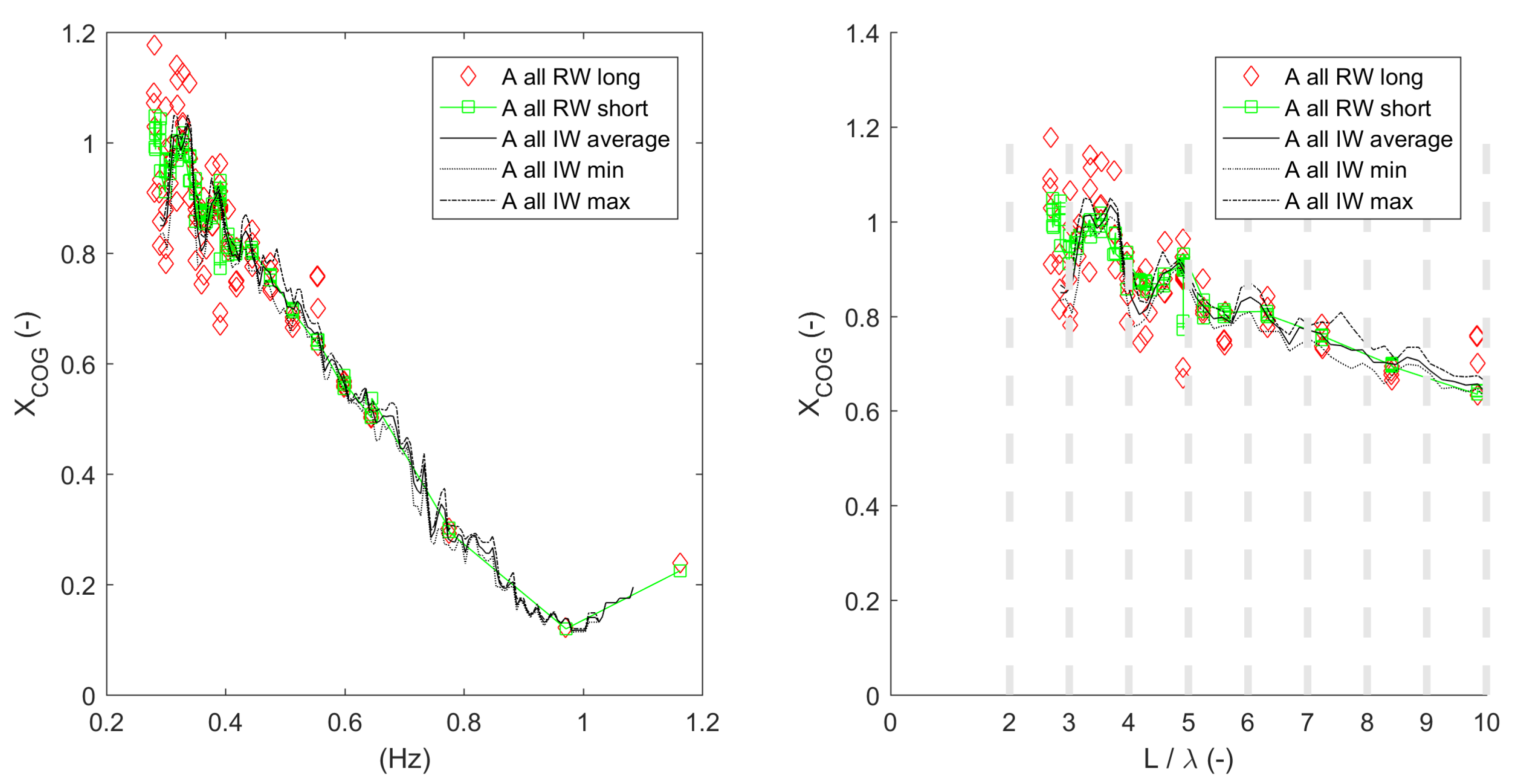
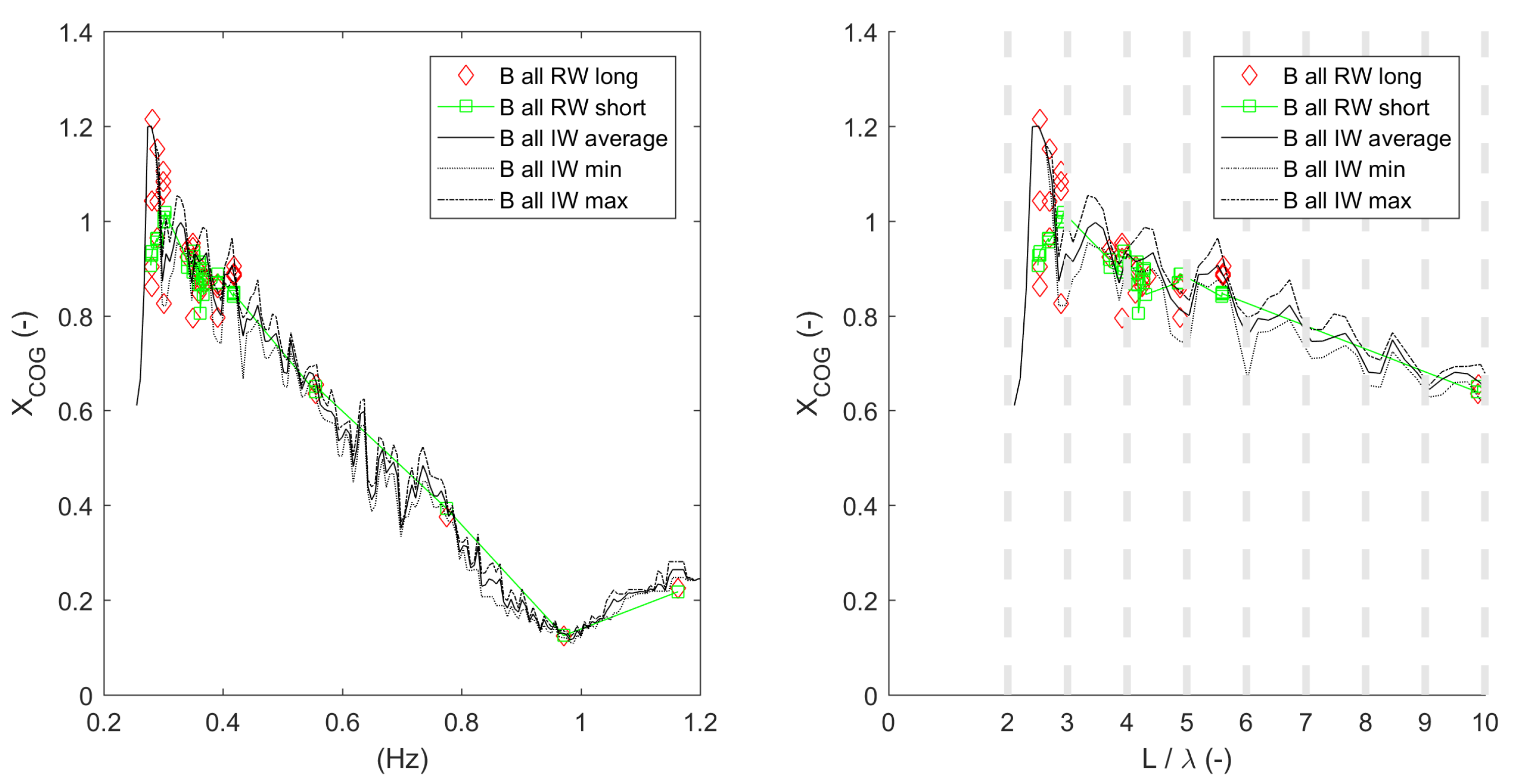
5.4.4. Impact of Reflection
- ‘Short’: RAO obtained from all regular waves using time intervals during which the longitudinal reflected waves have not yet reached the model. As the wave periods get longer, the wave travels faster and this interval becomes shorter.
- ‘Long’: RAO obtained from all regular waves using a time interval that includes the effect of the longitudinal reflected waves. This interval is chosen so as to be as long as possible, and aims to capture a sequence of wave cycles during which the wave is fully developed and the motions are steady.
- ‘IW’: average RAO and its envelop obtained from all tests with irregular waves in the basin (i.e., JONSWAP and Pink-Noise waves when available). These results include the effects of the reflected waves.
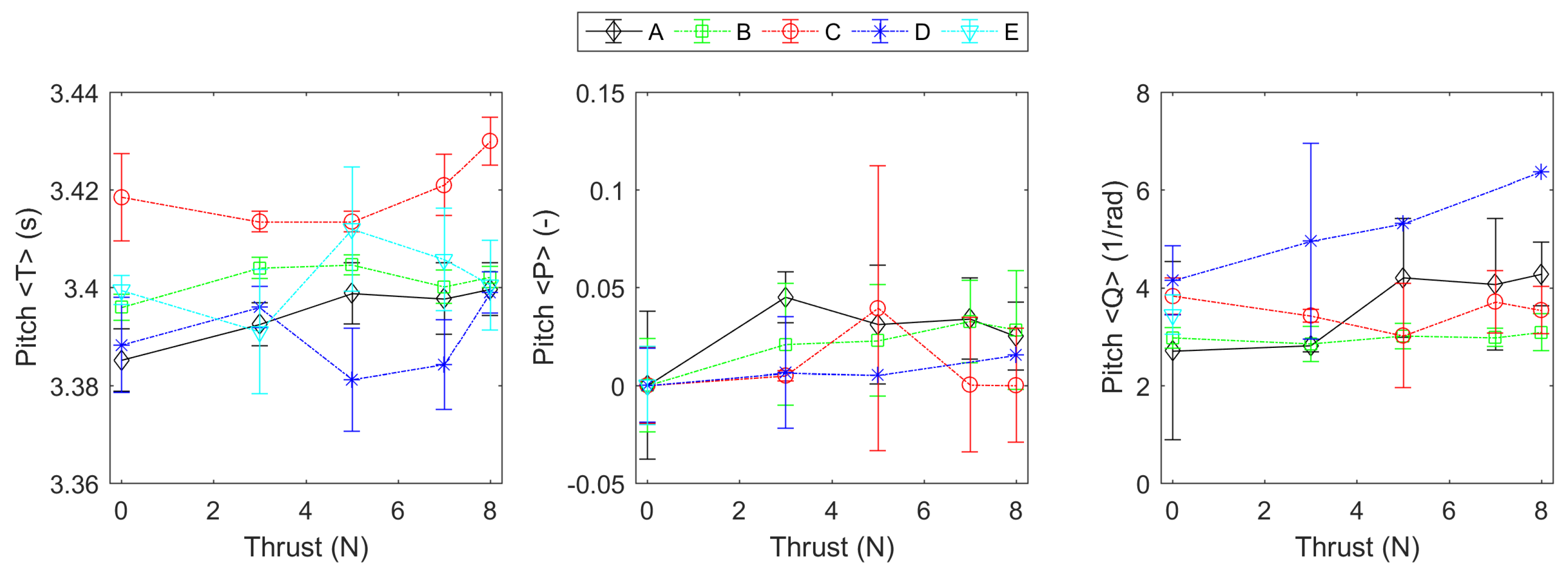
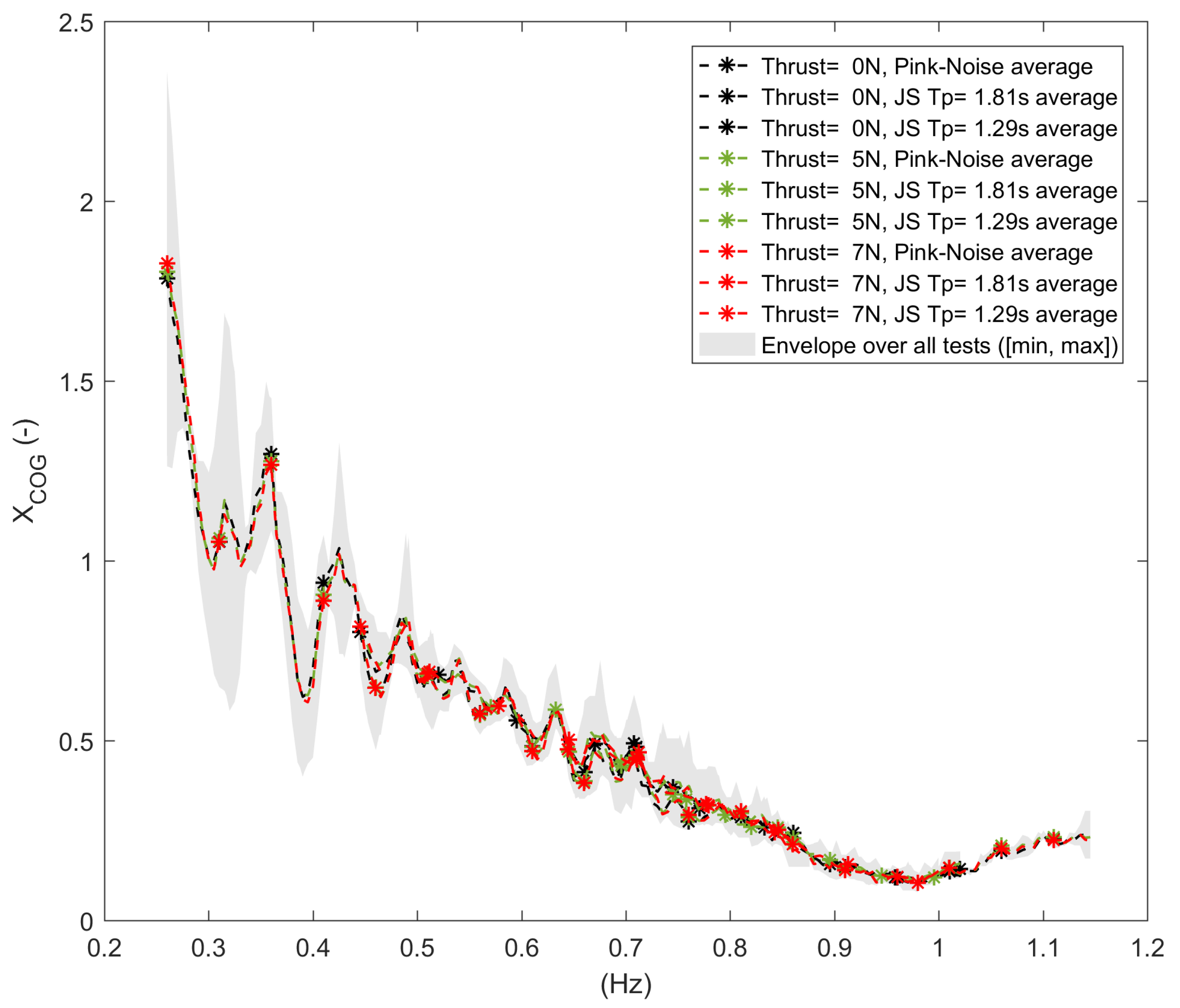
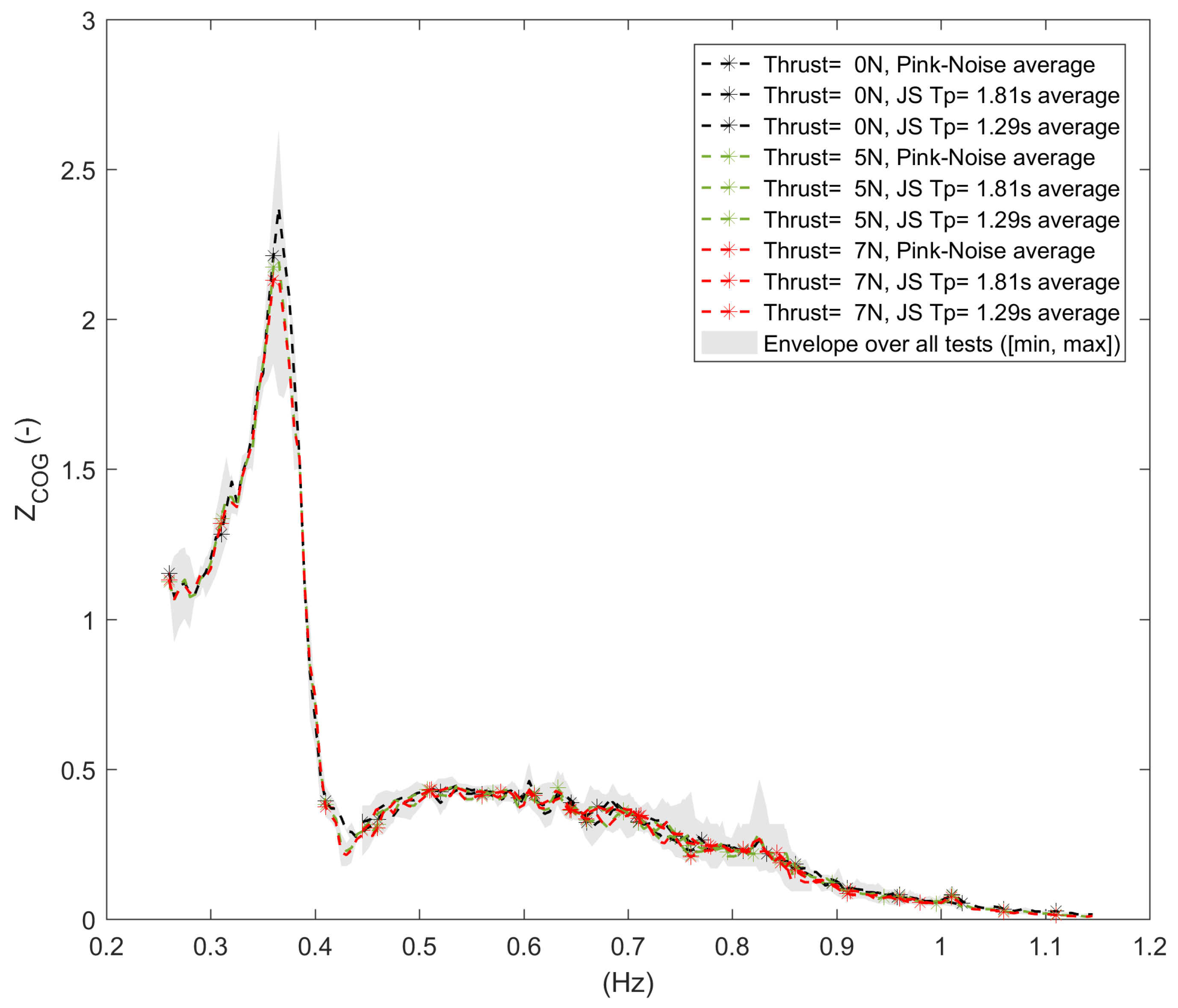
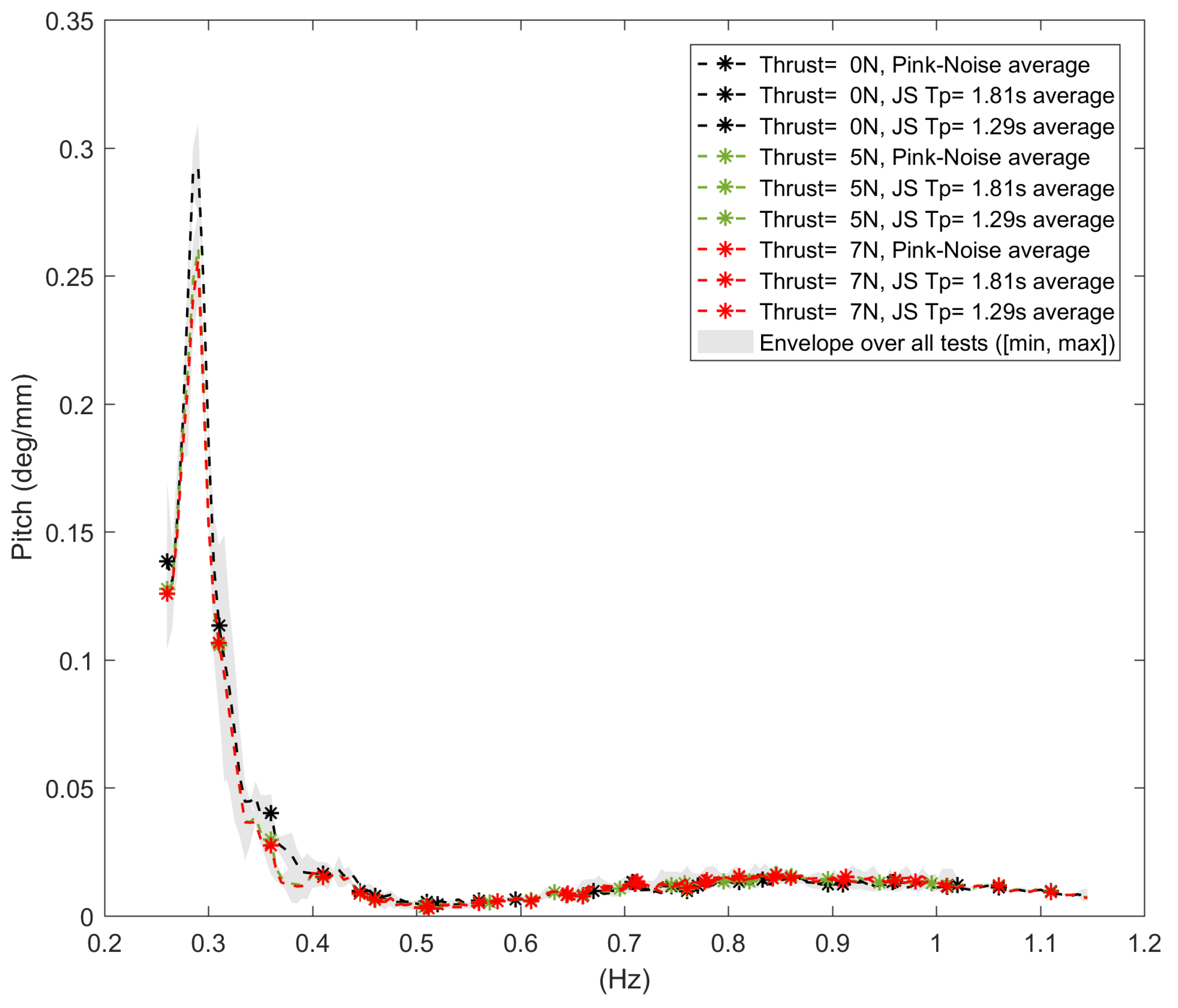
5.5. Responses in Waves under Constant Thrust
6. Discussion
6.1. Global Surge Stiffness
6.2. Damping
6.3. Wave Height and Wave Steepness with the Interference of Reflection
6.4. Constant Thrust
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
| 1 | https://windeurope.org accessed on 8 September 2021. |
| 2 | www.marinet2.eu accessed on 8 September 2021. |
| 3 | Register of ITTC guidelines available at https://www.ittc.info/media/4251/register.pdf accessed on 8 September 2021. |
References
- Gueydon, S.; Bayati, I.; de Ridder, E.J. Discussion of solutions for basin model tests of FOWTs in combined waves and wind. Ocean Eng. 2020, 209, 107288. [Google Scholar] [CrossRef]
- Noble, D.R.; Draycott, S.; Ordonez Sanchez, S.; Porter, K.; Johnstone, C.; Finch, S.; Judge, F.; Desmond, C.; Santos Varela, B.; Lopez Mendia, J.; et al. D2.1 Test Recommendations and Gap Analysis Report. Technical Report, MaRINET2. 2018. Available online: https://www.marinet2.eu/project-reports-2/ (accessed on 8 September 2021).
- Noble, D.; O’Shea, M.; Judge, F.; Martinez, R.; Robles, E.; Corlay, Y.; Gabl, R.; Davey, T.; Vejayan, N. Standardising Marine Renewable Energy Testing: Gap Analysis and Recommendations for Development of Standards. J. Mar. Sci. Eng. 2021, 9, 971. [Google Scholar] [CrossRef]
- Gaurier, B.; Germain, G.; Facq, J.V.; Johnstone, C.; Grant, A.; Day, A.; Nixon, E.; Di Felice, F.; Costanzo, M. Tidal energy “Round Robin” tests comparisons between towing tank and circulating tank results. Int. J. Mar. Energy 2015, 12, 87–109. [Google Scholar] [CrossRef] [Green Version]
- Gaurier, B.; Ordonez-Sanchez, S.; Facq, J.V.; Germain, G.; Johnstone, C.; Martinez, R.; Salvatore, F.; Santic, I.; Davey, T.; Old, C.; et al. MaRINET2 Tidal Energy Round Robin Tests—Performance Comparison of a Horizontal Axis Turbine Subjected to Combined Wave and Current Conditions. J. Mar. Sci. Eng. 2020, 8, 463. [Google Scholar] [CrossRef]
- Martinez, R.; Gaurier, B.; Ordonez-Sanchez, S.; Facq, J.V.; Germain, G.; Johnstone, C.; Santic, I.; Salvatore, F.; Davey, T.; Old, C.; et al. Tidal energy round robin tests: A comparison of flow measurements and turbine loading. J. Mar. Sci. Eng. 2021, 9, 425. [Google Scholar] [CrossRef]
- Judge, F.M.; Lyden, E.; O’Shea, M.; Flannery, B.; Murphy, J. Uncertainty in Wave Basin Testing of a Fixed Oscillating Water Column Wave Energy Converter. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2021, 4, 040902. [Google Scholar] [CrossRef]
- Ohana, J.; Gueydon, S.; Judge, F.; Haquin, S.; Weber, M.; Lyden, E.; Thiebaut, F.; O’Shea, M.; Murphy, J.; Davey, T.; et al. Round robin tests on a hinged raft wave energy converter. EWTEC 2021. [Google Scholar]
- Gueydon, S. Effects of Variations on the Experimental Set-Up on the Motion Response of a Floating Wind Semisubmersible (OC4 Type). In Proceedings of the ASME 2019 2nd International Offshore Wind Technical Conference, St. Julian’s, Malta, 3–6 November 2019; Volume 59353, p. V001T01A020. [Google Scholar]
- Sandner, F.; Wie, Y.; Matha, D.; Grela, E.; Azcona, J.; Munduate, X.; Voutsinas, S.; Natarajan, A. INNWIND.EU Deliverable 4.3.3—Innovative Concepts for Floating Structures. Technical Report. 2014. Available online: http://www.innwind.eu/publications/deliverable-reports (accessed on 8 September 2021).
- Det Norske Veritas AS. DNV-RP-C205 Environmental Conditions and Environmental Loads; DNV GL: Høvik, Norway, 2014; Volume 15, p. 2018. Available online: https://rules.dnvgl.com/docs/pdf/DNV/codes/docs/2014-04/RP-C205.pdf (accessed on 8 September 2021).
- Vegt, J.v.d. Slinger Gedrag van Schepen; KIVI-Lecture on seakeeping, Delft; 1984. [Google Scholar]
- Newman, J.N. Analysis of wave generators and absorbers in basins. Appl. Ocean Res. 2010, 32, 71–82. [Google Scholar] [CrossRef] [Green Version]
- Robertson, A.N.; Jonkman, J.M.; Goupee, A.J.; Coulling, A.J.; Prowell, I.; Browning, J.; Masciola, M.D.; Molta, P. Summary of conclusions and recommendations drawn from the DeepCwind scaled floating offshore wind system test campaign. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013; Volume 55423, p. V008T09A053. [Google Scholar]
- Kvittem, M.I.; Berthelsen, P.A.; Eliassen, L.; Thys, M. Calibration of Hydrodynamic Coefficients for a Semi-Submersible 10 MW Wind Turbine. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar] [CrossRef]
- Bayati, I.; Facchinetti, A.; Fontanella, A.; Taruffi, F.; Belloli, M. Analysis of FOWT dynamics in 2-DOF hybrid HIL wind tunnel experiments. Ocean Eng. 2020, 195, 106717. [Google Scholar] [CrossRef]
- Gueydon, S. Aerodynamic damping on a semisubmersible floating foundation for wind turbines. Energy Procedia 2016, 94, 367–378. [Google Scholar] [CrossRef] [Green Version]
- Gueydon, S.; Lyden, E.; Judge, F.; O’Shea, M. MaRINET 2 Floating Offshore Wind Turbine Test Data Set—UCC; SEANOE, 2021. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infrastructure | Ifremer | ECN | UoS | UCC |
|---|---|---|---|---|
| Tank Name | BDWB | HOET | KHL | DOB |
| Length (m) | 50 | 50 | 76 | 35 |
| Width (m) | 12.5 | 30 | 4.6 | 12 |
| Depth (m) | 9.7 | 5 | 2.0 | 3 |
| Active absorption | No | No | Yes | Yes |
| Wind generation | Yes | Yes | No | No |
| Label | B | A | D | C, E |
| T (s) | H = 0.05 m | H = 0.1 m | H = 0.2 m | H = 0.3 m |
|---|---|---|---|---|
| 0.86 | x | |||
| 1.03 | x | |||
| 1.29 | x | |||
| 1.80 | x | x | ||
| 2.39 | x | x | x | x |
| 2.56 | x | x | x | x |
| 2.71 | x | |||
| 2.74 | x | x | x | x |
| 2.78 | x | x | x | x |
| 2.86 | x | x | x | x |
| 2.94 | x | x | ||
| 3.33 | x | x | x | x |
| 3.45 | x | x | x | x |
| 3.56 | x | x | x | x |
| Spectrum Details | (s) | (m) | Wind Thrust (N) | Details |
|---|---|---|---|---|
| JONSWAP () | 1.29 | 0.05 | 0; 5; 7 | A, B, C, D |
| JONSWAP () | 1.29 | 0.05 | 3; 8 | D |
| JONSWAP () | 1.29 | 0.075 | 0; 7 | A, B, C, D |
| JONSWAP () | 1.29 | 0.075 | 3; 5; 8 | D |
| JONSWAP () | 1.81 | 0.10 | 0; 7 | A, B, C, D |
| JONSWAP () | 1.81 | 0.10 | 5 | A, B, D |
| JONSWAP () | 1.81 | 0.10 | 3 | C |
| JONSWAP () | 1.81 | 0.10 | 3; 8 | D |
| JONSWAP () | 1.81 | 0.15 | 0; 7 | A, B, C, D |
| JONSWAP () | 1.81 | 0.15 | 5 | A, B, D |
| JONSWAP () | 1.81 | 0.15 | 3 | C |
| JONSWAP () | 1.81 | 0.15 | 3; 8 | D |
| JONSWAP () | 2.58 | 0.10 | 0 | A, B, C, D |
| JONSWAP () | 2.58 | 0.10 | 3; 5; 7; 8 | D |
| JONSWAP () | 2.58 | 0.15 | 0 | A, B, C, D |
| JONSWAP () | 2.58 | 0.15 | 3; 5; 7; 8 | D |
| JONSWAP () | 2.58 | 0.20 | 0 | A, B, C, D |
| JONSWAP () | 2.58 | 0.20 | 3; 5; 7; 8 | D |
| Pink noise | 0; 3; 5; 7; 8 | D, E |
| Infrastructure | A | B | C | D | E |
|---|---|---|---|---|---|
| Mass (kg) | 117.7 | 120.3 | 118 | 117.6 | 117.7 |
| Draft (m) | 0.425 | 0.425 | 0.425 | 0.425 | 0.425 |
| CoG location (m) | 0.210 | 0.220 | 0.220 | 0.225 | 0.220 |
| Gyration radius around x-axis (m) | 0.59 | 0.59 | 0.63 | 0.59 | n.a. |
| Gyration radius around y-axis (m) | 0.62 | 0.62 | 0.65 | 0.61 | n.a. |
| Azimuth angle between side lines (deg) | 120 | 120 | 120 | 59 | 120 |
| Global surge stiffness (N/m) | n.a. | 19.2 | 21.1 | 32.1 | n.a. |
| Motion Mode | Surge | Heave | Pitch |
|---|---|---|---|
| JONSWAP s | LF | LF | LF |
| JONSWAP s | LF | WF | LF |
| JONSWAP s | LF | WF | WF |
| Pink-Noise | LF | WF | WF |
| (Max-Min)/Mean (%) | A | B | C | A+B+C |
|---|---|---|---|---|
| 4.0 | 9.0 | 2.2 | 26.3 | |
| 1.0 | 2.1 | 1.4 | 3.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gueydon, S.; Judge, F.M.; O’Shea, M.; Lyden, E.; Le Boulluec, M.; Caverne, J.; Ohana, J.; Kim, S.; Bouscasse, B.; Thiebaut, F.; et al. Round Robin Laboratory Testing of a Scaled 10 MW Floating Horizontal Axis Wind Turbine. J. Mar. Sci. Eng. 2021, 9, 988. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9090988
Gueydon S, Judge FM, O’Shea M, Lyden E, Le Boulluec M, Caverne J, Ohana J, Kim S, Bouscasse B, Thiebaut F, et al. Round Robin Laboratory Testing of a Scaled 10 MW Floating Horizontal Axis Wind Turbine. Journal of Marine Science and Engineering. 2021; 9(9):988. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9090988
Chicago/Turabian StyleGueydon, Sebastien, Frances M. Judge, Michael O’Shea, Eoin Lyden, Marc Le Boulluec, Julien Caverne, Jérémy Ohana, Shinwoong Kim, Benjamin Bouscasse, Florent Thiebaut, and et al. 2021. "Round Robin Laboratory Testing of a Scaled 10 MW Floating Horizontal Axis Wind Turbine" Journal of Marine Science and Engineering 9, no. 9: 988. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9090988