
3-Dimensional Modeling and Simulation of the Cloud Based on Cellular Automata and Particle System


Abstract
:1. Introduction
2. Simulating Uniform Cloud Particles Using the Particle System
2.1. Overview of the Particle System
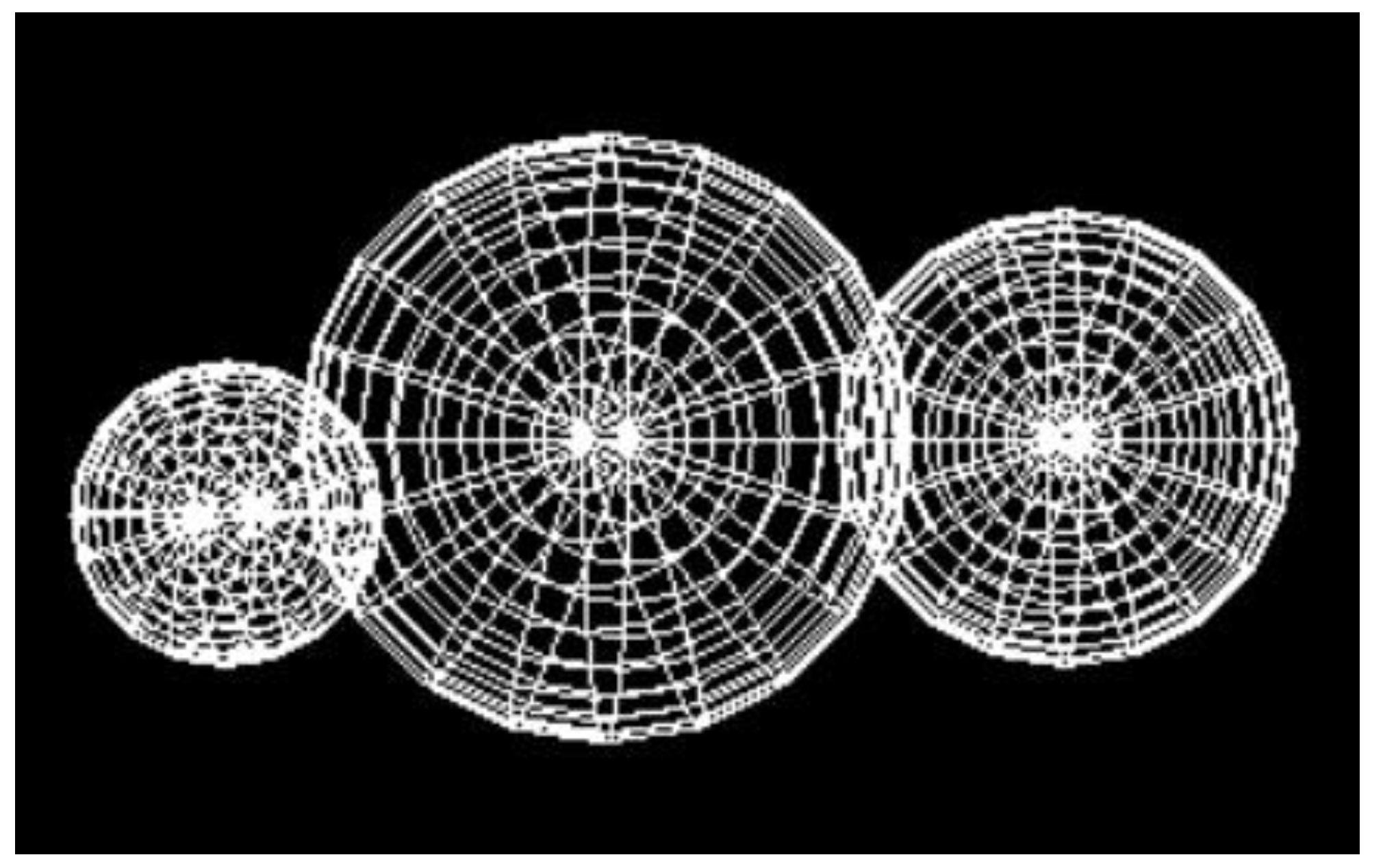
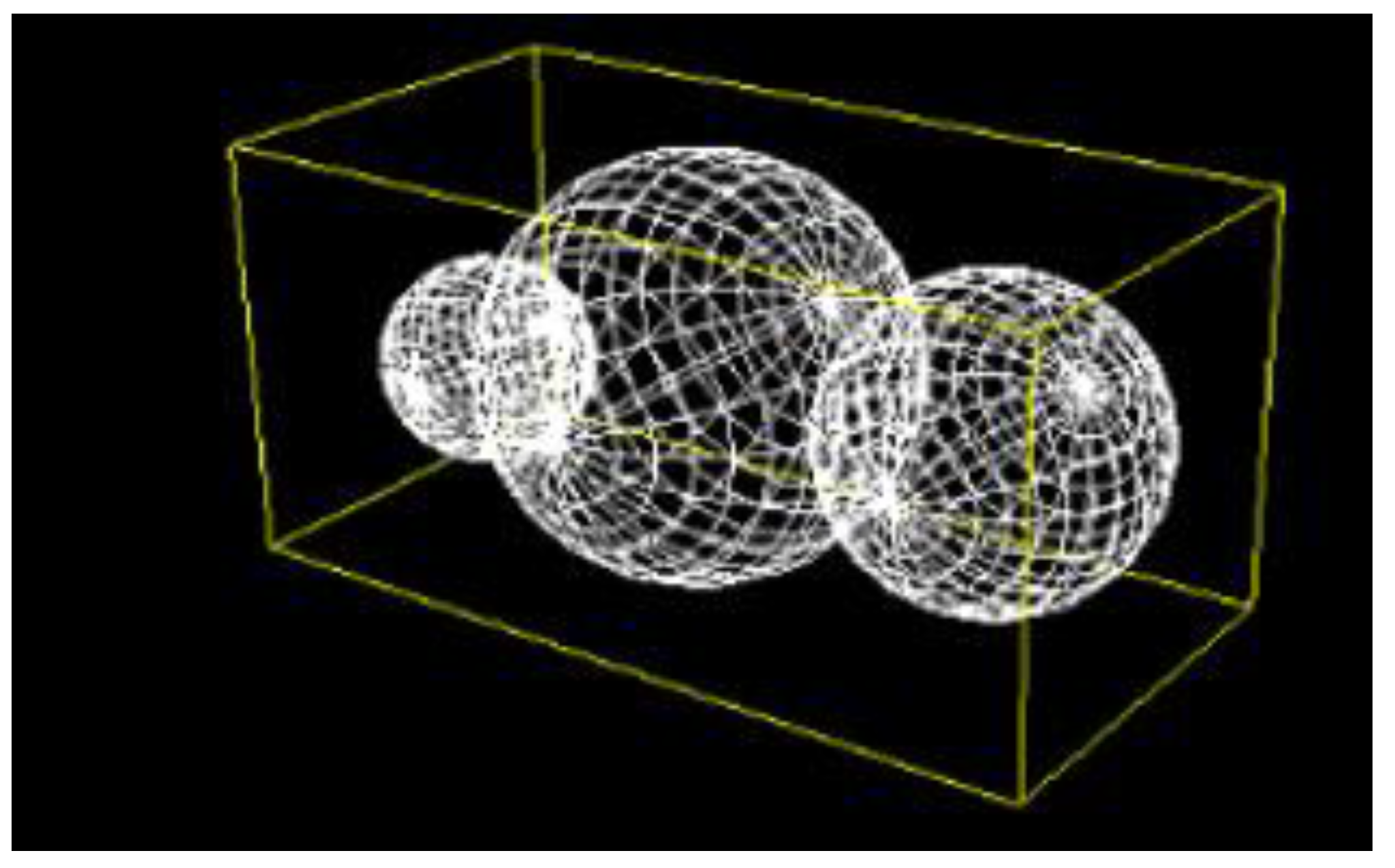
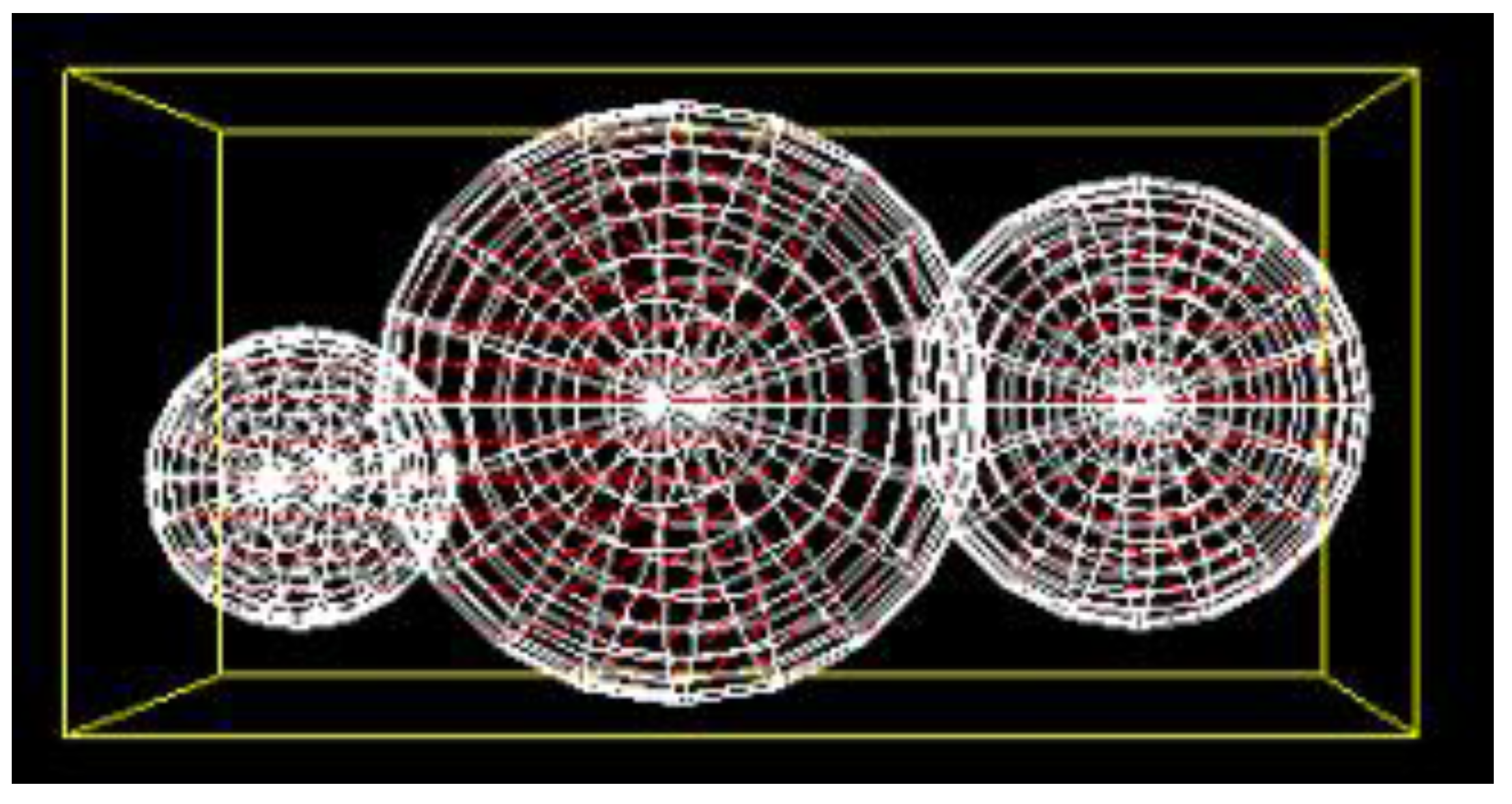
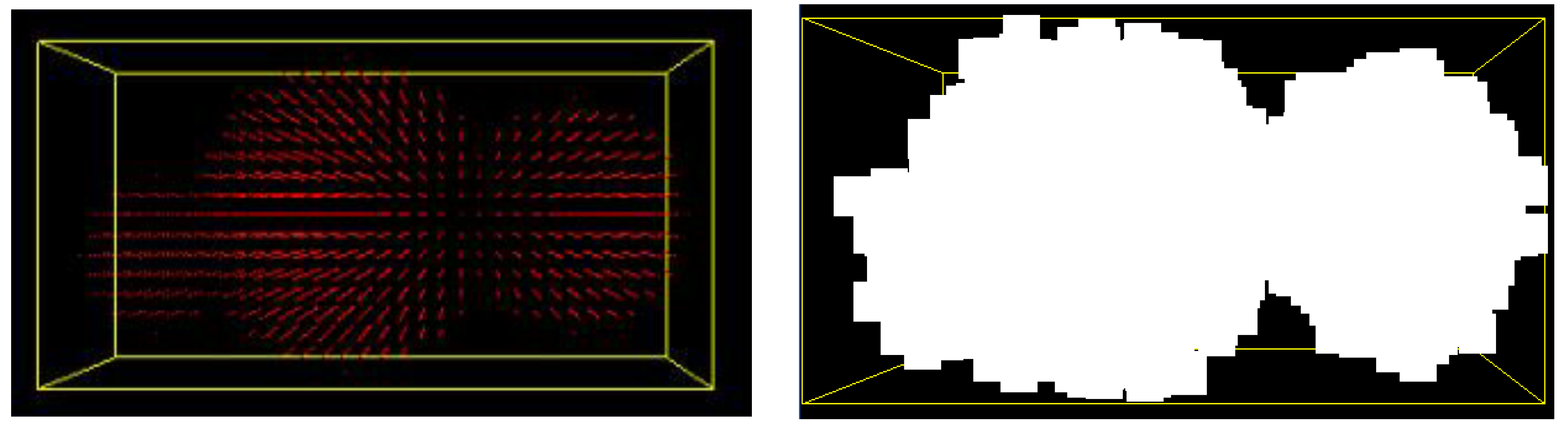
2.2. Using Spheres to Simulate the Cloud Contour
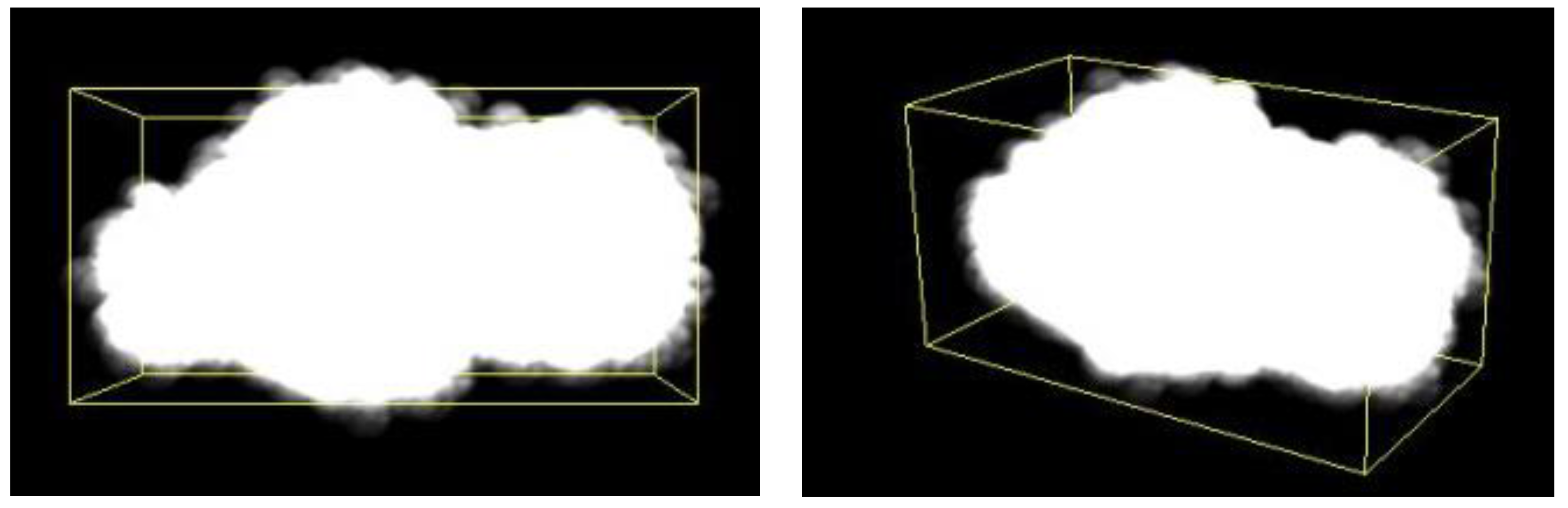
2.3. Solving the Bounding Box
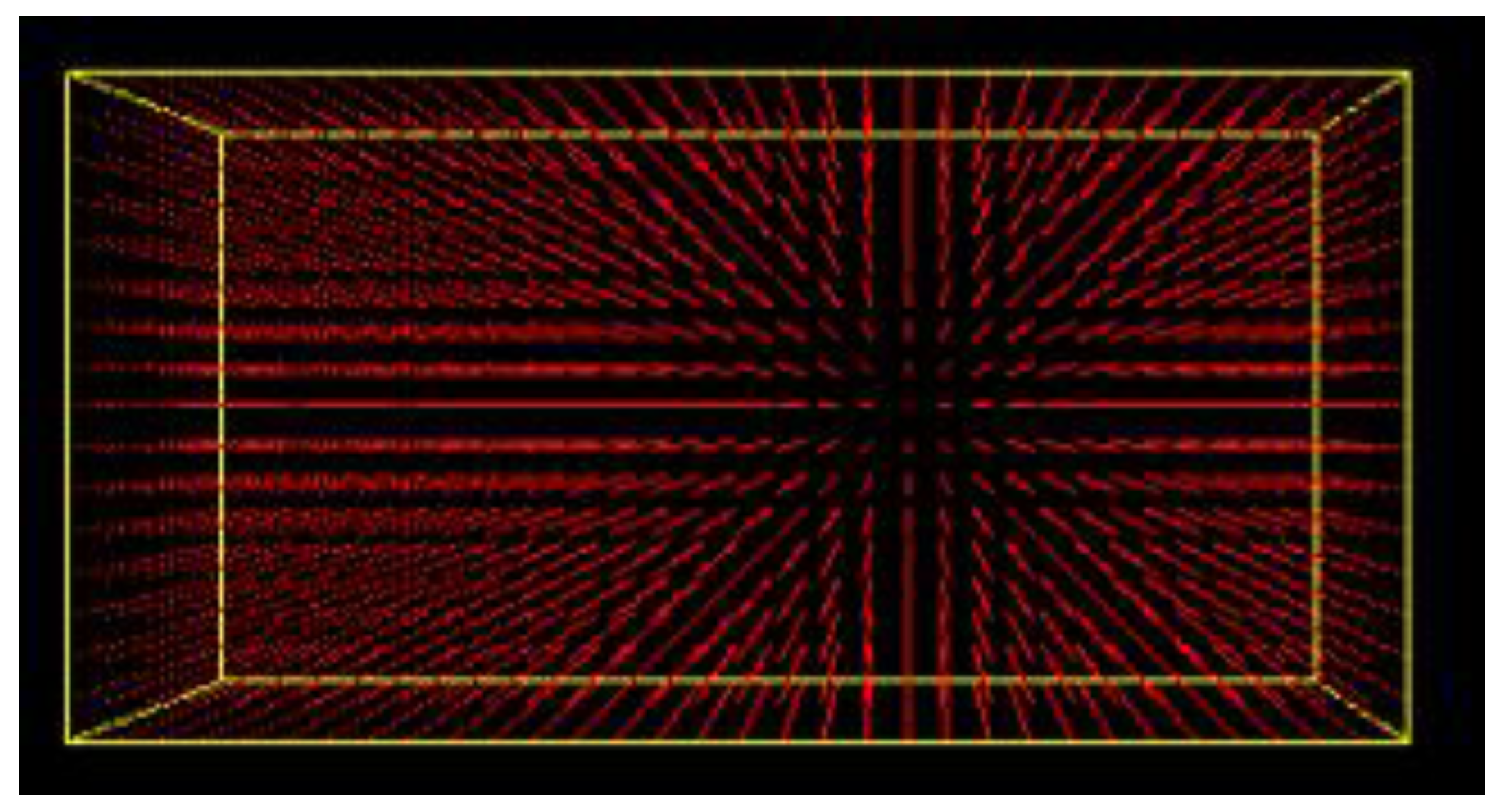
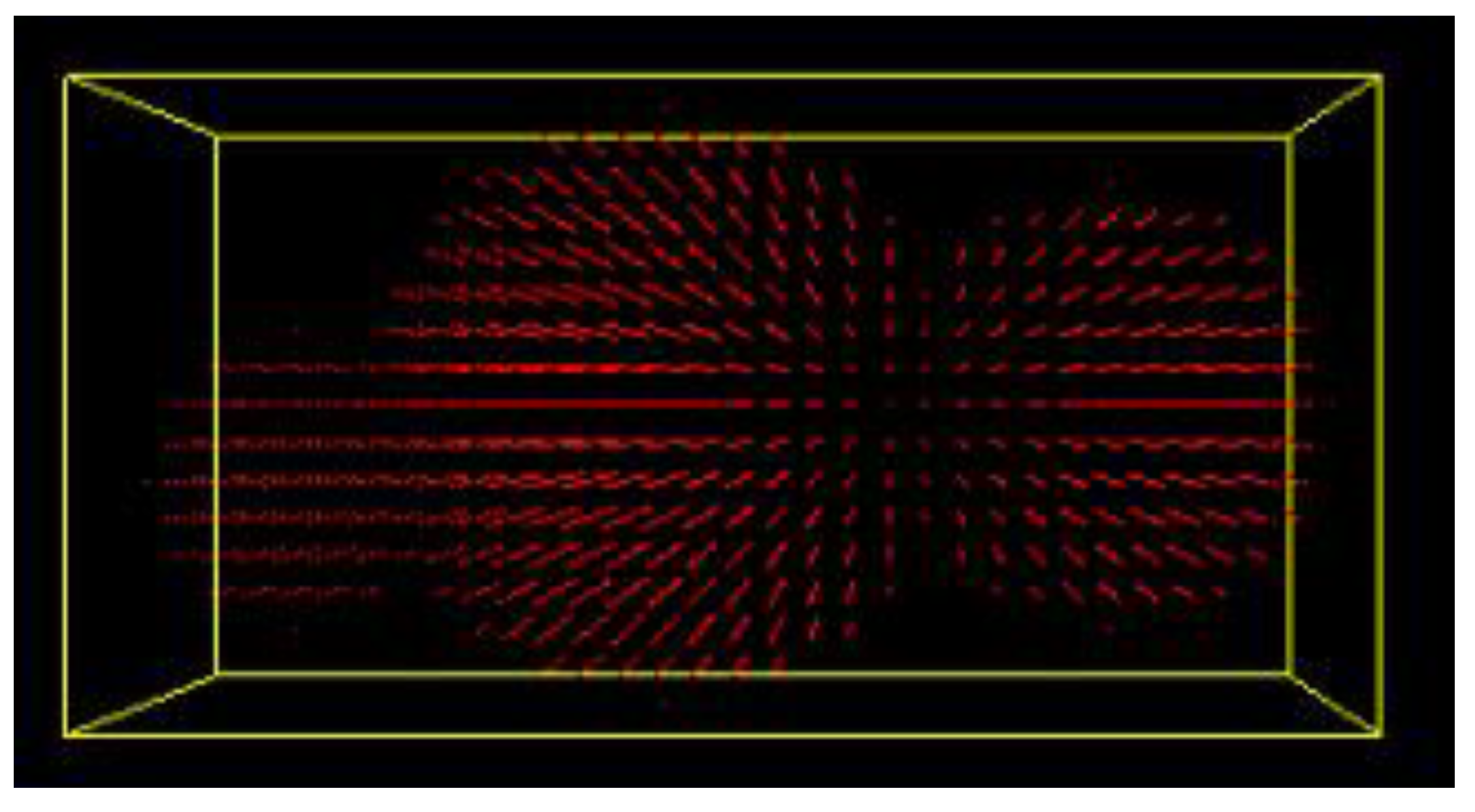
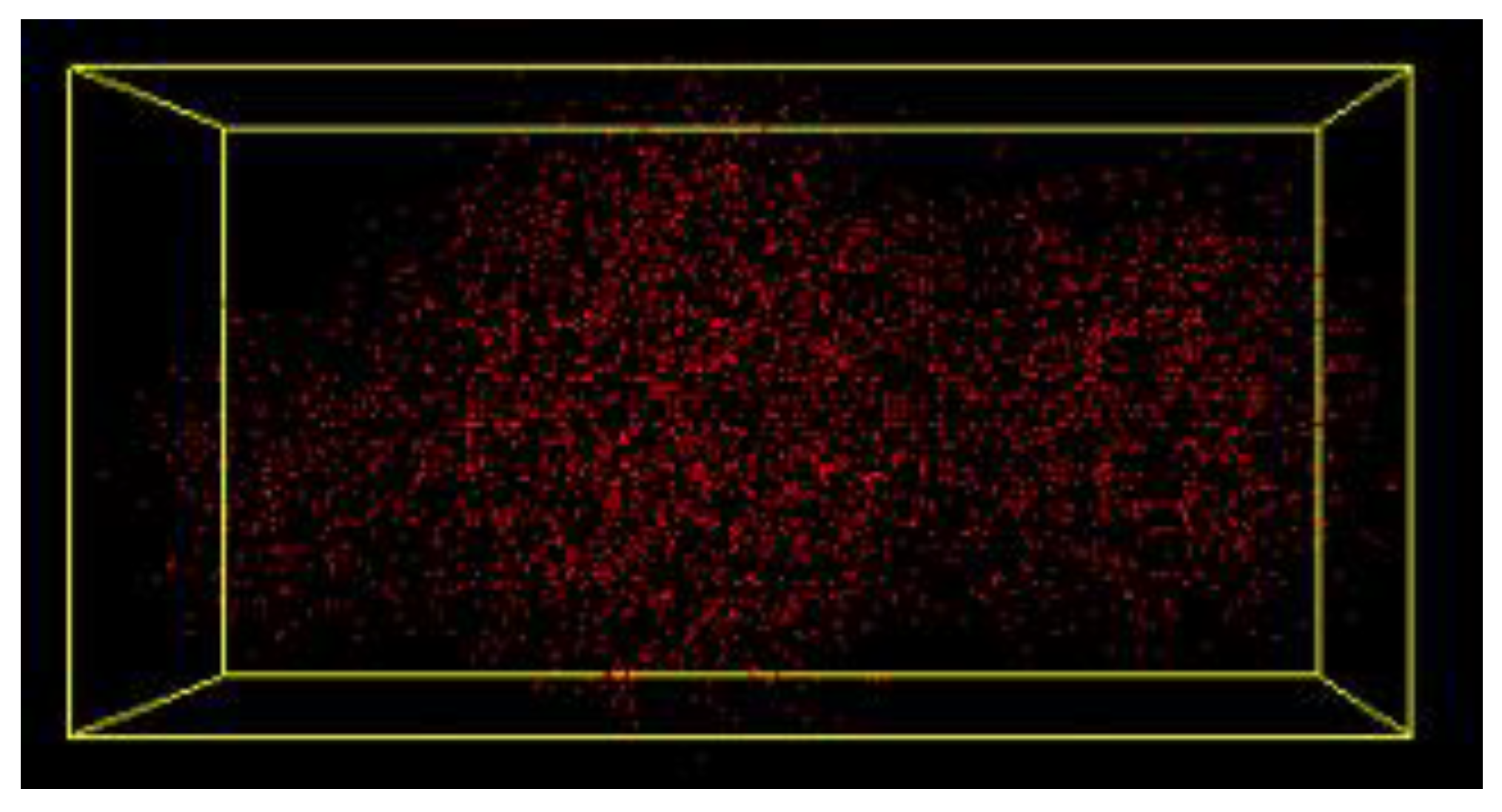
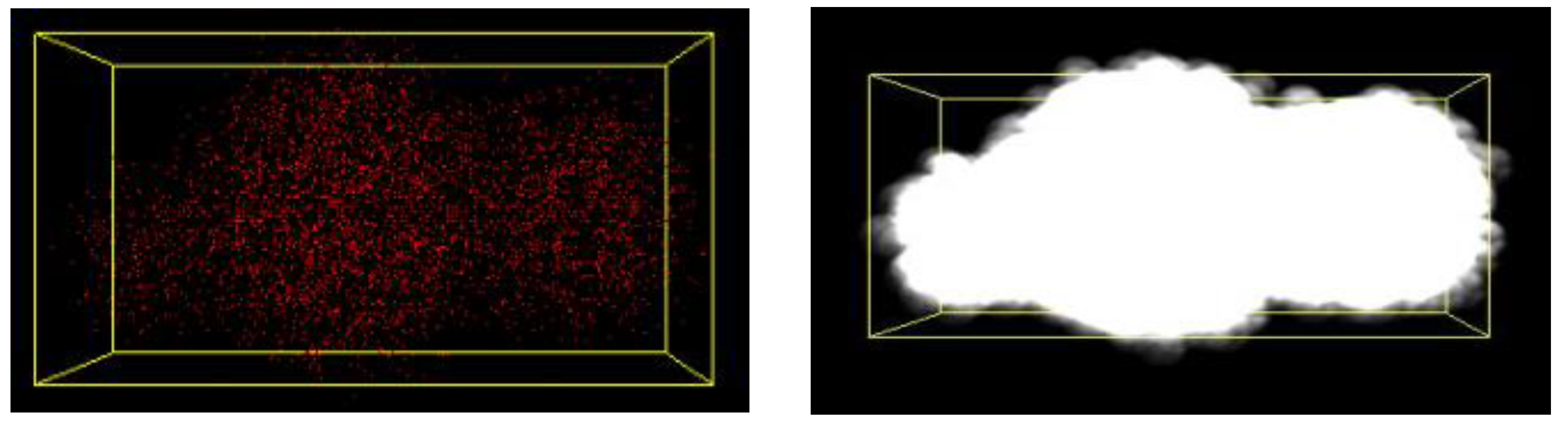
2.4. Generation of Particles in the Bounding Box
3. Simulating Cloud Particles Using the Cellular Automaton
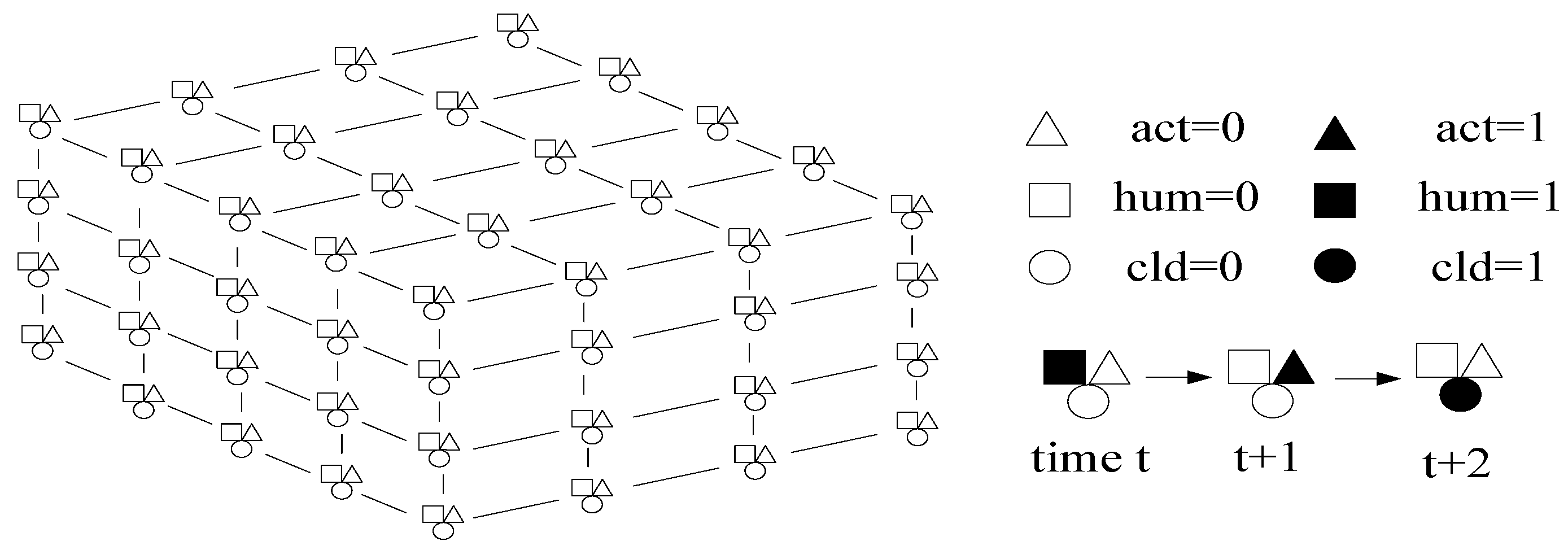
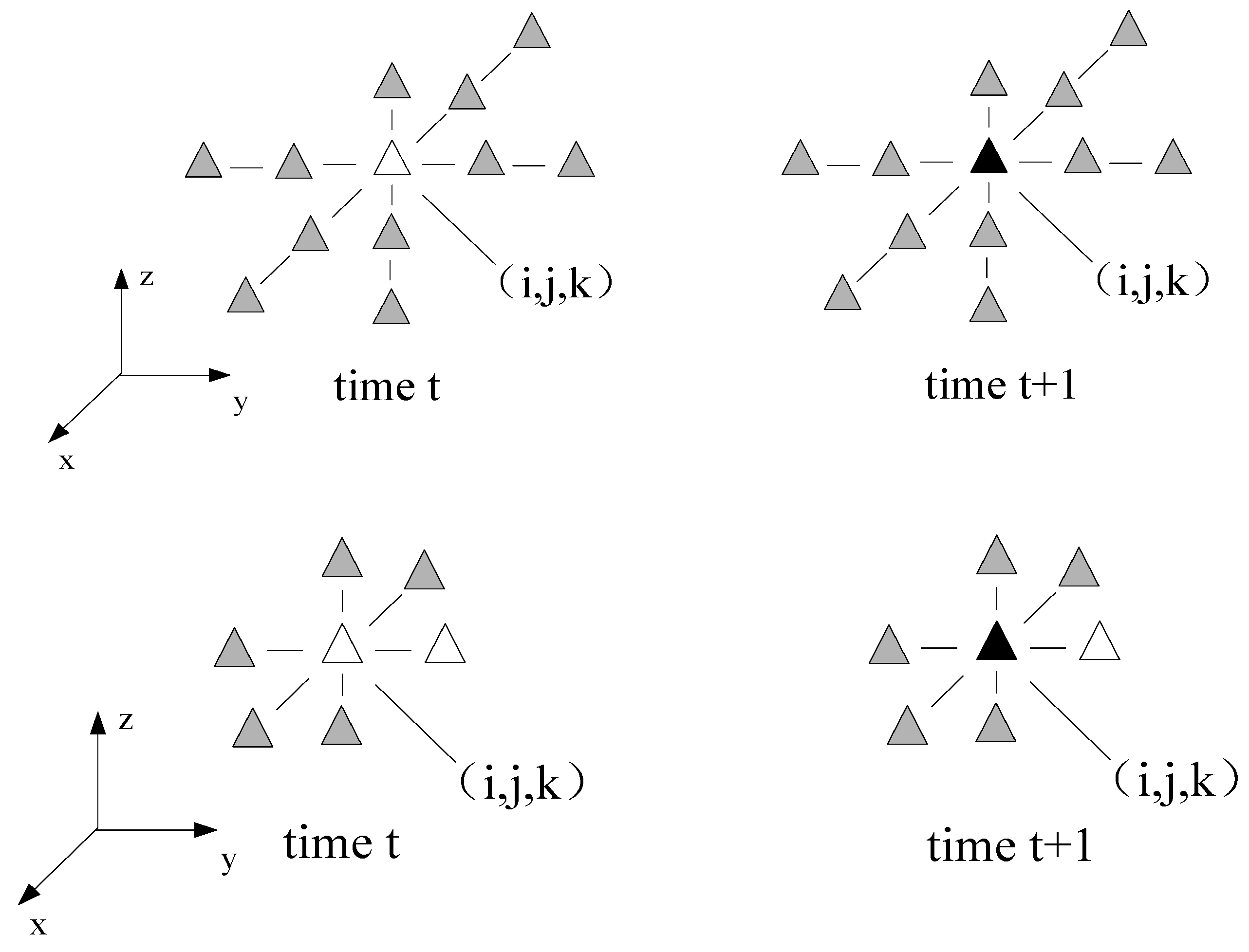
3.1. Overview of the Cellular Automaton
3.2. Using Cells to Replace the Uniform Particles
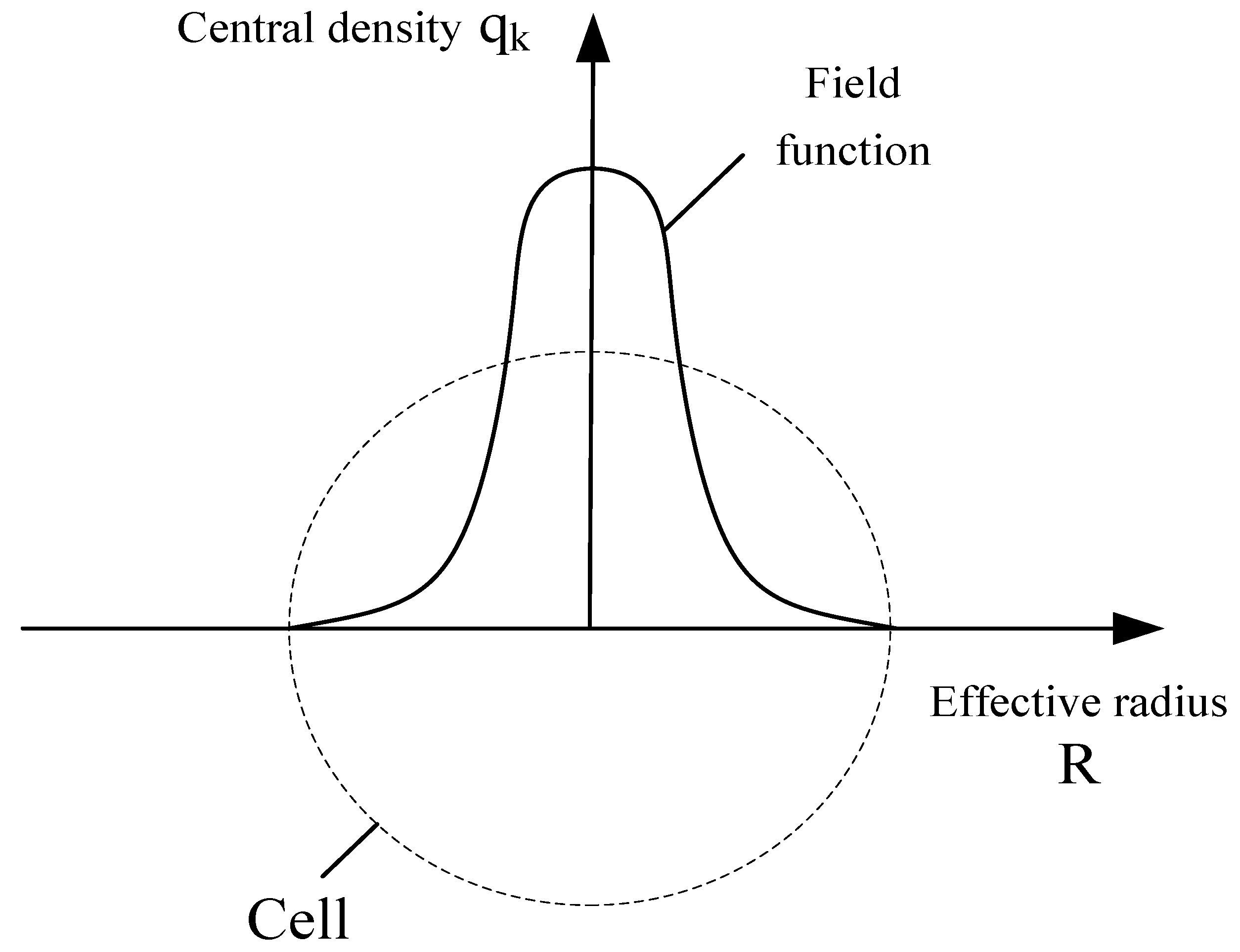
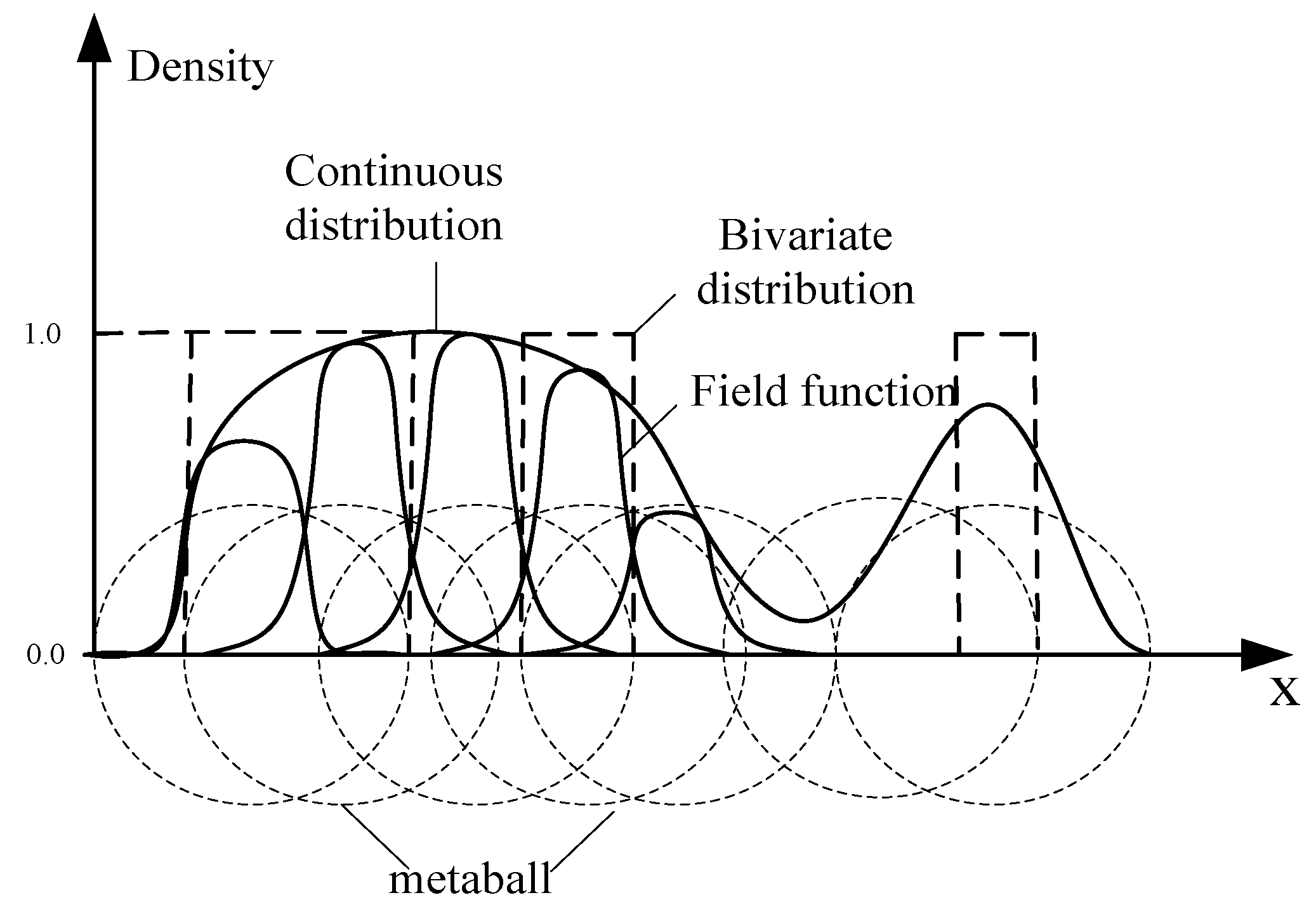
3.3. Calculating Continuous Density
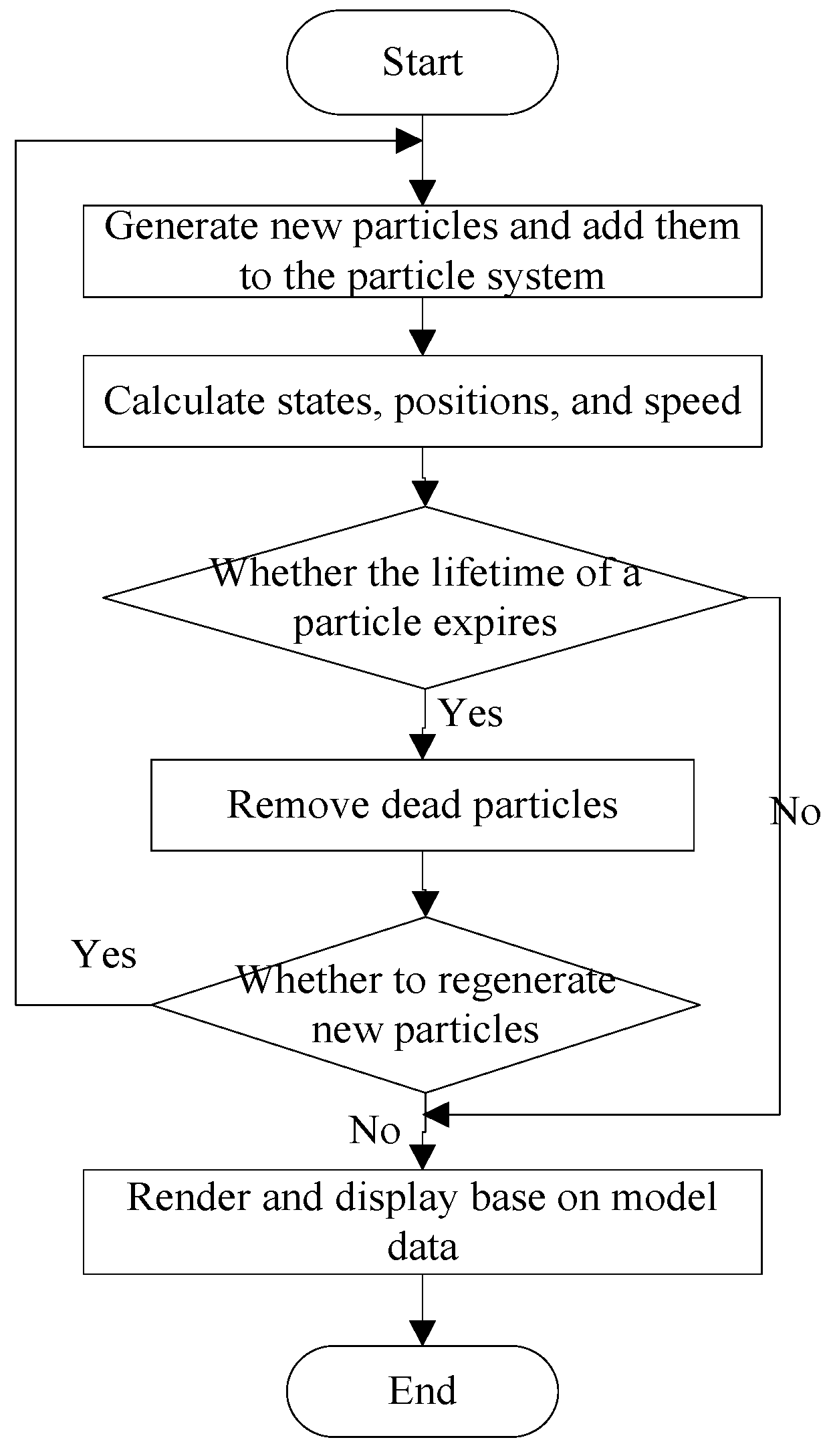
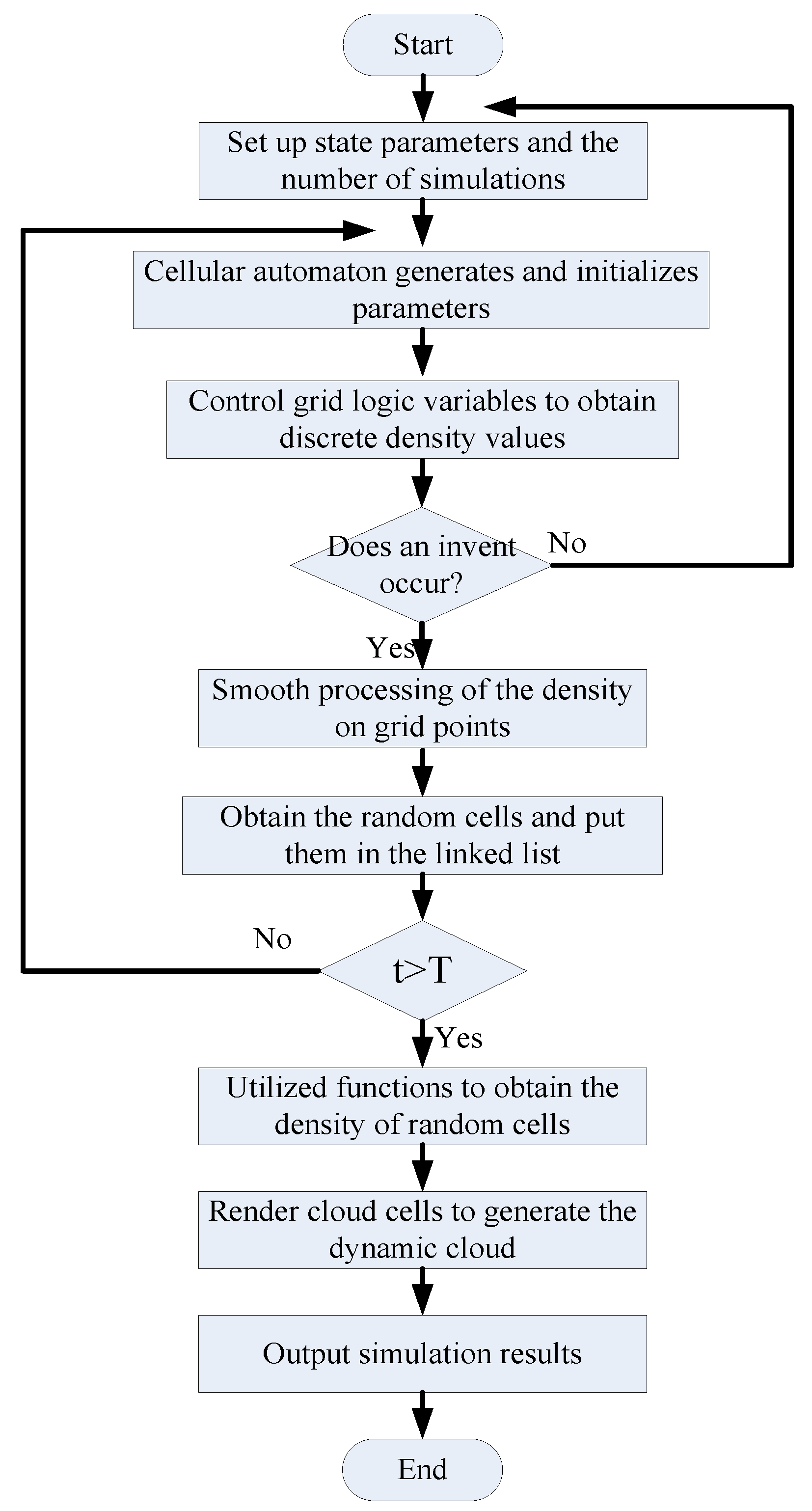
3.4. Flowchart of the Cellular Automaton Simulation
4. Texture Rendering
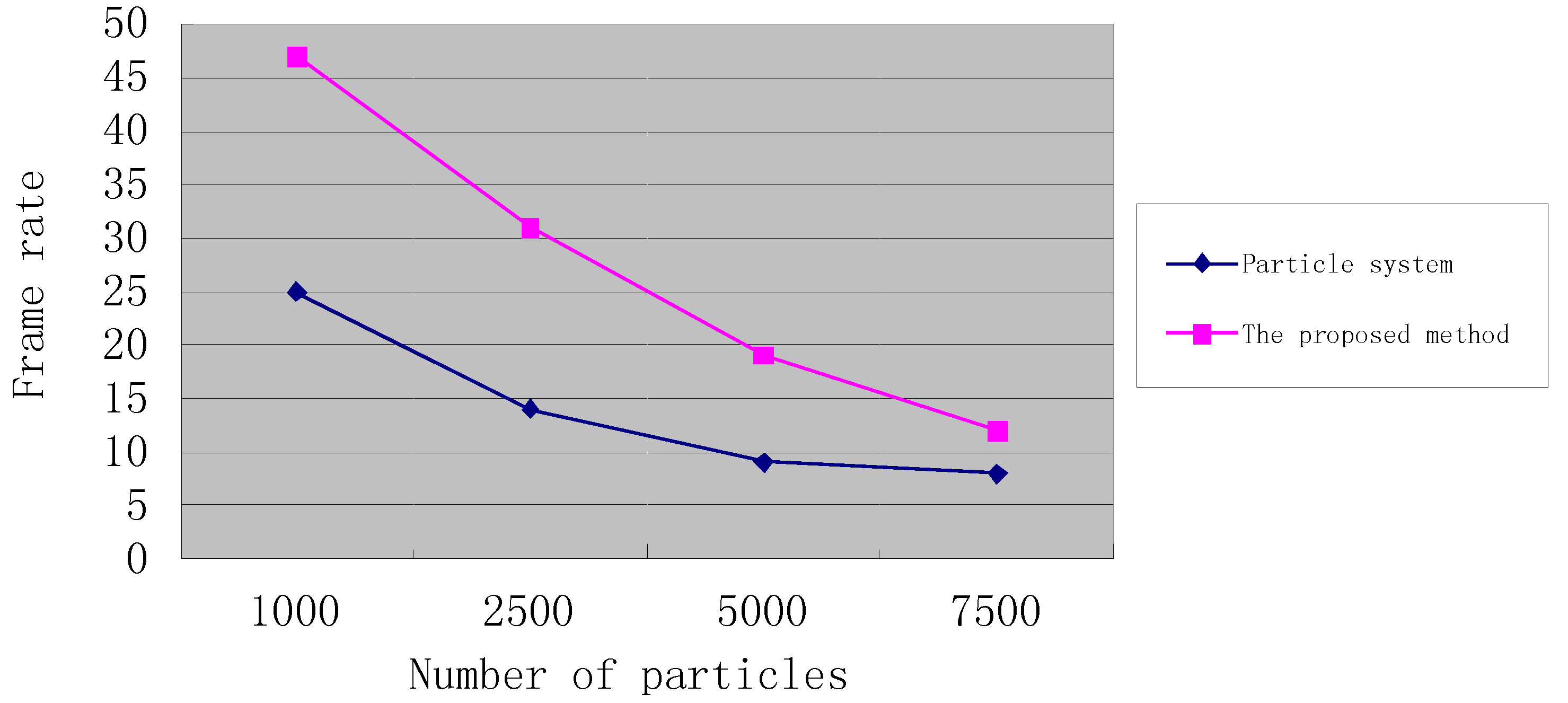
5. Results and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, B.; Peng, J.L.; Kwak, Y.; Kuo, C. Efficient and realistic cumulus cloud simulation based on similarity approach. In Proceedings of the International Symposium on Visual Computing’07, Nevada, CA, USA, 26–28 November 2007; pp. 781–791.
- Wang, B.; Peng, J.L.; Kuo, C.J. Cumulus cloud synthesis with similarity solution and particle/voxel modeling. In Proceedings of the International Symposium on Visual Computing’08, Las Vegas, NV, USA, 1–3 December 2008; pp. 65–74.
- Dobashi, Y.; Nishita, T.; Yamashita, H. Using metaballs to modeling and animate clouds from satellite images. Vis. Comput. 1999, 15, 471–482. [Google Scholar] [CrossRef]
- Dobashi, Y.; Yamamoto, T.; Nishita, T. A controllable method for animation of earth-scale clouds. In Proceedings of the CASA’06, Geneva, Switzerland, 5–7 July 2006; pp. 43–52.
- Liao, H.S.; Ho, T.; Chuang, J.; Lin, C. Fast rendering of dynamic clouds. Comput. Gr. 2005, 29, 29–40. [Google Scholar] [CrossRef]
- Xu, H.L. Simulation of 3D Cloud Based on Particle System. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2010. [Google Scholar]
- Lopes, A.; Brodlie, K. Improving the robustness and accuracy of the marching cubes algorithm for isosurfacing. Vis. Comput. Gr. 2003, 9, 16–29. [Google Scholar] [CrossRef]
- Nishita, T.; Dobashi, Y.; Nakamae, E. Display of clouds taking into account multiple anisotropic scattering and sky light. In Proceedings of the ACM Siggraph’96, New Orleans, LA, USA, 4–9 August 1996; pp. 379–386.
- Bi, S.B.; Zeng, X.W.; Pan, Q.Y.; Shi, Y. 3D simulation and predigestion algorithms for clouds images based on particle system. J. Syst. Simul. 2014, 11, 2630–2636. (In Chinese) [Google Scholar]
- Hu, X.Y.; Sun, B.; Ling, X.H. An improved cloud rendering method. In Proceeding of the International Conference on Image and Graphics, Xi’an, China, 1 June 2009; pp. 853–858.
- You, Y.J.; Kang, F.J.; Tang, K. Research of sea battlefield distributed virtual environment based on fractal. J. Syst. Simul. 2009, 21, 7190–7194. (In Chinese) [Google Scholar]
- Tuo, Y.F.; Wang, W.; Qiu, K.; Song, F.H.; Yu, F.F.; Wang, Y.; Wang, Y.S. Application of 3D simulation technology of AWX format infrared satellite cloud image based on OpenGL. J. Meteorol. Environ. 2011, 27, 25–31. (In Chinese) [Google Scholar]
- Harrism, M.J.; Lastra, A. Real-time cloud rendering. Comput. Gr. Forum 2001, 20, 76–84. [Google Scholar] [CrossRef]
- He, H.Q.; Liu, H.H.; Liu, J.X.; Yang, G.Q. Improved simulation method on 3D clouds. J. Syst. Simul. 2008, 20, 2620–2623. [Google Scholar]
- Lu, H.X. Cloud modeling and rendering. Aircr. Des. 2009, 29, 64–68. [Google Scholar]
- Huang, B.; Chen, J.; Wan, W.G. Cloud rendering in flight simulation and its implementation. J. Shanghai Univ. (Nat. Sci.) 2009, 15, 342–345. (In Chinese) [Google Scholar]
- Tang, Z.; Wu, P.B. Real-Time modeling and rendering of 3D Cloud and its application in industrial simulations. J. Comput.-Aided Des. Comput. Gr. 2007, 19, 1051–1055. [Google Scholar]
- Wang, N. Realistic and fast cloud rendering. J. Gr. Tools 2004, 9, 21–40. [Google Scholar] [CrossRef]
- Li, G.; Li, H. All in GPU real-time 3D cloud simulation. J. Syst. Simul. 2009, 21, 7511–7514. [Google Scholar]
- He, X.X.; Chen, L.T.; Zhu, Q.X. Simplified fluid method for fast simulation of large three-dimensional cloud scene. Appl. Res. Comput. 2012, 29, 2357–2359. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Comparison | Particle System | Algorithm | Method in This Paper |
|---|---|---|---|
| Modeling method | Particle system | Cellular automaton system | Particle system + cellular automaton system |
| Whether it can customize the cloud contour | Yes | No | Yes |
| Lighting simulation | Impostor | Single reflection | Impostor |
| Three-dimensional cloud | Yes | Yes | Yes |
| Whether it contains movement | Yes | Yes | Yes |
| Whether it is a real-time algorithm | Yes | Yes | Yes |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, S.; Bi, S.; Zeng, X.; Lu, Y.; Zhou, H. 3-Dimensional Modeling and Simulation of the Cloud Based on Cellular Automata and Particle System. ISPRS Int. J. Geo-Inf. 2016, 5, 86. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060086
Bi S, Bi S, Zeng X, Lu Y, Zhou H. 3-Dimensional Modeling and Simulation of the Cloud Based on Cellular Automata and Particle System. ISPRS International Journal of Geo-Information. 2016; 5(6):86. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060086
Chicago/Turabian StyleBi, Shuoben, Shengjie Bi, Xiaowen Zeng, Yuan Lu, and Hao Zhou. 2016. "3-Dimensional Modeling and Simulation of the Cloud Based on Cellular Automata and Particle System" ISPRS International Journal of Geo-Information 5, no. 6: 86. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060086