Dynamic Characterization of a High-Altitude Balloon during a Flight Campaign for the Detection of ISM Radio Background in the Stratosphere


Abstract
:1. Introduction
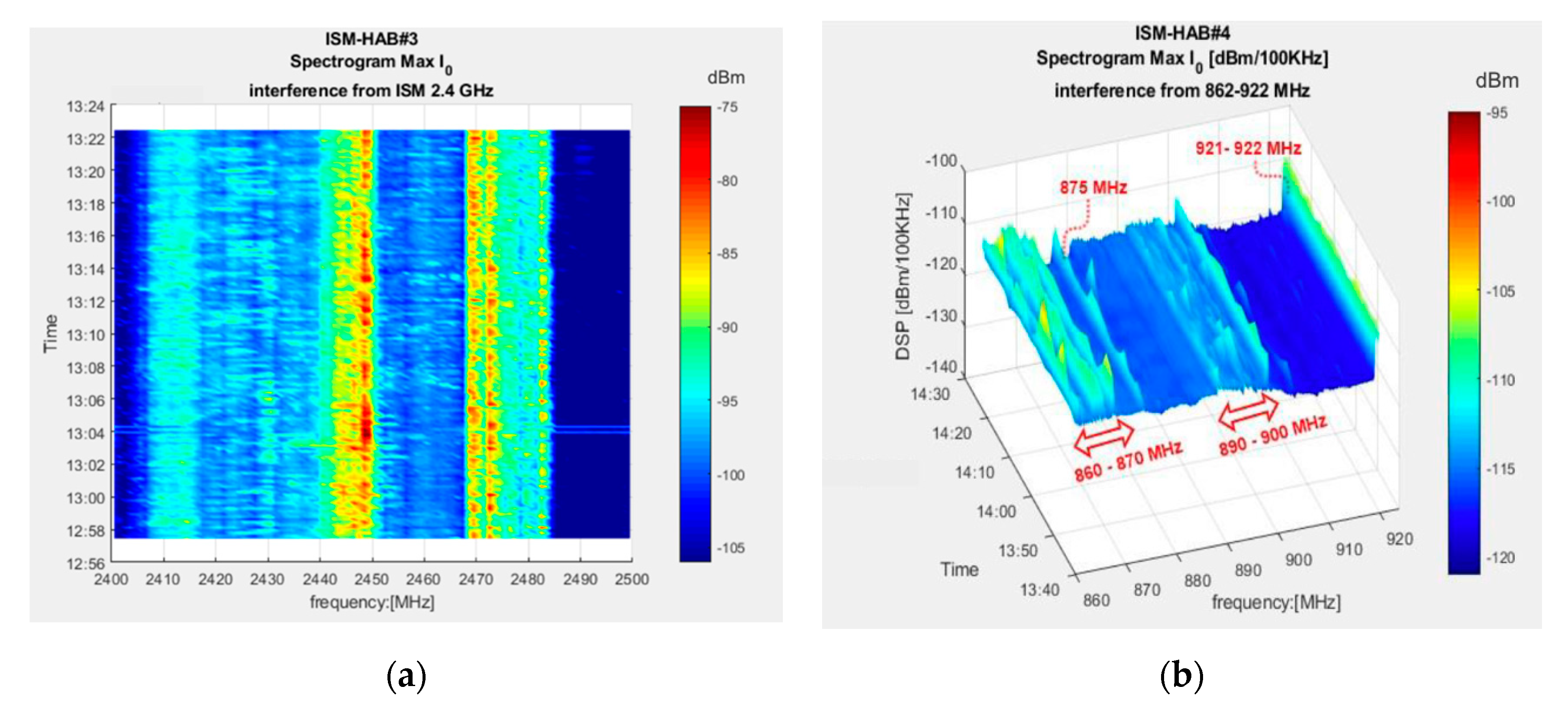
- S band (2.4 GHz ISM band): 2400–2483 MHz (83 MHz bandwidth).
- Ultra High Frequency (UHF) band (868 MHz and 900 MHz ISM bands): 862–922 MHz (60 MHz bandwidth).
2. Experimental Setup and Mission Architecture
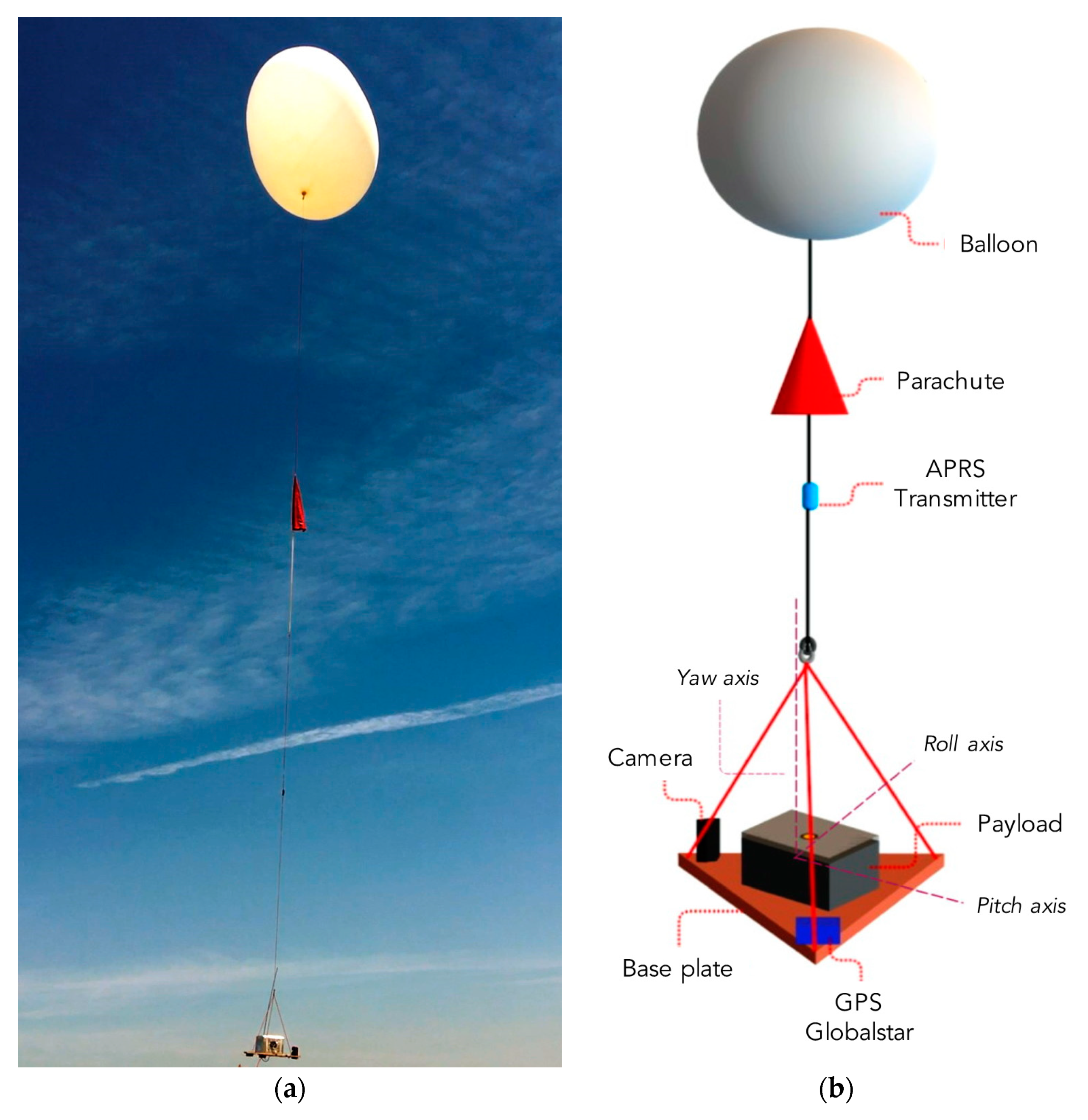
2.1. The ISM-HAB Platform
- The tracking payload, used to track the HAB and to collect data from the on-board sensors.
- The RF payload, used to perform the measurement of the aggregated RF power received over the bands of interest.
- The dynamics payload, including the IMU and the associated data handling and storage systems.
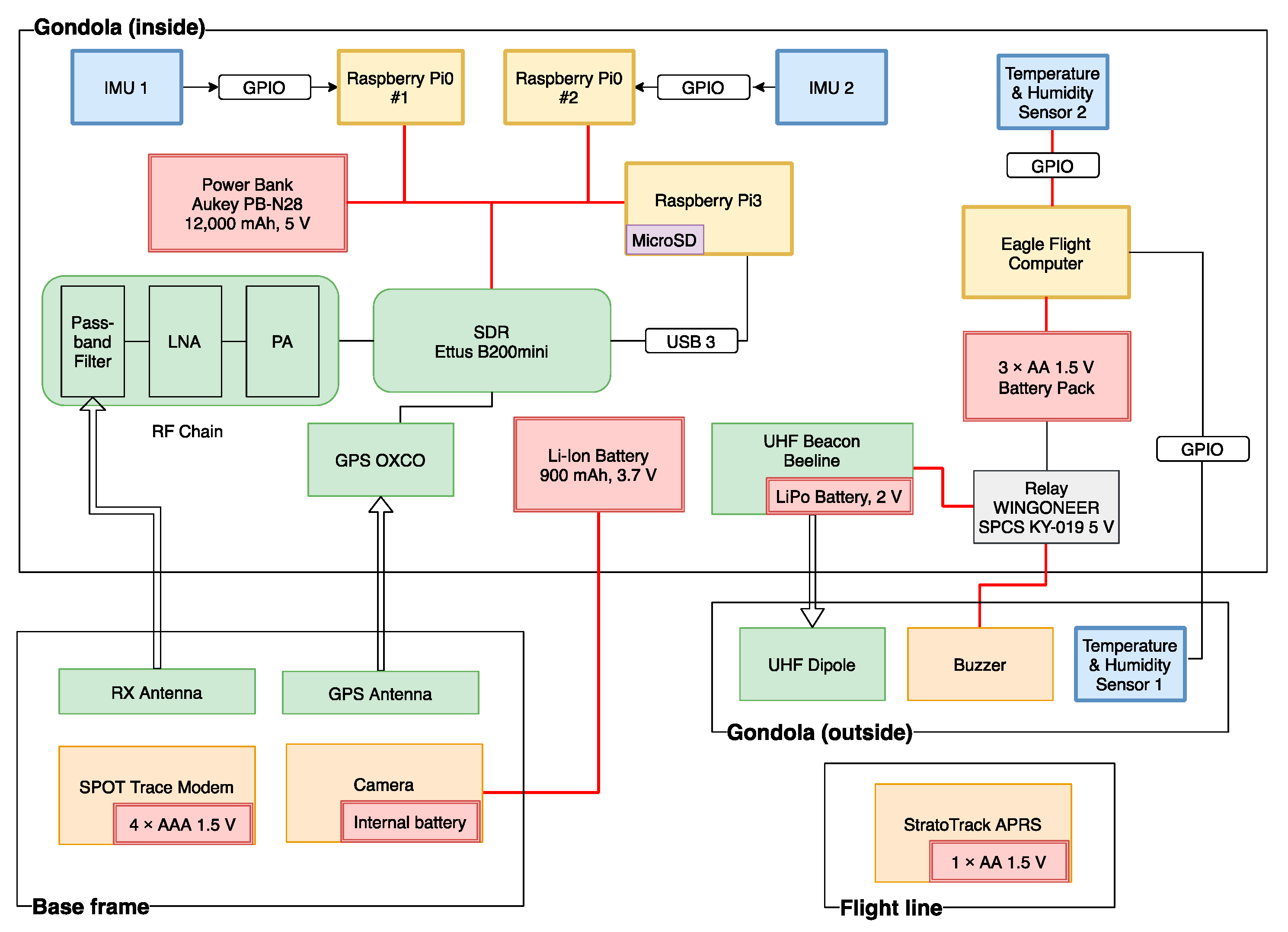
2.2. Tracking Payload
- The APRS transmitter (StratoTrack model by StratoGear [15]) transmits, every few minutes (three available TX periods of 1.5 to 15 min), the position of the HAB collected by the GPS modules embedded in the module, as well as a few additional pieces of information such as the external temperature, GPS lock quality and voltage of its battery pack (Figure 5a). Data are transmitted using the dedicated Very High Frequency (VHF) channel (144.80 MHz) and collected by one or more of the many existing amateur-operated APRS receiving stations and can be accessed using the APRS public website (https://aprs.fi).
- The SPOT Trace Modem [16] transmits the position of the balloon using the Globalstar LEO constellation every few minutes (Figure 5b). The service is very reliable, with the modem capable to successfully transmit the position even if the payload lands deep in the woodlands (as happened 4 times out of 5 in this project).
- The on-board computer, namely the Eagle Flight model by High-Altitude Science (HAS) [17], that collects data with a periodicity of 6 s from its embedded GPS receivers as well as from its own two temperature and pressure sensors (Figure 5c). One sensor is installed outdoors in order to record the external temperature and pressure while the second one is located within the Styrofoam box.
- The UHF Beacon, namely a BeeLine Transmitter, that is used to transmit a beacon on 433 MHz used to locate the landed HAB using a UHF Fox Hunter. As the signal cannot be emitted while flying, the UHF beacon is only activated at landing, using a relay controlled by a Raspberry Pi 3 microcomputer.
- The 433 MHz controlled buzzer that is used to emit a sound to help recovery of the landed payload during the night or within woodlands.
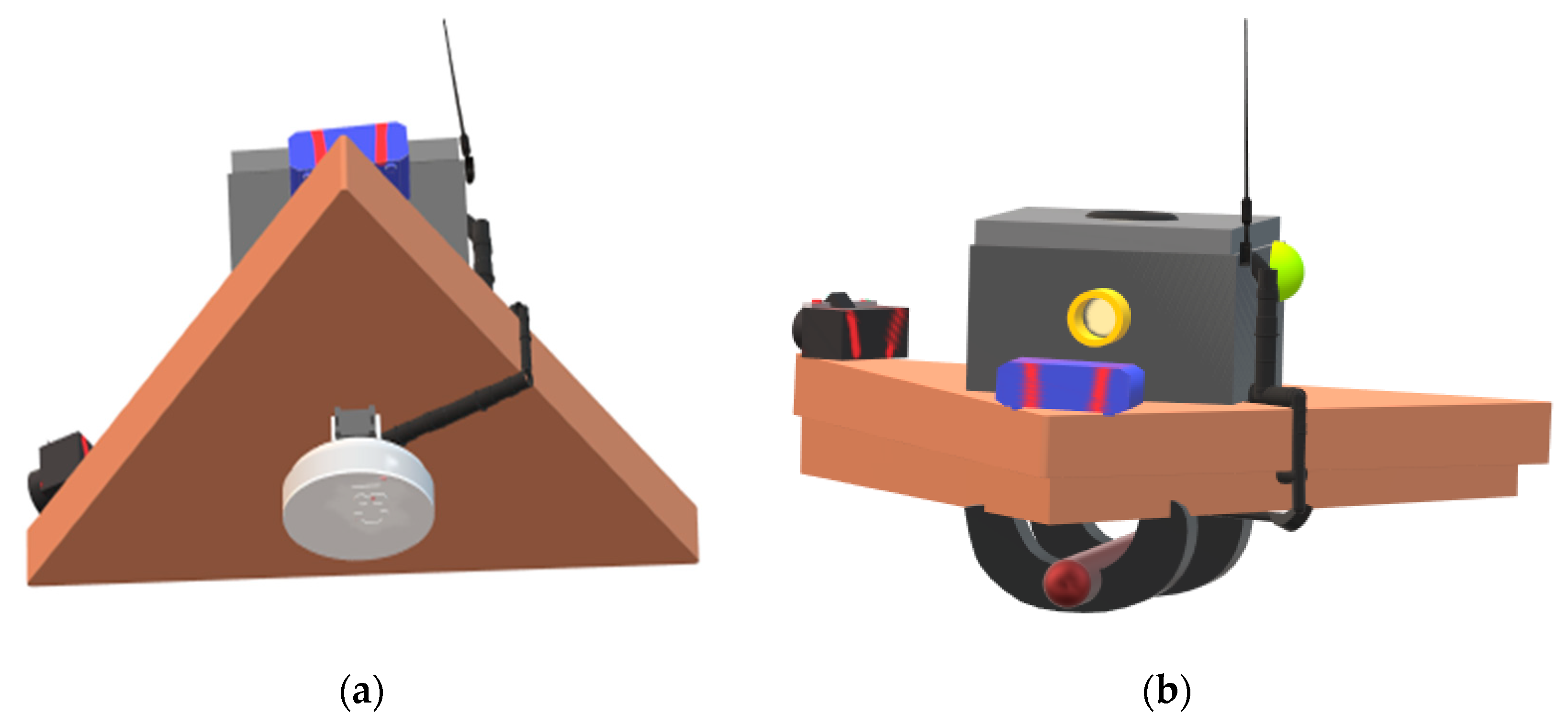
- A video camera used to record video during the flight. The position of the video camera was changed before every mission in order to adjust the view or to image in different directions.
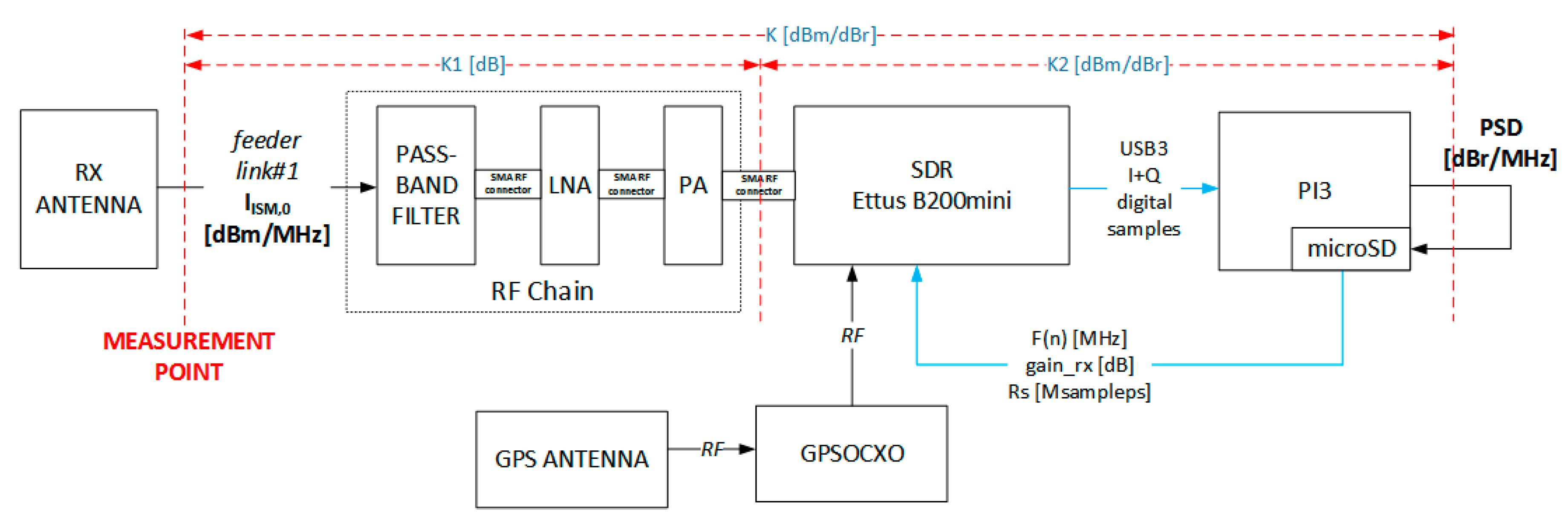
2.3. RF Payload
2.4. Dynamics Payload
3. Mission Operations
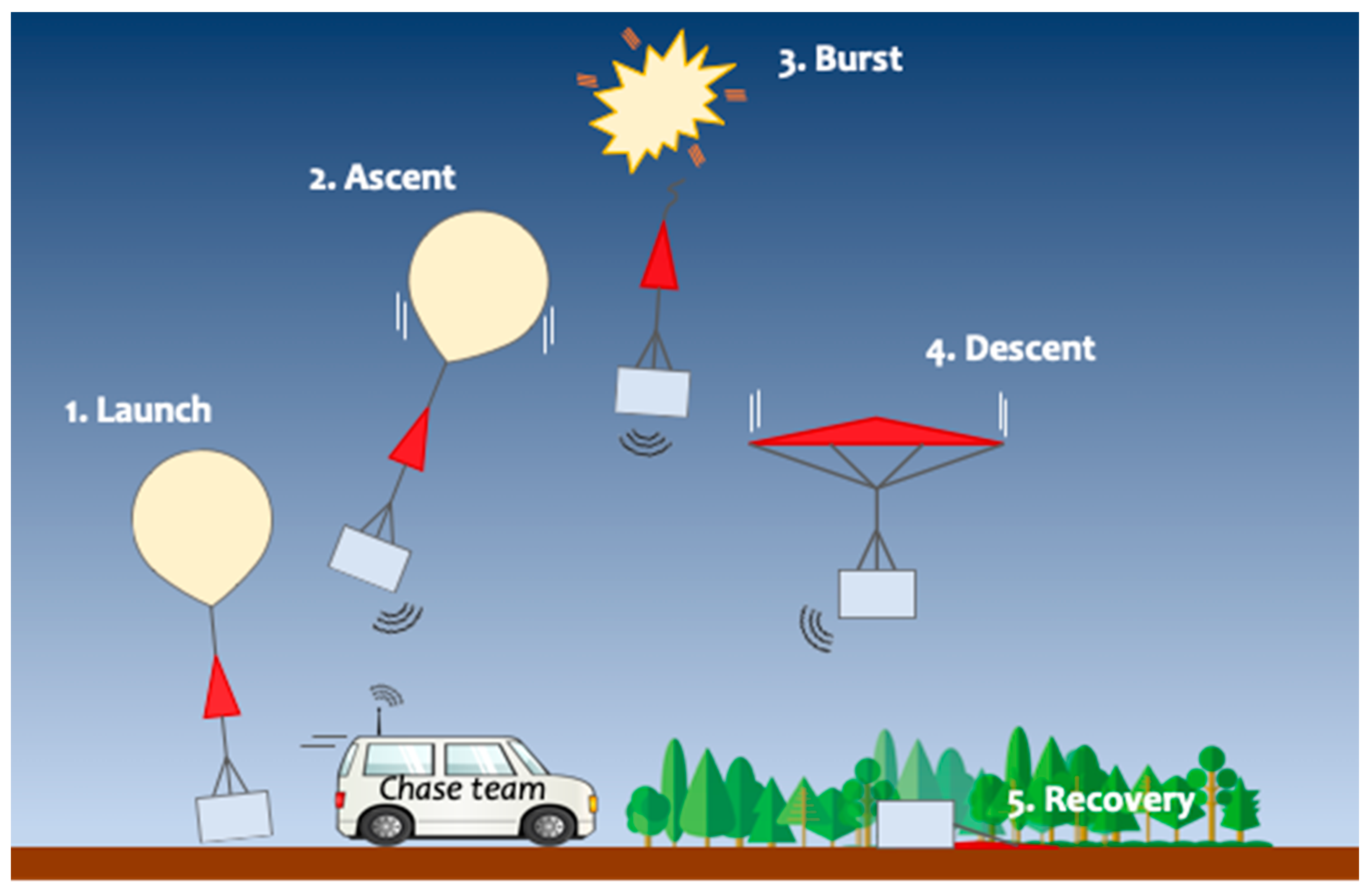
3.1. Mission Phases
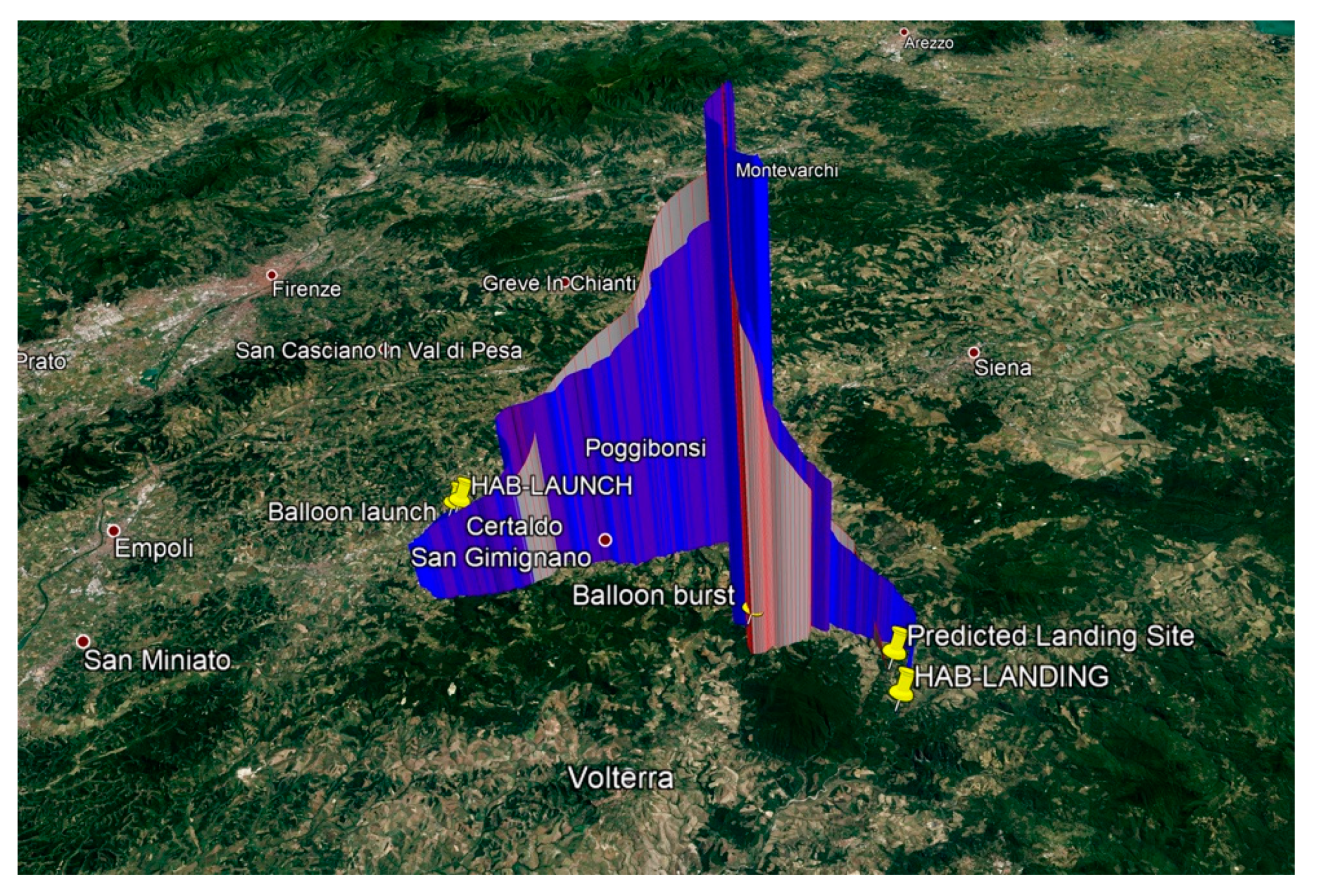
3.2. Flight Predictions
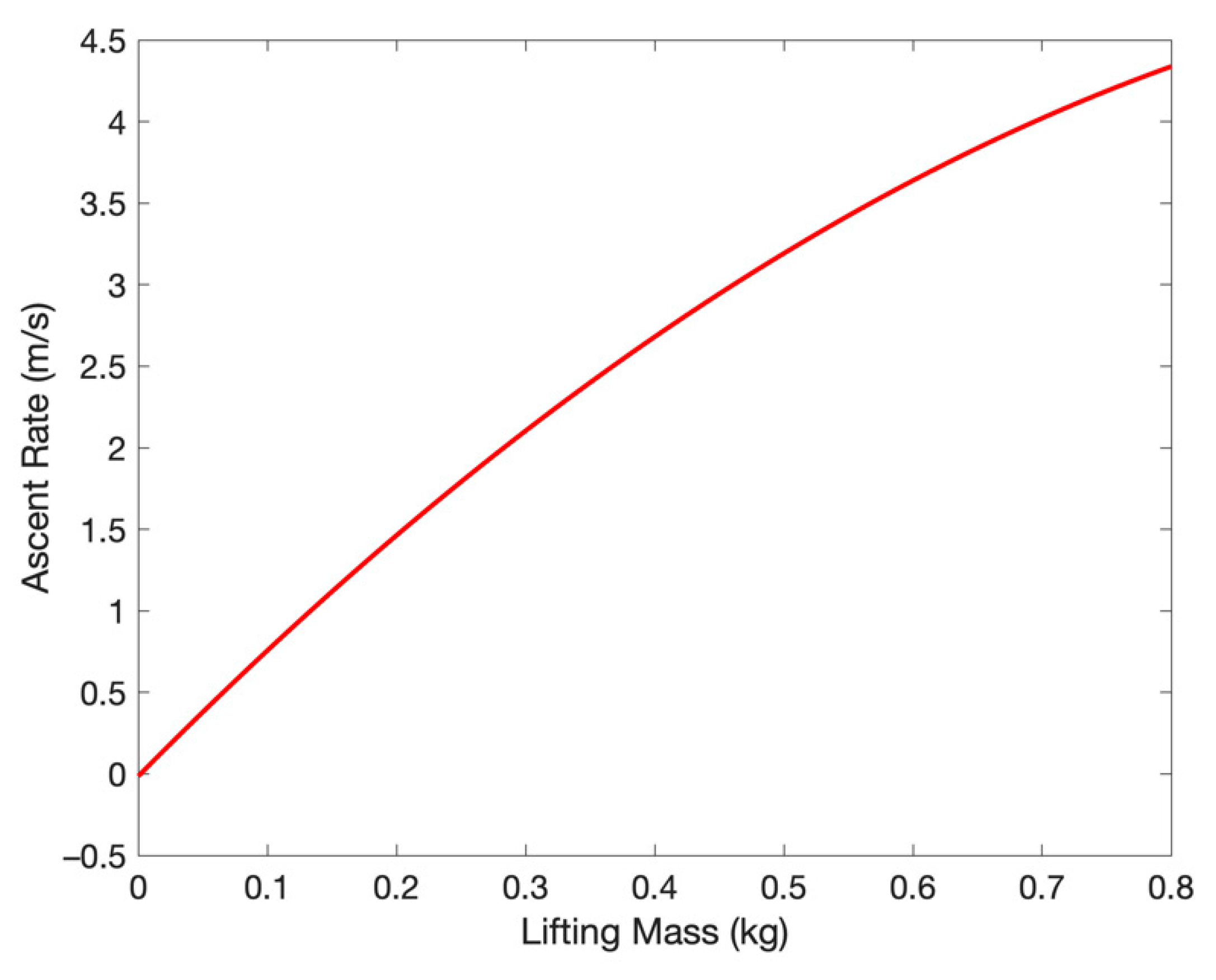
3.2.1. Modeling of the Ascent
3.2.2. Modeling of the Horizontal Motion
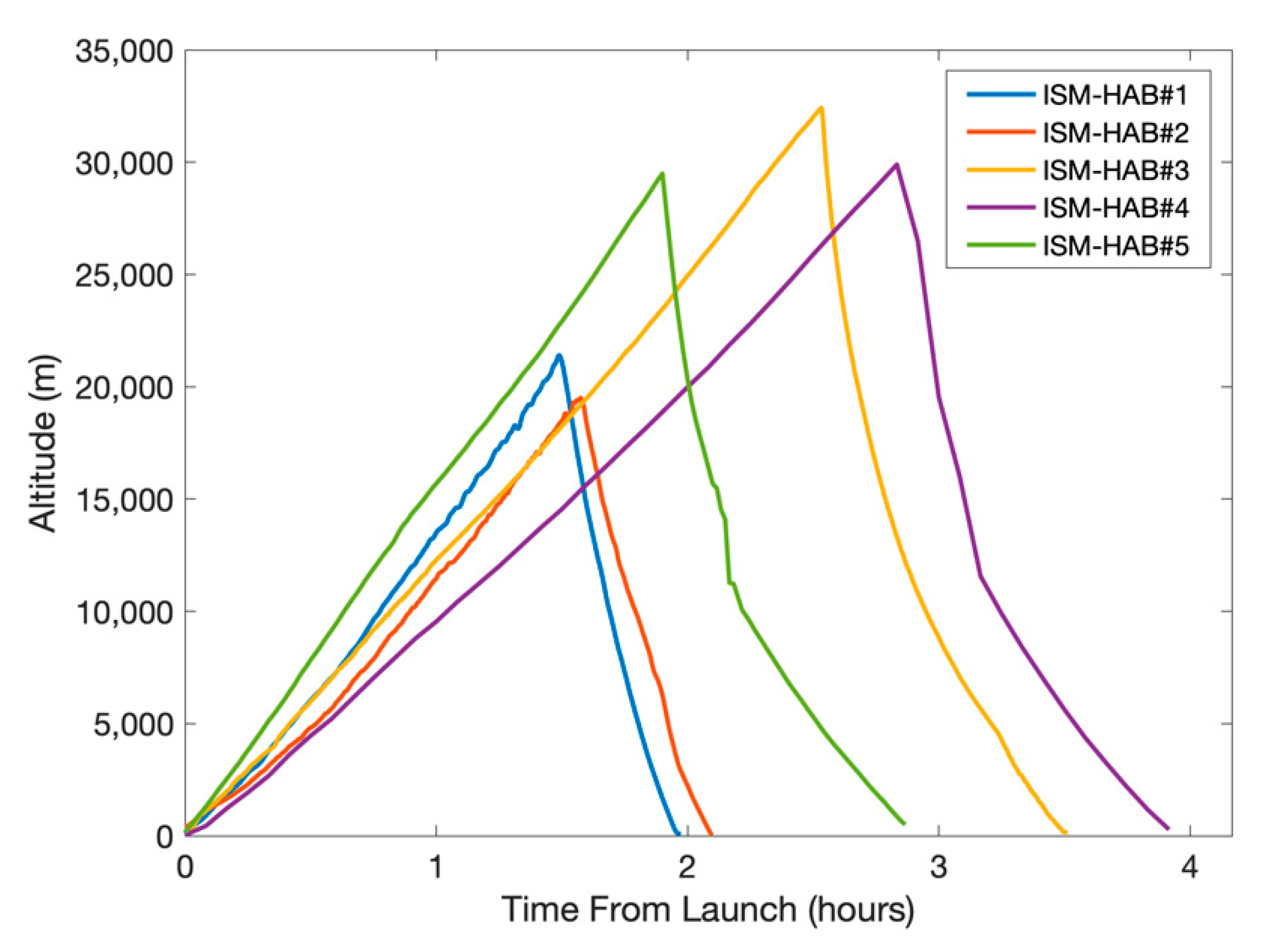
3.3. Overview of the ISM-HAB Flights
- ISM-HAB#1: The balloon payload included only the tracking systems and the dynamics package. Burst altitude was about 10 km lower than expected. The reason for the early burst was later traced to the accumulation of ice on the balloon during ascent through a thick layer of clouds.
- ISM-HAB#2: Full payload, including the RF measurement system. No RF measurement was recorded due to a software glitch. Once again, the balloon suffered from an early bursting, traced back to accumulation of ice due to launch in bad weather, with ground-level rain.
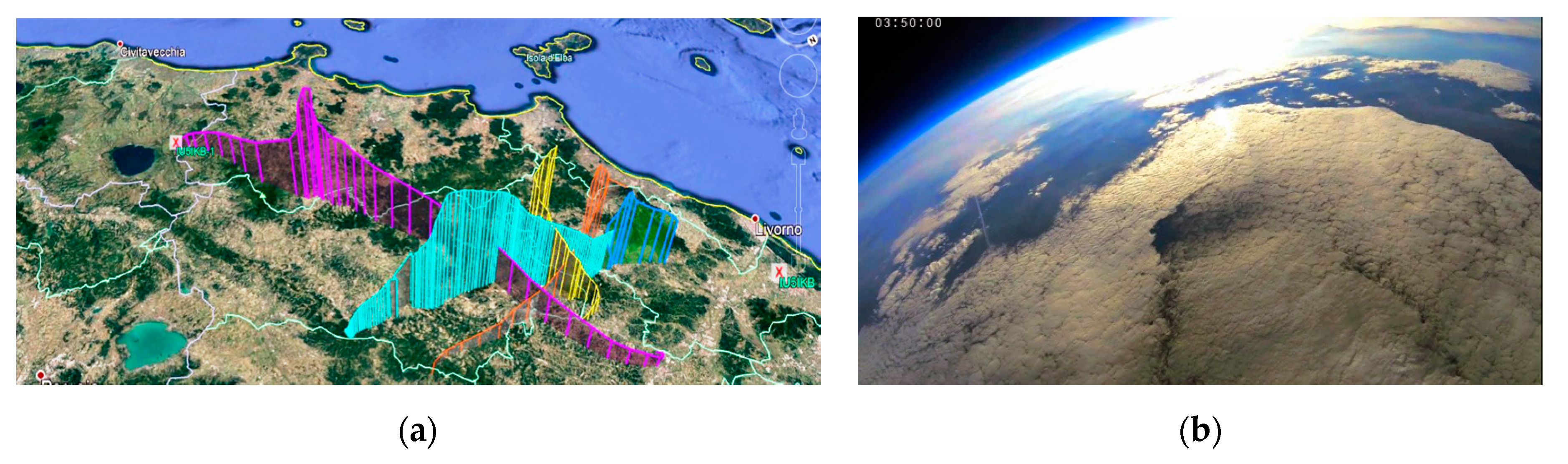
- ISM-HAB#3: The flight was a complete success. A 1080p camera was placed on the base plate, producing excellent pictures (Figure 10b).
- ISM-HAB#4: This launch worked perfectly as far as the recording of measurements was concerned; however, the balloon was inflated insufficiently due to a failed helium bottle. The initial lifting force was lower than optimal, resulting in a very slow ascent rate. The balloon spent a considerable amount of time inside strong lateral winds and landed about 140 km further than expected, making recovery more complex.
- ISM-HAB#5: For the final launch, transmission from a ground station was received on the balloon, allowing to verify the proper working of the tracking and antenna pointing models.
4. Results and Analysis
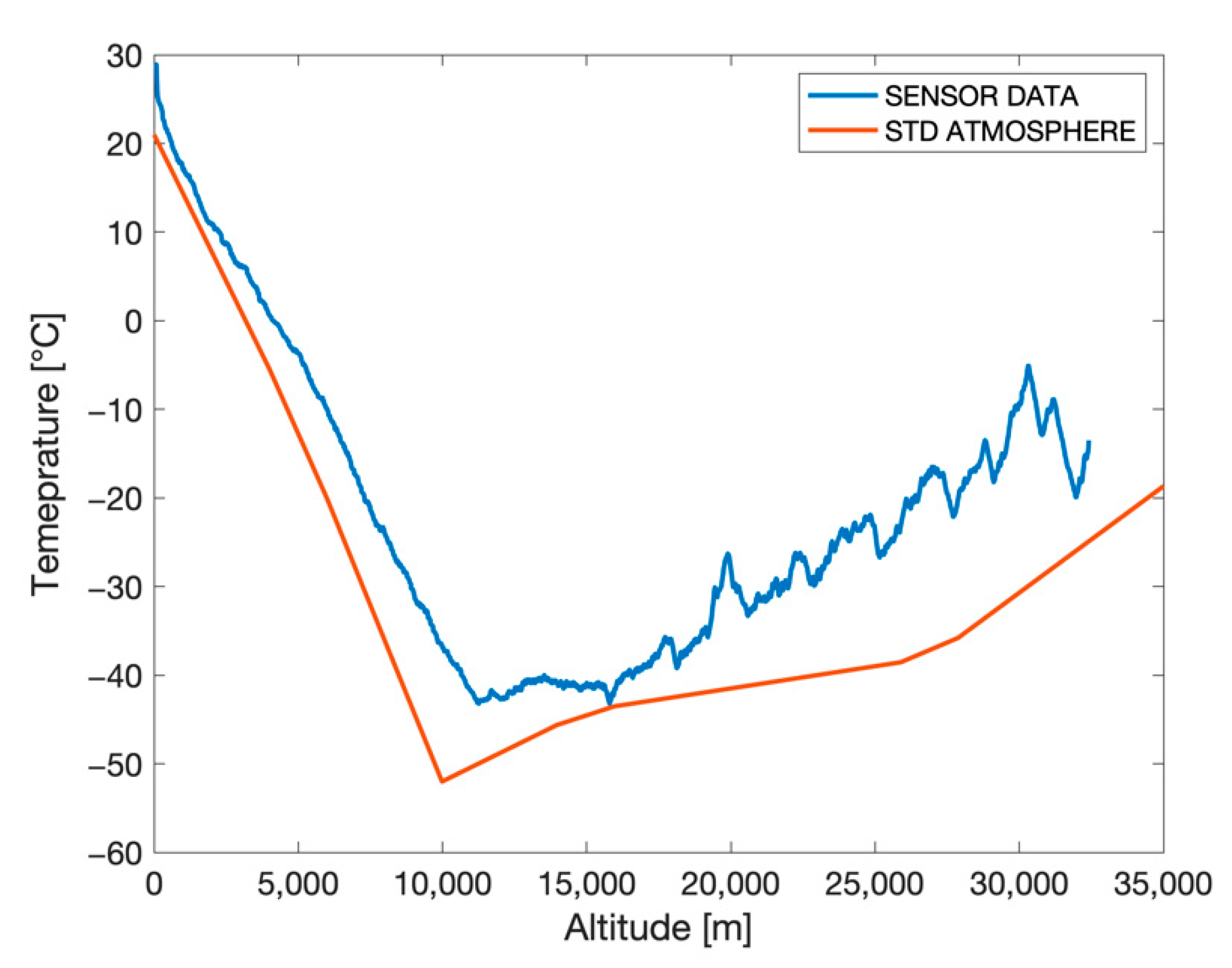
4.1. Internal and External Temperature
4.2. RF Measurements
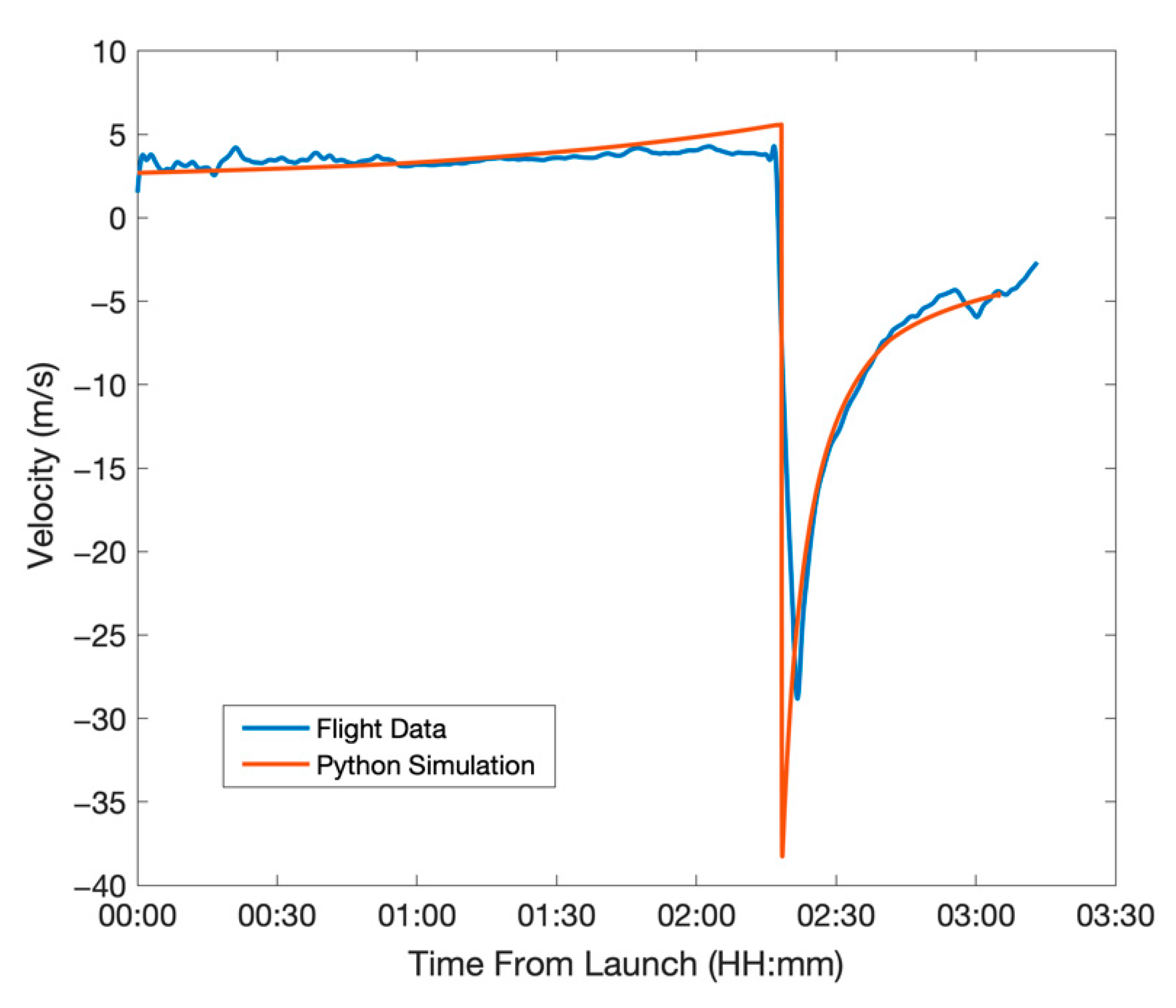
4.3. Vertical Motion
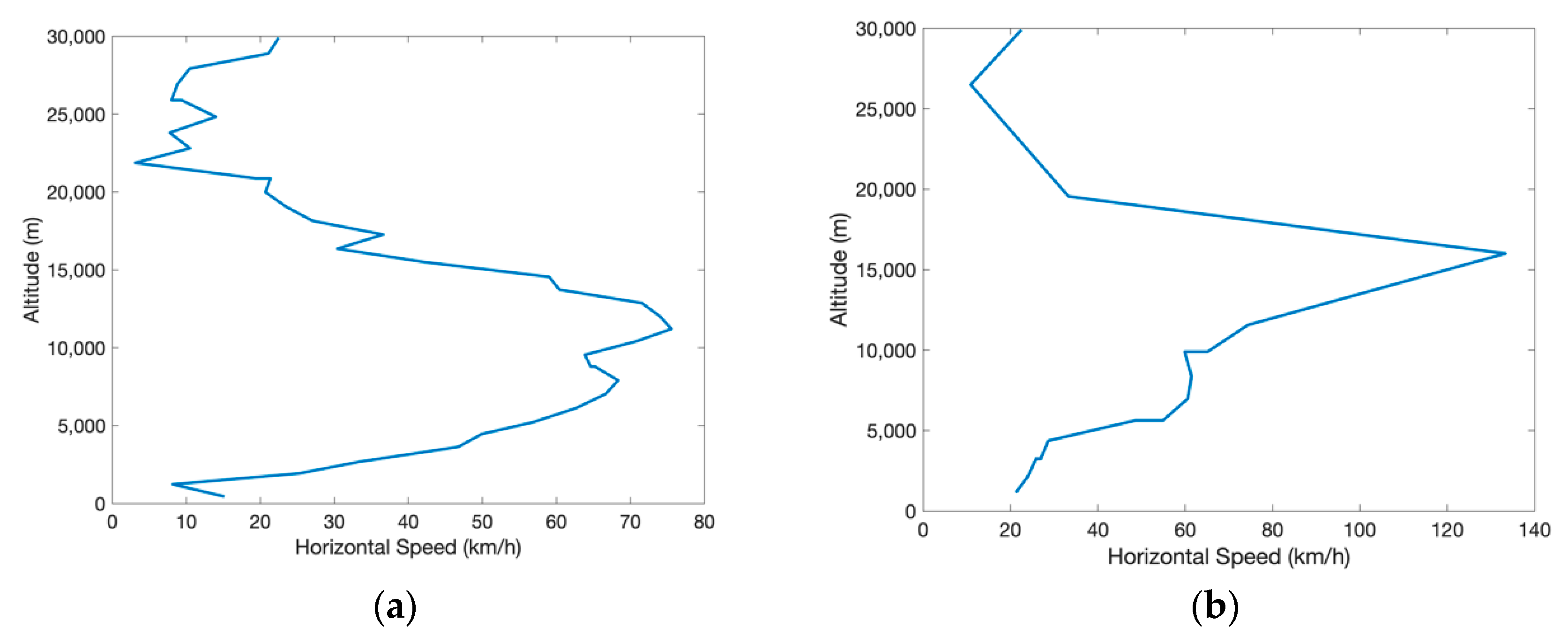
4.4. Horizontal Motion
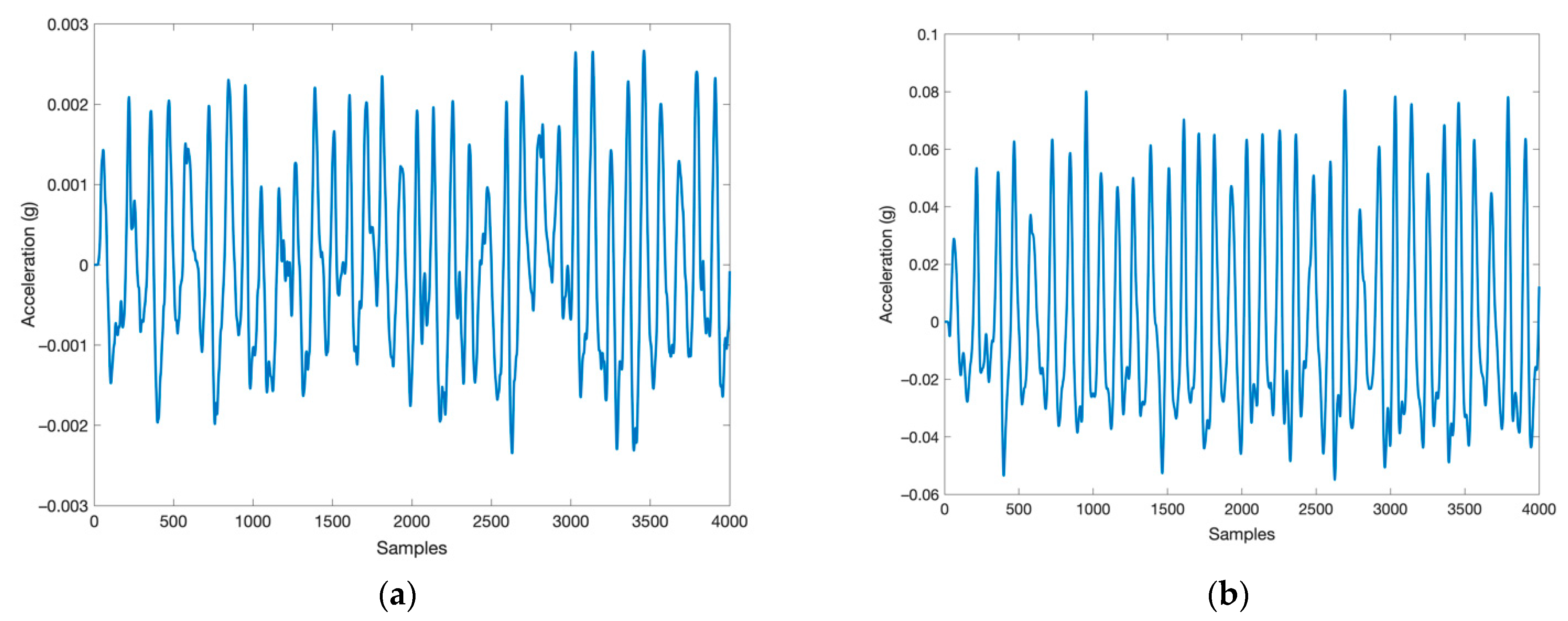
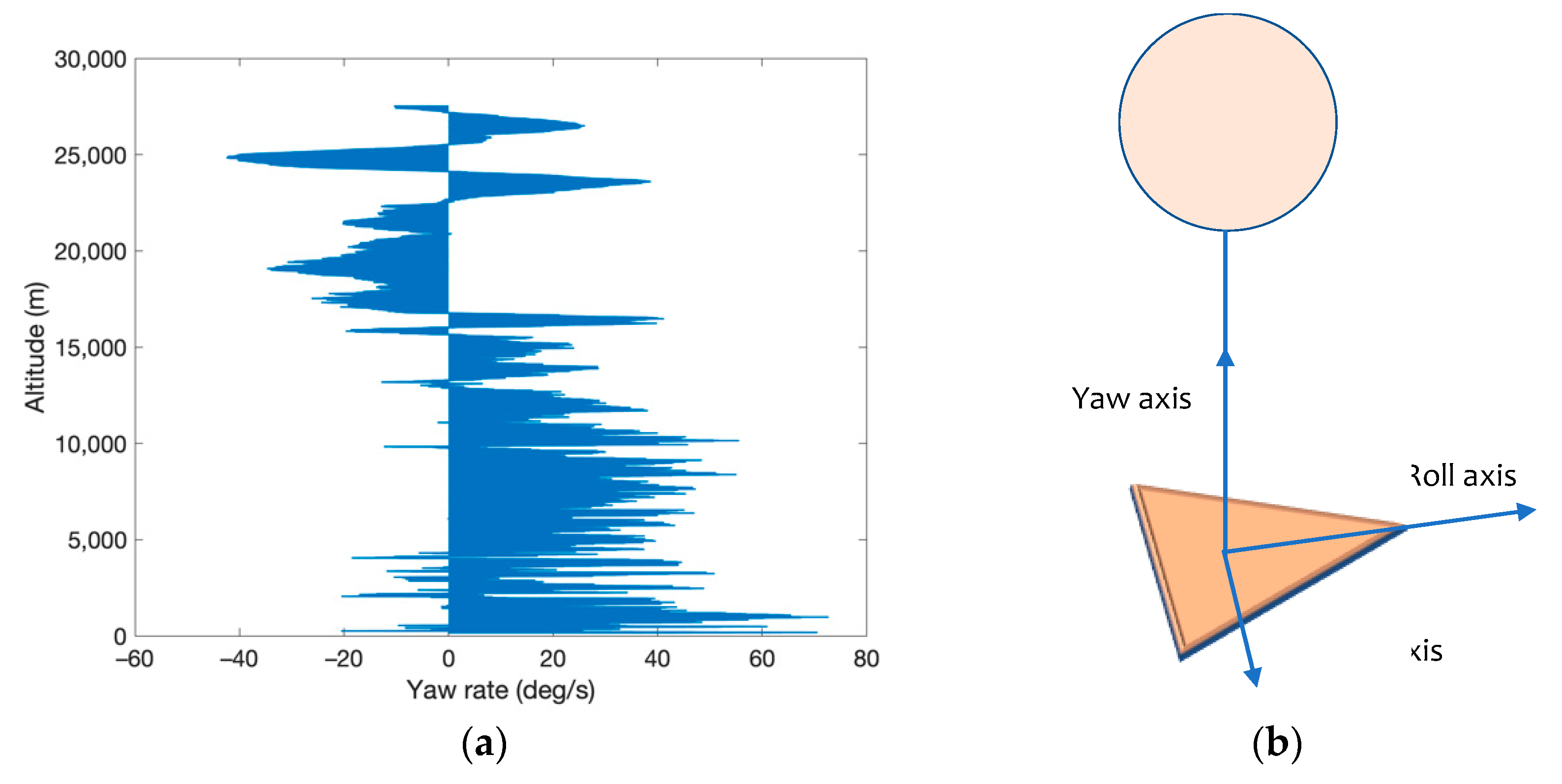
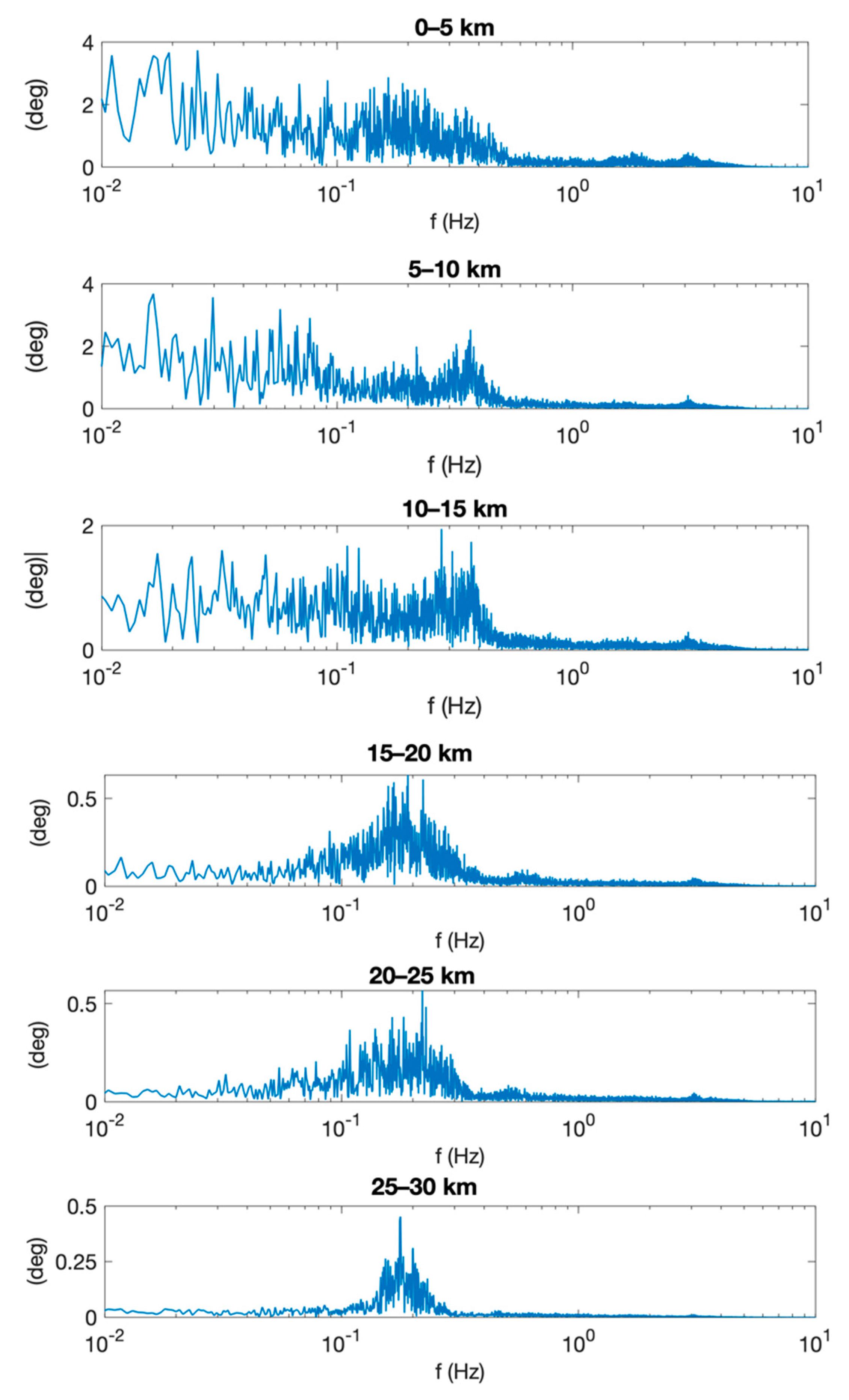
4.5. Dynamics: Acceleration, Spin, Oscillations
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Telecommunication Union. Radio Regulations; International Telecommunication Union: Geneva, Switzerland, 2016; Volume 1, p. 66. ISBN 978-92-61-19121-4. [Google Scholar]
- Centenaro, M.; Vangelista, L.; Zanella, A.; Zorzi, M. Long-range communications in unlicensed bands: The rising stars in the IoT and smart city scenarios. IEEE Wirel. Commun. 2016, 23, 60–67. [Google Scholar] [CrossRef] [Green Version]
- Sornin, N. LoRaWAN 1.1 Specification. Available online: https://lora-alliance.org/sites/default/files/2018-04/lorawantm_specification_-v1.1.pdf (accessed on 18 April 2020).
- What Is Sigfox? Available online: https://www.sigfox.com/en/what-sigfox/technology (accessed on 18 April 2020).
- Cassidy, M. Project Loon: GoogleX Lab’s Project to Bring Internet to the World via High Altitude Balloons. Presentation to the Space Technology Innovations Conference. 2014. Available online: https://livestream.com/internetsociety/spacetechnology/videos/40472692 (accessed on 18 April 2020).
- Lauridsen, M.; Vejlgaard, B.; Kovacs, I.Z.; Nguyen, H.; Mogensen, P. Interference Measurements in the European 868 MHz ISM Band with Focus on LoRa and SigFox. In Proceedings of the IEEE Wireless Communications and Networking Conference, San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Mamadou, A.M.; Toussaint, J.; Chalhoub, G. Interference Study of Coexisting IEEE 802.11 and 802.15.4 Networks. In Proceedings of the 8th International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks, Paris, France, 26–28 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Polak, L.; Milos, J. Performance analysis of LoRa in the 2.4 GHz ISM band: Coexistence issues with Wi-Fi. Telecommun. Syst. 2020. [Google Scholar] [CrossRef]
- Sandoval, R.M.; Garcia-Sanchez, A.-J.; Garcia-Sanchez, F.; Garcia-Haro, J. Evaluating the More Suitable ISM Frequency Band for IoT-Based Smart Grids: A Quantitative Study of 915 MHz vs. 2400 MHz. Sensors 2017, 17, 76. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eutelsat Commissions ELO, Its First Low Earth Orbit Satellite Designed for the Internet of Things. Available online: http://news.eutelsat.com/pressreleases/eutelsat-commissions-elo-its-first-low-earth-orbit-satellite-designed-for-the-internet-of-things-2440770 (accessed on 18 April 2020).
- Yajima, N.; Izutsu, N.; Imamura, T.; Abe, T. Scientific Ballooning, 1st ed.; Springer: New York, NY, USA, 2009; ISBN 978-0-387-09725-1. [Google Scholar] [CrossRef]
- Alexander, P.; de la Torre, A. Uncertainties in the measurement of the atmospheric velocity due to balloon-gondola pendulum-like motions. Adv. Space Res. 2011, 47, 736–739. [Google Scholar] [CrossRef]
- Aubin, F.; Bayman, B.; Hanany, S.; Franco, H.; Marsh, J.; Didier, J.; Miller, A.D. Torsional balloon flight line oscillations: Comparison of modelling to flight data. Adv. Space Res. 2017, 60, 702–708. [Google Scholar] [CrossRef] [Green Version]
- Safonova, M.; Nirmal, K.; Sreejith, A.G.; Satpodar, M.; Suresh, A.; Prakash, A.; Mathew, J.; Murthy, J.; Anand, D.; Kapardhi, B.V.N.; et al. Measurements of Gondola Motion on a Stratospheric Balloon Flight. Indian Institute of Astrophysics Report No. IIA-TRS-1616, Technical Report Series No. 16. 2016, pp. 1–9. Available online: https://arxiv.org/pdf/1607.06397.pdf (accessed on 18 April 2020).
- StratoGear, StratoTrack—Reliable Worldwide APRS Tracking: User Guide. Available online: https://www.stratogear.com/s/StratoTrack-User-Guide-V20.pdf (accessed on 20 April 2020).
- Globalstar: SPOT Trace. Available online: https://www.globalstar.com/en-gb/products/spot/spot-trace (accessed on 20 April 2020).
- High Altitude Science—Eagle Flight Computer. Available online: https://www.highaltitudescience.com/products/eagle-flight-computer (accessed on 20 April 2020).
- Ettus Research, USRP B200mini-i. Available online: https://www.ettus.com/all-products/usrp-b200mini-i-2/ (accessed on 20 April 2020).
- LSM9DS1—iNEMO Inertial Module: 3D Accelerometer, 3D Gyroscope, 3D Magnetometer. Available online: https://ozzmaker.com/wp-content/uploads/2017/11/LSM9DS1.pdf (accessed on 20 April 2020).
- Renegar, L.W. A Survey of Current Balloon Trajectory Prediction Technology. In Proceedings of the 2017 Academic High-Altitude Conference, University of Minnesota, Twin Cities, MN, USA, 27–28 October 2017; Available online: https://via.library.depaul.edu/ahac/2017/poster2/3/ (accessed on 18 April 2020).
- Fields, T.; Heninger, M.; LaCombe, J.; Wang, E. In-flight Landing Location Predictions using Ascent Wind Data for High Altitude Balloons. In Proceedings of the AIAA Balloon Systems Conference, Daytona Beach, FL, USA, 25–28 March 2013. [Google Scholar] [CrossRef] [Green Version]
- Farley, R.E. BalloonAscent: 3-D Simulation Tool for the Ascent and Float of High-Altitude Balloons. In Proceedings of the 5th ATIO and 16th Lighter-Than-Air Sys Tech. and Balloon Systems Conferences, Arlington, VA, USA, 26–28 September 2005. [Google Scholar] [CrossRef] [Green Version]
- Gallice, A.; Wienhold, F.G.; Hoyle, C.R.; Immler, F.; Peter, T. Modeling the ascent of sounding balloons: Derivation of the vertical air motion. Atmos. Meas. Tech. 2011, 4, 2235–2253. [Google Scholar] [CrossRef] [Green Version]
- Smith, T.P. Balloon Calculations. Available online: http://northstar-www.dartmouth.edu/~klynch/pmwiki-gc/uploads/BalloonCalulations.pdf (accessed on 18 April 2020).
- NOAA Air Resources Laboratory—Current & Forecast Meteorology. Available online: https://www.ready.noaa.gov/READYcmet.php (accessed on 18 April 2020).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | ISM-HAB #1 | ISM-HAB #2 | ISM-HAB #3 | ISM-HAB #4 | ISM-HAB #5 |
|---|---|---|---|---|---|
| Landing displacement with respect to prediction | 1.2 km | 5 km | 2.9 km | 8 km | 3 km |
| −14% | −6% | −10% | −6% | −4% |
| ISM-HAB#1 | ISM-HAB#2 | ISM-HAB#3 | ISM-HAB#4 | ISM-HAB#5 | |
|---|---|---|---|---|---|
| Mission | Test launch without RF payload | 2.4 GHz, signal acquisition at 1 MHz sampling rate | 2.4 GHz, signal acquisition at 1 MHz sampling rate | 868 MHz, signal acquisition at 100 kHz sampling rate | 2.4 GHz, signal acquisition at 100 kHz sampling rate + sample recording |
| Launch Time (Central European Time) | 13:05 | 15:30 | 12:38 | 11:32 | 12:32 |
| Launch site (City, District) | Lajatico (PI) | Montegonzi (AR) | Certaldo (FI) | Ponte a Elsa (FI) | Lajatico (PI) |
| Landing site (City, District) | Villamagna (PI) | Cecina (LI) | Monteguidi (SI) | Latera (VT) | Rapolano Terme (SI) |
| Landing site (type) | Woods | Woods | Woods | Grassland | Woods |
| Payload Recovered | Yes | Yes | Yes | Yes | Yes |
| Weather conditions | Cloudy | Rainy | Sunny | Sunny | Sunny |
| Peak Altitude (km) | 21.038 | 19.115 | 32.412 | 30.400 | 29.493 |
| Total Distance Covered (km) | 8.3 | 78.3 | 28.8 | 137 | 74 |
| Total Flight Time (min) | 118 | 123 | 210 | 236 | 176 |
| Ascent Time (min) | 91 | 93 | 152 | 185 | 114 |
| Descent Time (min) | 27 | 30 | 58 | 51 | 62 |
| Mean Ascent Velocity (m/s) | 3.9 | 3.4 | 3.7 | 2.7 | 4.3 |
| Mean Descent Velocity (m/s) | 13.0 | 10.5 | 9.2 | 9.7 | 7.9 |
| Landing Velocity (m/s) | 9.9 | 6 | 5.3 | 3.4 | 3.4 |
| Payload Recovered | Yes | Yes | Yes | Yes | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gemignani, M.; Marcuccio, S. Dynamic Characterization of a High-Altitude Balloon during a Flight Campaign for the Detection of ISM Radio Background in the Stratosphere. Aerospace 2021, 8, 21. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010021
Gemignani M, Marcuccio S. Dynamic Characterization of a High-Altitude Balloon during a Flight Campaign for the Detection of ISM Radio Background in the Stratosphere. Aerospace. 2021; 8(1):21. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010021
Chicago/Turabian StyleGemignani, Matteo, and Salvo Marcuccio. 2021. "Dynamic Characterization of a High-Altitude Balloon during a Flight Campaign for the Detection of ISM Radio Background in the Stratosphere" Aerospace 8, no. 1: 21. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010021