
High Resolution-Based Coherent Photonic Radar Sensor for Multiple Target Detections

 ,
,  ,
,
Abstract
:1. Introduction
2. Major Contribution and Principle of Photonic Radar
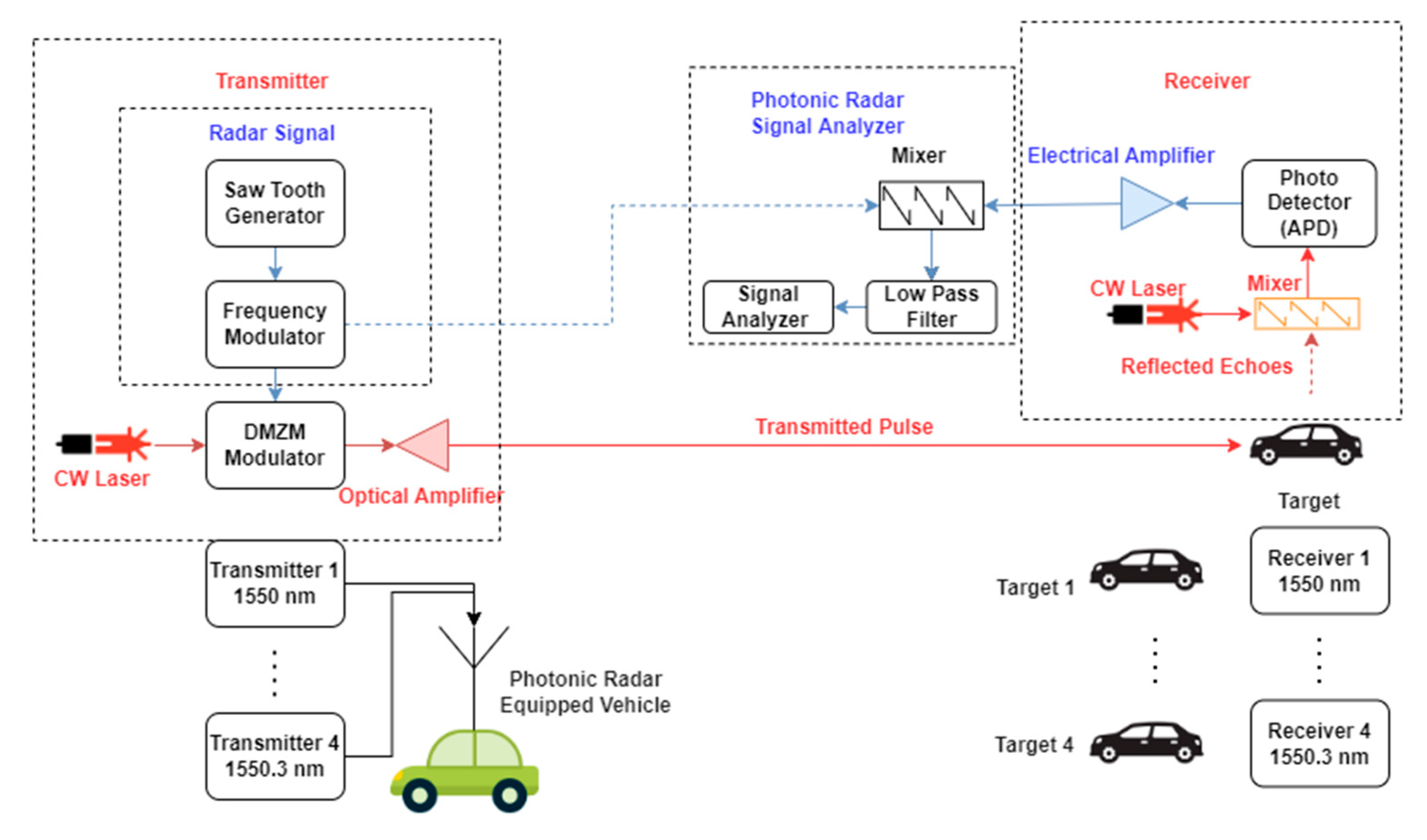
3. Proposed Photonic Radar Modeling
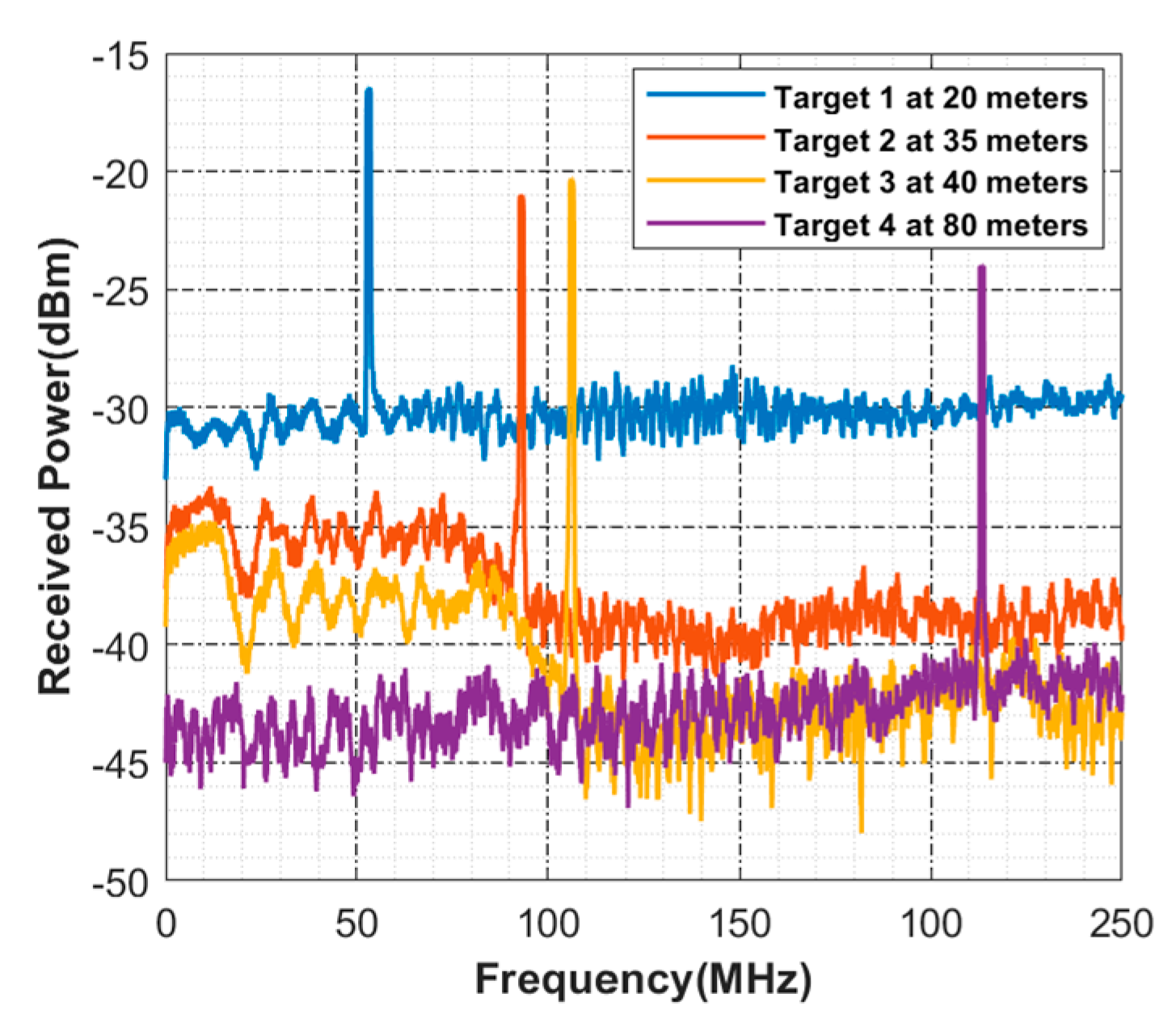
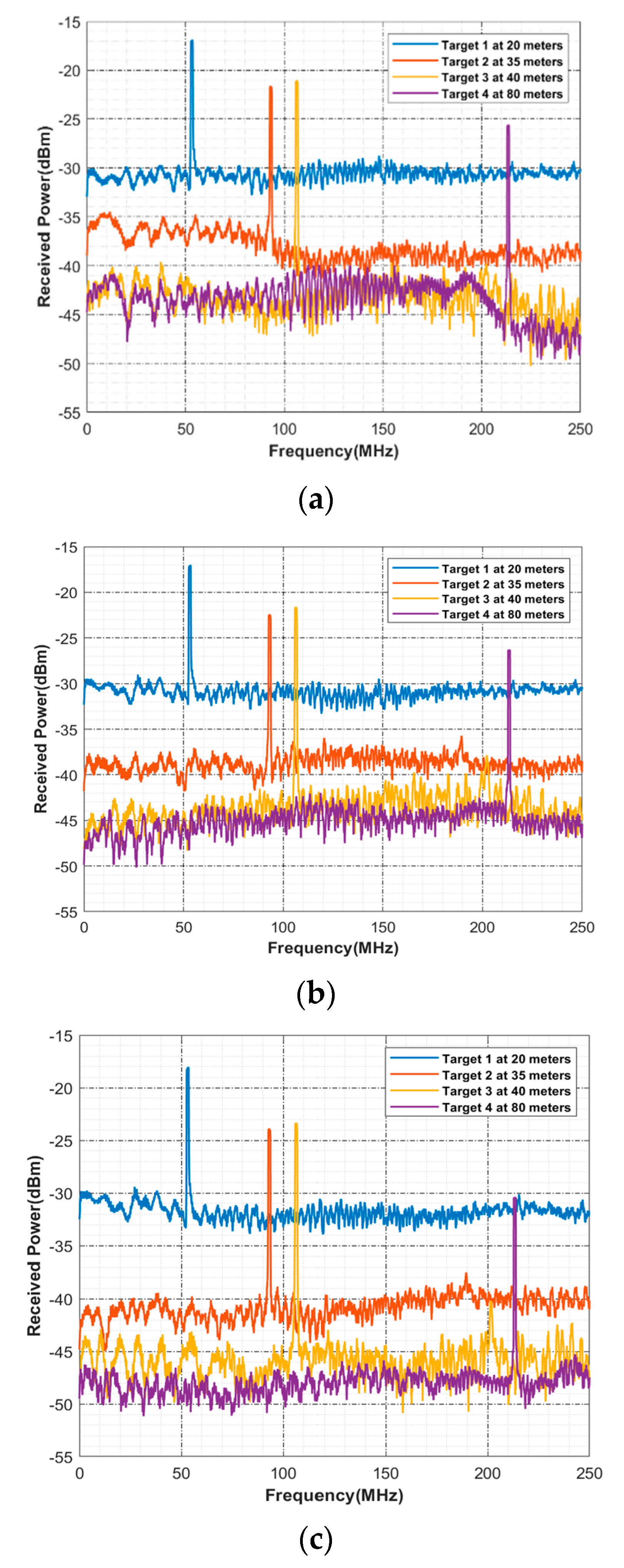
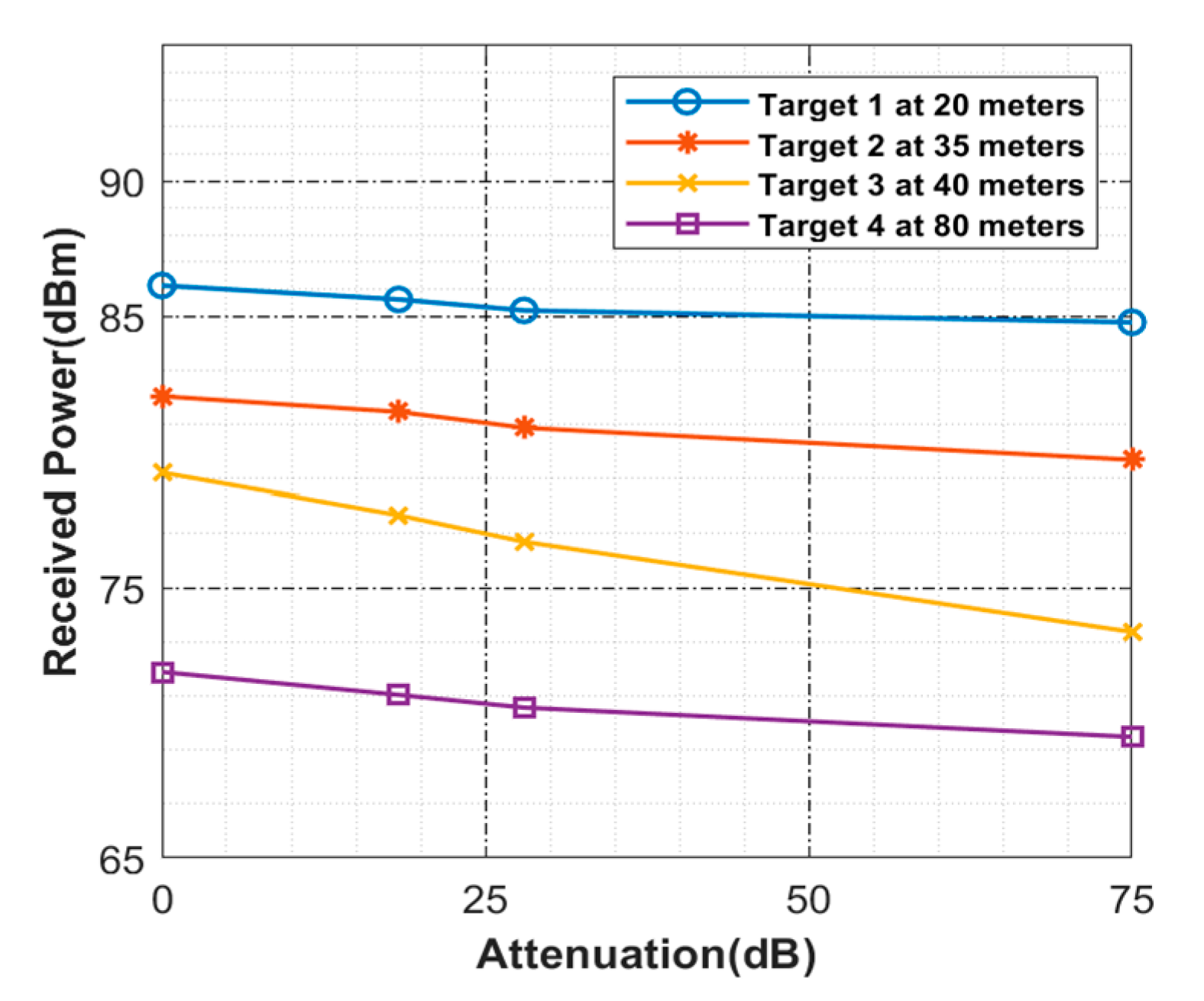
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Levulytė, L.; Baranyai, D.; Sokolovskij, E.; Török, Á. Pedestrians’ role in road accidents. Int. J. Traffic Transp. Eng. 2017, 7, 328–341. [Google Scholar]
- Vaa, T.; Penttinen, M.; Spyropoulou, I. Intelligent transport systems and effects on road traffic accidents: State of the art. IET Intell. Transp. Syst. 2007, 1, 81–88. [Google Scholar] [CrossRef]
- Nchimbi, S.; Dida, M.; Marwa, J.; Michael, K. MAGITS: A mobile-based information sharing framework for integrating intelligent transport system in agro-goods e-commerce in developing countries. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 714–725. [Google Scholar] [CrossRef]
- Molebny, V. Nick-named laser radars. Adv. Opt. Technol. 2019, 8, 425–435. [Google Scholar] [CrossRef]
- Ghelfi, P.; Laghezza, F.; Scotti, F.; Serafino, G.; Capria, A.; Pinna, S.; Onori, D.; Porzi, C.; Scaffardi, M.; Malacarne, A.; et al. A fully photonics-based coherent radar system. Nature 2014, 507, 341–345. [Google Scholar] [CrossRef]
- Baxter, J.A.; Merced, D.A.; Costinett, D.J.; Tolbert, L.M.; Ozpineci, B. Review of Electrical Architectures and Power Requirements for Automated Vehicles. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 944–949. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radar: A way of the future. IEEE Signal Processing Mag. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Scheer, J.A. Coherent radar system performance estimation. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; IEEE: Piscataway, NJ, USA, 1990; pp. 125–128. [Google Scholar]
- Richards, M.A.; Scheer, J.; Holm, W.A.; Melvin, W.L. Principles of Modern Radar; SciTech Publishing, Inc.: Raleigh, NC, USA, 2010. [Google Scholar]
- Series, P. Attenuation by atmospheric gases and related effects. Recommendation ITU-R 2019, 676-12. [Google Scholar]
- Peynot, T.; Underwood, J.; Scheding, S. Towards reliable perception for unmanned ground vehicles in challenging conditions. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1170–1176. [Google Scholar]
- Rasshofer, R.H.; Spies, M.; Spies, H. Influences of weather phenomena on automotive laser radar systems. Adv. Radio Sci. 2011, 9, 49–60. [Google Scholar] [CrossRef]
- Liu, X.; Wang, K. Research on high-resolution wide-swath SAR based on microwave photonics. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–3. [Google Scholar]
- Meng, Z.; Li, J.; Yin, C.; Fan, Y.; Yin, F.; Zhou, Y.; Dai, Y.; Xu, K. Dual-band dechirping LFMCW radar receiver with high image rejection using microwave photonic I/Q mixer. Opt. Express 2017, 25, 22055–22065. [Google Scholar] [CrossRef]
- Li, R.; Li, W.; Ding, M.; Wen, Z.; Li, Y.; Zhou, L.; Yu, S.; Xing, T.; Gao, B.; Luan, Y.; et al. Demonstration of a microwave photonic synthetic aperture radar based on photonic-assisted signal generation and stretch processing. Opt. Express 2017, 25, 14334–14340. [Google Scholar] [CrossRef]
- Qian, N.; Zou, W.; Zhang, S.; Chen, J. Signal-to-noise ratio improvement of photonic time-stretch coherent radar enabling high-sensitivity ultrabroad W-band operation. Opt. Lett. 2018, 43, 5869–5872. [Google Scholar] [CrossRef] [PubMed]
- Cao, J.; Li, R.; Yang, J.; Mo, Z.; Dong, J.; Zhang, X.; Jiang, W.; Li, W. Photonic deramp receiver for dual-band LFM-CW radar. J. Lightwave Technol. 2019, 37, 2403–2408. [Google Scholar] [CrossRef]
- Cheng, R.; Wei, W.; Xie, W.; Dong, Y. Photonic generation of programmable coherent linear frequency modulated signal and its application in X-band radar system. Opt. Express 2019, 27, 37469–37480. [Google Scholar] [CrossRef] [PubMed]
- Sharma, A.; Malhotra, J. Simulative investigation of FMCW based optical photonic radar and its different configurations. Opt. Quantum Electron. 2022, 54, 233. [Google Scholar] [CrossRef]
- Sharma, A.; Chaudhary, S.; Malhotra, J.; Saadi, M.; Al Otaibi, S.; Nebhen, J.; Wuttisittikulkij, L. A Cost-Effective Photonic Radar under Adverse Weather conditions for Autonomous Vehicles by incorporating Frequency Modulated Direct Detection Scheme. Front. Phys. 2021, 14, 467. [Google Scholar] [CrossRef]
- Sharma, A.; Chaudhary, S.; Malhotra, J.; Saadi, M.; Al Otaibi, S.; Nebhen, J.; Wuttisittikulkij, L. Coherent detection-based photonic radar for autonomous vehicles under diverse weather conditions. PLoS ONE 2021, 16, e0259438. [Google Scholar]
- Bae, Y.; Shin, J.; Lee, S.-G.; Kim, H. Field Experiment of Photonic Radar for Low-RCS Target Detection and High-Resolution Image Acquisition. IEEE Access 2021, 9, 63559–63566. [Google Scholar] [CrossRef]
- Ding, Y.; Guo, S.; Wu, H.; Wang, D.; Li, J.; Yang, Y.; Cui, F.; Dong, W. Dual-Chirp Photonics-Based Radar for Distance and Velocity Measurement Based on Compressive Sensing. IEEE Photonics J. 2022, 14, 1–7. [Google Scholar] [CrossRef]
- Zhang, W.; Li, N.; Yu, J.; Kasper, E. A Compact Single-Board Solution for Commercializing Cost-Effective 77 GHz Automotive Front Radar. In Proceedings of the 2020 IEEE Asia-Pacific Microwave Conference (APMC), Hong Kong, China, 8–11 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1098–1100. [Google Scholar]
- Ramasubramanian, K.; Ramaiah, K. Moving from legacy 24 ghz to state-of-the-art 77-ghz radar. ATZelektronik Worldw. 2018, 13, 46–49. [Google Scholar] [CrossRef]
- Piatek, S.; Li, J. A photonics guide to the autonomous vehicle market. Laser Focus World 2017, 53, 28–31. [Google Scholar]
- Gao, S.; Hui, R. Frequency-modulated continuous-wave lidar using I/Q modulator for simplified heterodyne detection. Opt. Lett. 2012, 37, 2022–2024. [Google Scholar] [CrossRef] [PubMed]
- Elghandour, A.H.; Ren, C.D. Modeling and comparative study of various detection techniques for FMCW LIDAR using optisystem. In International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications; International Society for Optics and Photonics; SPIE: Bellingham, WA, USA, 2013; Volume 8905, p. 890529. [Google Scholar]
- Gultepe, I.; Tardif, R.; Michaelides, S.C.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.D.; Pagowski, M.; Hansen, B.; Ellrod, G.; et al. Fog research: A review of past achievements and future perspectives. Pure Appl. Geophys. 2007, 164, 1121–1159. [Google Scholar] [CrossRef]
- Bloom, S.; Korevaar, E.; Schuster, J.; Willebrand, H. Understanding the performance of free-space optics. J. Opt. Netw. 2003, 2, 178–200. [Google Scholar] [CrossRef] [Green Version]
- Zabidi, S.A.; Islam, M.R.; Al Khateeb, W.; Naji, A.W. Investigating of rain attenuation impact on free space optics propagation in tropical region. In Proceedings of the 2011 4th International Conference on Mechatronics (ICOM), Kuala Lumpur, Malaysia, 17–19 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6. [Google Scholar]
- Huang, Y.; Wu, D.; Wu, P. Experimental Study of the Attenuation Effect of a Laser in a Foggy Environment in an FSO System. In Proceedings of the 2021 IEEE 4th International Conference on Electronics and Communication Engineering (ICECE), Xi’an, China, 17–19 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 271–276. [Google Scholar]
- Zhang, F.; Guo, Q.; Pan, S. Photonics-based real-time ultra-high-range-resolution radar with broadband signal generation and processing. Sci. Rep. 2018, 7, 13848. [Google Scholar] [CrossRef] [PubMed] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameters | Value |
|---|---|---|
| Continuous wavelength Laser | Wavelength | |
| Transmitter 1 | 1550 nm | |
| Transmitter 2 | 1550.1 nm | |
| Transmitter 3 | 1550.2 nm | |
| Transmitter 4 | 1550.3 nm | |
| Linewidth | 0.01 MHz | |
| Power | 0.1 mW | |
| Dual Port Mechzender modulator (DMZM) | Extinction ratio | 30 dB |
| Switching bias voltage | 4 V | |
| Switching RF voltage | 4 V | |
| Bias Voltage | +1 V, −1 V | |
| Simulation window | Sweep time | |
| Photodetector (PIN) | Responsivity | 1 A/W |
| Dark current | 1 nA | |
| Thermal noise bandwidth | 410 MHz | |
| Absolute temperature | 290 K | |
| Load resistance | 50 Ω | |
| Shot noise bandwidth | 410 MHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaudhary, S.; Sharma, A.; Khichar, S.; Tang, X.; Wei, X.; Wuttisittikulkij, L. High Resolution-Based Coherent Photonic Radar Sensor for Multiple Target Detections. J. Sens. Actuator Netw. 2022, 11, 49. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan11030049
Chaudhary S, Sharma A, Khichar S, Tang X, Wei X, Wuttisittikulkij L. High Resolution-Based Coherent Photonic Radar Sensor for Multiple Target Detections. Journal of Sensor and Actuator Networks. 2022; 11(3):49. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan11030049
Chicago/Turabian StyleChaudhary, Sushank, Abhishek Sharma, Sunita Khichar, Xuan Tang, Xian Wei, and Lunchakorn Wuttisittikulkij. 2022. "High Resolution-Based Coherent Photonic Radar Sensor for Multiple Target Detections" Journal of Sensor and Actuator Networks 11, no. 3: 49. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan11030049