Dynamic Improvement with a Feedforward Control Strategy of Bidirectional DC-DC Converter for Battery Charging and Discharging



Abstract
:1. Introduction
2. Circuit Description and Operational Principles
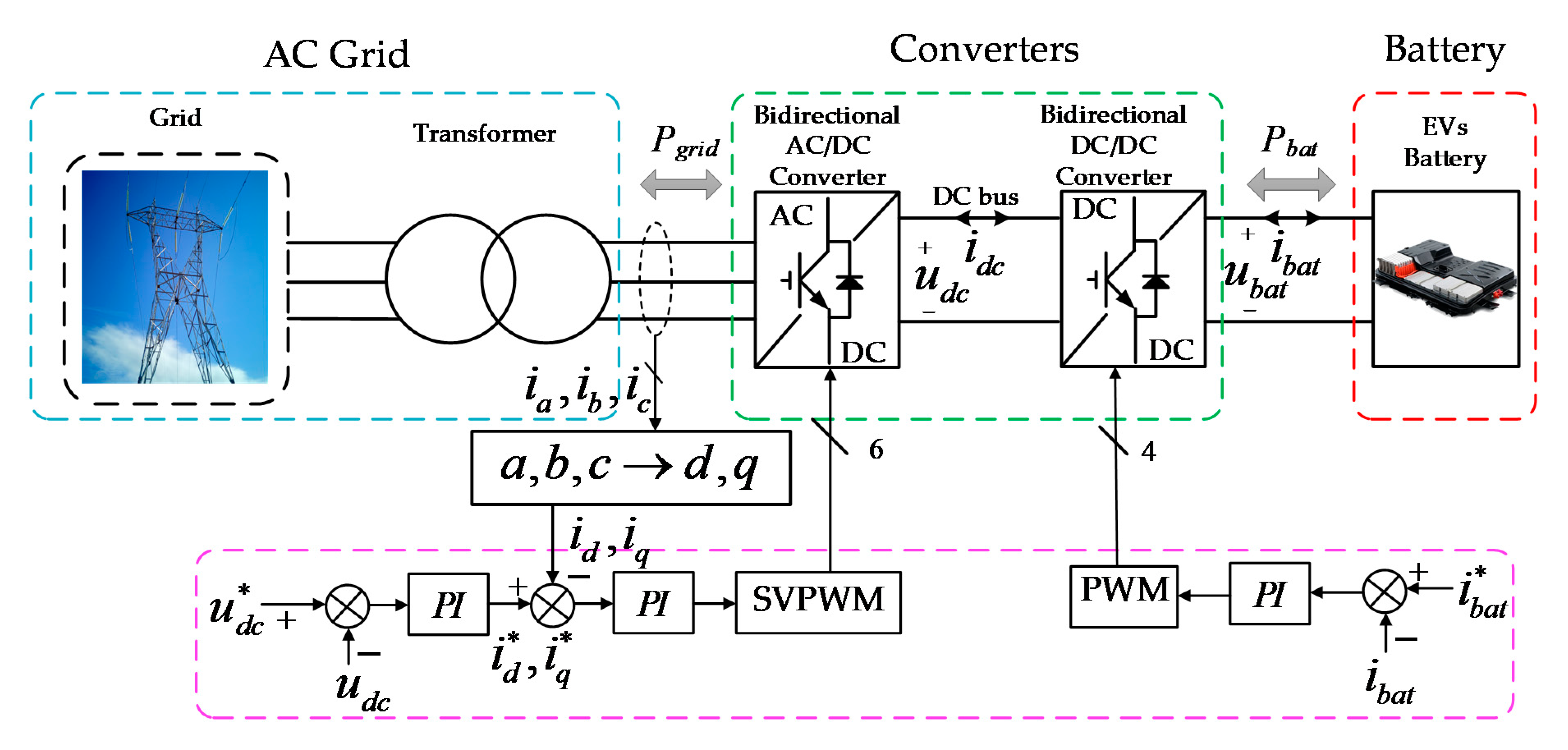
2.1. System Structure
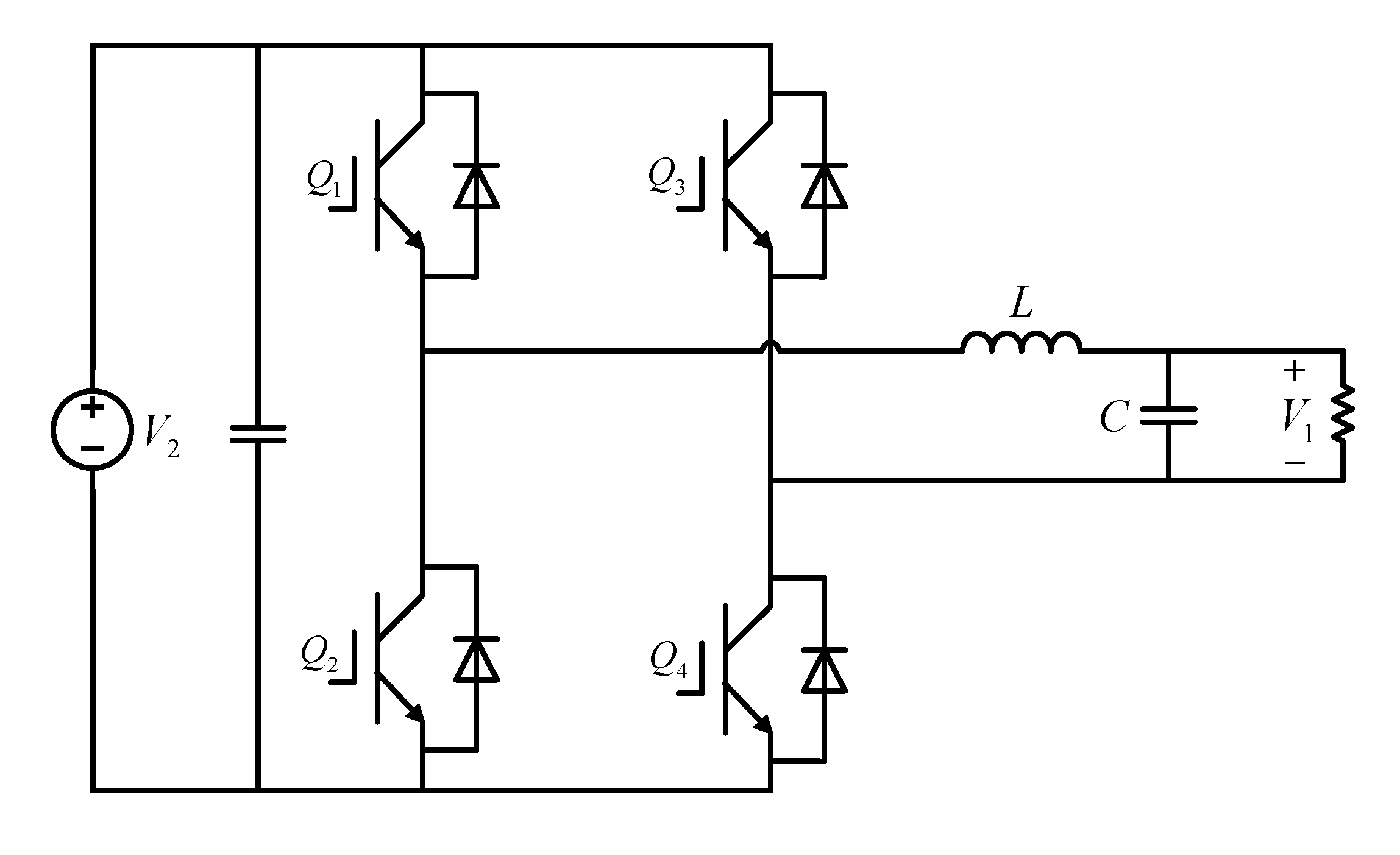
2.2. Circuit Description
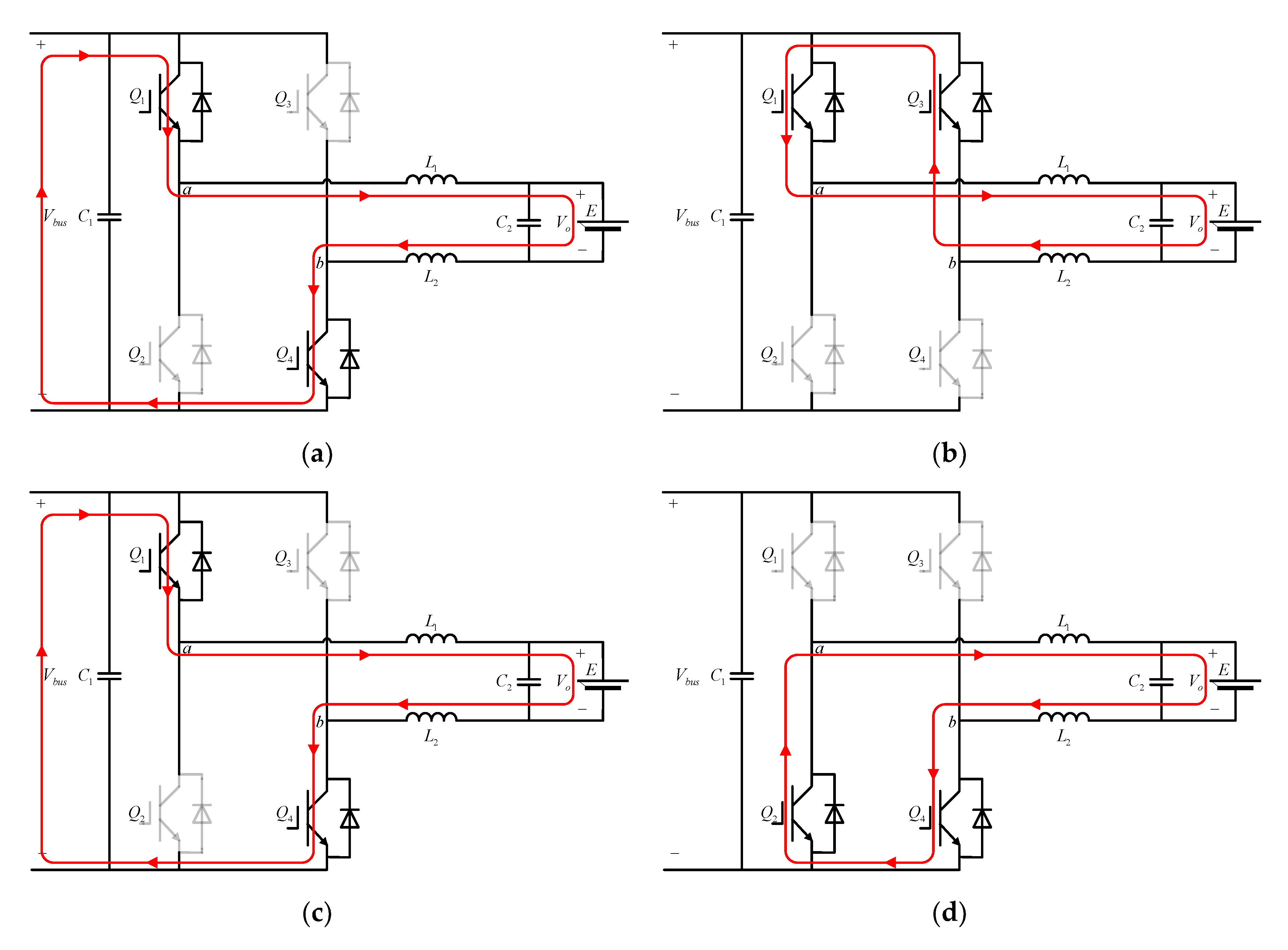
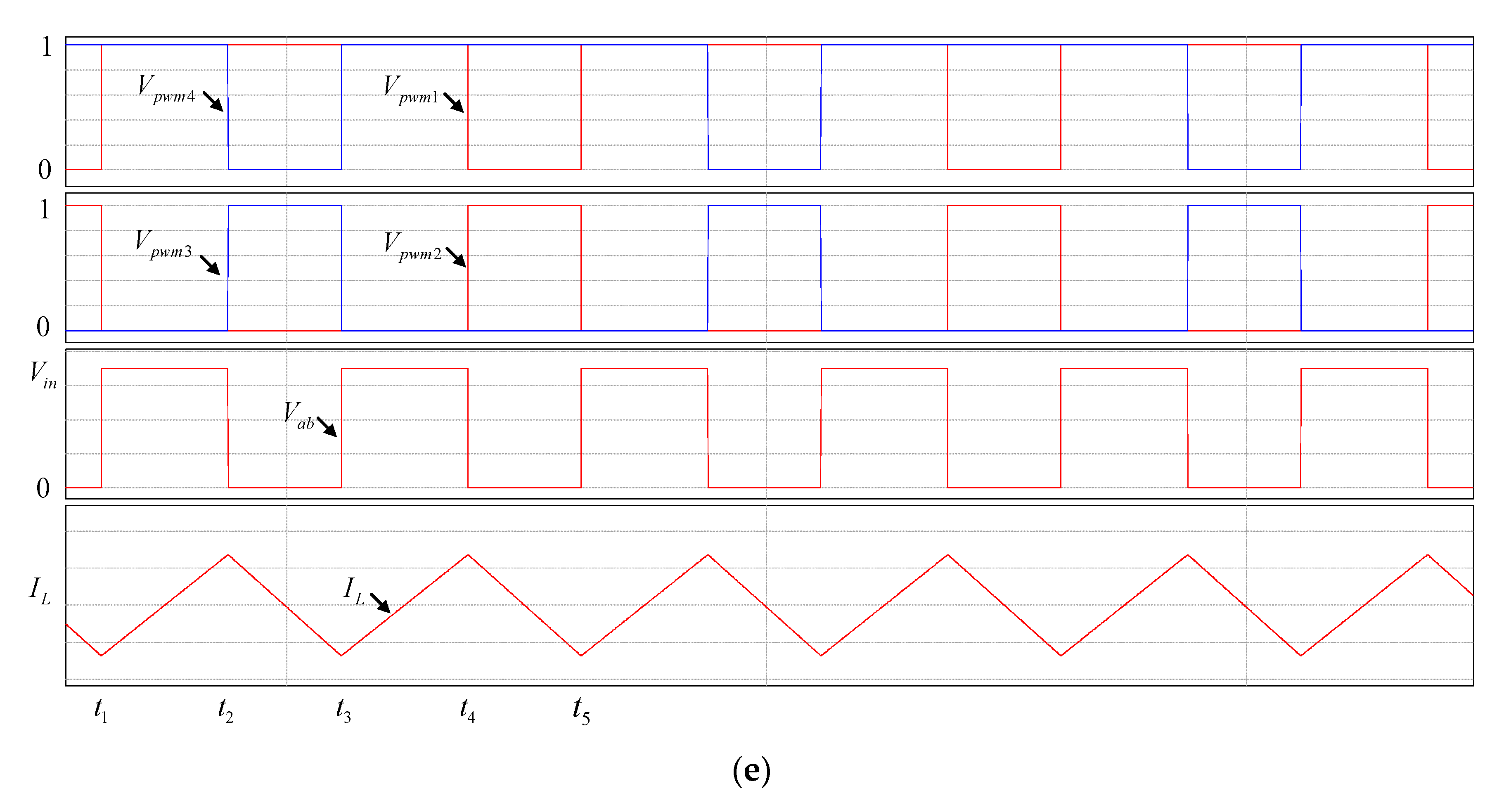
2.3. Operational Principles
3. Model of the Bidirectional DC-DC Converter
4. Controller Design of Bidirectional DC-DC Converter
5. Simulation and Experiment Results
5.1. Simulation Study
5.2. Experiment Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cornea, O.; Andreescu, G.; Muntean, N.; Hulea, D. Bidirectional Power Flow Control in a DC Microgrid Through a Switched-Capacitor Cell Hybrid DC-DC Converter. IEEE Trans. Ind. Electron. 2017, 64, 3012–3022. [Google Scholar] [CrossRef]
- Zhao, B.; Yu, Q.; Sun, W. Extended-Phase-Shift Control of Isolated Bidirectional DC–DC Converter for Power Distribution in Microgrid. IEEE Trans. Power Electron. 2012, 27, 4667–4680. [Google Scholar] [CrossRef]
- Xue, F.; Yu, R.; Huang, A.Q. A 98.3% Efficient GaN Isolated Bidirectional DC–DC Converter for DC Microgrid Energy Storage System Applications. IEEE Trans. Ind. Electron. 2017, 64, 9094–9103. [Google Scholar] [CrossRef]
- Manandhar, U.; Tummuru, N.R.; Kollimalla, S.K.; Ukil, A.; Beng, G.H.; Kalpesh, C. Validation of Faster Joint Control Strategy for Battery-and Supercapacitor-Based Energy Storage System. IEEE Trans. Ind. Electron. 2018, 65, 3286–3295. [Google Scholar] [CrossRef]
- Lu, S.; Wang, L.; Lo, T.; Prokhorov, A.V. Integration of Wind Power and Wave Power Generation Systems Using a DC Microgrid. IEEE Trans. Ind. Appl. 2015, 51, 2753–2761. [Google Scholar] [CrossRef]
- Rocabert, J.; Capó-Misut, R.; Muñoz-Aguilar, R.S.; Candela, J.L.; Rodriguez, P. Control of Energy Storage System Integrating Electrochemical Batteries and Supercapacitors for Grid-Connected Applications. IEEE Trans. Ind. Appl. 2019, 55, 1853–1862. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, B.; Manandhar, U.; Gooi, H.B.; Foo, G. A Model Predictive Current Controlled Bidirectional Three-Level DC/DC Converter for Hybrid Energy Storage System in DC Microgrids. IEEE Trans. Power Electron. 2019, 34, 4025–4030. [Google Scholar] [CrossRef]
- Amjadi, Z.; Williamson, S.S. Prototype Design and Controller Implementation for a Battery-Ultracapacitor Hybrid Electric Vehicle Energy Storage System. IEEE Trans. Smart Grid 2012, 3, 332–340. [Google Scholar] [CrossRef]
- Khan, M.A.; Ahmed, A.; Husain, I.; Sozer, Y.; Badawy, M. Performance Analysis of Bidirectional DC–DC Converters for Electric Vehicles. IEEE Trans. Ind. Appl. 2015, 51, 3442–3452. [Google Scholar] [CrossRef]
- Vu, V.; Tran, D.; Choi, W. Implementation of the Constant Current and Constant Voltage Charge of Inductive Power Transfer Systems with the Double-Sided LCC Compensation Topology for Electric Vehicle Battery Charge Applications. IEEE Trans. Power Electron. 2018, 33, 7398–7410. [Google Scholar] [CrossRef] [Green Version]
- Sha, D.; Chen, D.; Zhang, J. A Bidirectional Three-Level DC–DC Converter with Reduced Circulating Loss and Fully ZVS Achievement for Battery Charging/Discharging. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 993–1003. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.; Ryu, K.; Won, C. An Energy Storage System’s Operational Management and Control Method Considering a Battery System. Electronics 2020, 9, 356. [Google Scholar] [CrossRef] [Green Version]
- Eren, S.; Pahlevani, M.; Bakhshai, A.; Jain, P. A Digital Current Control Technique for Grid-Connected AC/DC Converters Used for Energy Storage Systems. IEEE Trans. Power Electron. 2017, 32, 3970–3988. [Google Scholar] [CrossRef]
- Pahlevani, M.; Jain, P. A Fast DC-Bus Voltage Controller for Bidirectional Single-Phase AC/DC Converters. IEEE Trans. Power Electron. 2015, 30, 4536–4547. [Google Scholar] [CrossRef]
- Ryu, M.; Kim, H.; Baek, J.; Kim, H.; Jung, J. Effective Test Bed of 380-V DC Distribution System Using Isolated Power Converters. IEEE Trans. Ind. Electron. 2015, 62, 4525–4536. [Google Scholar] [CrossRef]
- Dusmez, S.; Khaligh, A.; Hasanzadeh, A. A Zero-Voltage-Transition Bidirectional DC/DC Converter. IEEE Trans. Ind. Electron. 2015, 62, 3152–3162. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, X.; Yin, C.; Cheng, S. Analysis and Research of a Soft-Switching Bidirectional DC–DC Converter Without Auxiliary Switches. IEEE Trans. Ind. Electron. 2018, 65, 1196–1204. [Google Scholar] [CrossRef]
- Jain, M.; Daniele, M.; Jain, P.K. A bidirectional DC-DC converter topology for low power application. IEEE Trans. Power Electron. 2000, 15, 595–606. [Google Scholar] [CrossRef] [Green Version]
- Kisacikoglu, M.C.; Kesler, M.; Tolbert, L.M. Single-Phase On-Board Bidirectional PEV Charger for V2G Reactive Power Operation. IEEE Trans. Smart Grid 2015, 6, 767–775. [Google Scholar] [CrossRef]
- Jang, Y.; Jovanović, M.M.; Kumar, M.; Ruiz, J.M.; Lu, R.; Wei, T. Isolated, Bi-Directional DC-DC Converter for Fuel Cell Electric Vehicle Applications. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1674–1681. [Google Scholar]
- He, P.; Khaligh, A. Comprehensive Analyses and Comparison of 1 kW Isolated DC–DC Converters for Bidirectional EV Charging Systems. IEEE Trans. Transp. Electrif. 2017, 3, 147–156. [Google Scholar] [CrossRef]
- Silvestre, J. Half-bridge bidirectional DC-DC Converter for small Electric Vehicle. In Proceedings of the 2008 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 11–13 June 2008; pp. 884–888. [Google Scholar]
- Hegazy, O.; Mierlo, J.V.; Lataire, P. Analysis, Modeling, and Implementation of a Multidevice Interleaved DC/DC Converter for Fuel Cell Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2012, 27, 4445–4458. [Google Scholar] [CrossRef]
- Yao, Z.; Lu, S. A Simple Approach to Enhance the Effectiveness of Passive Currents Balancing in an Interleaved Multiphase Bidirectional DC-DC Converter. IEEE Trans. Power Electron. 2019, 34, 7242–7255. [Google Scholar] [CrossRef]
- Thang, T.V.; Ahmed, A.; Kim, C.; Park, J. Flexible System Architecture of Stand-Alone PV Power Generation with Energy Storage Device. IEEE Trans. Energy Convers. 2015, 30, 1386–1396. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T.; Manias, S. Direct Voltage Control of DC-DC Boost Converters Using Enumeration-Based Model Predictive Control. IEEE Trans. Power Electron. 2014, 29, 968–978. [Google Scholar] [CrossRef]
- Sahoo, S.K.; Kishore, N.K. Battery state-of-charge-based control and frequency regulation in the MMG system using fuzzy logic. IET Gener. Transm. Distrib. 2020, 14, 2698–2709. [Google Scholar] [CrossRef]
- Bae, J.; Nguyen, B.L.H.; Cha, H. A Novel Battery Formation Equipment Using Two-Stage Differential Buck Converter. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016; pp. 740–744. [Google Scholar]
- Sreekumar, L.; Es, S. Double Frequency Pulse Width Modulation for Type-1 Common-ground Transformerless Inverter. In Proceedings of the 2019 National Power Electronics Conference (NPEC), Tiruchirappalli, India, 13–15 December 2019; pp. 1–6. [Google Scholar]
- Erickson, R.; Maksimovic, D. Fundamentals of Power Electronics; Power Electronics Ser. Springer: New York, NY, USA, 2001. [Google Scholar]
- Lu, C.; Yang, S.; Wei, X.; Zhang, X. Research on the Technology of the Neutral-Point Voltage Balance and Dual-Loop Control Scheme for Three-Level PWM Inverter. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012; pp. 1–4. [Google Scholar]
- Lee, M.; Yeh, C.; Yu, O.; Kim, J.; Choe, J.; Lai, J. Modeling and Control of Three-Level Boost Rectifier Based Medium-Voltage Solid-State Transformer for DC Fast Charger Application. IEEE Trans. Transp. Electrif. 2019, 5, 890–902. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Value |
|---|---|---|
| DC-bus voltage | 700 V | |
| DC inductance | 1.6 mH | |
| DC-bus capacitance | 2.1 mF | |
| Output capacitance | 2.1 mF | |
| Resistance | 2 Ω | |
| Switching frequency | 5 kHz | |
| Resistance of the inductance | 0.1 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Gu, X.; Yang, Y.; Tang, T. Dynamic Improvement with a Feedforward Control Strategy of Bidirectional DC-DC Converter for Battery Charging and Discharging. Electronics 2020, 9, 1738. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101738
Han J, Gu X, Yang Y, Tang T. Dynamic Improvement with a Feedforward Control Strategy of Bidirectional DC-DC Converter for Battery Charging and Discharging. Electronics. 2020; 9(10):1738. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101738
Chicago/Turabian StyleHan, Jingang, Xin Gu, Yi Yang, and Tianhao Tang. 2020. "Dynamic Improvement with a Feedforward Control Strategy of Bidirectional DC-DC Converter for Battery Charging and Discharging" Electronics 9, no. 10: 1738. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101738