
Video-Based Deep Learning Approach for 3D Human Movement Analysis in Institutional Hallways: A Smart Hallway



Abstract
:1. Introduction
2. Materials and Methods
2.1. System Design Requirements
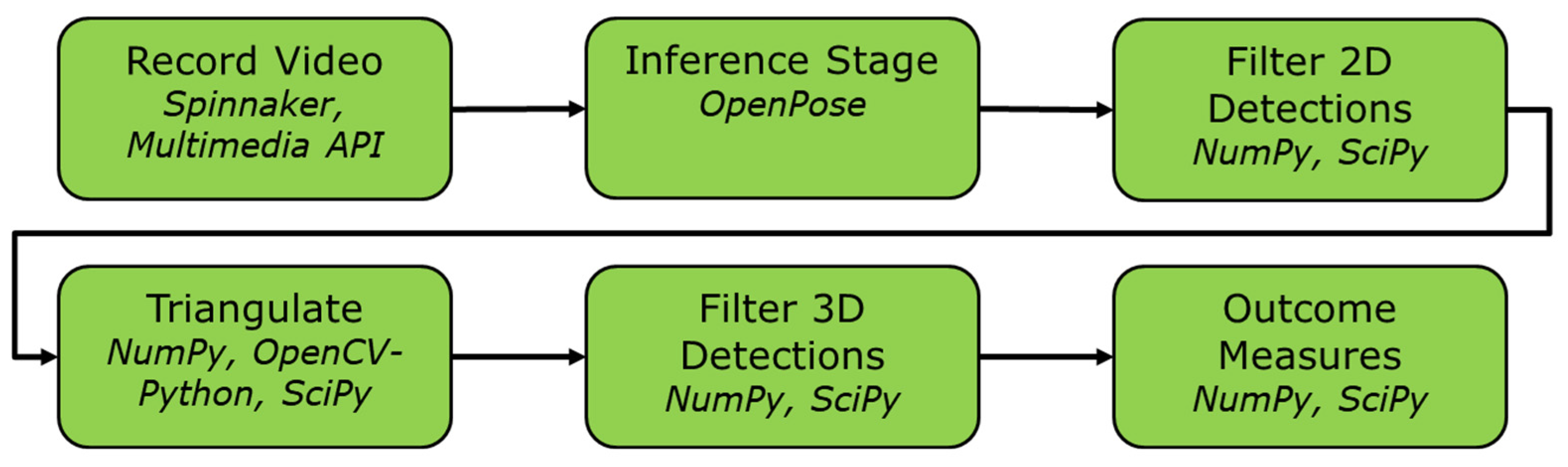
2.2. System Design
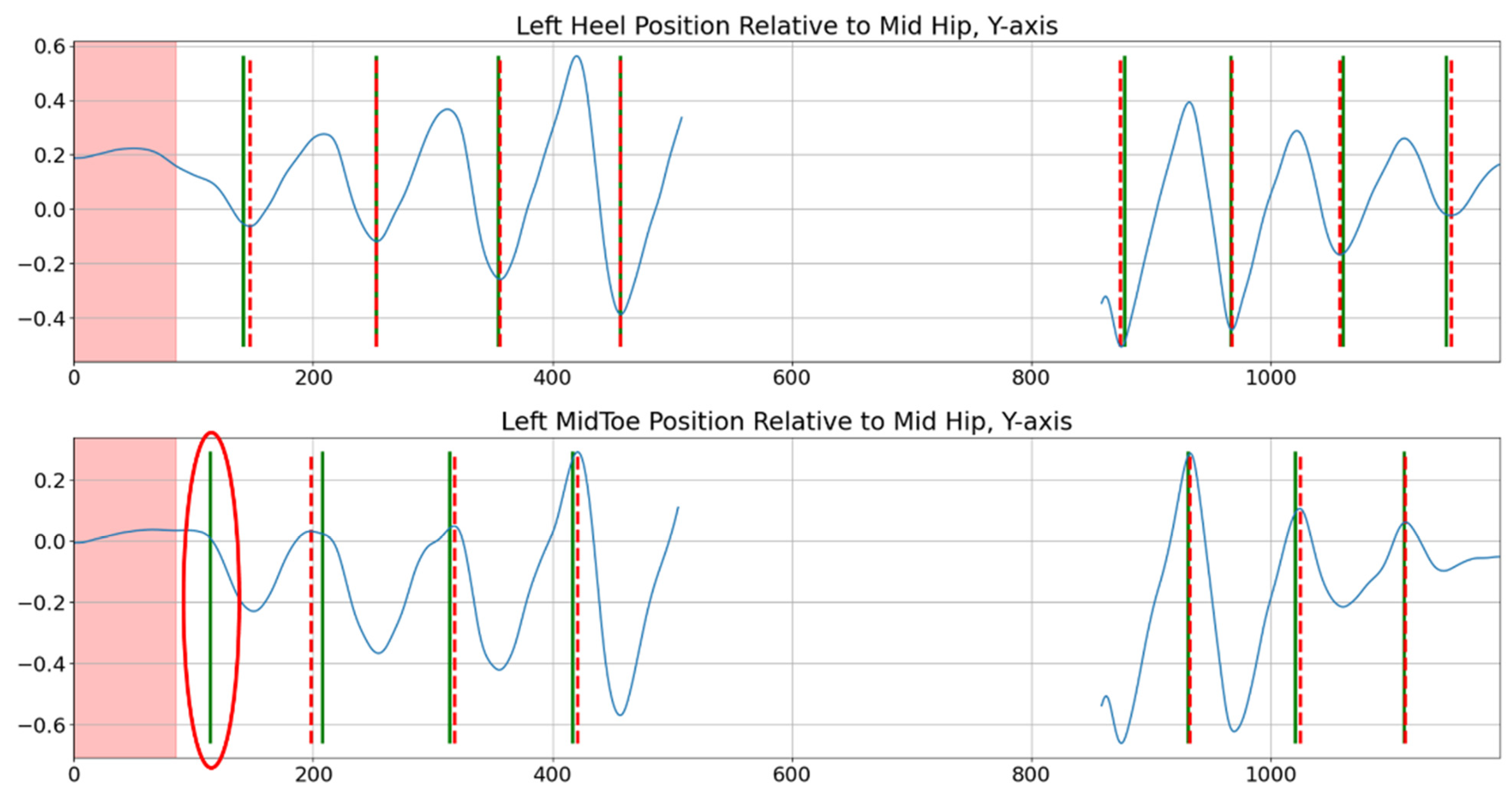
2.3. Signal Processing
| Algorithms 1 Method for detecting stops in a trial given an array of chest keypoint position per frame. Detect Stops. | |
| 0 | Get first derivative of keypoints in chest keypoint array, AC, smooth the array with a low-pass filter |
| 1 | get net average velocity of keypoints in the array VN |
| 2 | set current stopped state to False |
| 3 | for index, point in AC |
| 4 | create a sliding window on AC of size K |
| 5 | get average velocity of the window VW |
| 6 | if VW less than VN * scalar and current state is not stopped |
| 7 | current stop append frame index |
| 8 | stopped state to True |
| 9 | else if VW greater than VN * scalar and current state is stopped |
| 10 | current stop append frame index → S |
| 11 | S appended to SN, current stop S set to empty list |
| 12 | stopped state to False |
| 13 | else pass |
| 14 | end |
| 15 | Return list of stops SN |
| Algorithm 2 Method for detecting foot strikes during gait initiation and gait termination. Detect Foot Strikes. | |
| 0 | create an empty event displacement array E ← [empty] |
| 1 | for index, point in foot/heel keypoint array, AK |
| 2 | get heel keypoint displacement relative to the bottom chest keypoint |
| 3 | append the displacement data to E |
| 4 | smooth E with a low-pass filter |
| 5 | fine detect initial peaks in E as foot strikes FS |
| 6 | pass E, FS, and list of stop windows WL to initiation/termination recovery method |
| 7 | for W in WL |
| 8 | coarse detect peaks from E index 0 to start index of W |
| 9 | select the last detected peak as a potential gait termination strike PS |
| 10 | create window between the last detected strike in FS r and PS |
| 11 | if last detected strike is equal to potential gait termination |
| 12 | Return is termination False |
| 13 | else |
| 14 | check concavity of the displacement data inside the newly constructed window W |
| 15 | construct a line L from the start to the end of W |
| 16 | determine the linear fit between the data inside W and L |
| 17 | if linear fit is less than threshold |
| 18 | Return is termination False |
| 19 | Return is termination True → PS inserted in FS |
2.4. Validation
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
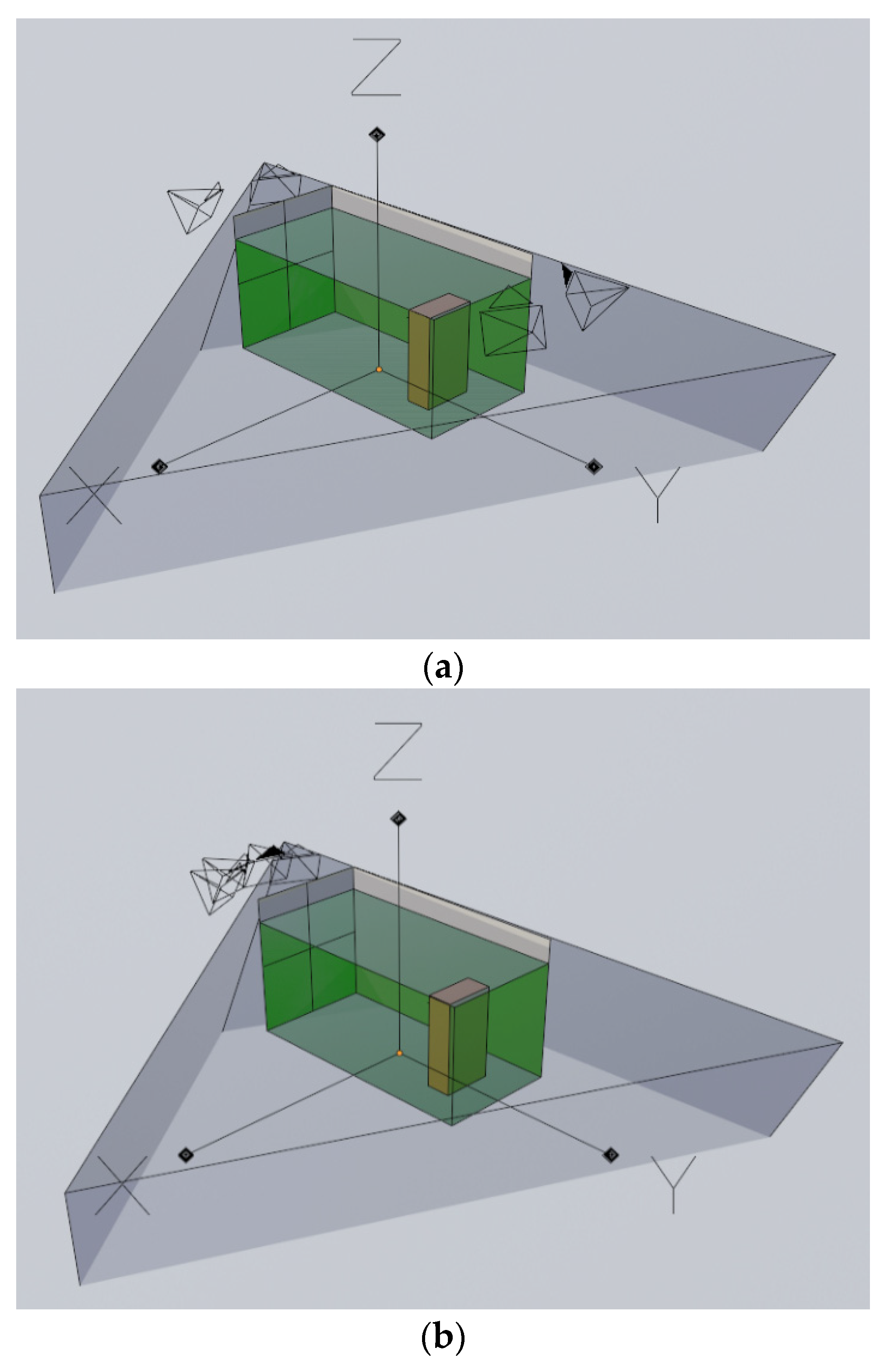
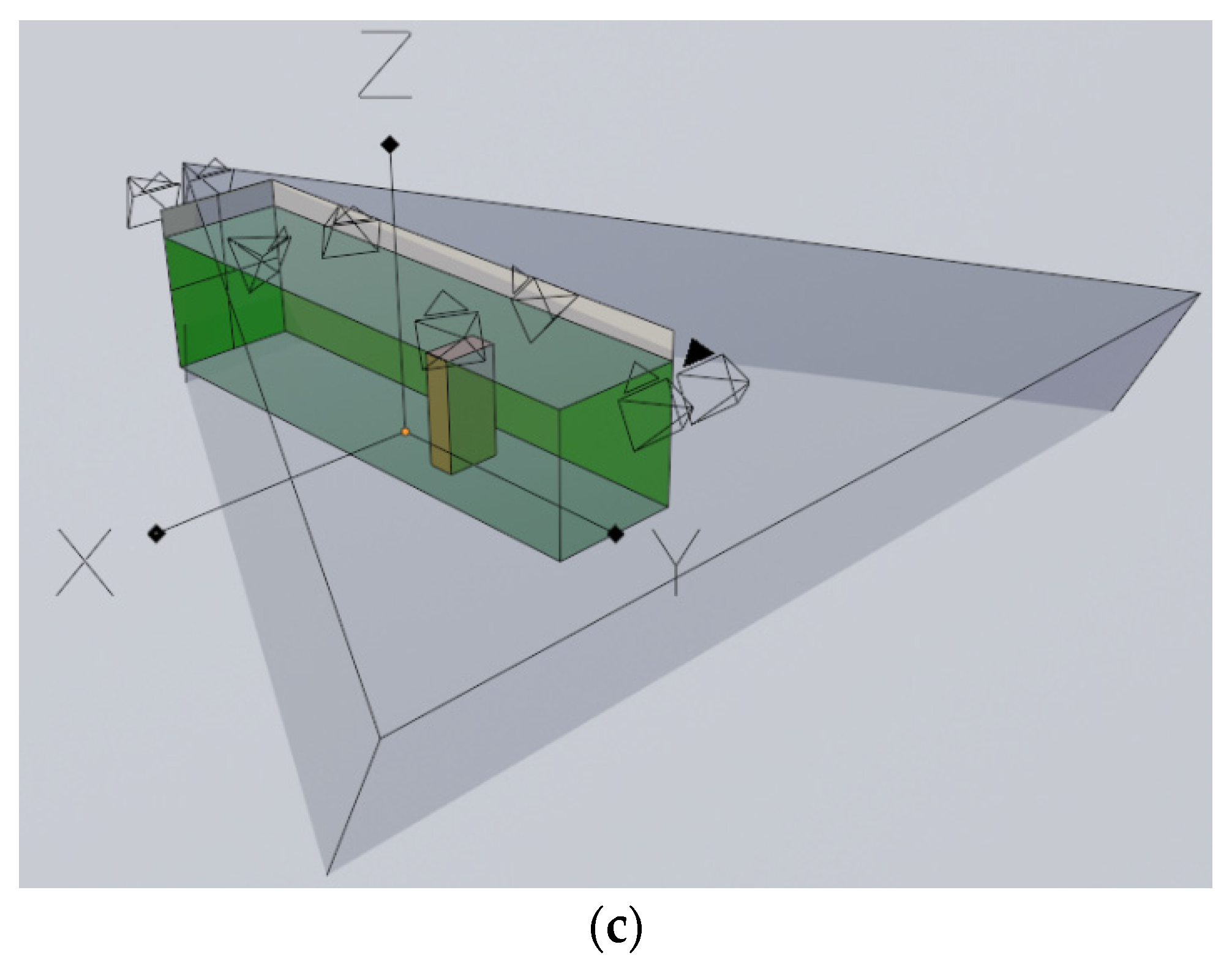
Appendix A. Simulation and Modelling
Appendix A.1. Methods



Appendix A.2. Validation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Cameras | Layout | Pitch Angle Variation (°) | Total Capture Volume (m3) | Ground-Coverage Area (m2) |
|---|---|---|---|---|
| 4 | Arc | Rx = [60°: 65°] Ry = 0° Rz = ±[12.5°, 25.0°] | 34 (Rx = 65°) 31 (Rx = 62.5°) 29 (Rx = 60°) | 10 (Rx = 65°) 11 (Rx = 62.5°) 11 (Rx = 60°) |
| 4 | Corner | Rx = [60°: 65°] Ry = 0° Rz = ±25.0° | 33 (Rx = 65°) 30 (Rx = 62.5°) 28 (Rx = 60°) | 8 (Rx = 65°) 10 (Rx = 62.5°) 11 (Rx = 60°) |
| 8 | Perimeter | Rx = [62.5°, 65°] Ry = 0° Rz = ±[12.5°, 25.0°] | 61 (Rx = 62.5°) | 20 (Rx = 62.5°) |

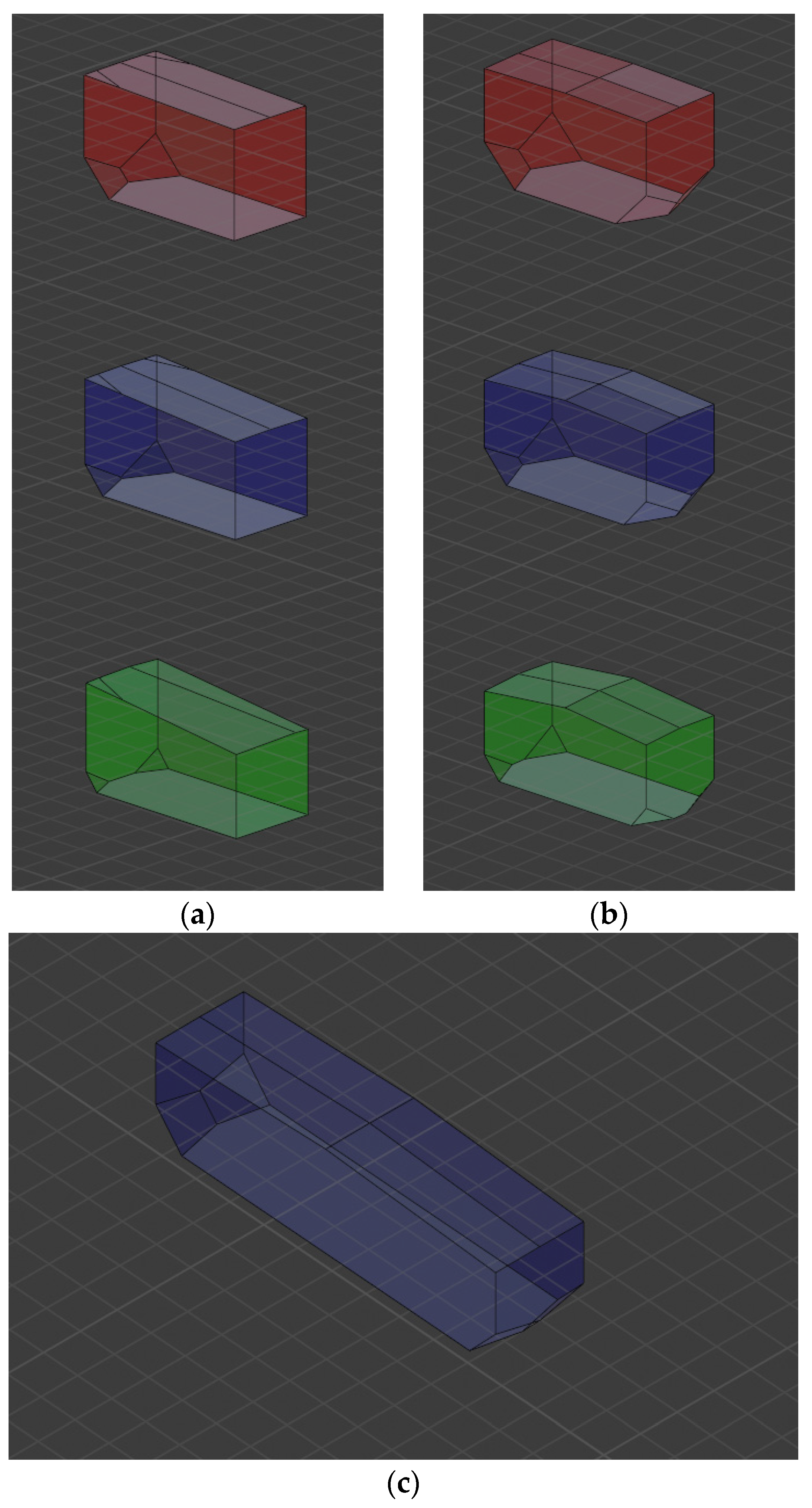
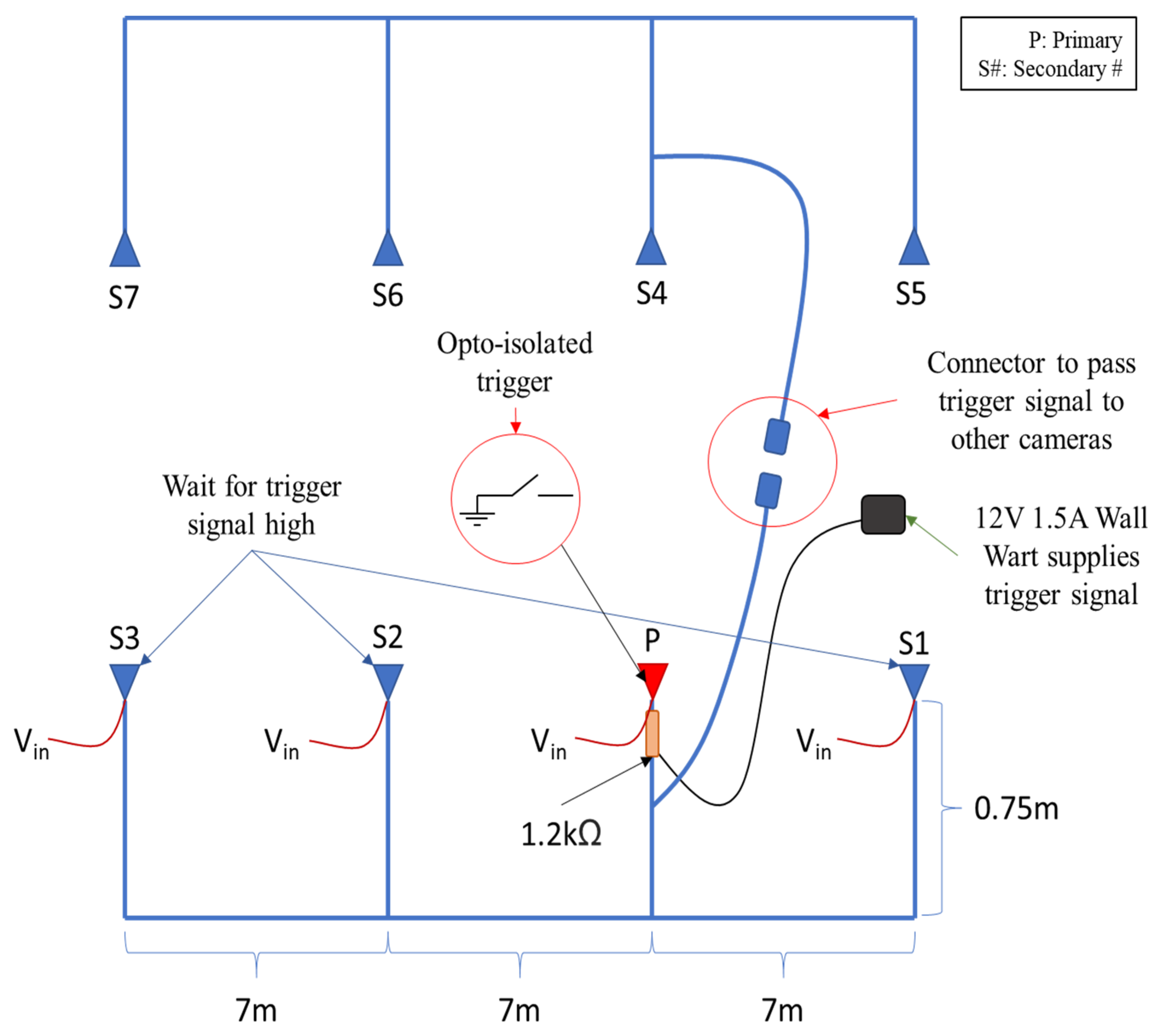
Appendix B. Camera Synchronization
Appendix B.1. Methods


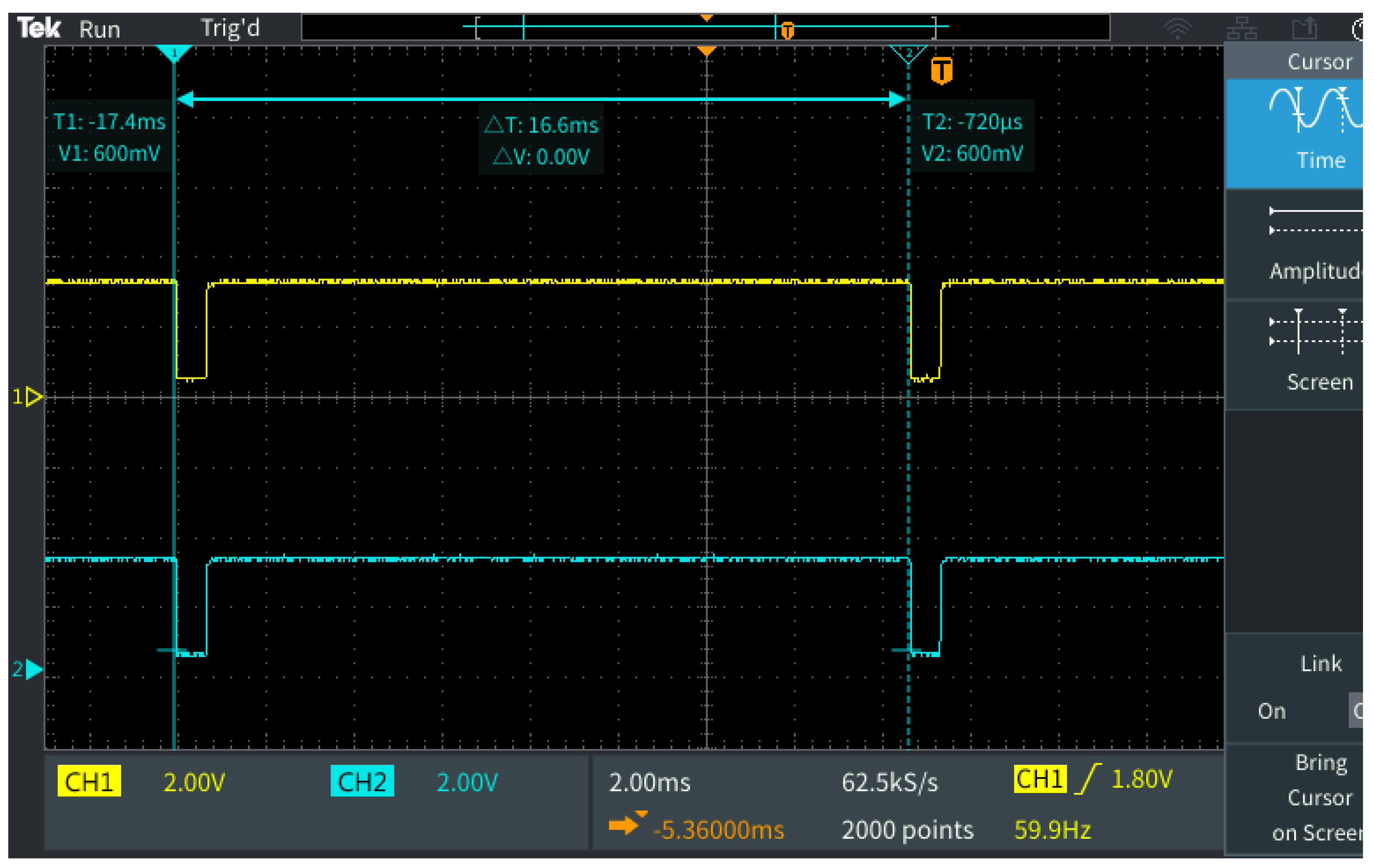
Appendix B.2. Validation
| Pull-Up Resistor (kΩ) | Number of Cameras | Current Steady State (mA) | Current Active (mA) | Current Active (mA/Camera) | Trigger Success |
|---|---|---|---|---|---|
| 2.4 | 2 | 4.73 | 3.01 | 1.55 | Yes |
| 3 | 4.74 | 4.23 | 1.41 | No | |
| 4 | 4.74 | 4.37 | 1.09 | No | |
| 1.2 | 2 | 9.06 | 3.56 | 1.78 | Yes |
| 3 | 9.07 | 6.15 | 2.05 | Yes | |
| 4 | 9.08 | 7.84 | 1.96 | Yes | |
| 0.6 | 6 | 18.10 | 11.88 | 1.98 | Yes |
| 8 | 18.11 | 15.44 | 1.93 | Yes |


| Image Timing Characteristics, Δ (μs) | |||||
|---|---|---|---|---|---|
| Camera | μ | σ | σ2 | Max Δ | Min Δ |
| 20023229 | 0.00 | 0.39 | 0.16 | 4.00 | −3.00 |
| 20010192 | 0.00 | 0.39 | 0.15 | 5.00 | −5.00 |
| 20010190 | 0.04 | 0.56 | 0.32 | 5.00 | −4.00 |
| 20010189 | 0.02 | 0.50 | 0.25 | 4.00 | −5.00 |
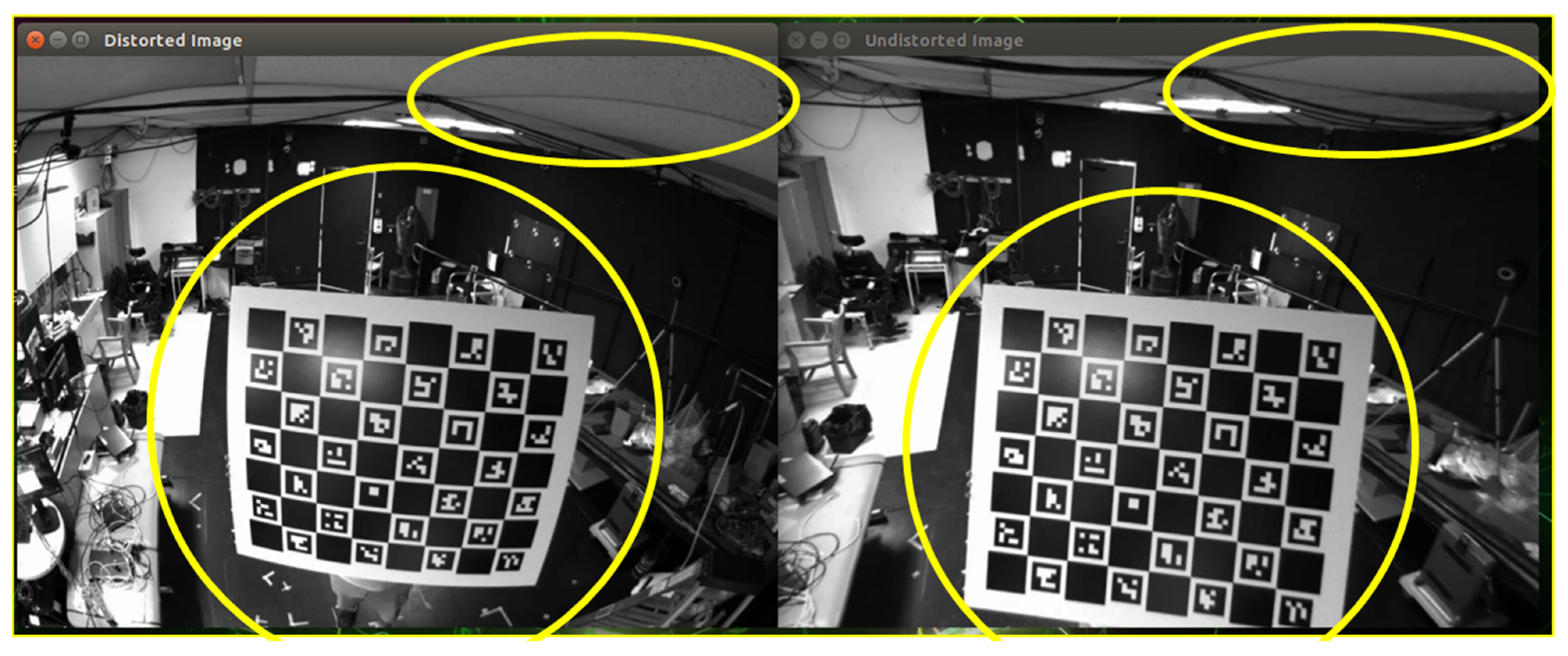
Appendix C. System Calibration
Appendix C.1. Methods
Appendix C.2. Validation


| Camera ID | Intrinsic Reprojection Error (Pixels) |
|---|---|
| 20010190 | 0.64 |
| 20023191 | 0.52 |
| 20023230 | 0.51 |
| 20023235 | 0.48 |
Appendix D
| Walking Straight | Walking Turn | Walking Curve | ||||
|---|---|---|---|---|---|---|
| Limb Segment (cm) | SH | Delta | SH | Delta | SH | Delta |
| Left Arm | 29.27 (1.69) | 1.77 (1.69) | 29.19 (1.36) | 1.69 (1.36) | 29.10 (1.40) | 1.60 (1.40) |
| Left Forearm | 27.56 (3.22) | 0.56 (3.22) | 25.97 (2.88) | −1.03 (2.88) | 26.29 (1.82) | −0.71 (1.82) |
| Right Arm | 30.19 (3.80) | 2.69 (3.80) | 28.80 (1.62) | 1.30 (1.62) | 29.17 (1.20) | 1.67 (1.20) |
| Right Forearm | 26.68 (2.90) | −0.32 (2.90) | 25.94 (2.84) | −1.06 (2.84) | 25.54 (1.73) | −1.46 (1.73) |
| Left Thigh | 41.54 (2.44) | −2.46 (2.44) | 41.65 (2.85) | −2.35 (2.85) | 40.94 (1.94) | −3.06 (1.94) |
| Left Shank | 42.49 (3.81) | 0.99 (3.81) | 42.66 (3.34) | 1.16 (3.34) | 42.98 (2.92) | 1.48 (2.92) |
| Right Thigh | 41.87 (3.09) | −2.63 (3.09) | 41.43 (2.50) | −3.07 (2.50) | 41.12 (2.00) | −3.38 (2.00) |
| Right Shank | 41.75 (4.09) | 0.25 (4.09) | 42.51 (3.70) | 1.01 (3.70) | 42.13 (3.02) | 0.63 (3.02) |
| Left Ankle to Heel | 7.67 (2.54) | −0.33 (2.54) | 7.02 (2.26) | −0.98 (2.26) | 7.00 (1.88) | −1.00 (1.88) |
| Left Ankle to Big Toe | 16.06 (4.26) | −3.44 (4.26) | 16.63 (4.60) | −2.87 (4.60) | 17.10 (3.13) | −2.40 (3.13) |
| Left Ankle to Small Toe | 14.38 (3.90) | −2.12 (3.90) | 15.96 (4.06) | −0.54 (4.06) | 16.00 (3.47) | −0.50 (3.47) |
| Left Toe Width | 7.05 (2.46) | −1.95 (2.46) | 8.00 (3.27) | −1.00 (3.27) | 7.05 (2.58) | −1.95 (2.58) |
| Right Ankle to Heel | 7.20 (3.33) | -0.80 (3.33) | 7.36 (2.21) | −0.64 (2.21) | 10.50 (4.47) | 2.50 (4.47) |
| Right Ankle to Big Toe | 17.09 (3.67) | −2.91 (3.67) | 16.98 (4.04) | −3.02 (4.04) | 17.24 (2.82) | −2.76 (2.82) |
| Right Ankle to Small Toe | 15.68 (3.80) | −0.82 (3.80) | 14.56 (3.16) | −1.94 (3.16) | 15.20 (2.66) | −1.30 (2.66) |
| Right Toe Width | 7.29 (2.58) | −1.21 (2.58) | 8.90 (3.41) | 0.40 (3.41) | 7.76 (3.89) | −0.74 (3.89) |
| Shoulder Width | 33.18 (1.46) | −0.82 (1.46) | 32.50 (1.24) | −1.50 (1.24) | 32.67 (1.61) | −1.33 (1.61) |
| Hip Width | 20.71 (1.28) | −0.29 (1.28) | 20.83 (1.46) | −0.17 (1.46) | 20.93 (1.89) | −0.07 (1.89) |
| Chest Height | 52.93 (1.34) | −3.07 (1.34) | 52.32 (1.72) | −3.68 (1.72) | 53.26 (1.39) | −2.74 (1.39) |
| Walking Straight | Cane | Walker | ||||
|---|---|---|---|---|---|---|
| Limb Segment (cm) | SH | Delta | SH | Delta | SH | Delta |
| Left Arm | 29.27 (1.69) | 1.77 (1.69) | 29.42 (1.72) | 1.92 (1.72) | 29.09 (1.60) | 1.59 (1.60) |
| Left Forearm | 27.56 (3.22) | 0.56 (3.22) | 26.31 (1.57) | −0.69 (1.57) | 28.88 (3.90) | 1.88 (3.90) |
| Right Arm | 30.19 (3.80) | 2.69 (3.80) | 29.60 (1.90) | 2.10 (1.90) | 29.42 (1.98) | 1.92 (1.98) |
| Right Forearm | 26.68 (2.90) | −0.32 (2.90) | 27.42 (3.64) | 0.42 (3.64) | 28.02 (3.55) | 1.02 (3.55) |
| Left Thigh | 41.54 (2.44) | −2.46 (2.44) | 40.75 (2.48) | −3.25 (2.48) | 41.44 (3.09) | −2.56 (3.09) |
| Left Shank | 42.49 (3.81) | 0.99 (3.81) | 42.38 (2.97) | 0.88 (2.97) | 43.56 (3.39) | 2.06 (3.39) |
| Right Thigh | 41.87 (3.09) | −2.63 (3.09) | 41.26 (3.15) | −3.24 (3.15) | 40.89 (3.03) | −3.61 (3.03) |
| Right Shank | 41.75 (4.09) | 0.25 (4.09) | 41.85 (3.52) | 0.35 (3.52) | 42.93 (3.53) | 1.43 (3.53) |
| Left Ankle to Heel | 7.67 (2.54) | −0.33 (2.54) | 7.08 (2.21) | −0.92 (2.21) | 6.80 (2.21) | −1.20 (2.21) |
| Left Ankle to Big Toe | 16.06 (4.26) | −3.44 (4.26) | 17.59 (4.52) | −1.91 (4.52) | 15.67 (3.68) | −3.83 (3.68) |
| Left Ankle to Small Toe | 14.38 (3.90) | −2.12 (3.90) | 15.27 (4.39) | −1.23 (4.39) | 13.31 (4.15) | −3.19 (4.15) |
| Left Toe Width | 7.05 (2.46) | −1.95 (2.46) | 6.96 (2.62) | −2.04 (2.62) | 7.53 (2.64) | −1.47 (2.64) |
| Right Ankle to Heel | 7.20 (3.33) | −0.80 (3.33) | 6.13 (2.08) | −1.87 (2.08) | 7.09 (2.44) | −0.91 (2.44) |
| Right Ankle to Big Toe | 17.09 (3.67) | −2.91 (3.67) | 16.84 (4.34) | −3.16 (4.34) | 17.09 (3.86) | −2.91 (3.86) |
| Right Ankle to Small Toe | 15.68 (3.80) | −0.82 (3.80) | 14.57 (3.60) | −1.93 (3.60) | 14.75 (3.59) | −1.75 (3.59) |
| Right Toe Width | 7.29 (2.58) | −1.21 (2.58) | 7.70 (2.87) | −0.80 (2.87) | 7.73 (2.75) | −0.77 (2.75) |
| Shoulder Width | 33.18 (1.46) | −0.82 (1.46) | 33.62 (2.07) | −0.38 (2.07) | 33.57 (1.84) | −0.43 (1.84) |
| Hip Width | 20.71 (1.28) | −0.29 (1.28) | 20.58 (1.51) | −0.42 (1.51) | 20.63 (1.21) | −0.37 (1.21) |
| Chest Height | 52.93 (1.34) | −3.07 (1.34) | 52.56 (1.15) | −3.44 (1.15) | 54.13 (2.43) | −1.87 (2.43) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.48 (0.15) | 1.50 (0.13) | 0.01 (0.07) | 1.48 (0.17) | 1.47 (0.15) | −0.01 (0.08) |
| Stride time (s) | 1.13 (0.08) | 1.14 (0.07) | 0.01 (0.03) | 1.18 (0.21) | 1.17 (0.19) | −0.01 (0.05) |
| Stride speed (m/s) | 1.31 (0.16) | 1.32 (0.15) | 0.00 (0.04) | 1.26 (0.17) | 1.26 (0.17) | 0.00 (0.03) |
| Step length (m) | 0.45 (0.15) | 0.32 (0.12) | −0.14 (0.05) | 0.45 (0.17) | 0.35 (0.13) | −0.10 (0.06) |
| Step width (m) | 0.07 (0.04) | 0.08 (0.04) | 0.01 (0.00) | 0.08 (0.04) | 0.09 (0.03) | 0.01 (0.02) |
| Step time (s) | 0.59 (0.11) | 0.58 (0.08) | −0.01 (0.05) | 0.57 (0.05) | 0.57 (0.05) | 0.01 (0.04) |
| Cadence (steps/min) | 101.94 (8.36) | 103.40 (5.93) | 1.46 (4.14) | 103.68 (13.56) | 103.83 (13.47) | 0.14 (4.55) |
| Stance time (s) | 0.69 (0.05) | 0.74 (0.07) | 0.05 (0.06) | 0.70 (0.07) | 0.72 (0.04) | 0.02 (0.06) |
| Swing time (s) | 0.45 (0.06) | 0.42 (0.02) | −0.03 (0.06) | 0.48 (0.08) | 0.42 (0.03) | −0.06 (0.07) |
| Stance swing ratio (NA) | 1.53 (0.19) | 1.75 (0.11) | 0.22 (0.25) | 1.47 (0.28) | 1.71 (0.10) | 0.24 (0.29) |
| Double support time (s) | 0.12 (0.03) | 0.16 (0.04) | 0.04 (0.05) | 0.13 (0.05) | 0.16 (0.04) | 0.03 (0.06) |
| Foot angle (°) | 12.63 (6.90) | 12.45 (6.97) | −0.18 (0.07) | 21.15 (9.33) | 20.33 (8.49) | −0.81 (2.02) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | Measured | Ground Truth | Delta | Measured | Ground Truth | Delta |
| Stride length (m) | 1.56 (0.20) | 1.54 (0.19) | −0.02 (0.08) | 1.55 (0.21) | 1.53 (0.24) | −0.02 (0.10) |
| Stride time (s) | 1.05 (0.10) | 1.03 (0.10) | −0.02 (0.08) | 1.04 (0.07) | 1.04 (0.08) | 0.00 (0.05) |
| Stride speed (m/s) | 1.45 (0.24) | 1.47 (0.20) | 0.02 (0.05) | 1.51 (0.22) | 1.49 (0.22) | −0.02 (0.05) |
| Step length (m) | 0.40 (0.13) | 0.35 (0.12) | −0.05 (0.04) | 0.41 (0.13) | 0.37 (0.12) | −0.04 (0.04) |
| Step width (m) | 0.08 (0.05) | 0.09 (0.05) | 0.01 (0.03) | 0.11 (0.05) | 0.12 (0.05) | 0.01 (0.02) |
| Step time (s) | 0.54 (0.13) | 0.53 (0.13) | 0.00 (0.08) | 0.52 (0.09) | 0.51 (0.07) | −0.01 (0.07) |
| Cadence (steps/min) | 109.03 (7.18) | 109.67 (7.33) | 0.64 (4.73) | 112.03 (2.41) | 112.92 (3.49) | 0.89 (4.79) |
| Stance time (s) | 0.62 (0.10) | 0.62 (0.09) | 0.00 (0.07) | 0.62 (0.10) | 0.62 (0.09) | 0.00 (0.07) |
| Swing time (s) | 0.42 (0.08) | 0.40 (0.07) | −0.02 (0.10) | 0.42 (0.08) | 0.40 (0.07) | −0.02 (0.10) |
| Stance swing ratio (NA) | 1.54 (0.53) | 1.56 (0.32) | 0.02 (0.57) | 1.54 (0.53) | 1.56 (0.32) | 0.02 (0.57) |
| Double support time (s) | 0.12 (0.13) | 0.14 (0.11) | 0.01 (0.05) | 0.13 (0.13) | 0.14 (0.11) | 0.01 (0.05) |
| Foot angle (°) | 14.21 (6.84) | 13.95 (6.87) | −0.26 (1.65) | 14.21 (6.84) | 13.95 (6.87) | −0.26 (1.65) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | Measured | Ground Truth | Delta | Measured | Ground Truth | Delta |
| Stride length (m) | 1.36 (0.23) | 1.37 (0.16) | 0.02 (0.12) | 1.27 (0.20) | 1.26 (0.19) | −0.01 (0.12) |
| Stride time (s) | 1.03 (0.10) | 1.04 (0.06) | 0.01 (0.06) | 1.06 (0.07) | 1.05 (0.05) | −0.01 (0.05) |
| Stride speed (m/s) | 1.31 (0.15) | 1.32 (0.13) | 0.01 (0.06) | 1.22 (0.12) | 1.22 (0.11) | 0.00 (0.04) |
| Step length (m) | 0.37 (0.12) | 0.27 (0.10) | −0.09 (0.05) | 0.35 (0.18) | 0.28 (0.14) | −0.07 (0.05) |
| Step width (m) | 0.27 (0.15) | 0.22 (0.14) | −0.05 (0.07) | 0.31 (0.18) | 0.27 (0.15) | −0.04 (0.04) |
| Step time (s) | 0.51 (0.10) | 0.50 (0.07) | −0.01 (0.06) | 0.53 (0.05) | 0.54 (0.05) | 0.01 (0.05) |
| Cadence (steps/min) | 115.62 (9.07) | 118.48 (7.58) | 2.85 (7.42) | 110.18 (8.01) | 110.78 (5.57) | 0.59 (5.09) |
| Stance time (s) | 0.62 (0.08) | 0.65 (0.04) | 0.04 (0.06) | 0.64 (0.06) | 0.65 (0.05) | 0.01 (0.04) |
| Swing time (s) | 0.41 (0.08) | 0.39 (0.05) | −0.03 (0.05) | 0.43 (0.09) | 0.41 (0.05) | −0.02 (0.06) |
| Stance swing ratio (NA) | 1.48 (0.31) | 1.64 (0.12) | 0.16 (0.28) | 1.46 (0.37) | 1.58 (0.24) | 0.12 (0.22) |
| Double support time (s) | 0.12 (0.05) | 0.13 (0.03) | 0.01 (0.05) | 0.11 (0.04) | 0.12 (0.02) | 0.01 (0.04) |
| Foot angle (°) | 35.63 (17.17) | 37.41 (17.72) | 1.77 (3.14) | 34.81 (18.50) | 36.20 (18.90) | 1.38 (3.08) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | Measured | Ground Truth | Delta | Measured | Ground Truth | Delta |
| Stride length (m) | 1.65 (0.19) | 1.64 (0.20) | −0.01 (0.05) | 1.68 (0.20) | 1.70 (0.18) | 0.02 (0.10) |
| Stride time (s) | 1.58 (0.10) | 1.56 (0.12) | −0.02 (0.06) | 1.58 (0.08) | 1.58 (0.09) | 0.00 (0.05) |
| Stride speed (m/s) | 1.05 (0.11) | 1.05 (0.11) | 0.00 (0.01) | 1.09 (0.11) | 1.09 (0.11) | −0.01 (0.02) |
| Step length (m) | 0.47 (0.20) | 0.46 (0.20) | −0.01 (0.03) | 0.54 (0.16) | 0.49 (0.15) | -0.06 (0.04) |
| Step width (m) | 0.06 (0.03) | 0.06 (0.03) | 0.00 (0.01) | 0.08 (0.03) | 0.08 (0.03) | 0.00 (0.01) |
| Step time (s) | 0.75 (0.07) | 0.79 (0.07) | 0.04 (0.05) | 0.82 (0.09) | 0.77 (0.09) | −0.05 (0.07) |
| Cadence (steps/min) | 80.48 (7.55) | 77.32 (5.83) | −3.16 (4.63) | 73.37 (5.79) | 78.08 (6.17) | 4.70 (5.13) |
| Stance time (s) | 0.95 (0.07) | 0.92 (0.06) | −0.03 (0.08) | 0.93 (0.09) | 0.96 (0.07) | 0.03 (0.07) |
| Swing time (s) | 0.63 (0.09) | 0.63 (0.09) | 0.00 (0.08) | 0.65 (0.09) | 0.59 (0.08) | −0.05 (0.07) |
| Stance swing ratio (NA) | 1.51 (0.21) | 1.44 (0.16) | −0.07 (0.19) | 1.45 (0.21) | 1.64 (0.21) | 0.18 (0.28) |
| Double support time (s) | 0.18 (0.07) | 0.18 (0.03) | −0.01 (0.07) | 0.13 (0.05) | 0.14 (0.03) | 0.01 (0.05) |
| Foot angle (°) | 13.50 (7.01) | 13.40 (7.01) | −0.10 (0.57) | 15.22 (3.39) | 14.92 (3.80) | −0.30 (1.13) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | Measured | Ground Truth | Delta | Measured | Ground Truth | Delta |
| Stride length (m) | 1.01 (0.22) | 1.01 (0.23) | 0.00 (0.06) | 1.02 (0.20) | 1.01 (0.19) | −0.01 (0.06) |
| Stride time (s) | 1.78 (0.13) | 1.79 (0.14) | 0.00 (0.10) | 1.81 (0.18) | 1.80 (0.14) | −0.01 (0.08) |
| Stride speed (m/s) | 0.57 (0.13) | 0.57 (0.13) | 0.00 (0.01) | 0.57 (0.13) | 0.57 (0.13) | 0.00 (0.01) |
| Step length (m) | 0.33 (0.15) | 0.30 (0.16) | −0.03 (0.04) | 0.30 (0.15) | 0.29 (0.16) | −0.02 (0.03) |
| Step width (m) | 0.06 (0.04) | 0.07 (0.04) | 0.01 (0.01) | 0.11 (0.04) | 0.11 (0.04) | 0.00 (0.01) |
| Step time (s) | 0.90 (0.18) | 0.88 (0.16) | −0.02 (0.08) | 0.91 (0.13) | 0.92 (0.14) | 0.01 (0.07) |
| Cadence (steps/min) | 66.09 (8.17) | 68.15 (7.68) | 2.06 (2.42) | 66.81 (7.72) | 66.13 (7.58) | −0.68 (4.17) |
| Stance time (s) | 1.13 (0.10) | 1.20 (0.12) | 0.06 (0.12) | 1.16 (0.14) | 1.20 (0.11) | 0.04 (0.09) |
| Swing time (s) | 0.67 (0.13) | 0.59 (0.09) | −0.08 (0.12) | 0.63 (0.09) | 0.59 (0.07) | −0.04 (0.09) |
| Stance swing ratio (NA) | 1.70 (0.28) | 1.94 (0.24) | 0.24 (0.39) | 1.84 (0.31) | 1.99 (0.23) | 0.15 (-0.08) |
| Double support time (s) | 0.23 (0.08) | 0.29 (0.07) | 0.06 (0.10) | 0.25 (0.10) | 0.31 (0.09) | 0.06 (0.13) |
| Foot angle (°) | 14.55 (5.73) | 14.60 (5.84) | 0.06 (0.78) | 15.25 (4.82) | 15.25 (4.76) | 0.01 (2.88) |

References
- Anishchenko, L. Machine learning in video surveillance for fall detection. In Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT); IEEE: Manhattan, NY, USA, 2018; pp. 99–102. [Google Scholar] [CrossRef]
- Jenpoomjai, P.; Wosri, P.; Ruengittinun, S.; Hu, C.-L.; Chootong, C. VA Algorithm for Elderly’s Falling Detection with 2D-Pose-Estimation. In Proceedings of the 2019 Twelfth International Conference on Ubi-Media Computing (Ubi-Media), Bali, Indonesia, 6–9 August 2019; pp. 236–240. [Google Scholar] [CrossRef]
- Taylor, M.E.; Delbaere, K.; Mikolaizak, A.S.; Lord, S.R.; Close, J.C. Gait parameter risk factors for falls under simple and dual task conditions in cognitively impaired older people. Gait Posture 2013, 37, 126–130. [Google Scholar] [CrossRef]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait Analysis Using Wearable Sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef] [PubMed]
- Viswakumar, A.; Rajagopalan, V.; Ray, T.; Parimi, C. Human Gait Analysis Using OpenPose. In Proceedings of the IEEE International Conference Image Information Processing, Shimla, India, 15–17 November 2019; pp. 310–314. [Google Scholar] [CrossRef]
- O’Connor, C.M.; Thorpe, S.; O’Malley, M.J.; Vaughan, C. Automatic detection of gait events using kinematic data. Gait Posture 2007, 25, 469–474. [Google Scholar] [CrossRef] [PubMed]
- Gutta, V. Development and Validation of a Smart Hallway for Human Stride Analysis Using Marker-Less 3D Depth Sensors. 2020. Available online: https://ruor.uottawa.ca/handle/10393/40266 (accessed on 16 February 2021).
- Solichah, U.; Purnomo, M.H.; Yuniarno, E.M. Marker-less Motion Capture Based on Openpose Model Using Triangulation. In Proceedings of the 2020 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 21–22 July 2021; pp. 217–222. [Google Scholar] [CrossRef]
- Labuguen, R.T.; Negrete, S.B.; Kogami, T.; Ingco, W.E.M.; Shibata, T. Performance Evaluation of Markerless 3D Skeleton Pose Estimates with Pop Dance Motion Sequence. In Proceedings of the 2020 Joint 9th International Conference on Informatics, Electronics & Vision (ICIEV) and 2020 4th International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Shiga, Japan, 1–15 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Rodrigues, T.B.; Catháin, C.; Devine, D.; Moran, K.; O’Connor, N.; Murray, N. An evaluation of a 3D multimodal marker-less motion analysis system. In Proceedings of the 10th ACM Multimedia Systems Conference, Amherst, MA, USA, 18–21 June 2019. [Google Scholar] [CrossRef] [Green Version]
- Nakano, N.; Sakura, T.; Ueda, K.; Omura, L.; Kimura, A.; Iino, Y.; Fukashiro, S.; Yoshioka, S. Evaluation of 3D Markerless Motion Capture Accuracy Using OpenPose With Multiple Video Cameras. Front. Sports Act. Living 2020, 2, 50. [Google Scholar] [CrossRef]
- Tamura, H.; Tanaka, R.; Kawanishi, H. Reliability of a markerless motion capture system to measure the trunk, hip and knee angle during walking on a flatland and a treadmill. J. Biomech. 2020, 109, 109929. [Google Scholar] [CrossRef] [PubMed]
- Stenum, J.; Rossi, C.; Roemmich, R.T. Two-dimensional video-based analysis of human gait using pose estimation. PLoS Comput. Biol. 2021, 17, e1008935. [Google Scholar] [CrossRef]
- Albert, J.A.; Owolabi, V.; Gebel, A.; Brahms, C.M.; Granacher, U.; Arnrich, B. Evaluation of the Pose Tracking Performance of the Azure Kinect and Kinect v2 for Gait Analysis in Comparison with a Gold Standard: A Pilot Study. Sensors 2020, 20, 5104. [Google Scholar] [CrossRef] [PubMed]
- Pasinetti, S.; Nuzzi, C.; Covre, N.; Luchetti, A.; Maule, L.; Serpelloni, M.; Lancini, M. Validation of Marker-Less System for the Assessment of Upper Joints Reaction Forces in Exoskeleton Users. Sensors 2020, 20, 3899. [Google Scholar] [CrossRef]
- Zhang, F.; Juneau, P.; McGuirk, C.; Tu, A.; Cheung, K.; Baddour, N.; Lemaire, E. Comparison of OpenPose and HyperPose artificial intelligence models for analysis of hand-held smartphone videos. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Neuchâtel, Switzerland, 23–25 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Colley, J.; Zeeman, H.; Kendall, E. Everything Happens in the Hallways: Exploring User Activity in the Corridors at Two Rehabilitation Units. HERD Health Environ. Res. Des. J. 2017, 11, 163–176. [Google Scholar] [CrossRef] [PubMed]
- Kang, Y.-S.; Ho, Y.-S. Geometrical Compensation Algorithm of Multiview Image for Arc Multi-camera Arrays. In Proceedings of the Pacific-Rim Conference on Multimedia, Tainan, Taiwan, 9–13 December 2008; pp. 543–552. [Google Scholar] [CrossRef]
- Wolf, T.; Babaee, M.; Rigoll, G. Multi-view gait recognition using 3D convolutional neural networks. In Proceedings of the 2016 IEEE International Conference on Image Processing, Phoenix, AZ, USA, 25–28 September 2016; pp. 4165–4169. [Google Scholar] [CrossRef] [Green Version]
- Sato, T.; Ikeda, S.; Yokoya, N. Extrinsic Camera Parameter Recovery from Multiple Image Sequences Captured by an Omni-Directional Multi-camera System. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; pp. 326–340. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, K.; Mikami, D.; Isogawa, M.; Kimata, H. Human Pose as Calibration Pattern: 3D Human Pose Estimation with Multiple Unsynchronized and Uncalibrated Cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops 2018, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar] [CrossRef]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 172–186. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Susko, T.; Swaminathan, K.; Krebs, H.I. MIT-Skywalker: A Novel Gait Neurorehabilitation Robot for Stroke and Cerebral Palsy. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1089–1099. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Liu, G.; Li, H.; Pietikainen, M. 3D Gait Recognition Using Multiple Cameras. In Proceedings of the 7th International Conference on Automatic Face and Gesture Recognition (FGR06), Southampton, UK, 10–12 April 2006. [Google Scholar] [CrossRef] [Green Version]
- Auvinet, E.; Multon, F.; Aubin, C.-E.; Meunier, J.; Raison, M. Detection of gait cycles in treadmill walking using a Kinect. Gait Posture 2014, 41, 722–725. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Vo, M.; Narasimhan, S.G.; Sheikh, Y. Spatiotemporal Bundle Adjustment for Dynamic 3D Reconstruction. In Proceedings of the the IEEE Conference on Computer Vision and Pattern Recognition 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 1710–1718. [Google Scholar] [CrossRef]
- Bartoli, A.; Sturm, P. Structure-from-motion using lines: Representation, triangulation, and bundle adjustment. Comput. Vis. Image Underst. 2005, 100, 416–441. [Google Scholar] [CrossRef] [Green Version]
- Ota, M.; Tateuchi, H.; Hashiguchi, T.; Ichihashi, N. Verification of validity of gait analysis systems during treadmill walking and running using human pose tracking algorithm. Gait Posture 2021, 85, 290–297. [Google Scholar] [CrossRef] [PubMed]
- Zeni, J.A., Jr.; Richards, J.G.; Higginson, J.S. Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 2008, 27, 710–714. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scipy.Signal.Find_Peaks—SciPy v1.6.3 Reference Guide. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.signal.find_peaks.html (accessed on 9 May 2021).
- Capela, N.A.; Lemaire, E.D.; Baddour, N. Novel algorithm for a smartphone-based 6-minute walk test application: Algorithm, application development, and evaluation. J. Neuroeng. Rehabil. 2015, 12, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Capela, N.A.; Lemaire, E.D.; Baddour, N.C. A smartphone approach for the 2 and 6-minute walk test. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 958–961. [Google Scholar] [CrossRef]
- Sinitski, E.H.; Lemaire, E.; Baddour, N.; Besemann, M.; Dudek, N.L.; Hebert, J. Fixed and self-paced treadmill walking for able-bodied and transtibial amputees in a multi-terrain virtual environment. Gait Posture 2015, 41, 568–573. [Google Scholar] [CrossRef]
- Khamis, S.; Danino, B.; Springer, S.; Ovadia, D.; Carmeli, E. Detecting Anatomical Leg Length Discrepancy Using the Plug-in-Gait Model. Appl. Sci. 2017, 7, 926. [Google Scholar] [CrossRef] [Green Version]
- Kroneberg, D.; Elshehabi, M.; Meyer, A.-C.; Otte, K.; Doss, S.; Paul, F.; Nussbaum, S.; Berg, D.; Kühn, A.A.; Maetzler, W.; et al. Less Is More–Estimation of the Number of Strides Required to Assess Gait Variability in Spatially Confined Settings. Front. Aging Neurosci. 2019, 10, 435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wren, T.A.L.; Rethlefsen, S.A.; Healy, B.S.; Do, K.P.; Dennis, S.W.; Kay, R.M. Reliability and Validity of Visual Assessments of Gait Using a Modified Physician Rating Scale for Crouch and Foot Contact. J. Pediatr. Orthop. 2005, 25, 646–650. [Google Scholar] [CrossRef] [PubMed]
- Williams, G.; Morris, M.E.; Schache, A.; McCrory, P. Observational gait analysis in traumatic brain injury: Accuracy of clinical judgment. Gait Posture 2009, 29, 454–459. [Google Scholar] [CrossRef] [PubMed]
- Rathinam, C.; Bateman, A.; Peirson, J.; Skinner, J. Observational gait assessment tools in paediatrics–A systematic review. Gait Posture 2014, 40, 279–285. [Google Scholar] [CrossRef]
- Shi, M.; Aberman, K.; Aristidou, A.; Komura, T.; Lischinski, D.; Cohen-Or, D.; Chen, B. MotioNet: 3D human motion reconstruction from monocular video with skeleton consistency. ACM Trans. Graph. 2021, 40, 1–15. [Google Scholar] [CrossRef]
- Pose Classification Options |ML Kit| Google Developers. Available online: https://developers.google.com/ml-kit/vision/pose-detection (accessed on 6 May 2021).
- Security Lenses|Fujifilm Global. Available online: https://www.fujifilm.com/products/optical_devices/cctv/ (accessed on 21 February 2021).
- Olague, G.; Mohr, R. Optimal camera placement for accurate reconstruction. Pattern Recognit. 2002, 35, 927–944. [Google Scholar] [CrossRef] [Green Version]
- GPIO Electrical Characteristics BFS-U3-16S2. Available online: http://softwareservices.flir.com/BFS-U3-16S2/latest/Family/ElectricalGPIO.htm?Highlight=BFS-U3-16S2electrical (accessed on 22 February 2021).
- Romero-Ramirez, F.J.; Muñoz-Salinas, R.; Medina-Carnicer, R. Speeded up detection of squared fiducial markers. Image Vis. Comput. 2018, 76, 38–47. [Google Scholar] [CrossRef]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.; Medina-Carnicer, R. Generation of fiducial marker dictionaries using Mixed Integer Linear Programming. Pattern Recognit. 2016, 51, 481–491. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Optimal Randomized RANSAC. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1472–1482. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, S.; Mierle, K. Ceres Solver—A Large Scale Non-Linear Optimization Library. 2019. Available online: http://ceres-solver.org/ (accessed on 6 May 2021).
- Moore, D.D.; Walker, J.D.; MacLean, J.N.; Hatsopoulos, N.G. Anipose: A Toolkit for Robust Marker-Less 3D Pose Estimation. bioRxiv 2020. [Google Scholar] [CrossRef]
- Aniposelib/Aniposelib at Master, Lambdaloop/Aniposelib, GitHub. Available online: https://github.com/lambdaloop/aniposelib/tree/master/aniposelib (accessed on 9 May 2021).








| System | Resolution (Pixels) | Framerate (fps) | Working Distance (m) | Calibration | Synchronization |
|---|---|---|---|---|---|
| Labuguen et al., 2020 [9] | 1280 × 720 | 30 | 3 | Calibrated to participant | Per-trial manual post-processing |
| Rodrigues et al., 2019 [10] | 640 × 480 | 35 | 3 | Calibrated to participant | Time-stamping algorithm |
| Nakano et al., 2020 [11] | 1920 × 1080 | 120 | 4 | Per-trial, in region of interest | Per-trial manual post-processing |
| Tamura et al., 2020 [12] | 640 × 480 | 30 | Not reported | None, only relative measures | Single camera |
| Stenum et al., 2021 [13] | 960 × 540 | 25 | 3.3 | Not reported | Automatic (hardware) |
| Albert et al., 2020 [14] | 3840 × 540 | 30 | 3.5 | None, single-depth sensor | Per-trial manual post-processing |
| Pasinetti et al., 2020 [15] | 640 × 480 | 30 | 3 | Performed once | Time-stamping algorithm |
| Smart Hallway (ours) | 1440 × 1080 | 60–120 | 7.5 | Performed once | Automatic (Hardware) |
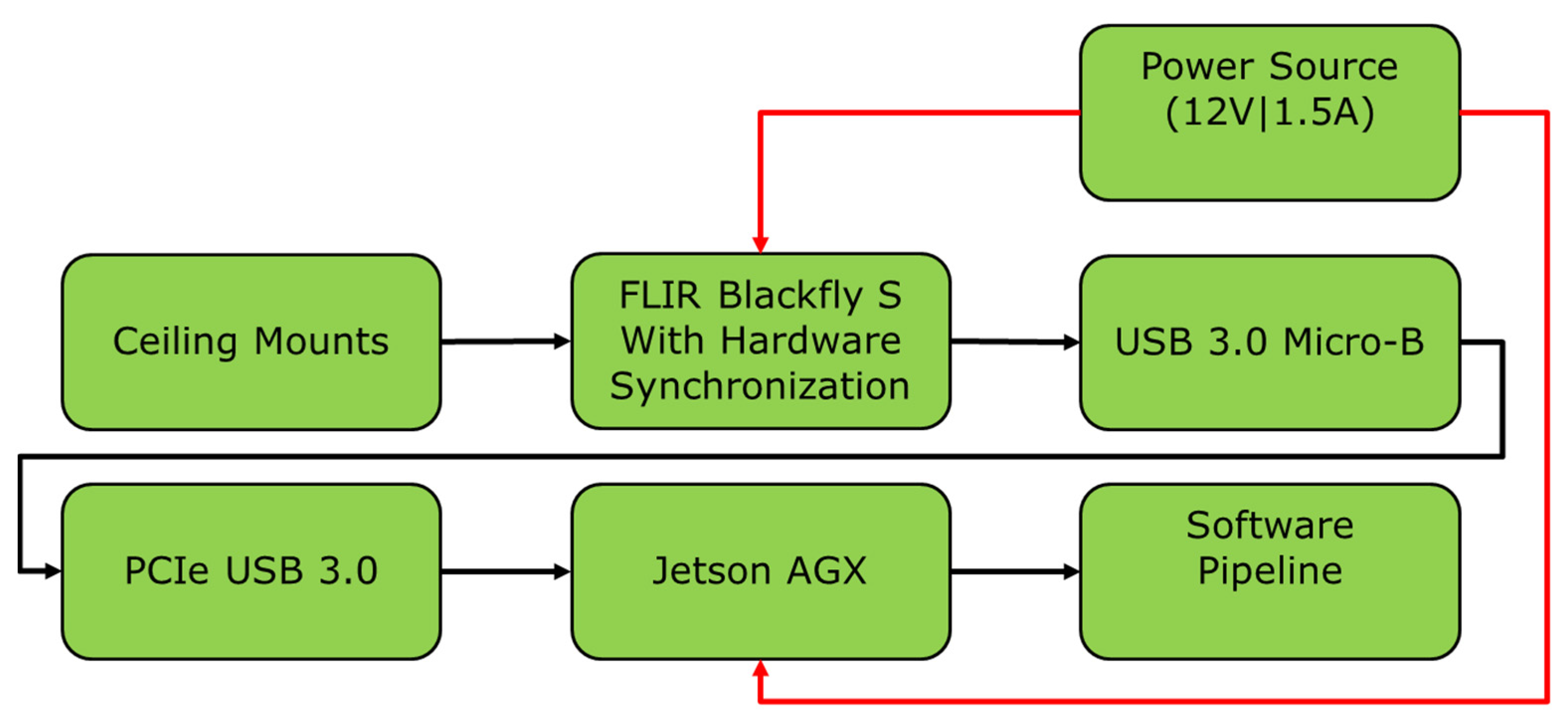
| Component | Name | Description | Data Handling |
|---|---|---|---|
| Cameras | FLIR BlackFly S USB3 (BFS-U3-16S2C-CS) | Resolution: 1440 × 1080 Frame rate: 1–226 fps | Output: 280 MB/s (USB) Cameras: 4 |
| Data-Transfer Cables | USB-A with active extension cable | Length: 3 m + 5 m Format: 1 × USB3.0 | Bandwidth: 625 MB/s (USB) Cables: 4 |
| PCIe Card | StarTech (PEXUSB3S44V) | Format: 4 × USB3.0, 1 × PCIe x4 Gen 2.0 | Bandwidth: 4 × 625 MB/s (USB), 4 GB/s (PCIe) |
| HPC Unit | NVIDIA Jetson AGX Xavier | Format: 1 × PCIe x8 Gen 4.0 | Bandwidth: 16 GB/s (PCIe) |
| Data Storage | Samsung 970 EVO Plus (MZ-V7S500/AM) | Format: NVME M.2 | Read/Write: 3.5 GB/s |
| Condition | Protocol |
|---|---|
| Walking straight | Start one meter outside the capture volume and walk straight. Once through the capture volume, turn around and walk back to the initial position. The turn occurs outside of the camera field of view. |
| Walking and turning | Start at the edge of the capture volume and walk towards a marker positioned 50 cm from the end of the capture volume. Turn around the marker and walk back to the initial position. The turn occurs within the camera field of view. |
| Walking in a curved path | Start at the edge of the capture volume and walk in a curved path around the capture volume. The test ends once the participant reaches their initial position. The participant performs each test in the same direction. |
| Walking with a cane | Follow the “walking straight” protocol while using a cane as a walking aid. Cane held in the same hand for all trials. Participants were instructed on how to properly use a cane |
| Walking with a walker | Follow the “walking straight” protocol while using a wheeled walker as a walking aid. Participants were instructed on how to properly use a walker. |
| Walking Condition | Walking Straight | Walking Turn | Walking Curve | |||
|---|---|---|---|---|---|---|
| Limb Segment (cm) | SH | Delta | SH | Delta | SH | Delta |
| Left Arm | 29.60 (1.92) | 0.10 (1.92) | 28.49 (1.63) | −1.01 (1.63) | 28.75 (1.33) | −0.75 (1.33) |
| Left Forearm | 25.37 (2.41) | −1.13 (2.41) | 25.75 (1.53) | −0.75 (1.53) | 25.68 (1.15) | −0.82 (1.15) |
| Right Arm | 29.07 (1.93) | 0.07 (1.93) | 28.74 (1.65) | −0.26 (1.65) | 28.88 (1.24) | −0.12 (1.24) |
| Right Forearm | 24.91 (2.76) | −2.09 (2.76) | 25.24 (2.12) | −1.76 (2.12) | 25.18 (1.51) | −1.82 (1.51) |
| Left Thigh | 38.29 (2.51) | −3.21 (2.51) | 38.45 (2.59) | −3.05 (2.59) | 38.05 (2.26) | −3.45 (2.26) |
| Left Shank | 39.01 (3.94) | −0.99 (3.94) | 39.62 (4.11) | −0.38 (4.11) | 39.38 (3.17) | −0.62 (3.17) |
| Right Thigh | 37.88 (2.29) | −3.12 (2.29) | 37.93 (1.93) | −3.07 (1.93) | 37.30 (2.00) | −3.70 (2.00) |
| Right Shank | 38.51 (3.15) | −1.49 (3.15) | 39.17 (3.84) | −0.83 (3.84) | 38.78 (3.13) | −1.22 (3.13) |
| Left Ankle to Heel | 6.91 (2.51) | −0.09 (2.51) | 7.50 (2.81) | 0.50 (2.81) | 6.76 (1.73) | −0.24 (1.73) |
| Left Ankle to Big Toe | 17.16 (5.46) | −0.84 (5.46) | 18.12 (4.40) | 0.12 (4.40) | 16.75 (2.88) | −1.25 (2.88) |
| Left Ankle to Small Toe | 14.37 (4.49) | −2.63 (4.49) | 15.29 (4.30) | −1.71 (4.30) | 13.90 (2.60) | −3.10 (2.60) |
| Left Toe Width | 7.40 (2.37) | −0.10 (2.37) | 7.72 (2.96) | 0.22 (2.96) | 6.76 (1.86) | −0.74 (1.86) |
| Right Ankle to Heel | 7.76 (2.90) | 0.26 (2.90) | 7.09 (2.68) | −0.41 (2.68) | 6.87 (1.90) | −0.63 (1.90) |
| Right Ankle to Big Toe | 15.63 (4.65) | −2.87 (4.65) | 16.91 (5.09) | −1.59 (5.09) | 16.21 (3.08) | −2.29 (3.08) |
| Right Ankle to Small Toe | 12.87 (4.01) | −4.63 (4.01) | 14.39 (3.22) | −3.11 (3.22) | 13.96 (2.46) | −3.54 (2.46) |
| Right Toe Width | 8.85 (3.51) | 1.35 (3.51) | 7.73 (2.40) | 0.23 (2.40) | 7.08 (2.62) | −0.42 (2.62) |
| Shoulder Width | 35.33 (1.77) | −0.67 (1.77) | 35.24 (1.35) | −0.76 (1.35) | 34.62 (2.09) | −1.38 (2.09) |
| Hip Width | 22.45 (1.33) | −1.05 (1.33) | 22.25 (1.33) | −1.25 (1.33) | 22.15 (1.70) | −1.35 (1.70) |
| Chest Height | 53.91 (1.93) | −1.09 (1.93) | 53.57 (1.45) | −1.43 (1.45) | 54.27 (1.24) | −0.73 (1.24) |
| Walking Condition | Walking Straight | Cane | Walker | |||
|---|---|---|---|---|---|---|
| Limb Segment (cm) | SH | Delta | SH | Delta | SH | Delta |
| Left Arm | 29.60 (1.92) | 0.10 (1.92) | 29.36 (1.18) | −0.14 (1.18) | 28.82 (1.64) | −0.68 (1.64) |
| Left Forearm | 25.37 (2.41) | −1.13 (2.41) | 25.62 (1.27) | −0.88 (1.27) | 30.79 (7.50) | 4.29 (7.50) |
| Right Arm | 29.07 (1.93) | 0.07 (1.93) | 28.59 (1.66) | −0.41 (1.66) | 28.61 (1.86) | −0.39 (1.86) |
| Right Forearm | 24.91 (2.76) | −2.09 (2.76) | 26.20 (3.92) | −0.80 (3.92) | 30.57 (7.29) | 3.57 (7.29) |
| Left Thigh | 38.29 (2.51) | −3.21 (2.51) | 38.19 (2.33) | −3.31 (2.33) | 39.32 (2.90) | −2.18 (2.90) |
| Left Shank | 39.01 (3.94) | −0.99 (3.94) | 39.02 (2.75) | −0.98 (2.75) | 40.29 (3.65) | 0.29 (3.65) |
| Right Thigh | 37.88 (2.29) | −3.12 (2.29) | 38.20 (2.45) | −2.80 (2.45) | 38.90 (3.19) | −2.10 (3.19) |
| Right Shank | 38.51 (3.15) | −1.49 (3.15) | 38.85 (3.04) | −1.15 (3.04) | 40.47 (4.07) | 0.47 (4.07) |
| Left Ankle to Heel | 6.91 (2.51) | −0.09 (2.51) | 7.17 (2.66) | 0.17 (2.66) | 6.87 (2.39) | −0.13 (2.39) |
| Left Ankle to Big Toe | 17.16 (5.46) | −0.84 (5.46) | 16.65 (5.02) | −1.35 (5.02) | 14.89 (4.47) | −3.11 (4.47) |
| Left Ankle to Small Toe | 14.37 (4.49) | −2.63 (4.49) | 14.27 (3.82) | −2.73 (3.82) | 12.34 (3.90) | −4.66 (3.90) |
| Left Toe Width | 7.40 (2.37) | −0.10 (2.37) | 7.29 (2.36) | −0.21 (2.36) | 7.52 (2.41) | 0.02 (2.41) |
| Right Ankle to Heel | 7.76 (2.90) | 0.26 (2.90) | 6.51 (2.56) | −0.99 (2.56) | 5.94 (1.96) | −1.56 (1.96) |
| Right Ankle to Big Toe | 15.63 (4.65) | −2.87 (4.65) | 15.10 (5.25) | −3.40 (5.25) | 15.36 (4.07) | −3.14 (4.07) |
| Right Ankle to Small Toe | 12.87 (4.01) | −4.63 (4.01) | 12.39 (3.96) | −5.11 (3.96) | 13.34 (3.75) | −4.16 (3.75) |
| Right Toe Width | 8.85 (3.51) | 1.35 (3.51) | 7.05 (2.67) | −0.45 (2.67) | 7.19 (2.02) | −0.31 (2.02) |
| Shoulder Width | 35.33 (1.77) | −0.67 (1.77) | 34.99 (1.26) | −1.01 (1.26) | 35.33 (1.22) | −0.67 (1.22) |
| Hip Width | 22.45 (1.33) | −1.05 (1.33) | 22.21 (0.93) | −1.29 (0.93) | 22.05 (0.96) | −1.45 (0.96) |
| Chest Height | 53.91 (1.93) | −1.09 (1.93) | 54.34 (1.26) | −0.66 (1.26) | 54.45 (1.47) | −0.55 (1.47) |
| Condition | Offset (Frames, μ(σ)) | Zeni and IT Recovery (%) | Zeni, IT Recovery, and Capela (%) |
|---|---|---|---|
| Walking Straight | 4.38 (2.72) | 89.2 | 98.2 |
| Walking Turn | 4.13 (2.60) | 83.0 | 98.6 |
| Walking Curve | 3.99 (3.42) | 84.3 | 97.4 |
| Cane | 3.01 (2.52) | 85.5 | 97.7 |
| Walker | 5.25 (3.57) | 88.9 | 98.7 |
| Average | 4.15 (2.97) | 86.1 | 98.1 |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.60 (0.26) | 1.62 (0.26) | 0.03 (0.07) | 1.63 (0.21) | 1.63 (0.19) | −0.01 (0.08) |
| Stride time (s) | 1.18 (0.05) | 1.19 (0.05) | 0.00 (0.05) | 1.19 (0.06) | 1.19 (0.07) | 0.00 (0.04) |
| Stride speed (m/s) | 1.34 (0.22) | 1.36 (0.21) | 0.02 (0.03) | 1.38 (0.16) | 1.37 (0.14) | 0.00 (0.06) |
| Step length (m) | 0.50 (0.19) | 0.38 (0.16) | −0.13 (0.06) | 0.44 (0.19) | 0.36 (0.16) | −0.08 (0.06) |
| Step width (m) | 0.09 (0.03) | 0.11 (0.02) | 0.02 (0.01) | 0.12 (0.04) | 0.13 (0.03) | 0.01 (0.02) |
| Step time (s) | 0.63 (0.10) | 0.61 (0.08) | −0.02 (0.06) | 0.59 (0.06) | 0.60 (0.08) | 0.01 (0.05) |
| Cadence (steps/min) | 98.13 (4.54) | 99.73 (3.29) | 1.60 (4.87) | 102.41 (6.30) | 101.45 (8.68) | −0.95 (4.60) |
| Stance time (s) | 0.73 (0.04) | 0.78 (0.04) | 0.05 (0.05) | 0.72 (0.06) | 0.77 (0.05) | 0.05 (0.07) |
| Swing time (s) | 0.46 (0.10) | 0.40 (0.04) | −0.06 (0.10) | 0.50 (0.11) | 0.43 (0.03) | −0.08 (0.10) |
| Stance swing ratio (NA) | 1.61 (0.35) | 1.94 (0.26) | 0.33 (0.36) | 1.44 (0.22) | 1.82 (0.20) | 0.38 (0.34) |
| Double support time (s) | 0.13 (0.10) | 0.18 (0.03) | 0.05 (0.11) | 0.13 (0.03) | 0.18 (0.03) | 0.05 (0.05) |
| Foot angle (°) | 12.82 (4.86) | 12.94 (4.70) | 0.12 (1.04) | 14.24 (6.14) | 14.57 (7.30) | 0.34 (2.33) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.32 (0.36) | 1.33 (0.39) | 0.01 (0.13) | 1.41 (0.35) | 1.40 (0.37) | −0.01 (0.14) |
| Stride time (s) | 1.18 (0.09) | 1.19 (0.06) | 0.00 (0.08) | 1.24 (0.10) | 1.21 (0.08) | −0.03 (0.09) |
| Stride speed (m/s) | 1.12 (0.30) | 1.11 (0.32) | −0.01 (0.10) | 1.15 (0.35) | 1.17 (0.35) | 0.02 (0.06) |
| Step length (m) | 0.41 (0.18) | 0.33 (0.15) | −0.08 (0.07) | 0.40 (0.17) | 0.32 (0.14) | −0.08 (0.07) |
| Step width (m) | 0.12 (0.05) | 0.13 (0.04) | 0.01 (0.02) | 0.12 (0.05) | 0.12 (0.04) | 0.01 (0.01) |
| Step time (s) | 0.61 (0.13) | 0.59 (0.12) | −0.01 (0.08) | 0.68 (0.25) | 0.66 (0.22) | −0.02 (0.08) |
| Cadence (steps/min) | 98.24 (8.45) | 102.36 (12.35) | 4.13 (7.25) | 90.53 (10.52) | 92.61 (10.40) | 2.07 (2.60) |
| Stance time (s) | 0.73 (0.09) | 0.78 (0.06) | 0.05 (0.07) | 0.74 (0.10) | 0.78 (0.08) | 0.04 (0.07) |
| Swing time (s) | 0.48 (0.07) | 0.43 (0.05) | −0.06 (0.08) | 0.50 (0.08) | 0.43 (0.06) | −0.08 (0.09) |
| Stance swing ratio | 1.57 (0.34) | 1.81 (0.29) | 0.25 (0.40) | 1.47 (0.22) | 1.79 (0.22) | 0.32 (0.30) |
| Double support time (s) | 0.13 (0.07) | 0.17 (0.04) | 0.04 (0.06) | 0.13 (0.06) | 0.17 (0.04) | 0.04 (0.05) |
| Foot angle (°) | 13.06 (4.92) | 13.41 (4.93) | 0.35 (0.91) | 13.81 (6.71) | 14.54 (7.37) | 0.72 (1.52) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.29 (0.33) | 1.31 (0.24) | 0.02 (0.16) | 1.37 (0.27) | 1.39 (0.25) | 0.01 (0.12) |
| Stride time (s) | 1.21 (0.13) | 1.23 (0.05) | 0.02 (0.10) | 1.25 (0.09) | 1.25 (0.06) | 0.00 (0.06) |
| Stride speed (m/s) | 1.05 (0.23) | 1.06 (0.18) | 0.01 (0.08) | 1.11 (0.13) | 1.12 (0.13) | 0.00 (0.03) |
| Step length (m) | 0.38 (0.18) | 0.30 (0.13) | −0.08 (0.08) | 0.41 (0.15) | 0.32 (0.13) | −0.08 (0.06) |
| Step width (m) | 0.29 (0.16) | 0.24 (0.17) | −0.04 (0.09) | 0.30 (0.18) | 0.27 (0.15) | −0.04 (0.04) |
| Step time (s) | 0.61 (0.16) | 0.63 (0.10) | 0.02 (0.10) | 0.65 (0.12) | 0.64 (0.12) | −0.01 (0.05) |
| Cadence (steps/min) | 98.18 (7.68) | 96.63 (6.01) | −1.55 (5.31) | 93.06 (8.22) | 93.80 (7.32) | 0.75 (4.52) |
| Stance time (s) | 0.76 (0.11) | 0.83 (0.07) | 0.07 (0.08) | 0.78 (0.10) | 0.84 (0.04) | 0.06 (0.07) |
| Swing time (s) | 0.45 (0.08) | 0.40 (0.04) | −0.06 (0.07) | 0.47 (0.07) | 0.41 (0.04) | −0.06 (0.10) |
| Stance swing ratio | 1.70 (0.29) | 2.08 (0.20) | 0.38 (0.32) | 1.70 (0.28) | 2.04 (0.24) | 0.34 (0.27) |
| Double support time (s) | 0.17 (0.07) | 0.21 (0.03) | 0.04 (0.08) | 0.18 (0.06) | 0.22 (0.03) | 0.05 (0.06) |
| Foot angle (°) | 32.09 (7.04) | 32.59 (6.77) | 0.50 (3.81) | 36.83(11.21) | 37.93 (11.49) | 1.10 (2.41) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.34 (0.18) | 1.32 (0.16) | −0.01 (0.08) | 1.31 (0.20) | 1.31 (0.21) | 0.00 (0.05) |
| Stride time (s) | 1.90 (0.16) | 1.88 (0.11) | −0.02 (0.10) | 1.86 (0.13) | 1.86 (0.13) | 0.00 (0.06) |
| Stride speed (m/s) | 0.71 (0.10) | 0.71 (0.09) | 0.00 (0.02) | 0.73 (0.07) | 0.73 (0.07) | 0.00 (0.02) |
| Step length (m) | 0.42 (0.15) | 0.37 (0.14) | −0.05 (0.03) | 0.43 (0.14) | 0.41 (0.14) | −0.02 (0.03) |
| Step width (m) | 0.13 (0.03) | 0.14 (0.03) | 0.01 (0.01) | 0.14 (0.03) | 0.14 (0.03) | 0.00 (0.01) |
| Step time (s) | 0.95 (0.18) | 0.90 (0.19) | −0.05 (0.06) | 0.96 (0.17) | 1.00 (0.16) | 0.04 (0.07) |
| Cadence (steps/min) | 63.72 (6.00) | 67.25 (7.59) | 3.53 (2.38) | 62.58 (4.62) | 60.15 (3.65) | −2.43 (2.13) |
| Stance time (s) | 1.21 (0.13) | 1.31 (0.10) | 0.09 (0.08) | 1.15 (0.10) | 1.18 (0.10) | 0.03 (0.06) |
| Swing time (s) | 0.66 (0.10) | 0.56 (0.06) | −0.11 (0.08) | 0.70 (0.08) | 0.67 (0.09) | −0.04 (0.07) |
| Stance swing ratio | 1.85 (0.37) | 2.28 (0.34) | 0.43 (0.26) | 1.62 (0.22) | 1.75 (0.31) | 0.14 (0.24) |
| Double support time (s) | 0.28 (0.10) | 0.35 (0.06) | 0.07 (0.07) | 0.22 (0.06) | 0.27 (0.07) | 0.05 (0.06) |
| Foot angle (°) | 11.86 (3.51) | 12.11 (3.48) | 0.25 (0.79) | 12.44 (5.74) | 12.55 (5.69) | 0.12 (0.65) |
| Left | Right | |||||
|---|---|---|---|---|---|---|
| Parameters (Units) | SH | Ground Truth | Delta | SH | Ground Truth | Delta |
| Stride length (m) | 1.07 (0.15) | 1.07 (0.14) | 0.00 (0.07) | 1.07 (0.16) | 1.07 (0.15) | 0.00 (0.07) |
| Stride time (s) | 1.79 (0.15) | 1.78 (0.15) | −0.01 (0.08) | 1.77 (0.19) | 1.77 (0.17) | −0.01 (0.11) |
| Stride speed (m/s) | 0.60 (0.09) | 0.60 (0.09) | 0.00 (0.02) | 0.62 (0.09) | 0.62 (0.09) | 0.00 (0.02) |
| Step length (m) | 0.34 (0.14) | 0.29 (0.12) | −0.05 (0.04) | 0.33 (0.12) | 0.29 (0.11) | −0.04 (0.04) |
| Step width (m) | 0.09 (0.03) | 0.11 (0.03) | 0.01 (0.01) | 0.12 (0.02) | 0.13 (0.02) | 0.01 (0.01) |
| Step time (s) | 0.89 (0.12) | 0.86 (0.13) | −0.03 (0.09) | 0.90 (0.24) | 0.91 (0.24) | 0.01 (0.09) |
| Cadence (steps/min) | 67.62 (5.24) | 69.90 (5.72) | 2.28 (2.53) | 64.03 (7.74) | 63.51 (8.44) | −0.52 (2.25) |
| Stance time (s) | 1.14 (0.12) | 1.29 (0.12) | 0.14 (0.08) | 1.15 (0.11) | 1.25 (0.12) | 0.11 (0.10) |
| Swing time (s) | 0.64 (0.08) | 0.50 (0.06) | −0.14 (0.07) | 0.63 (0.13) | 0.50 (0.09) | −0.12 (0.09) |
| Stance swing ratio | 1.80 (0.25) | 2.57 (0.33) | 0.77 (0.37) | 1.81 (0.20) | 2.43 (0.28) | 0.62 (0.35) |
| Double support time (s) | 0.30 (0.20) | 0.40 (0.18) | 0.10 (0.08) | 0.26 (0.07) | 0.37 (0.06) | 0.11 (0.08) |
| Foot angle (°) | 12.89 (4.24) | 13.10 (4.28) | 0.21 (0.67) | 13.05 (6.34) | 13.38 (6.30) | 0.33 (1.68) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
McGuirk, C.J.C.; Baddour, N.; Lemaire, E.D. Video-Based Deep Learning Approach for 3D Human Movement Analysis in Institutional Hallways: A Smart Hallway. Computation 2021, 9, 130. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9120130
McGuirk CJC, Baddour N, Lemaire ED. Video-Based Deep Learning Approach for 3D Human Movement Analysis in Institutional Hallways: A Smart Hallway. Computation. 2021; 9(12):130. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9120130
Chicago/Turabian StyleMcGuirk, Connor J. C., Natalie Baddour, and Edward D. Lemaire. 2021. "Video-Based Deep Learning Approach for 3D Human Movement Analysis in Institutional Hallways: A Smart Hallway" Computation 9, no. 12: 130. https://0-doi-org.brum.beds.ac.uk/10.3390/computation9120130