Improved Finite Set-Predictive Torque Control of PMSM Fed by Indirect Matrix Converter with Discrete Space Vector Modulation


Abstract
:1. Introduction
2. Fundamentals Grid Side Control in IMC
2.1. IMC Circuit Configuration
2.2. Modulation Technique for Grid-Side Control of IMC
3. Fundamental FS-PTC of PMSM
4. Proposed FS-PTC for an IMC-Fed PMSM
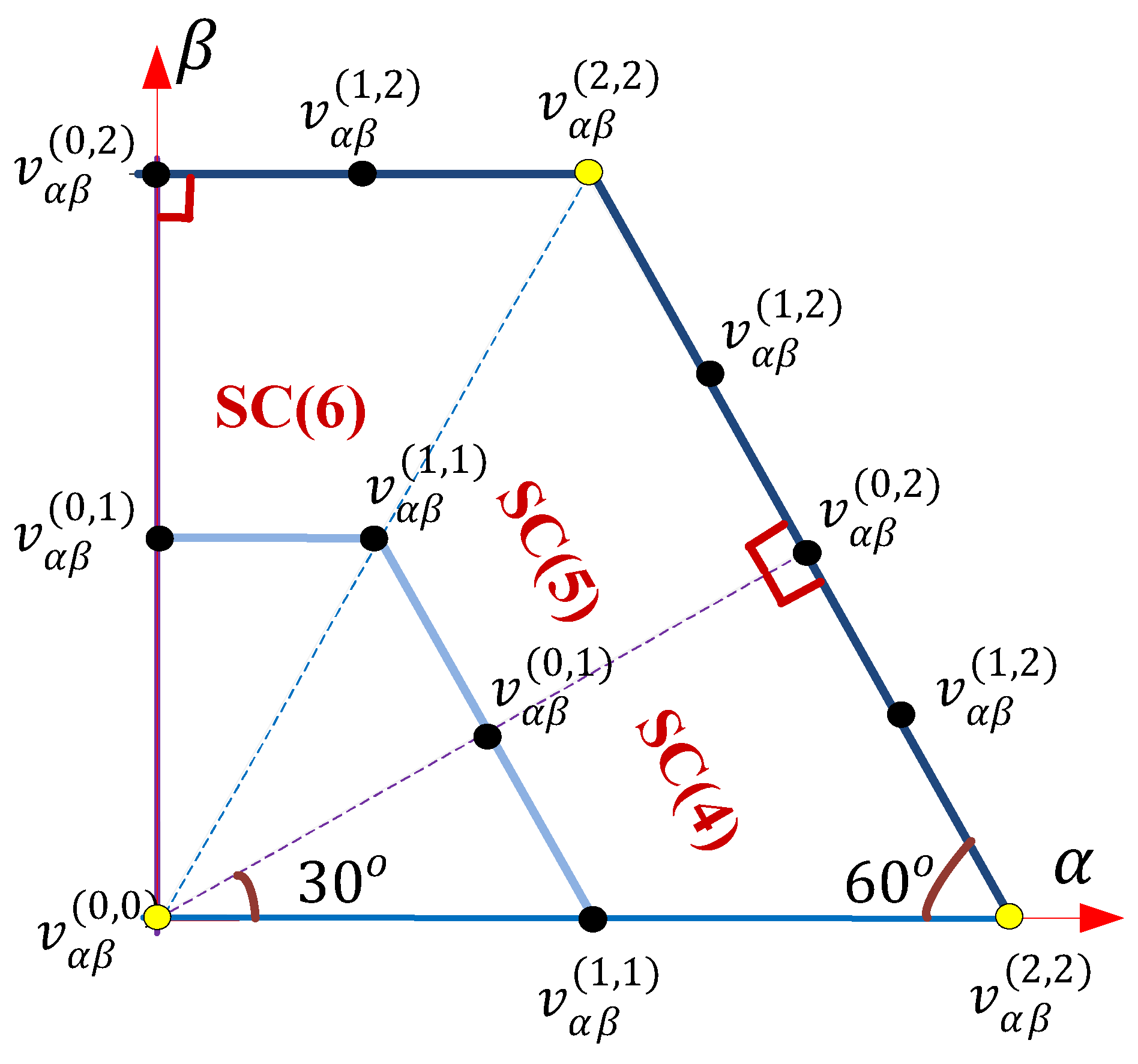
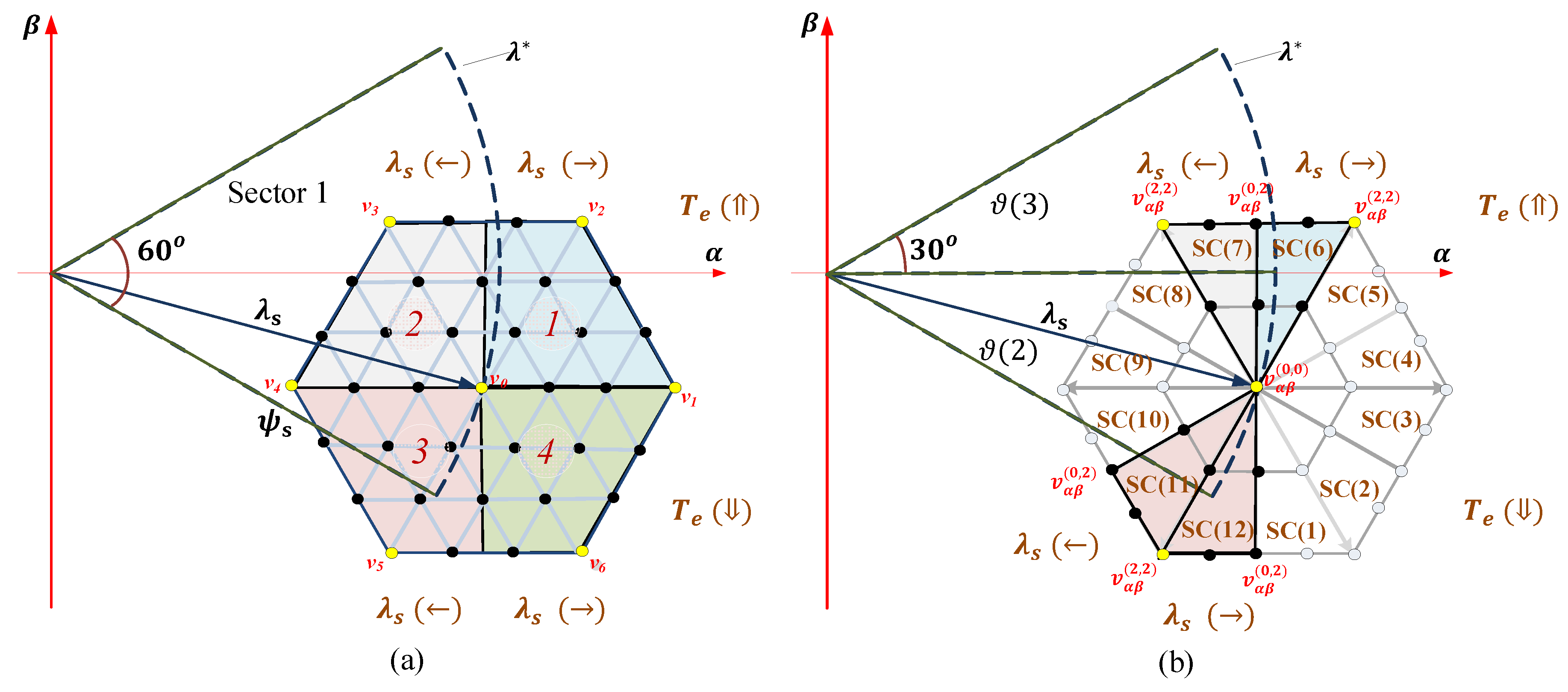
4.1. Synthesis of Virtual Voltage Vectors
4.2. Predicted Voltage Vectors
4.3. Delay Compensation
4.4. Overall Control Algorithm for VSI Stage
- Obtain the averaged DC-link voltage vDC.avg from the CSR stage.
- Estimate the motor variables: stator flux and electrical torque.
- Predict the stator current, stator flux, and torque by the application of the optimal VV.
- Obtain the optimal SVD region according to the electrical torque and flux errors at the specified flux angle based on Table 3.
- Calculate the VVs in the frame using the rectified voltage vDC.avg based on the selected SVD region using Equations (11) and (12), and according to the coefficients in Table 2.
- Predict the stator flux, stator current, and torque taking into consideration one step forward to eliminate the delay. Then, the calculated VVs from the selected SVD region are evaluated using the cost function in Equation (14).
- Choose the optimal VV vopt that reduces the cost function objectives to use at the next sampling cycle for synchronization with CSR and modulation using a carrier-based PWM.
4.5. Modulation Strategy for VSI of IMC
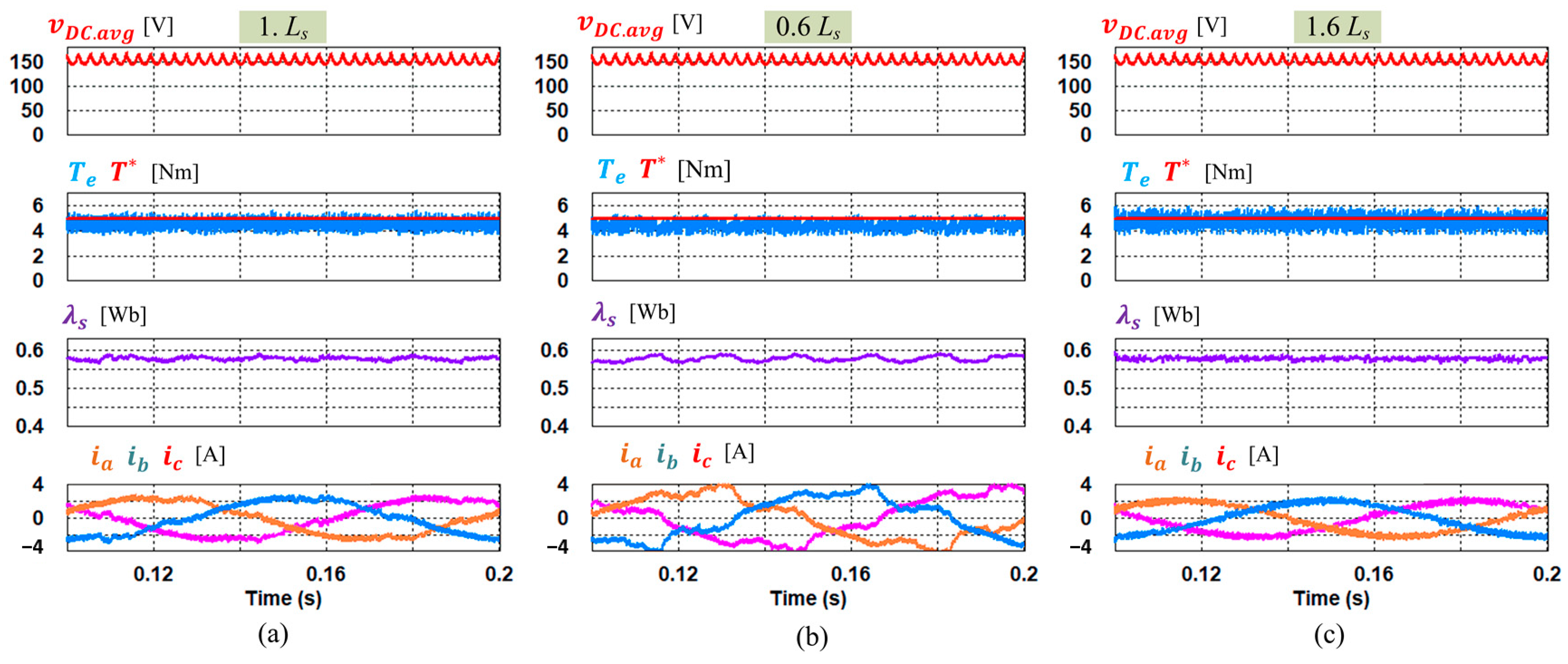
5. Simulation Results
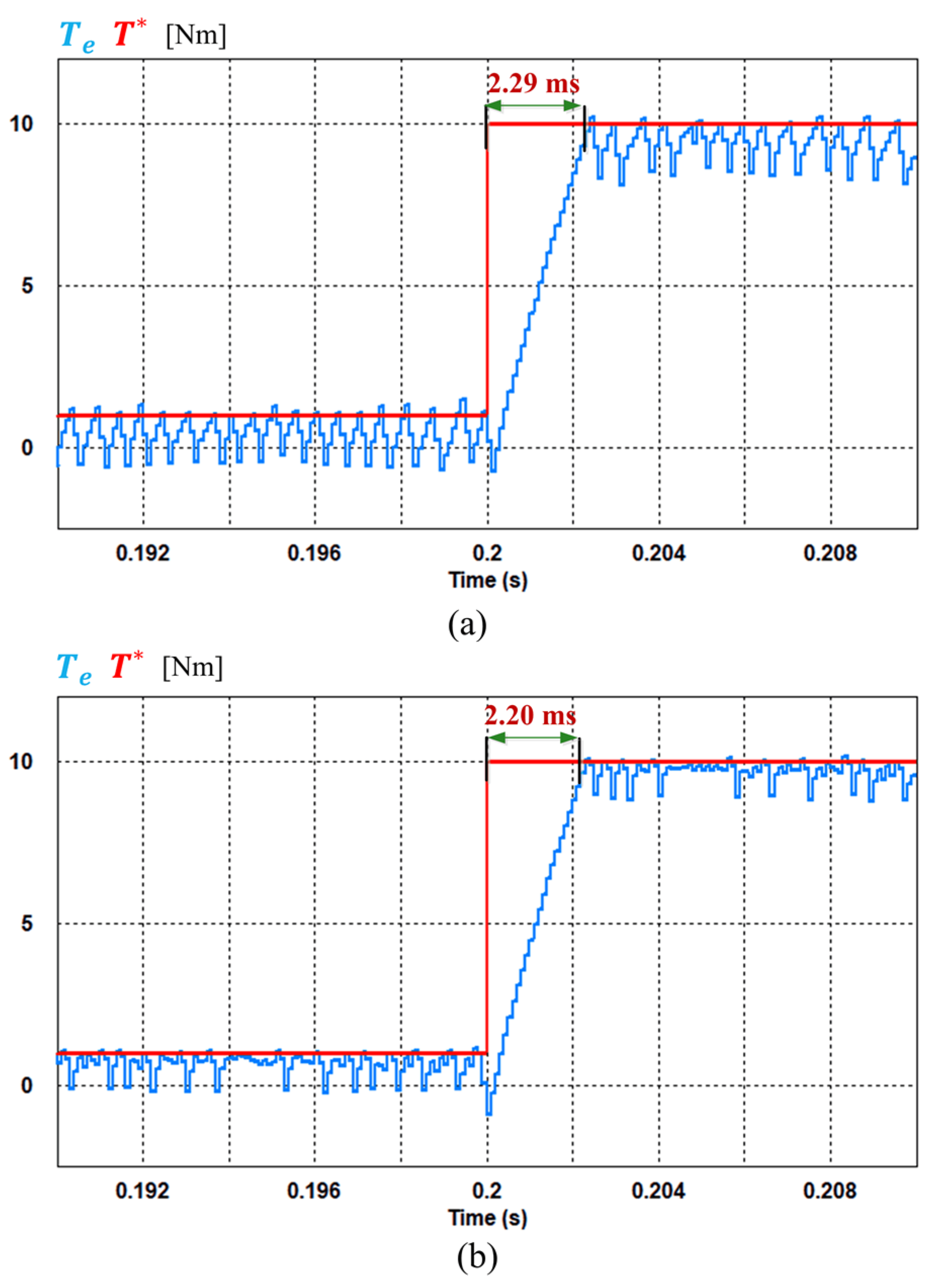
6. Implementation and Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jussila, M.; Tuusa, H. Comparison of simple control strategies of space-vector modulated indirect matrix converter under distorted supply voltage. IEEE Trans. Power Electron. 2007, 22, 139–148. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rivera, M.; Rodríguez, J. A Computationally Efficient Lookup Table Based FCS-MPC for PMSM Drives Fed by Matrix Converters. IEEE Trans. Ind. Electron. 2017, 64, 7645–7654. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodriguez, J. Robustness Improvement of Predictive Current Control Using Prediction Error Correction for Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- López, M.; Rodriguez, J.; Silva, C.; Rivera, M. Predictive torque control of a multidrive system fed by a dual indirect matrix converter. IEEE Trans. Ind. Electron. 2015, 62, 2731–2741. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Su, M.; Wang, H.; Dan, H.; Xiong, W. Indirect Matrix Converter-Based Topology and Modulation Schemes for Enhancing Input Reactive Power Capability. IEEE Trans. Power Electron. 2015, 30, 4669–4681. [Google Scholar] [CrossRef]
- Bak, Y.; Lee, K.B. Constant speed control of a permanent magnet synchronous motor using a reverse matrix converter under variable generator input conditions. IEEE J. Emerg. Sel. Topics Power Electron. 2018, 6, 315–326. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Lee, H. Dual Three-Phase Indirect Matrix Converter with Carrier-Based PWM Method. IEEE Trans. Power Electron. 2014, 29, 569–581. [Google Scholar] [CrossRef]
- Bak, Y.; Lee, K.-B. Reducing switching losses in indirect matrix converter drives: Discontinuous PWM method. J.Power Electron. 2018, 18, 1325–1335. [Google Scholar]
- Rodriguez, J.; Kolar, J.; Espinoza, J.; Rivera, M.; Rojas, C. Predictive torque and flux control of an induction machine fed by an indirect matrix converter. In Proceedings of the IEEE International Conf. on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 1857–1863. [Google Scholar]
- Kim, K.Y.; Bak, Y.; Park, J.-H.; Lee, K.-B. Model predictive control using subdivided voltage vectors for current ripple reduction in an indirect matrix converter. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018 -ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 4104–4108. [Google Scholar]
- Correa, P.; Rodriguez, J.; Rivera, M.; Espinoza, J.R.; Kolar, J.W. Predictive control of an indirect matrix converter. IEEE Trans. Ind. Electron. 2009, 56, 1847–1853. [Google Scholar] [CrossRef]
- Kim, J.K.Y.; Bak, Y.; Lee, K.-B. Predictive current control for indirect matrix converter with reduced current ripple. J. Power Electron. 2020, 20, 443–454. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortes, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Rivera, M.; Rodriguez, J.; Wu, B.; Espinoza, J.R.; Rojas, C.A. Current Control for an Indirect Matrix Converter with Filter Resonance Mitigation. IEEE Trans. Ind. Electron. 2012, 59, 71–79. [Google Scholar] [CrossRef]
- Adase, L.A.; Alsofyani, I.M.; Lee, K. Predictive Torque Control with Simple Duty-Ratio Regulator of PMSM for Minimizing Torque and Flux Ripples. IEEE Access 2020, 8, 2373–2381. [Google Scholar] [CrossRef]
- Hakami, S.S.; Alsofyani, I.M.; Lee, K. Torque Ripple Reduction and Flux-Droop Minimization of DTC With Improved Interleaving CSFTC of IM Fed by Three-Level NPC Inverter. IEEE Access 2019, 7, 184266–184275. [Google Scholar] [CrossRef]
- Alsofyani, I.; Lee, K. Enhanced Performance of Constant Frequency Torque Controller-Based Direct Torque Control of Induction Machines with Increased Torque-Loop Bandwidth. IEEE Trans. Ind. Electron. 2020, 67, 10168–10179. [Google Scholar] [CrossRef]
- Lee, J.; Lee, J.; Moon, H.; Lee, K. An Improved Finite-Set Model Predictive Control Based on Discrete Space Vector Modulation Methods for Grid-Connected Three-Level Voltage Source Inverter. IEEE J. Emerg. Sel. Topics Power Electron. 2018, 6, 1744–1760. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Lee, K.B. Finite-Set Predictive Torque Control Based on Sub-divided Voltage Vectors of PMSM with Deadbeat Control and Discrete Space Vector Modulation. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1853–1857. [Google Scholar]
- Casadei, D.; Serra, G.; Tani, K. Implementation of a direct control algorithm for induction motors based on discrete space vector modulation. IEEE Trans. Power Electron. 2000, 15, 769–777. [Google Scholar] [CrossRef]
- Guo, Y.; Sun, H.; Zhang, Y.; Liu, Y.; Li, X.; Xue, Y. Duty-Cycle Predictive Control of Quasi-Z-Source Modular Cascaded Converter Based Photovoltaic Power System. IEEE Access 2020, 8, 172734–172746. [Google Scholar] [CrossRef]
- Zhou, Z.; Xia, C.; Yan, Y.; Wang, Z.; Shi, T. Torque Ripple Minimization of Predictive Torque Control for PMSM With Extended Control Set. IEEE Trans. Ind. Electron. 2017, 64, 6930–6939. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Xie, W.; Wang, F.; Dou, M.; Kennel, R.M.; Lorenz, R.D.; Gerling, D. Deadbeat Model-Predictive Torque Control with Discrete Space-Vector Modulation for PMSM Drives. IEEE Trans. Ind. Electron. 2017, 63, 3537–3547. [Google Scholar] [CrossRef]
- Moon, H.; Lee, J.; Lee, K. A Robust Deadbeat Finite Set Model Predictive Current Control Based on Discrete Space Vector Modulation for a Grid-Connected Voltage Source Inverter. IEEE Trans. Energy Convers. 2018, 33, 1719–1728. [Google Scholar] [CrossRef]
- Hu, J. Improved Dead-Beat Predictive DPC Strategy of Grid-Connected DC-AC Converters with Switching Loss Minimization and Delay Compensations. IEEE Trans. Ind. Inform. 2013, 8, 728–738. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Lee, K.-B. Improved deadbeat FC-MPC based on the discrete space vector modulation method with efficient computation for a grid-connected three-level inverter system. Energies 2019, 12, 3111. [Google Scholar] [CrossRef] [Green Version]
- Moon, H.-C.; Lee, J.-S.; Lee, J.-H.; Lee, K.-B. MPC-SVM method with subdivision strategy for current ripples reduction and neutral-point voltage balance in three-level inverter. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 191–196. [Google Scholar]
- Osman, I.; Xiao, D.; Alam, K.S.; Akter, M.P.; Shakib, S.M.S.I.; Rahman, M.F. Discrete Space Vector Modulation Based Model Predictive Torque Control with No Sub-Optimization. IEEE Trans. Ind. Electron. 2020, 67, 8164–8174. [Google Scholar] [CrossRef]
- Kim, K.Y.; Bak, Y.; Lee, K. Model Predictive Current Control for a PMSM Fed by an Indirect Matrix Converter with Torque Ripple Reduction. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1891–1896. [Google Scholar]
- Amiri, M.; Milimonfared, J.; Khaburi, D.A. Predictive Torque Control Implementation for Induction Motors Based on Discrete Space Vector Modulation. IEEE Trans. Ind. Electron. 2018, 65, 6881–6889. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Carrasco, J.M.; Martinez, O.; Rodriguez, J.; Cortes, P.; Kouro, S. Model predictive control with constant switching frequency using a discrete space vector modulation with virtual state vectors. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar]
- Alsofyani, I.M.; Lee, K.-B. Predictive Torque Control Based on Discrete Space Vector Modulation of PMSM without Flux Error-Sign and Voltage-Vector Lookup Table. Electronics 2020, 9, 1542. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | Limit of | on Switch | Modulated Switches | vDC.avg | |
|---|---|---|---|---|---|
| 1 | SuT | SvB | SwB | ||
| 2 | SwB | SuT | SvT | ||
| 3 | SvT | SwB | SuB | ||
| 4 | SuB | SvT | SwT | ||
| 5 | SwT | SuB | SvB | ||
| 6 | SvB | SwT | SuT | ||
| SVD Region | a1 | a2 | a3 | a4 | a5 | a6 |
|---|---|---|---|---|---|---|
| SC(1) | 1 | 1 | –1 | 1 | 0 | 0 |
| SC(2) | −1 | 1 | 1 | 1 | 0 | 0 |
| SC(3) | 0 | 0 | 0 | 0 | 1 | 1 |
| SC(4) | 0 | 0 | 0 | 0 | −1 | 1 |
| SC(5) | 1 | −1 | 1 | 1 | 0 | 0 |
| SC(6) | −1 | −1 | –1 | 1 | 0 | 0 |
| SC(7) | −1 | −1 | 1 | −1 | 0 | 0 |
| SC(8) | 1 | –1 | –1 | –1 | 0 | 0 |
| SC(9) | 0 | 0 | 0 | 0 | −1 | −1 |
| SC(10) | 0 | 0 | 0 | 0 | 1 | −1 |
| SC(11) | −1 | 1 | −1 | −1 | 0 | 0 |
| SC(12) | 1 | 1 | 1 | −1 | 0 | 0 |
| Flux Position | ||||
|---|---|---|---|---|
| (1) | SC(5) | SC(11) | SC(6) | SC(10) |
| (2) | SC(6) | SC(12) | SC(7) | SC(11) |
| (3) | SC(7) | SC(1) | SC(8) | SC(12) |
| (4) | SC(8) | SC(2) | SC(9) | SC(1) |
| (5) | SC(9) | SC(3) | SC(10) | SC(2) |
| (6) | SC(10) | SC(4) | SC(11) | SC(3) |
| (7) | SC(11) | SC(5) | SC(12) | SC(4) |
| (8) | SC(12) | SC(6) | SC(1) | SC(5) |
| (9) | SC(1) | SC(7) | SC(2) | SC(6) |
| (10) | SC(2) | SC(8) | SC(3) | SC(7) |
| (11) | SC(3) | SC(9) | SC(4) | SC(8) |
| (12) | SC(4) | SC(10) | SC(5) | SC(9) |
| PMSM Parameters | |
| Rated torque (N∙m) | 60 |
| Rated current (A) | 19.9 |
| Rated speed (r/min) | 1750 |
| Rated power (kW) | 11 |
| Number of poles | 6 |
| Stator resistance (Ω) | 0.349 |
| Stator inductance (mH) | 15.6 |
| Permanent magnet flux (Wb) | 0.554 |
| LC Filter Parameters | |
| Input filter inductance (mH) | 1.3 |
| Input filter capacitance (μF) | 1.5 |
| Control Method | Conventional FS-PTC | PTC-SVD-1 | PTC-SVD-2 |
|---|---|---|---|
| Number of Predicted vectors | 8 | 3 | 6 |
| IMC implementation | Not safe | Safe | Safe |
| Computation time | 37 µs | 48 µs | 52 µs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsofyani, I.M.; Bak, Y.; Lee, K.-B. Improved Finite Set-Predictive Torque Control of PMSM Fed by Indirect Matrix Converter with Discrete Space Vector Modulation. Electronics 2020, 9, 2133. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9122133
Alsofyani IM, Bak Y, Lee K-B. Improved Finite Set-Predictive Torque Control of PMSM Fed by Indirect Matrix Converter with Discrete Space Vector Modulation. Electronics. 2020; 9(12):2133. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9122133
Chicago/Turabian StyleAlsofyani, Ibrahim Mohd, Yeongsu Bak, and Kyo-Beum Lee. 2020. "Improved Finite Set-Predictive Torque Control of PMSM Fed by Indirect Matrix Converter with Discrete Space Vector Modulation" Electronics 9, no. 12: 2133. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9122133