
Implementation of Multi-Exit Neural-Network Inferences for an Image-Based Sensing System with Energy Harvesting


Abstract
:1. Introduction
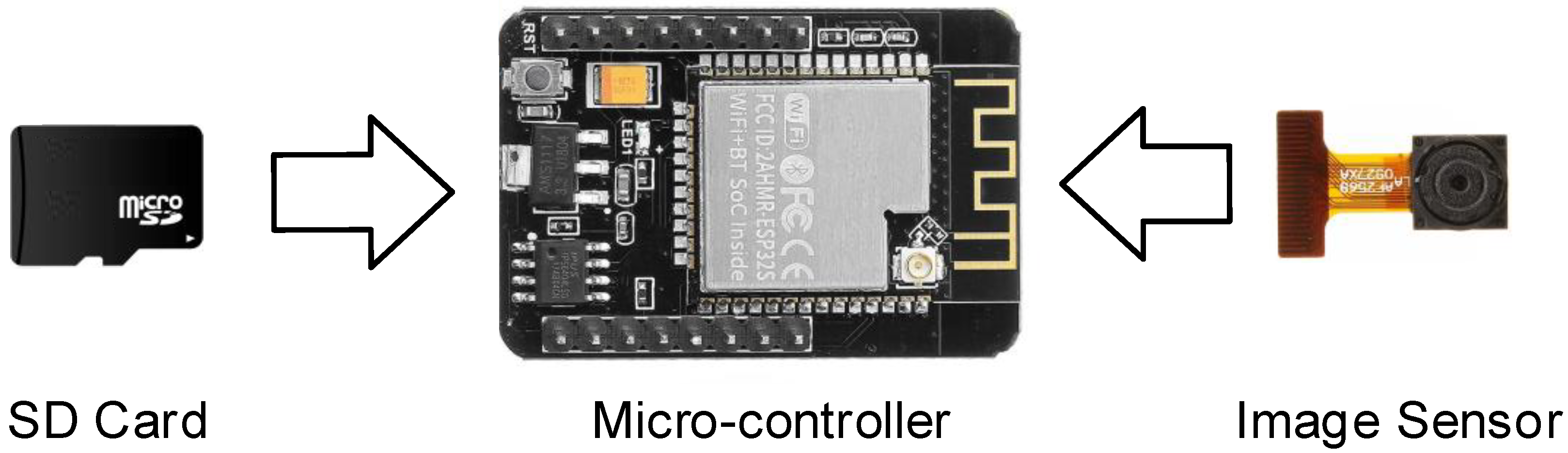
2. Target System
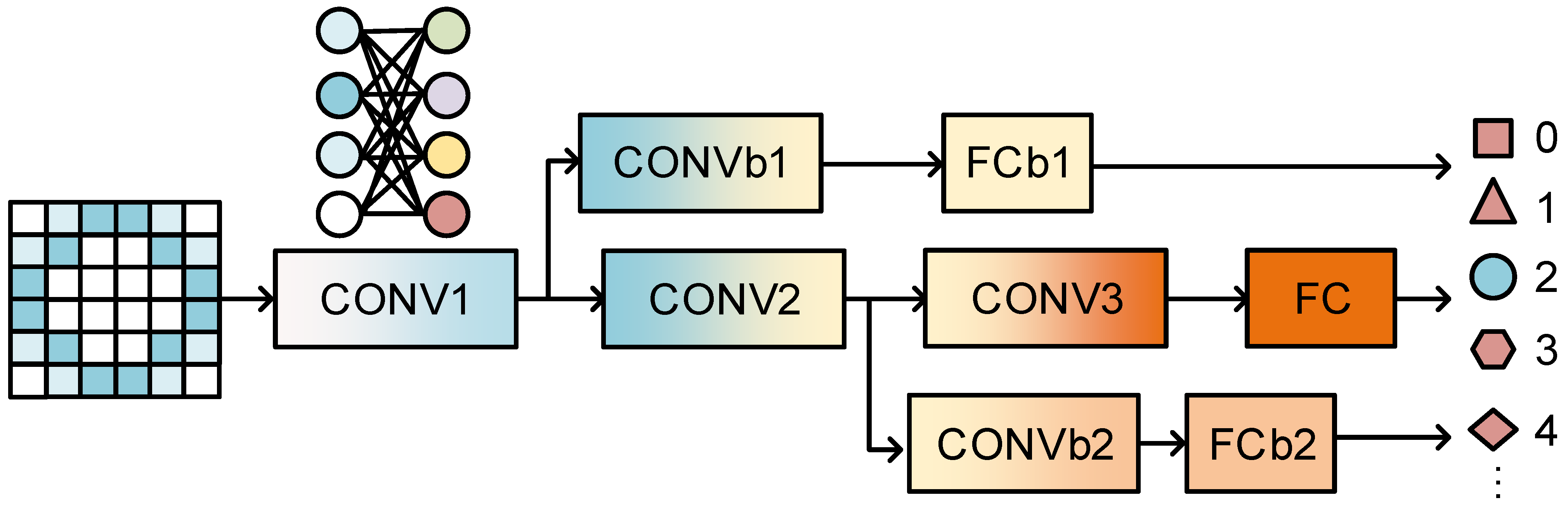
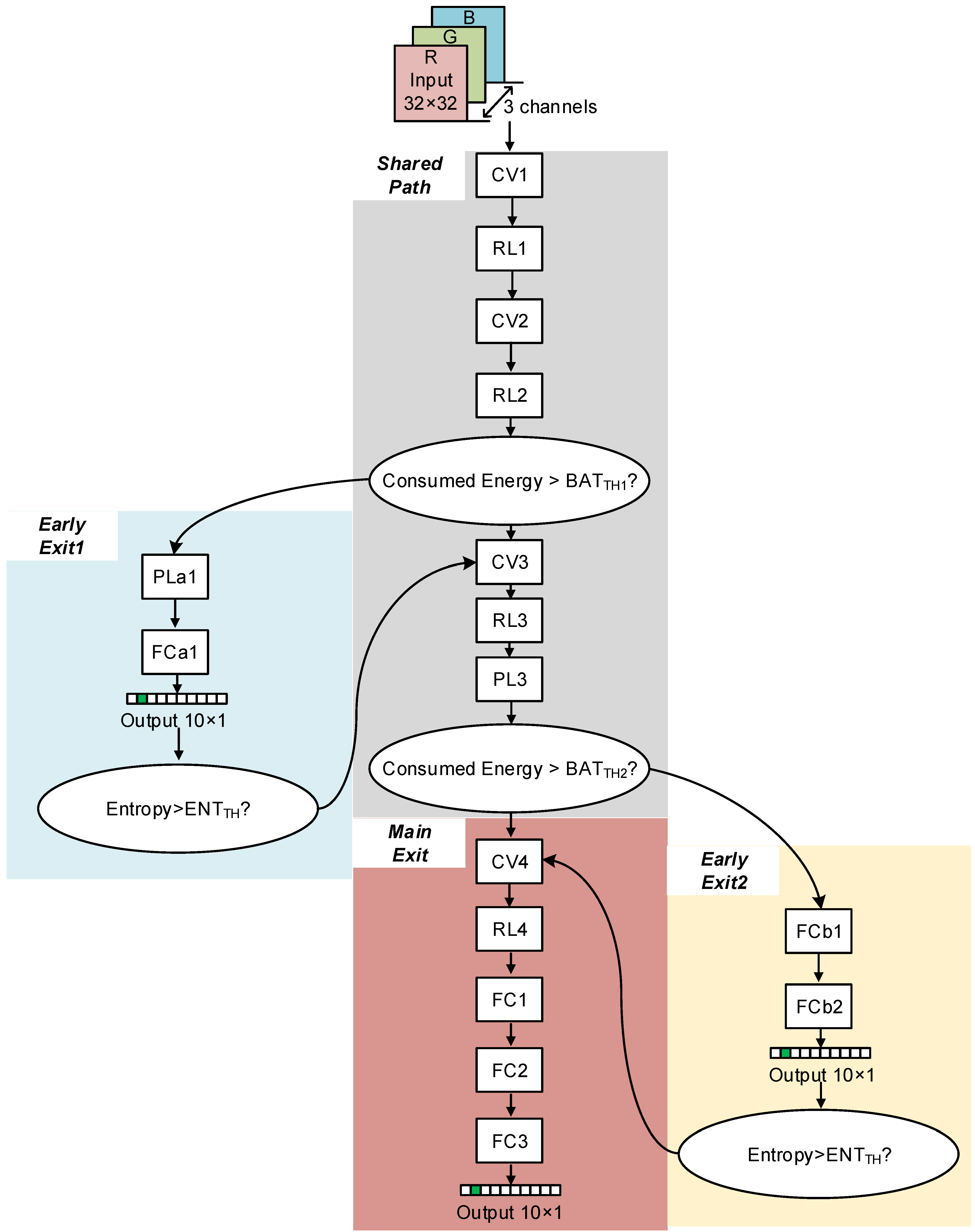
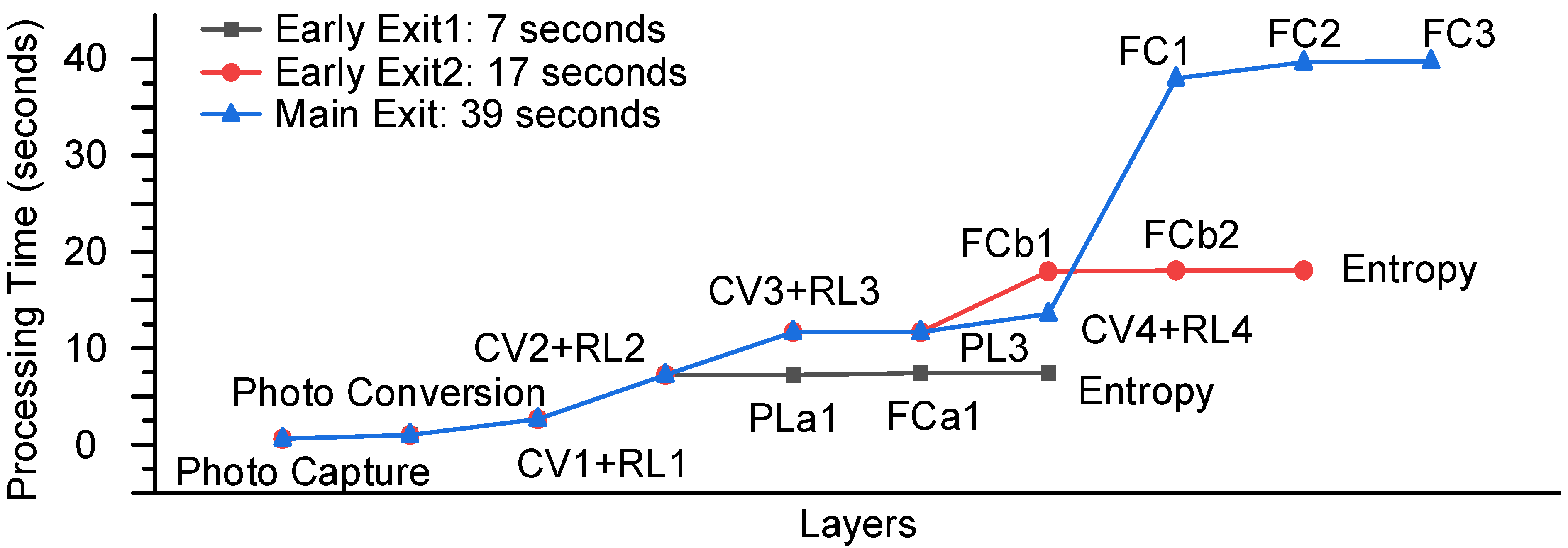
3. Proposed Multi-Exit CNN
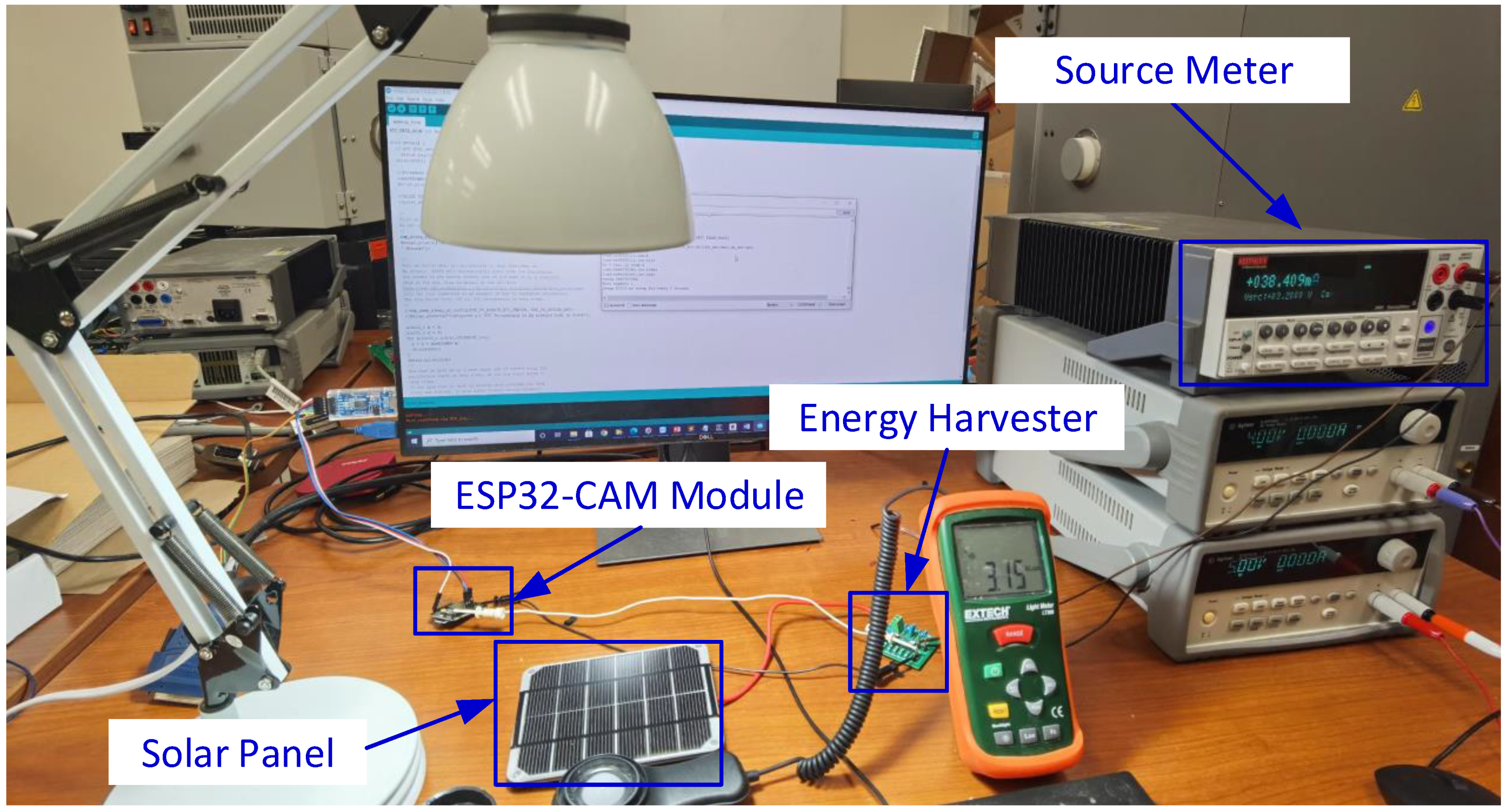
4. Hardware Implementation
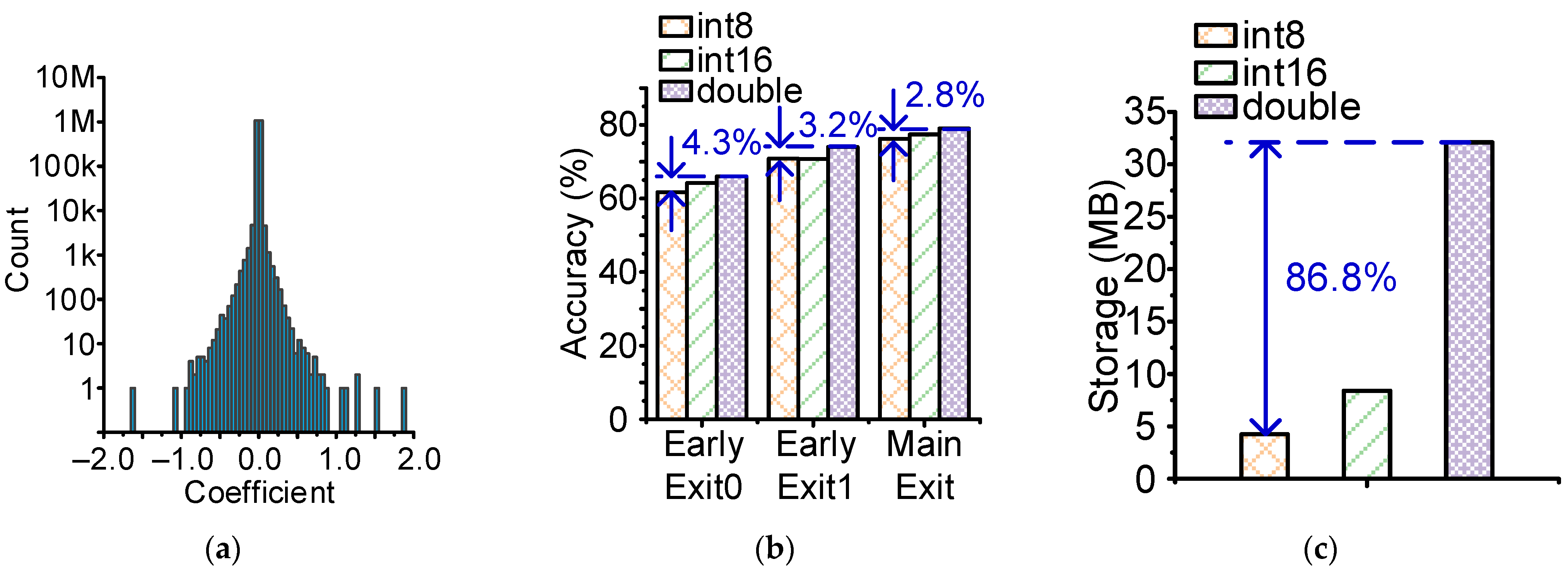
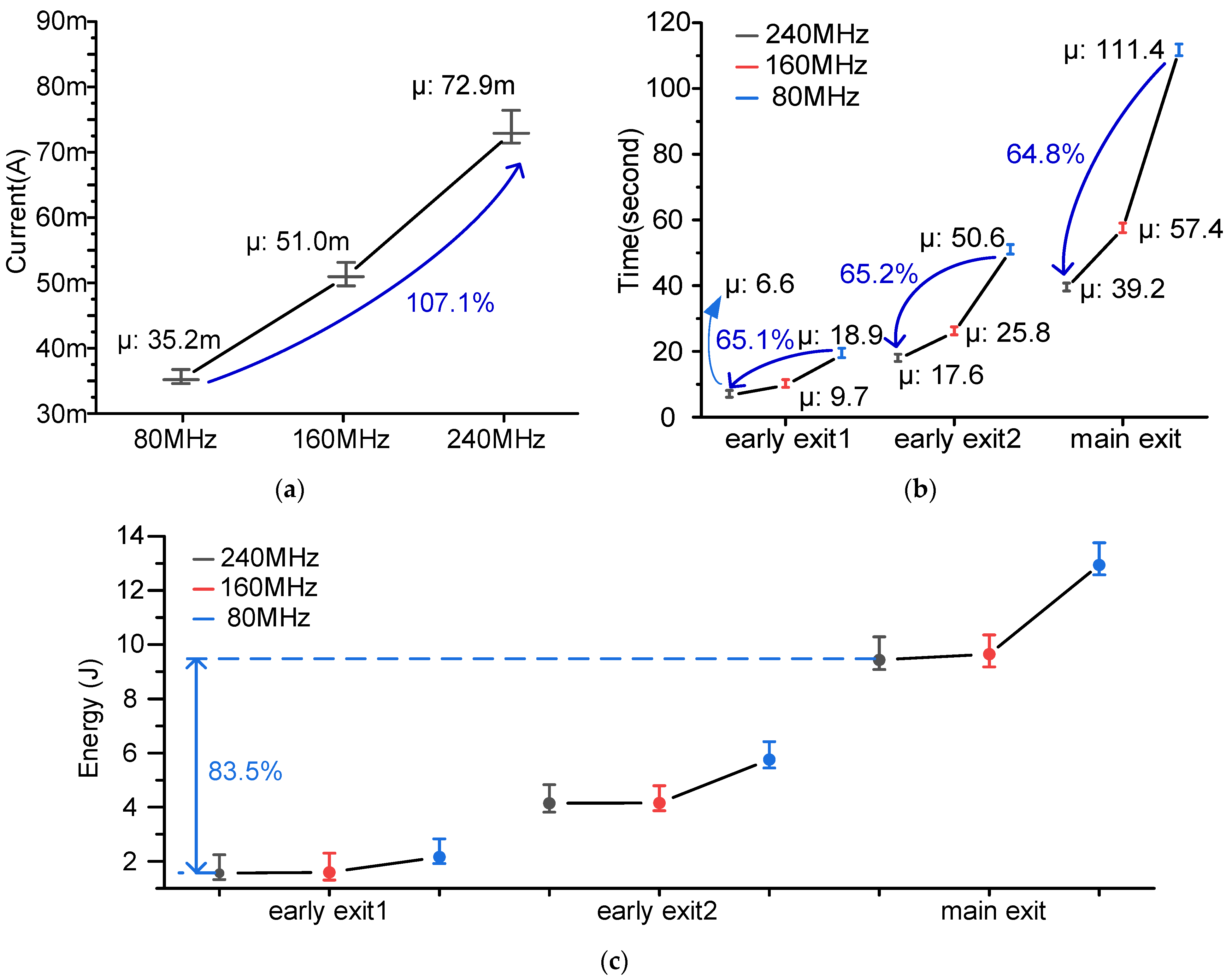
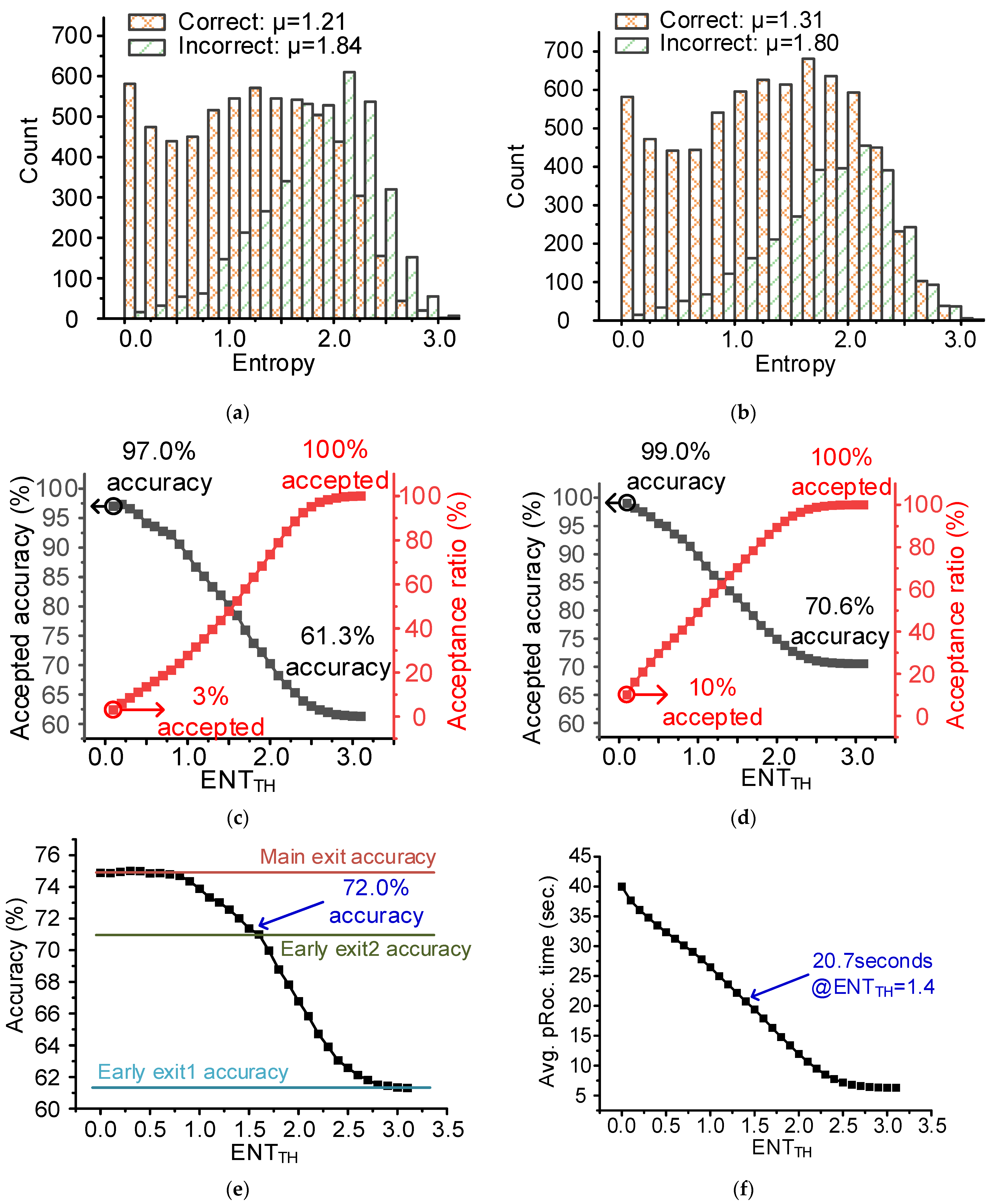
5. Measurement Results
6. Simulation Results for Long Term Operation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lorincz, K.; Kuris, B.; Ayer, S.M.; Patel, S.; Bonato, P.; Welsh, M. Wearable Wireless Sensor Network to Assess Clinical Status in Patients with Neurological Disorders. In Proceedings of the 2007 6th International Conference on Information Processing in Sensor Networks, New York, NY, USA, 25–27 April 2007; pp. 563–564. [Google Scholar] [CrossRef]
- Thiyagarajan, K.; Rajini, G.K.; Maji, D. Cost-effective, Disposable, Flexible and Printable MWCNT-based Wearable Sensor for Human Body Temperature Monitoring. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Ling, T.Y.; Wah, L.H.; McBride, J.W.; Chong, H.M.H.; Pu, S.H. Nanocrystalline Graphite Humidity Sensors for Wearable Breath Monitoring Applications. In Proceedings of the 2019 IEEE International Conference on Sensors and Nanotechnology, Penang, Malaysia, 24–25 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Hester, T.; Hughes, R.; Sherrill, D.M.; Knorr, B.; Akay, M.; Stein, J.; Bonato, P. Using wearable sensors to measure motor abilities following stroke. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks (BSN’06), Cambridge, MA, USA, 3–5 April 2006; pp. 4–8. [Google Scholar] [CrossRef]
- Alavi, A.H.; Hasni, H.; Jiao, P.; Aono, K.; Lajnef, N.; Chakrabartty, S. Self-charging and self-monitoring smart civil infrastructure systems: Current practice and future trends. In Proceedings Volume 10970, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2019; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2019. [Google Scholar] [CrossRef]
- Grosse, C.U.; Krüger, M. Wireless Acoustic Emission Sensor Networks for Structural Health Monitoring in Civil Engineering, 2006. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.159.3947&rep=rep1&type=pdf (accessed on 2 September 2021).
- Ong, J.B.; You, Z.; Mills-Beale, J.; Tan, E.L.; Pereles, B.D.; Ong, K.G. A Wireless, Passive Embedded Sensor for Real-Time Monitoring of Water Content in Civil Engineering Materials. IEEE Sens. J. 2008, 8, 2053–2058. [Google Scholar] [CrossRef]
- Shi, Z.; Chen, Y.; Yu, M.; Zhou, S.; Al-Khanferi, N. Development and Field Evaluation of a Distributed Microchip Downhole Measurement System. Paper presented at the SPE Digital Energy Conference and Exhibition, The Woodlands, TX, USA, 3–5 March 2015. [Google Scholar]
- Iyer, V.; Najafi, A.; James, J.; Fuller, S.; Gollakota, S. Wireless steerable vision for live insects and insect-scale robots. Sci. Robot. 2020, 5, eabb0839. [Google Scholar] [CrossRef] [PubMed]
- Iyer, V.; Nandakumar, R.; Wang, A.; Fuller, S.B.; Gollakota, S. Living IoT: A Flying Wireless Platform on Live Insects. In Proceedings of the 25th Annual International Conference on Mobile Computing and Networking (MobiCom’19), New York, NY, USA, 21–25 October 2019. [Google Scholar] [CrossRef] [Green Version]
- Nazari, M.H.; Mujeeb-U-Rahman, M.; Scherer, A. An implantable continuous glucose monitoring microsystem in 0.18µm CMOS. In Proceedings of the 2014 Symposium on VLSI Circuits Digest of Technical Papers, Honolulu, HI, USA, 10–13 June 2014; pp. 1–2. [Google Scholar] [CrossRef]
- Bhamra, H.; Tsai, J.; Huang, Y.; Yuan, Q.; Shah, J.V.; Irazoqui, P. A Subcubic Millimeter Wireless Implantable Intraocular Pressure Monitor Microsystem. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 1204–1215. [Google Scholar] [CrossRef] [PubMed]
- Mercier, P.P.; Lysaght, A.C.; Bandyopadhyay, S.; Chandrakasan, A.P.; Stankovic, K.M. Energy extraction from the biologic battery in the inner ear. Nat. Biotechnol. 2012, 30, 1240–1243. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeong, S.; Kim, Y.; Kim, G.; Blaauw, D. A Pressure Sensing System with ±0.75 mmHg (3σ) Inaccuracy for Battery-Powered Low Power IoT Applications. In Proceedings of the 2020 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 16–19 June 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Cho, M.; Oh, S.; Shi, Z.; Lim, J.; Kim, Y.; Jeong, S. 17.2 A 142 nW Voice and Acoustic Activity Detection Chip for mm-Scale Sensor Nodes Using Time-Interleaved Mixer-Based Frequency Scanning. In Proceedings of the 2019 IEEE International Solid- State Circuits Conference—(ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 278–280. [Google Scholar] [CrossRef]
- Oh, S.; Shi, Y.; Kim, G.; Kim, Y.; Kang, T.; Jeong, S. A 2.5 nJ duty-cycled bridge-to-digital converter integrated in a 13mm3 pressure-sensing system. In Proceedings of the 2018 IEEE International Solid—State Circuits Conference—(ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 328–330. [Google Scholar] [CrossRef]
- Li, Y.; Hamed, E.A.; Zhang, X.; Luna, D.; Lin, J.-S.; Liang, X.; Lee, I. Feasibility of Harvesting Solar Energy for Self-Powered Environmental Wireless Sensor Nodes. Electronics 2020, 9, 2058. [Google Scholar] [CrossRef]
- Wang, J.; An, H.; Zhang, Q.; Kim, H.S.; Blaauw, D.; Sylvester, D. A 40-nm Ultra-Low Leakage Voltage-Stacked SRAM for Intelligent IoT Sensors. IEEE Solid-State Circuits Lett. 2020, 4, 14–17. [Google Scholar] [CrossRef]
- Chuo, L.X.; Feng, Z.; Kim, Y.; Chiotellis, N.; Yasuda, M.; Miyoshi, S. Millimeter-Scale Node-to-Node Radio Using a Carrier Frequency-Interlocking IF Receiver for a Fully Integrated 4 × 4 × 4 mm3 Wireless Sensor Node. IEEE Solid-State Circuits Lett. 2019, 55, 1128–1138. [Google Scholar] [CrossRef]
- Xu, L.; Jang, T.; Lim, J.; Choo, K.; Blaauw, D.; Sylvester, D. 3.3 A 0.51 nW 32 kHz Crystal Oscillator Achieving 2ppb Allan Deviation Floor Using High-Energy-to-Noise-Ratio Pulse Injection. In Proceedings of the 2020 IEEE International Solid- State Circuits Conference—(ISSCC), San Francisco, CA, USA, 16–20 February 2020; pp. 62–64. [Google Scholar] [CrossRef]
- Lee, J.; Saligane, M.; Blaauw, D.; Sylvester, D. A 0.3-V to 1.8–3.3-V Leakage-Biased Synchronous Level Converter for ULP SoCs. IEEE Solid-State Circuits Lett. 2020, 3, 130–133. [Google Scholar] [CrossRef]
- Lee, J.; Zhang, Y.; Dong, Q.; Lim, W.; Saligane, M.; Kim, Y. A Self-Tuning IoT Processor Using Leakage-Ratio Measurement for Energy-Optimal Operation. IEEE J. Solid-State Circuits 2020, 55, 87–97. [Google Scholar] [CrossRef]
- Oh, S.; Cho, M.; Shi, Z.; Lim, J.; Kim, Y.; Jeong, S. An Acoustic Signal Processing Chip with 142-nW Voice Activity Detection Using Mixer-Based Sequential Frequency Scanning and Neural Network Classification. IEEE J. Solid-State Circuits 2019, 54, 3005–3016. [Google Scholar] [CrossRef]
- Jeong, S.; Chen, Y.; Jang, T.; Tsai JM, L.; Blaauw, D.; Kim, H.S.; Sylvester, D. Always-On 12-nW Acoustic Sensing and Object Recognition Microsystem for Unattended Ground Sensor Nodes. IEEE J. Solid-State Circuits 2018, 53, 261–274. [Google Scholar] [CrossRef]
- Choo, K.D.; Xu, L.; Kim, Y.; Seol, J.H.; Wu, X.; Sylvester, D.; Blaauw, D. 5.2 Energy-Efficient Low-Noise CMOS Image Sensor with Capacitor Array-Assisted Charge-Injection SAR ADC for Motion-Triggered Low-Power IoT Applications. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference—(ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 96–98. [Google Scholar] [CrossRef]
- An, H.; Schiferl, S.; Venkatesan, S.; Wesley, T.; Zhang, Q.; Wang, J. An Ultra-Low-Power Image Signal Processor for Hierarchical Image Recognition with Deep Neural Networks. IEEE J. Solid-State Circuits 2020, 56, 1071–1081. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Jia, Z.; Shi, Y.; Hu, J. Intermittent Inference with Nonuniformly Compressed Multi-Exit Neural Network for Energy Harvesting Powered Devices. In Proceedings of the ACM/IEEE Design Automation Conference, San Francisco, CA, USA, 20–24 July 2020. [Google Scholar]
- Gobieski, G.; Lucia, B.; Beckmann, N. Intelligence beyond the Edge: Inference on Intermittent Embedded Systems. In Proceedings of the International Conference on Architectural Support for Programming Languages and Operating Systems, New York, NY, USA, 13–17 April 2019. [Google Scholar]
- Teerapittayanon, S.; McDanel, B.; Kung, H.T. BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks. In Proceedings of the International Conference on Pattern Recognition, Cancun, Mexico, 4–8 December 2016. [Google Scholar]
- Li, Y.; Wu, Y.; Zhang, X.; Hamed, E.; Hu, J.; Lee, I. Developing a Miniature Energy-Harvesting-Powered Edge Device with Multi-Exit Neural Network. In Proceedings of the IEEE International Symposium on Circuits and Systems, Daegu, Korea, 22–28 May 2021. [Google Scholar]
- Zeng, L.; Li, E.; Zhou, Z.; Xu, C. Boomerang: On-Demand Cooperative Deep Neural Network Inference for Edge Intelligence on the Industrial Internet of Things. IEEE Netw. 2019, 33, 96–103. [Google Scholar] [CrossRef]
- GEILIENERGY GLE IFR 14430 400MAH 3.2V 1.28WH. Available online: https://www.glybattery.com/gle-ifr-14430-400mah-3-point-2v-1-point-28wh.html (accessed on 20 August 2021).
- ESP32-CAM Development Board. Available online: https://media.digikey.com/pdf/Data%20Sheets/DFRobot%20PDFs/DFR0602_Web.pdf (accessed on 20 August 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Detail |
|---|---|
| Size | 27 × 40.5 × 4.5 mm |
| Clock Speed | Up to 160 MHz |
| Memory Size | 520 kB built-in SRAM |
| Camera | OV2640/OV7670 |
| Internal Storage | 4 MB SPI Flash |
| External Storage | Micro SD card supported |
| Wireless Communication | WIFI/Bluetooth |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Gao, Y.; Shao, M.; Tonecha, J.T.; Wu, Y.; Hu, J.; Lee, I. Implementation of Multi-Exit Neural-Network Inferences for an Image-Based Sensing System with Energy Harvesting. J. Low Power Electron. Appl. 2021, 11, 34. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea11030034
Li Y, Gao Y, Shao M, Tonecha JT, Wu Y, Hu J, Lee I. Implementation of Multi-Exit Neural-Network Inferences for an Image-Based Sensing System with Energy Harvesting. Journal of Low Power Electronics and Applications. 2021; 11(3):34. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea11030034
Chicago/Turabian StyleLi, Yuyang, Yuxin Gao, Minghe Shao, Joseph T. Tonecha, Yawen Wu, Jingtong Hu, and Inhee Lee. 2021. "Implementation of Multi-Exit Neural-Network Inferences for an Image-Based Sensing System with Energy Harvesting" Journal of Low Power Electronics and Applications 11, no. 3: 34. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea11030034