Spatial Analysis Using Temporal Point Clouds in Advanced GIS: Methods for Ground Elevation Extraction in Slant Areas and Building Classifications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
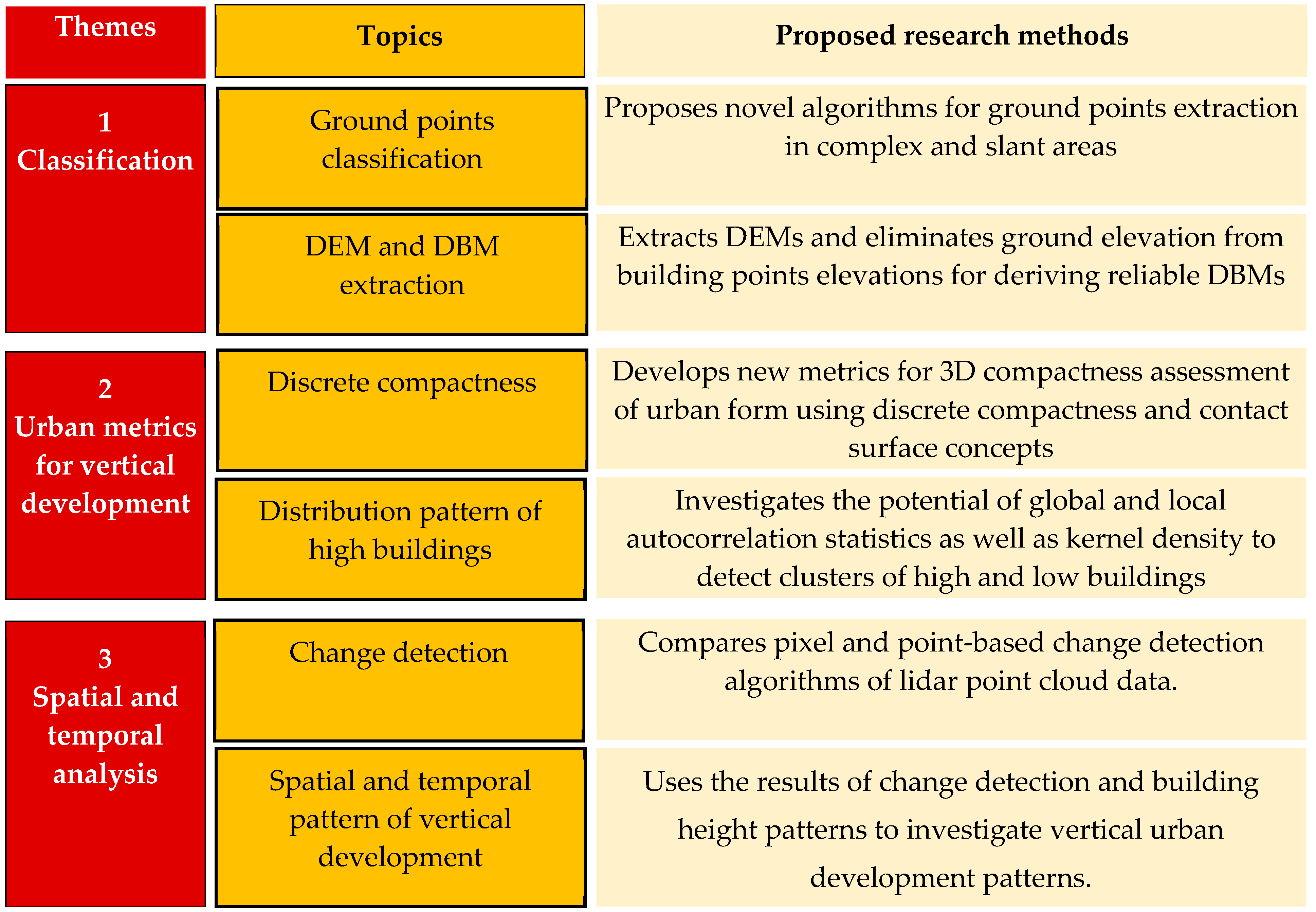
1.1. Concepts and Proposed Objectives for Urban Analytics
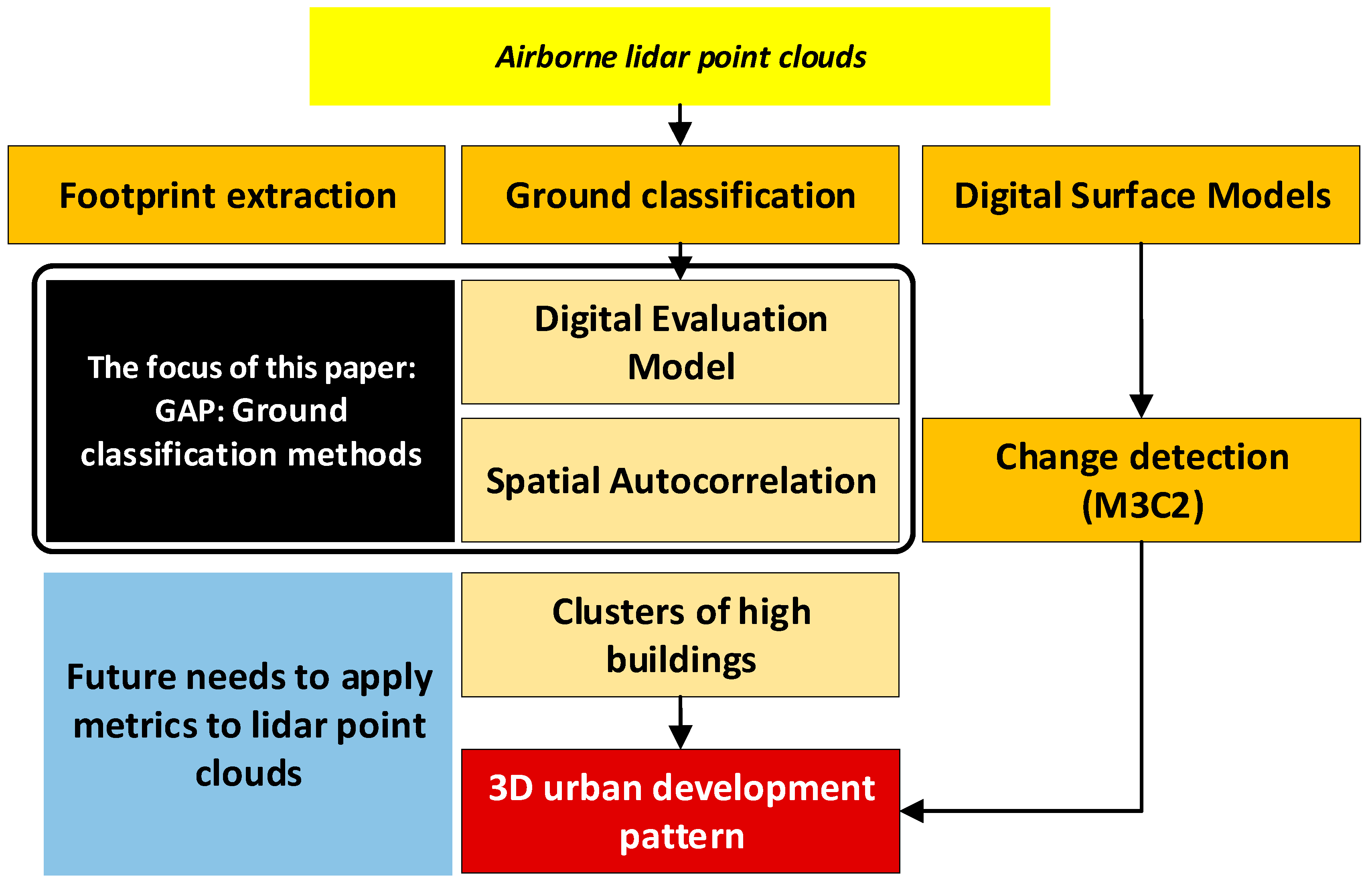
1.2. Gap in Building Heights Metrics Using Temporal Point Cloud in Geographic Information System (GIS)
- Objective 1: To propose the application of 3D Discrete Compactness (3D DC), A*, global and local autocorrelation statistics and kernel density in urban block scale for determining the patterns of vertical urban development for extraction of the concentration of relatively higher and lower buildings; and to propose a clear methodology for applying the metrics on height information extracted from remotely sensed 3D data;
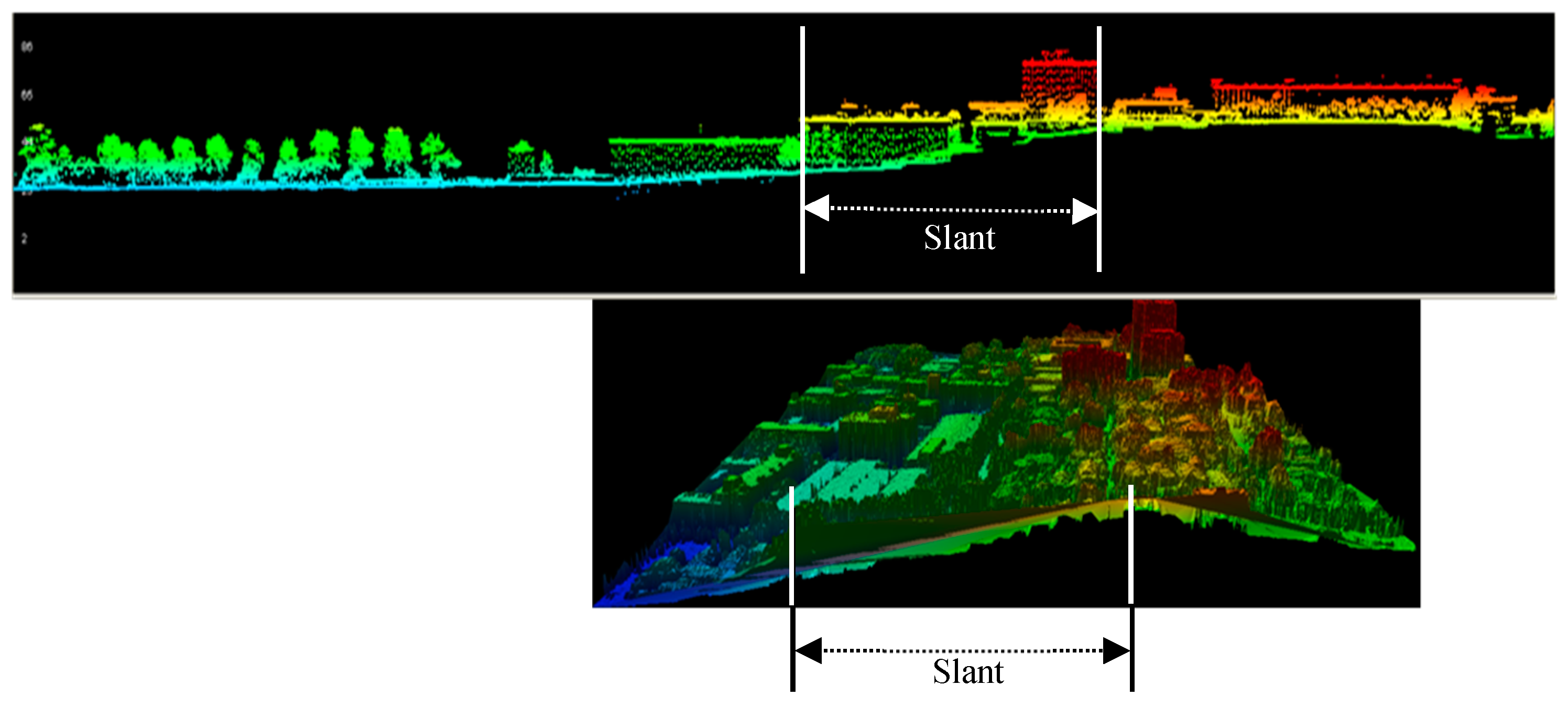
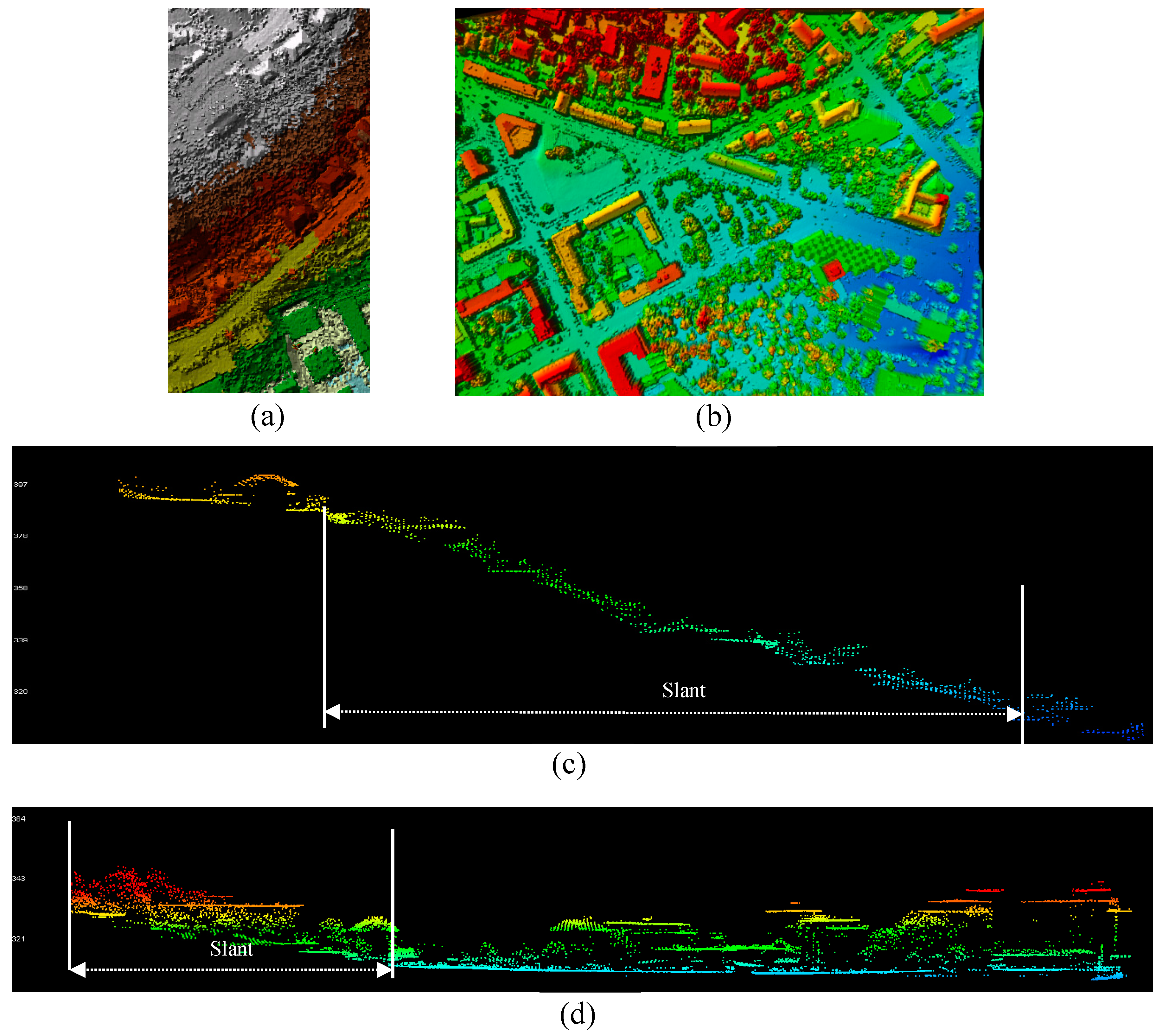
- Objective 2: To propose advanced autocorrelation-based algorithms to classify airborne Lidar point cloud data in complex and slant urban areas comprising large buildings, as ground and non-ground points for producing DEM of the terrain surface and NDSM; and to derive the height information of the classified buildings’ points from the extracted DEM and building points’ elevations;
- Objective 3: To investigate the relationship between distribution patterns of concentrated relatively lower and relatively higher buildings to urban structural elements such as major roads; to determine land use types of high buildings for spatial analysis of relationships between different urban objects such as roads and green spaces; and to demonstrate a method for the analysis of spatial and temporal change of 3D urban form.
2. Research Method
2.1. Study Areas
- (i)
- International Society for Photogrammetry and Remote Sensing (ISPRS) samples numbers 3 and 11 (https://www.itc.nl/isprs/wgIII-3/filtertest/downloadsites/);
- (ii)
- First and last pulse (multiple return) airborne Lidar data over University of New South Wales (UNSW) in Sydney, Australia.
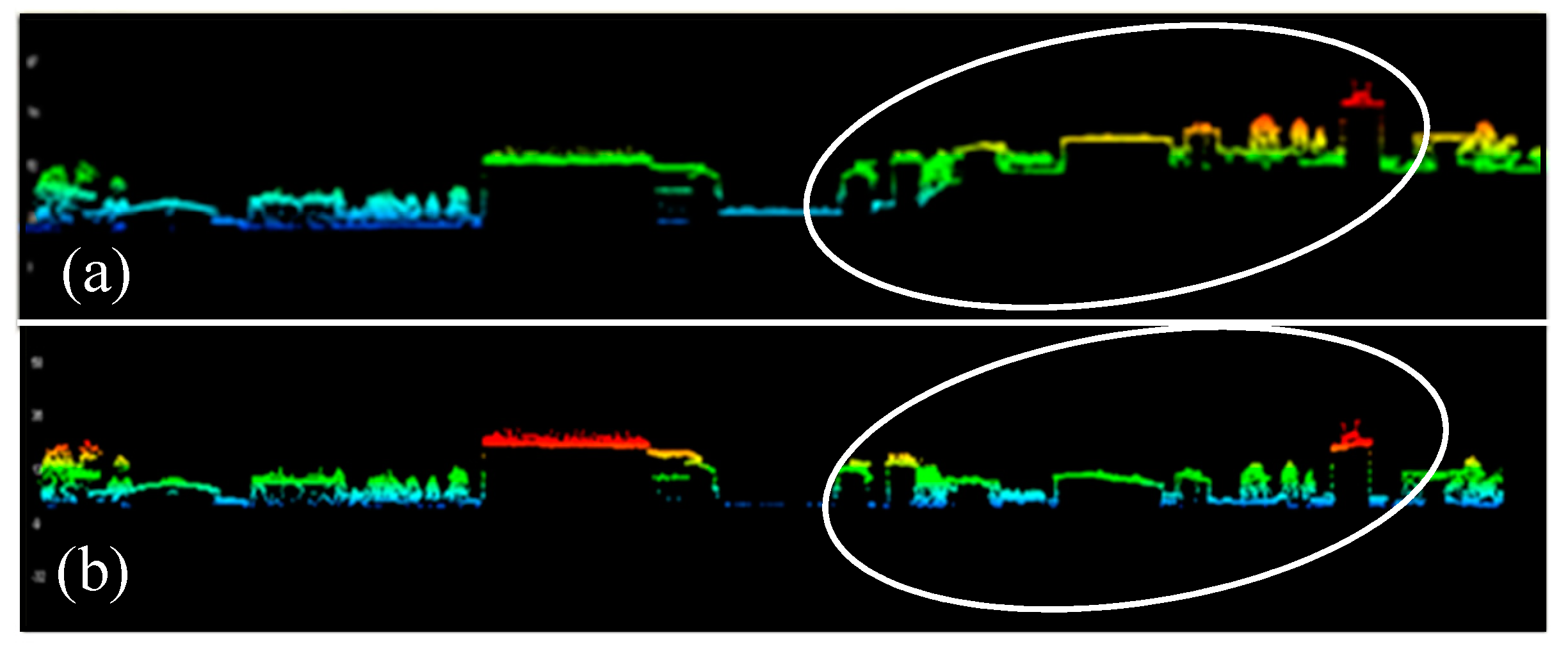
2.2. Digital Elevation Model (DEM) Generation in Slant Areas
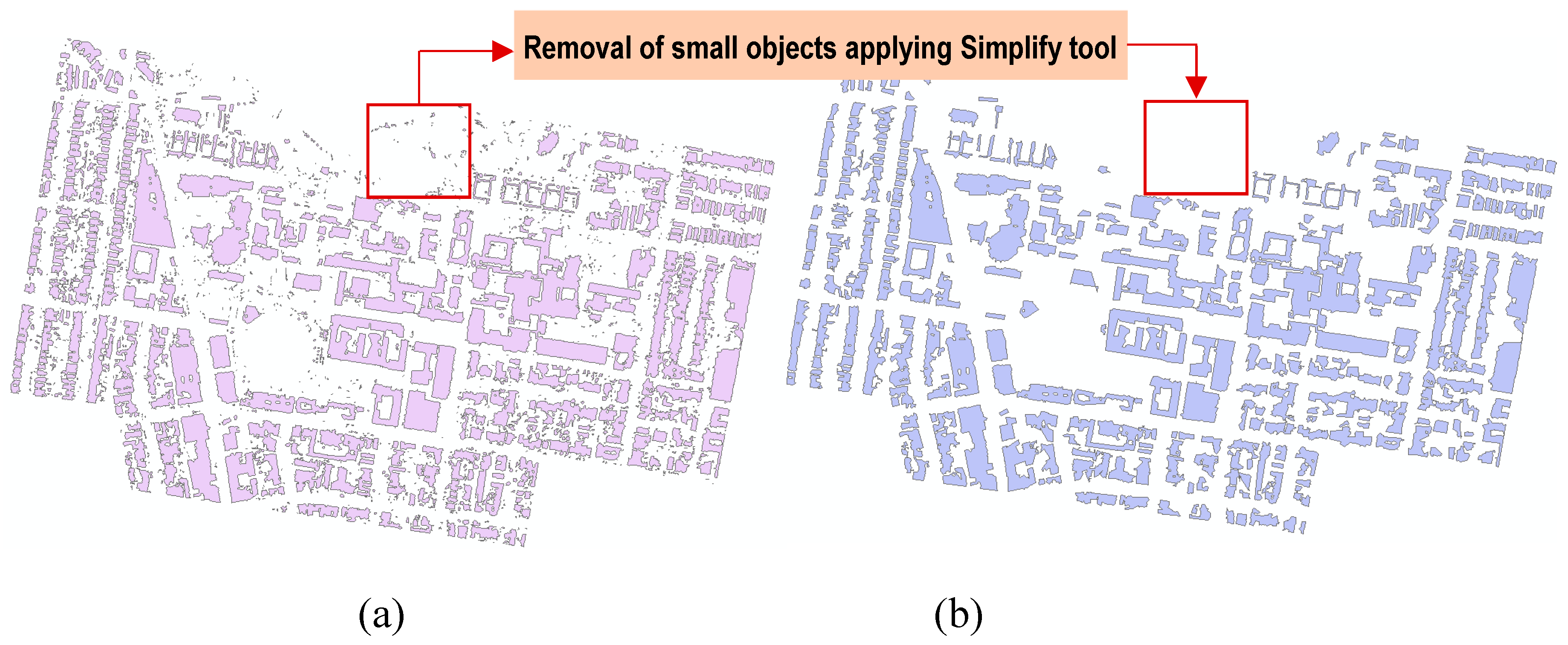
2.3. Building Footprint Extraction
3. Results
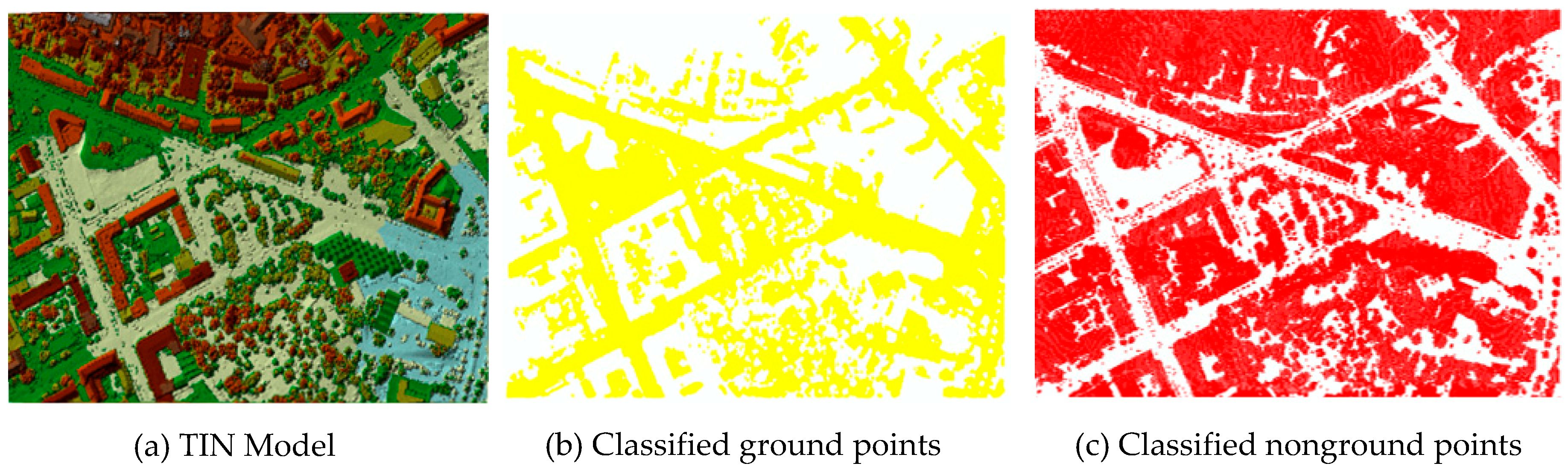
3.1. Window Size and Shape Adaptation in Auto-Correlation Based Classification Algorithms
3.2. Effect of Window Shape, Size and Direction on Extraction of Ground Points in Slant Area
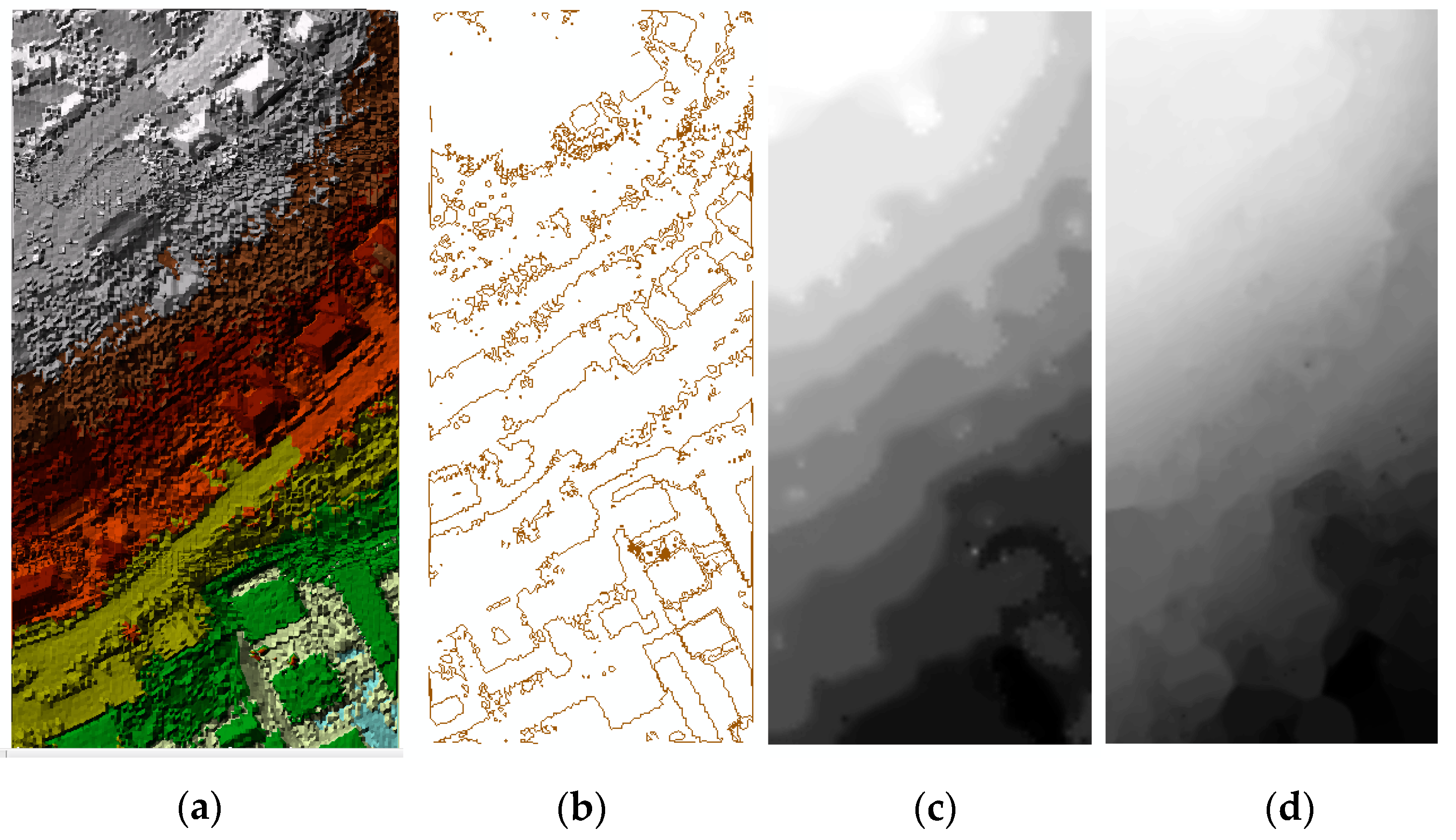
3.3. DEM Extraction Using Contour Lines in Slant Area
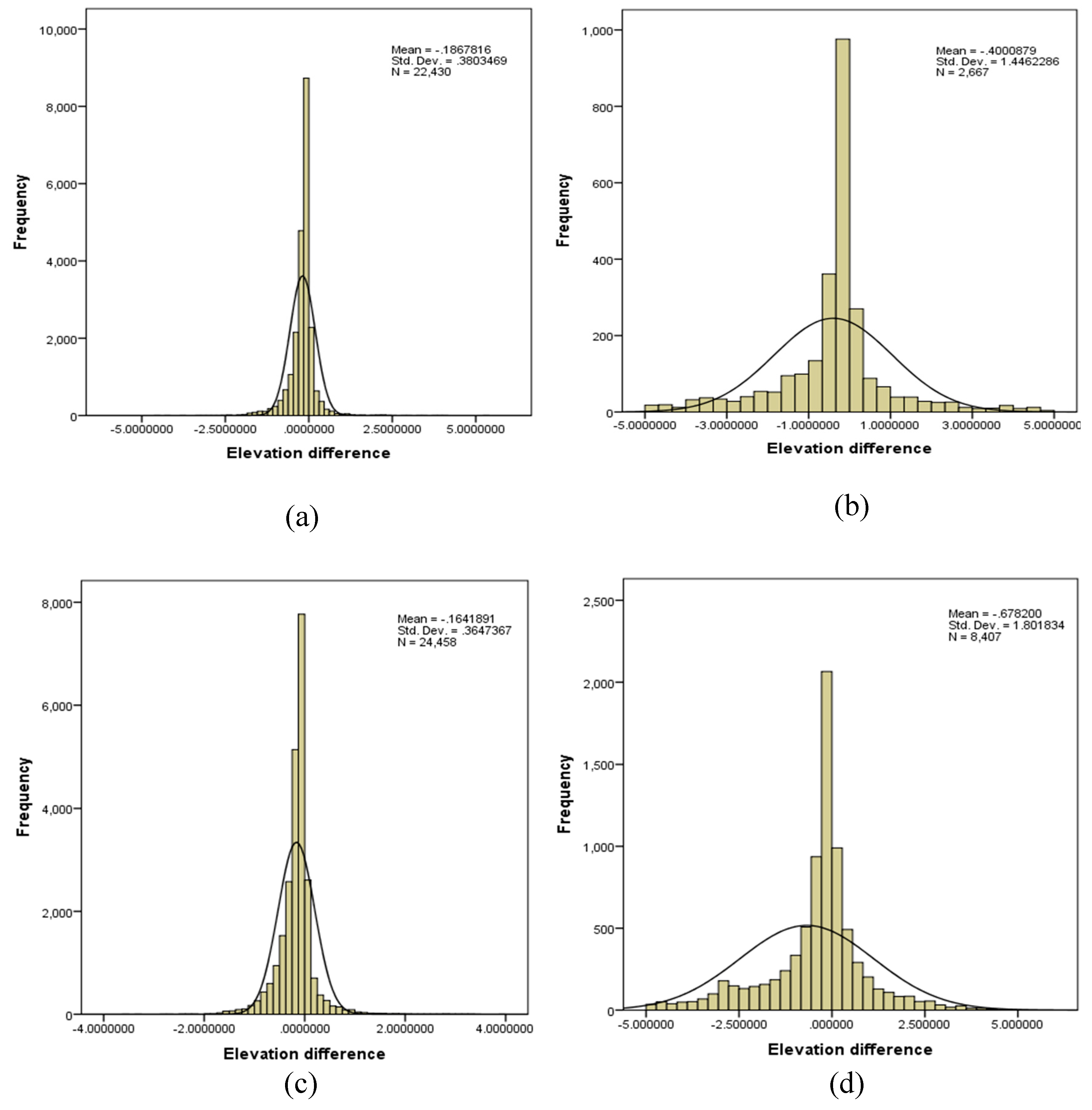
3.4. Validation
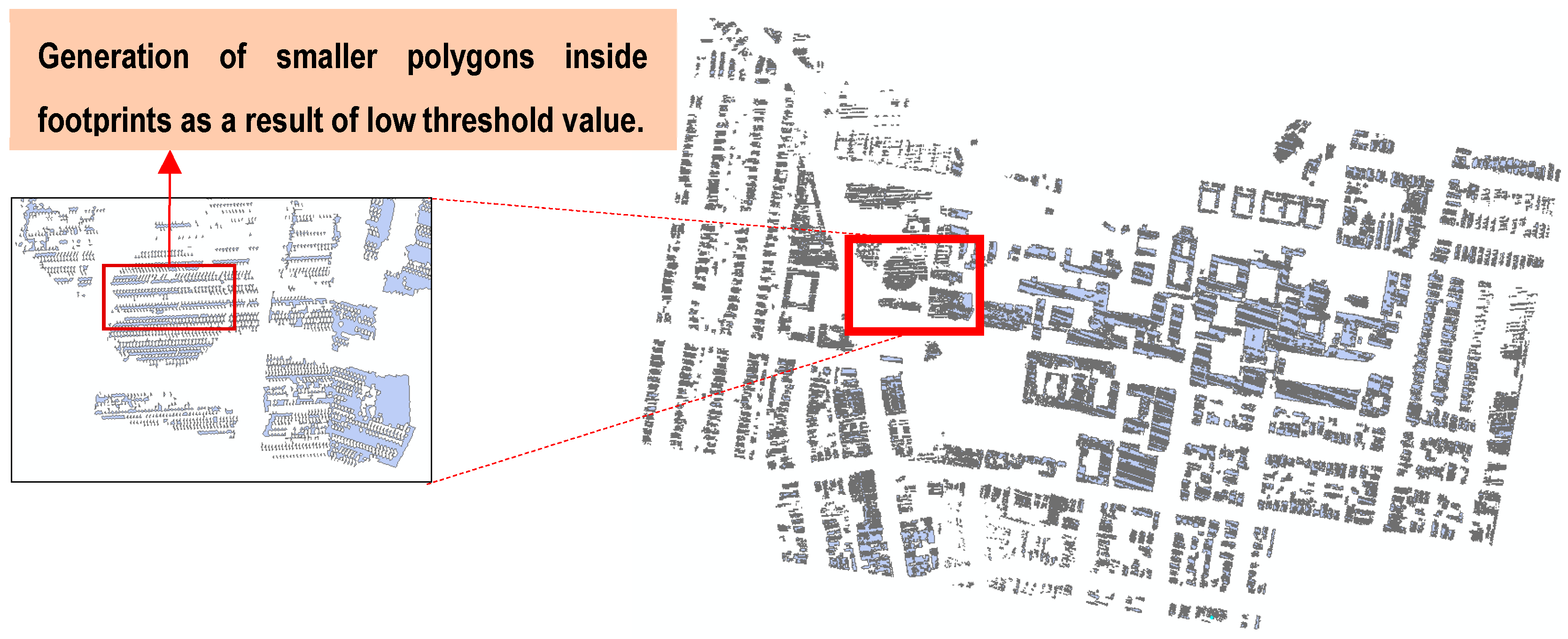
3.5. Buildings Boundaries Extraction
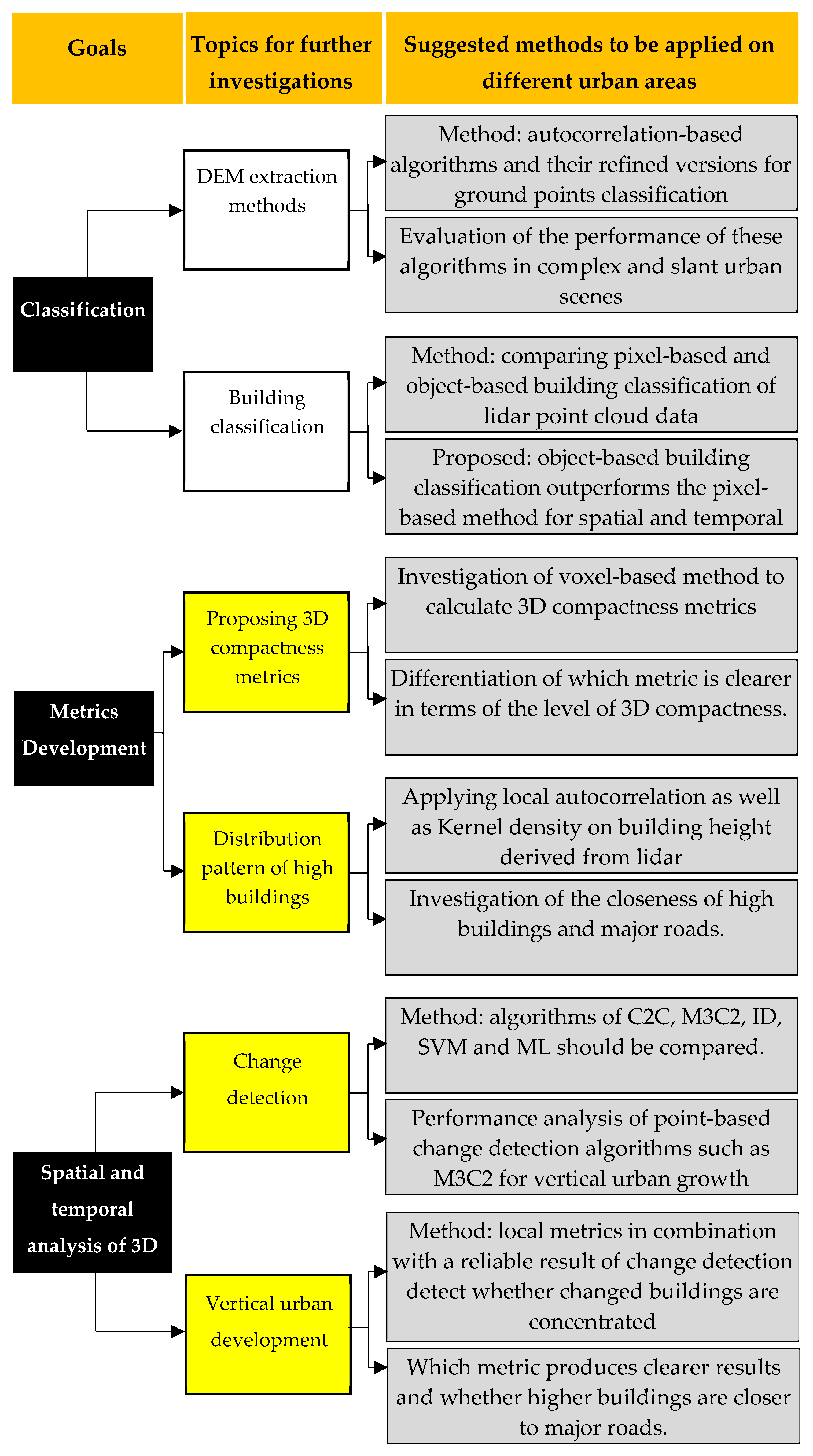
4. Discussion
- Factors, drivers and processes influencing different types of 3D urban patterns;
- Spatial urban theories and model modifications to consider both urban growth and various vertical patterns;
- Adding 3D DC and A* to the current metrics for urban block-scale analysis [61];
- Applying the global and local autocorrelation statistics as metrics appropriate for different cases of urban areas at the city and block scale; and
- Applying the kernel density appropriate for urban block scale on various cases of different countries.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Monteiro, C.S.; Costa, C.; Pina, A.; Santos, M.Y.; Ferrão, P. An urban building database (UBD) supporting a smart city information system. Energy Build. 2018, 158, 244–260. [Google Scholar] [CrossRef]
- Neuville, R.; Pouliot, J.; Poux, F.; de Rudder, L.; Billen, R. A Formalized 3D Geovisualization Illustrated to Selectivity Purpose of Virtual 3D City Model. ISPRS Int. J. Geo-Inf. 2018, 7, 194. [Google Scholar] [CrossRef]
- Elhoseny, H.; Elhoseny, M.; Riad, A.M.; Hassanien, A.E. A framework for big data analysis in smart cities. In Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications, Cairo, Egypt, 22–24 February 2018; Springer: Cham, Switzerland, 2018; pp. 405–414. [Google Scholar] [CrossRef]
- Berghauser Pont, M. An Analytical Approach to Urban Form. In Teaching Urban Morphology; Springer: Cham, Switzerland, 26 April 2018; pp. 101–119. [Google Scholar] [CrossRef]
- Sani, M.J.; Rahman, A.A. GIS and BIM integration at data level: A review. Int. Soc. Photogramm. Remote Sens. 2018, XLII-4/W9, 299–306. [Google Scholar] [CrossRef]
- Jelokhani-Niaraki, M.; Sadeghi-Niaraki, A.; Choi, S.-M. Semantic interoperability of GIS and MCDA tools for environmental assessment and decision making. Environ. Model. Softw. 2018, 100, 104–122. [Google Scholar] [CrossRef]
- Hare, T.M.; Rossi, A.P.; Frigeri, A.; Marmo, C. Interoperability in planetary research for geospatial data analysis. Planet. Space Sci. 2018, 150, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Cheng, S.; Lv, Z.; Song, H.; Jia, T.; Lu, N. Data analytics of urban fabric metrics for smart cities. Future Gener. Comput. Syst. 2018, in press. [Google Scholar] [CrossRef]
- Jing, Y.; Liu, Y.; Cai, E.; Yi, L.; Zhang, Y. Quantifying the spatiality of urban leisure venues in Wuhan, Central China–GIS-based spatial pattern metrics. Sustain. Cities Soc. 2018, 40, 638–647. [Google Scholar] [CrossRef]
- Rejeb Bouzgarrou, A.; Claramunt, C.; Rejeb, H. Visualizing urban sprawl effects of a Tunisian city: A new urban spatial configuration of Monastir. Ann. GIS 2019, 25, 71–82. [Google Scholar] [CrossRef]
- Corbusier, L.; Etchells, F. Towards a New Architecture. Translated by Frederick Etchells; Dover Publications Inc.: New York, NY, USA, 1946; ISBN 10 0486250237. [Google Scholar]
- Corbusier, L. The City of To-Morrow and Its Planning; Courier Corporation: North Chelmsford, MA, USA, 1987. [Google Scholar]
- Machimura, T. The urban restructuring process in Tokyo in the 1980s: Transforming Tokyo into a world city. Int. J. Urban Reg. Res. 1992, 16, 114–128. [Google Scholar] [CrossRef]
- Beaverstock, J.V.; Smith, R.G.; Taylor, P.J. World-city network: A new metageography? Ann. Assoc. Am. Geogr. 2000, 90, 123–134. [Google Scholar] [CrossRef]
- Pires, M. Watershed protection for a world city: The case of New York. Land Use Policy 2004, 21, 161–175. [Google Scholar] [CrossRef]
- Tsutsumi, J. Vertical Extension Processes and Urban Restructuring in Sydney, Australia. In Urban Transformations: Centres, Peripheries and Systems; Routledge: New York, NY, USA, 2016; p. 121. [Google Scholar]
- Handayani, H.; Murayama, Y.; Ranagalage, M.; Liu, F.; Dissanayake, D. Geospatial analysis of horizontal and vertical urban expansion using multi-spatial resolution data: A case study of Surabaya, Indonesia. Remote Sens. 2018, 10, 1599. [Google Scholar] [CrossRef]
- Lin, J.; Huang, B.; Chen, M.; Huang, Z. Modeling urban vertical growth using cellular automata—Guangzhou as a case study. Appl. Geogr. 2014, 53, 172–186. [Google Scholar] [CrossRef]
- Burton, E.; Jenks, M.; Williams, K. Achieving Sustainable Urban Form; Routledge: New York, NY, USA, 2013. [Google Scholar]
- Jenks, M. Achieving Sustainable Urban Form; Taylor & Francis: London, UK, 2000. [Google Scholar] [CrossRef]
- Burgess, R.; Jenks, M. Compact Cities: Sustainable urban Forms for Developing Countries; Routledge: New York, NY, USA, 2002. [Google Scholar]
- Ganser, R.; Williams, K. Brownfield development: Are we using the right targets? Evidence from England and Germany. Eur. Plan. Stud. 2007, 15, 603–622. [Google Scholar] [CrossRef]
- Office of Deputy Prime Minister. Planning Policy Statement 1: Delivering Sustainable Development; ODPM: London, UK, 2005.
- Adams, D. The Changing Regulatory Environment for Speculative Housebuilding and the Construction of Core Competencies for Brownfleld Development. Environ. Plan. A 2004, 36, 601–624. [Google Scholar] [CrossRef]
- Raco, M.; Henderson, S. Sustainable urban planning and the brownfield development process in the United Kingdom: Lessons from the Thames Gateway. Local Environ. 2006, 11, 499–513. [Google Scholar] [CrossRef]
- Gill, M.; Bhide, A. Densification through vertical resettlement as a tool for sustainable urban development. In Proceedings of the Sixth Urban Research and Knowledge Symposium, Barcelona, Spain, 8–10 October 2012. [Google Scholar]
- Seraj, T.; Alam, M.S. Housing Problem and Apartment Development in Dhaka City, Dhaka: Past Present Future; The Asiatic Society of Bangladesh: Dhaka, Bangladesh, 2009. [Google Scholar]
- Wong, K.G. Vertical cities as a solution for land scarcity: The tallest public housing development in Singapore. Urban Des. Int. 2004, 9, 17–30. [Google Scholar] [CrossRef]
- Lau, S.S.Y.; Giridharan, R.; Ganesan, S. Multiple and intensive land use: Case studies in Hong Kong. Habitat Int. 2005, 29, 527–546. [Google Scholar] [CrossRef]
- Wang, M.-S.; Chien, H.-T. Environmental behaviour analysis of high-rise building areas in Taiwan. Build. Environ. 1998, 34, 85–93. [Google Scholar] [CrossRef]
- Chau, K.-W.; Wong, S.K.; Yau, Y.; Yeung, A. Determining optimal building height. Urban Stud. 2007, 44, 591–607. [Google Scholar] [CrossRef]
- Yu, B.; Liu, H.; Wu, J.; Hu, Y.; Zhang, L. Automated derivation of urban building density information using airborne lidar data and object-based method. Landsc. Urban Plan. 2010, 98, 210–219. [Google Scholar] [CrossRef]
- Shi, L.; Shao, G.; Cui, S.; Li, X.; Lin, T.; Yin, K.; Zhao, J. Urban three-dimensional expansion and its driving forces—A case study of Shanghai, China. Chin. Geogr. Sci. 2009, 19, 291–298. [Google Scholar] [CrossRef]
- Lu, Y.; Coops, N.C.; Hermosilla, T. Regional assessment of pan-Pacific urban environments over 25 years using annual gap free Landsat data. Int. J. Appl. Earth Obs. Geoinform. 2016, 50, 198–210. [Google Scholar] [CrossRef]
- Herold, M.; Menz, G. Landscape metric signatures (LMS) to improve urban land use information derived from remotely sensed data. In A Decade of Trans-European Remote Sensing Cooperation; A A Balkema Publishers: Rotterdam, The Netherlands, 2001; pp. 251–256. ISBN 9789058091871. [Google Scholar]
- Herold, M.; Goldstein, N.C.; Clarke, K.C. The spatiotemporal form of urban growth: Measurement, analysis and modeling. Remote Sens. Environ. 2003, 86, 286–302. [Google Scholar] [CrossRef]
- Dietzel, C.; Herold, M.; Hemphill, J.J.; Clarke, K.C. Spatio-temporal dynamics in California’s Central Valley: Empirical links to urban theory. Int. J. Geogr. Inf. Sci. 2005, 19, 175–195. [Google Scholar] [CrossRef]
- Murayama, Y.; Thapa, R.B. Spatial analysis: Evolution, methods, and applications. In Spatial Analysis and Modeling in Geographical Transformation Process; Springer: Dordrecht, The Netherlands, 2011; pp. 1–26. ISBN 978-94-007-0671-2. [Google Scholar] [CrossRef]
- Zhao, Y.; Murayama, Y. Urban dynamics analysis using spatial metrics geosimulation. In Spatial Analysis and Modeling in Geographical Transformation Process; Springer: Dordrecht, The Netherlands, 2011; pp. 153–167. ISBN 978-94-007-0670-5. [Google Scholar] [CrossRef]
- Plowright, A.; Tortini, R.; Coops, N.C. Determining Optimal Video Length for the Estimation of Building Height through Radial Displacement Measurement from Space. ISPRS Int. J. Geo-Inf. 2018, 7, 380. [Google Scholar] [CrossRef]
- Jat, M.K.; Garg, P.K.; Khare, D. Monitoring and modelling of urban sprawl using remote sensing and GIS techniques. Int. J. Appl. Earth Obs. Geoinform. 2008, 10, 26–43. [Google Scholar] [CrossRef]
- Bhatta, B.; Saraswati, S.; Bandyopadhyay, D. Quantifying the degree-of-freedom, degree-of-sprawl, and degree-of-goodness of urban growth from remote sensing data. Appl. Geogr. 2010, 30, 96–111. [Google Scholar] [CrossRef]
- Bhatta, B.; Saraswati, S.; Bandyopadhyay, D. Urban sprawl measurement from remote sensing data. Appl. Geogr. 2010, 30, 731–740. [Google Scholar] [CrossRef]
- Jaeger, J.A.; Schwick, C. Improving the measurement of urban sprawl: Weighted Urban Proliferation (WUP) and its application to Switzerland. Ecol. Indic. 2014, 38, 294–308. [Google Scholar] [CrossRef]
- Stathakis, D.; Faraslis, I. Monitoring urban sprawl using simulated PROBA-V data. Int. J. Remote Sens. 2014, 35, 2731–2743. [Google Scholar] [CrossRef]
- Huang, Y.; Zhuo, L.; Tao, H.; Shi, Q.; Liu, K. A Novel Building Type Classification Scheme Based on Integrated LiDAR and High-Resolution Images. Remote Sens. 2017, 9, 679. [Google Scholar] [CrossRef]
- Shirowzhan, S.; Trinder, J. Building classification from lidar data for spatio-temporal assessment of 3D urban developments. Procedia Eng. 2017, 180, 1453–1461. [Google Scholar] [CrossRef]
- Kakon, A.N.; Mishima, N.; Kojima, S. Simulation of the urban thermal comfort in a high density tropical city: Analysis of the proposed urban construction rules for Dhaka, Bangladesh. In Building Simulation; Tsinghua University Press: Beijing, China; Springer: Berlin/Heidelberg, Germany, 2009; Volume 2, p. 291. ISSN 1996-3599. [Google Scholar] [CrossRef]
- Stewart, I.D.; Oke, T.R. Local climate zones for urban temperature studies. Bull. Am. Meteorol. Soc. 2012, 93, 1879–1900. [Google Scholar] [CrossRef]
- Irger, M. The Effect of Urban Form on Urban Microclimate. Ph.D. Thesis, Faculty of Built Environment, The University of New South Wales, Sydney, Australia, 2014. [Google Scholar]
- Giridharan, R.; Ganesan, S.; Lau, S. Daytime urban heat island effect in high-rise and high-density residential developments in Hong Kong. Energy Build. 2004, 36, 525–534. [Google Scholar] [CrossRef]
- Giridharan, R.; Lau, S.; Ganesan, S.; Givoni, B. Urban design factors influencing heat island intensity in high-rise high-density environments of Hong Kong. Build. Environ. 2007, 42, 3669–3684. [Google Scholar] [CrossRef]
- Giridharan, R.; Lau, S.; Ganesan, S.; Givoni, B. Lowering the outdoor temperature in high-rise high-density residential developments of coastal Hong Kong: The vegetation influence. Build. Environ. 2008, 43, 1583–1595. [Google Scholar] [CrossRef]
- Kolokotroni, M.; Giridharan, R. Urban heat island intensity in London: An investigation of the impact of physical characteristics on changes in outdoor air temperature during summer. Sol. Energy 2008, 82, 986–998. [Google Scholar] [CrossRef] [Green Version]
- Ayata, T. Investigation of building height and roof effect on the air velocity and pressure distribution around the detached houses in Turkey. Appl. Therm. Eng. 2009, 29, 1752–1758. [Google Scholar] [CrossRef]
- Kotthaus, S.; Grimmond, C.S.B. Energy exchange in a dense urban environment–Part I: Temporal variability of long-term observations in central London. Urban Clim. 2014, 10, 261–280. [Google Scholar] [CrossRef]
- Murray, A.T.; McGuffog, I.; Western, J.S.; Mullins, P. Exploratory spatial data analysis techniques for examining urban crime: Implications for evaluating treatment. Br. J. Criminol. 2001, 41, 309–329. [Google Scholar] [CrossRef]
- Hirota, Y.; Izumikawa, H.; Ono, C. Outdoor-to-indoor radio propagation characteristics with 800 MHz band in an urban environment. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014; pp. 697–698. [Google Scholar] [CrossRef]
- Peifeng, Z.; Yuanman, H.; Hongshi, H. The spatial pattern of building height in Tiexi District. In Proceedings of the 2011 International Conference on Electric Technology and Civil Engineering (ICETCE), Lushan, China, 22–24 April 2011; pp. 1774–1777. [Google Scholar]
- Gooding, J.; Crook, R.; Tomlin, A.S. Modelling of roof geometries from low-resolution LiDAR data for city-scale solar energy applications using a neighbouring buildings method. Appl. Energy 2015, 148, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Shirowzhan, S.; Sepasgozar, S.M.E.; Li, H.; Trinder, J. Spatial compactness metrics and Constrained Voxel Automata development for analyzing 3D densification and applying to point clouds: A synthetic review. Autom. Constr. 2018, 96, 236–249. [Google Scholar] [CrossRef]
- Galster, G.; Hanson, R.; Ratcliffe, M.R.; Wolman, H.; Coleman, S.; Freihage, J. Wrestling sprawl to the ground: Defining and measuring an elusive concept. Hous. Policy Debate 2001, 12, 681–717. [Google Scholar] [CrossRef]
- Massey, D.S.; Denton, N.A. The dimensions of residential segregation. Soc. Forces 1988, 67, 281–315. [Google Scholar] [CrossRef]
- Huang, J.; Lu, X.X.; Sellers, J.M. A global comparative analysis of urban form: Applying spatial metrics and remote sensing. Landsc. Urban Plan. 2007, 82, 184–197. [Google Scholar] [CrossRef]
- Arribas-Bel, D.; Nijkamp, P.; Scholten, H. Multidimensional urban sprawl in Europe: A self-organizing map approach. Comput. Environ. Urban Syst. 2011, 35, 263–275. [Google Scholar] [CrossRef] [Green Version]
- Kumar, J.A.V.; Pathan, S.; Bhanderi, R. Spatio-temporal analysis for monitoring urban growth–a case study of Indore city. J. Indian Soc. Remote Sens. 2007, 35, 11–20. [Google Scholar] [CrossRef]
- Massam, B.H.; Goodchild, M.F. Temporal trends in the spatial organization of a service agency. Can. Geogr./Le Géographe Canadien 1971, 15, 193–206. [Google Scholar] [CrossRef]
- Angel, S.; Parent, J.; Civco, D. Urban sprawl metrics: An analysis of global urban expansion using GIS. In Proceedings of the ASPRS 2007 Annual Conference, Tampa, FL, USA, 7–11 May 2007. [Google Scholar]
- Shirowzhan, S.; Lim, S.; Trinder, J. Enhanced autocorrelation-based algorithms for filtering airborne lidar data over urban areas. J. Surv. Eng. 2016, 142, 04015008. [Google Scholar] [CrossRef]
- Sreevalsan-Nair, J. Visual Analytics of Three-Dimensional Airborne LiDAR Point Clouds in Urban Regions. In Geospatial Infrastructure, Applications and Technologies: India Case Studies; Springer Nature Singapore Pte Ltd.: Singapore, 2018; pp. 313–325. [Google Scholar]
- Rosser, J.F.; Boyd, D.S.; Long, G.; Zakhary, S.; Mao, Y.; Robinson, D. Predicting residential building age from map data. Comput. Environ. Urban Syst. 2019, 73, 56–67. [Google Scholar] [CrossRef]
- Sepasgozar, S.M.E.; Forsythe, P.; Shirowzhan, S. Evaluation of terrestrial and mobile scanner technologies for part-built information modeling. J. Constr. Eng. Manag. 2018, 144, 04018110. [Google Scholar] [CrossRef]
- Sepasgozar, S.; Shirowzhan, S.; Wang, C.C. A Scanner Technology Acceptance Model for Construction Projects. Procedia Eng. 2017, 1237–1246. [Google Scholar] [CrossRef]
- Sepasgozar, S.M.; Forsythe, P.; Shirowzhan, S.; Norzahari, F. Scanners And Photography: A Combined Framework. In Proceedings of the 40th Australasian Universities Building Education Association (AUBEA) 2016 Conference, Cairns, Australia, 6–8 July 2016; pp. 819–828. [Google Scholar]
- Sepasgozar, S.M.E.; Lim, S.; Shirowzhan, S.; Kim, Y.M. Implementation of As-Built Information Modelling Using Mobile and Terrestrial Lidar Systems. In Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC 2014), Sydney, Australia, 9–11 July 2014. [Google Scholar]
- Sepasgozar, S.M.; Lim, S.; Shirowzhan, S. Implementation of Rapid As-built Building Information Modeling Using Mobile LiDAR. In Proceedings of the Construction Research Congress 2014, Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 209–218, ISBN 9780784413517. [Google Scholar]
- Shirowzhan, S.; Sepasgozar, S.; Liu, C. Monitoring physical progress of indoor buildings using mobile and terrestrial point clouds. In Proceedings of the Construction Research Congress 2018, Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018. [Google Scholar] [CrossRef]
- Goldbergs, G.; Levick, S.R.; Lawes, M.; Edwards, A. Hierarchical integration of individual tree and area-based approaches for savanna biomass uncertainty estimation from airborne LiDAR. Remote Sens. Environ. 2018, 205, 141–150. [Google Scholar] [CrossRef]
- Xu, Q.; Man, A.; Fredrickson, M.; Hou, Z.; Pitkänen, J.; Wing, B.; Ramirez, C.; Li, B.; Greenberg, J.A. Quantification of uncertainty in aboveground biomass estimates derived from small-footprint airborne LiDAR. Remote Sens. Environ. 2018, 216, 514–528. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Bossi, G.; Cavalli, M.; Crema, S.; Frigerio, S.; Quan Luna, B.; Mantovani, M.; Marcato, G.; Schenato, L.; Pasuto, A. Multi-temporal LiDAR-DTMs as a tool for modelling a complex landslide: A case study in the Rotolon catchment (eastern Italian Alps). Nat. Hazards Earth Syst. Sci. 2015, 15, 715–722. [Google Scholar] [CrossRef]
- Bitelli, G.; Conte, P.; Csoknyai, T.; Mandanici, E. Urban energetics applications and Geomatic technologies in a Smart City perspective. Int. Rev. Appl. Sci. Eng. 2015, 6, 19–29. [Google Scholar] [CrossRef]
- Hu, M.; Li, C. Design smart city based on 3S, internet of things, grid computing and cloud computing technology. In Internet of Things; Springer: Berlin/Heidelberg, Germany, 2012; pp. 466–472. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a high-resolution lidar terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef] [Green Version]
- Mennis, J.; Guo, D. Spatial data mining and geographic knowledge discovery: An introduction. Comput. Environ. Urban Syst. 2009, 33, 403–408. [Google Scholar] [CrossRef]
- Hudak, A.T.; Crookston, N.L.; Evans, J.S.; Hall, D.E.; Falkowski, M.J. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens. Environ. 2008, 112, 2232–2245. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Spaete, L.P.; Glenn, N.F.; Derryberry, D.R.; Sankey, T.T.; Mitchell, J.J.; Hardegree, S.P. Vegetation and slope effects on accuracy of a LiDAR-derived DEM in the sagebrush steppe. Remote Sens. Lett. 2011, 2, 317–326. [Google Scholar] [CrossRef]
- Shirowzhan, S.; Lim, S. Autocorrelation statistics-based algorithms for automatic ground and non-ground classification of Lidar data. In Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC), Sydney, Australia, 9–11 July 2014; Volume 31, p. 1. [Google Scholar]
- Su, W.; Sun, Z.; Zhong, R.; Huang, J.; Li, M.; Zhu, J.; Zhang, K.; Wu, H.; Zhu, D. A new hierarchical moving curve-fitting algorithm for filtering lidar data for automatic DTM generation. Int. J. Remote Sens. 2015, 36, 3616–3635. [Google Scholar] [CrossRef]
- Li, Z.; Hodgson, M.E.; Li, W. A general-purpose framework for parallel processing of large-scale LiDAR data. Int. J. Dig. Earth 2018, 11, 26–47. [Google Scholar] [CrossRef]
- Evans, M.R.; Oliver, D.; Yang, K.; Zhou, X.; Ali, R.Y.; Shekhar, S. Enabling spatial big data via CyberGIS: Challenges and opportunities. In CyberGIS for Geospatial Discovery and Innovation; Springer: Dordrecht, The Netherlands, 2019; pp. 143–170. [Google Scholar]
- Zheng, M.; Tang, W.; Lan, Y.; Zhao, X.; Jia, M.; Allan, C.; Trettin, C. Parallel Generation of Very High Resolution Digital Elevation Models: High-Performance Computing for Big Spatial Data Analysis. In Big Data in Engineering Applications; Springer Nature Singapore Pte Ltd.: Singapore, 2018; pp. 21–39. [Google Scholar]
- Bivand, R.; Krivoruchko, K. Big data sampling and spatial analysis: “which of the two ladles, of fig-wood or gold, is appropriate to the soup and the pot?”. Stat. Probab. Lett. 2018, 136, 87–91. [Google Scholar] [CrossRef]
- Bonczak, B.; Kontokosta, C.E. Large-scale parameterization of 3D building morphology in complex urban landscapes using aerial LiDAR and city administrative data. Comput. Environ. Urban Syst. 2019, 73, 126–142. [Google Scholar] [CrossRef]
- Guo, X.; Coops, N.C.; Gergel, S.E.; Bater, C.W.; Nielsen, S.E.; Stadt, J.J.; Drever, M. Integrating airborne lidar and satellite imagery to model habitat connectivity dynamics for spatial conservation prioritization. Landsc. Ecol. 2018, 33, 491–511. [Google Scholar] [CrossRef]
- Wentz, E.A.; York, A.M.; Alberti, M.; Conrow, L.; Fischer, H.; Inostroza, L.; Jantz, C.; Pickett, S.T.A.; Seto, K.C.; Taubenböck, H. Six fundamental aspects for conceptualizing multidimensional urban form: A spatial mapping perspective. Landsc. Urban Plan. 2018, 179, 55–62. [Google Scholar] [CrossRef]
- Kim, G.; Kim, A.; Kim, Y. A new 3D space syntax metric based on 3D isovist capture in urban space using remote sensing technology. Comput. Environ. Urban Syst. 2019, 74, 74–87. [Google Scholar] [CrossRef]
- Cooper, H.M.; Chen, Q.; Fletcher, C.H.; Barbee, M.M. Assessing vulnerability due to sea-level rise in Maui, Hawai ‘i using LiDAR remote sensing and GIS. Clim. Chang. 2013, 116, 547–563. [Google Scholar] [CrossRef]
- García-Ayllón, S. Retro-diagnosis methodology for land consumption analysis towards sustainable future scenarios: Application to a mediterranean coastal area. J. Clean. Prod. 2018, 195, 1408–1421. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Crespo-Matellan, E.; Hernandez-Lopez, D.; Rodriguez-Gonzalvez, P. Automated urban analysis based on lidar-derived building models. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1844–1851. [Google Scholar] [CrossRef]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shirowzhan, S.; Sepasgozar, S.M.E. Spatial Analysis Using Temporal Point Clouds in Advanced GIS: Methods for Ground Elevation Extraction in Slant Areas and Building Classifications. ISPRS Int. J. Geo-Inf. 2019, 8, 120. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8030120
Shirowzhan S, Sepasgozar SME. Spatial Analysis Using Temporal Point Clouds in Advanced GIS: Methods for Ground Elevation Extraction in Slant Areas and Building Classifications. ISPRS International Journal of Geo-Information. 2019; 8(3):120. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8030120
Chicago/Turabian StyleShirowzhan, Sara, and Samad M. E. Sepasgozar. 2019. "Spatial Analysis Using Temporal Point Clouds in Advanced GIS: Methods for Ground Elevation Extraction in Slant Areas and Building Classifications" ISPRS International Journal of Geo-Information 8, no. 3: 120. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8030120