Teachers’ Perspectives on the Intertwining of Tangible and Digital Modes of Activity with a Drawing Robot for Geometry



Abstract
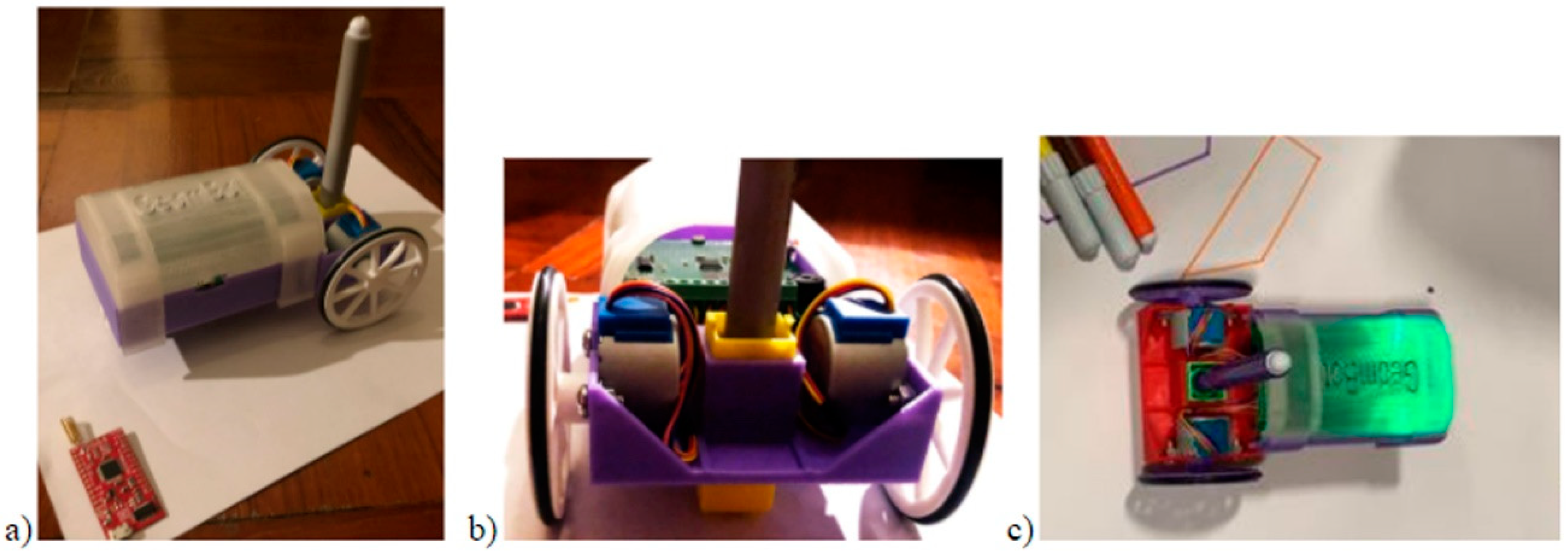
:1. Introduction: The GeomBot as an Artifact for the Teaching and Learning of Geometry
2. Empirical Background and Theoretical Foundation
2.1. Empirical Background
2.2. Theoretical Foundation and Research Question
2.2.1. Theory of Objectification and Sensuous Cognition
- Activity refers to the individual and social agency towards shared goals, significant problems, operations, labor etc.
- Reflexivity refers to the dialectical movement of the individual consciousness between his personal thinking, interpretations, emotions and feelings, perceptions and cultural-historical, marked by symbolic superstructures—in the terminology of the Theory of Objectification, Semiotic Systems of Cultural Signification [3]—that include systems of beliefs, systems of truth, forms of rationality, methods of inquiry, acceptable forms of knowledge, social rules, epistemology and ontology of mathematics etc. [3].
- Mediation refers to the role of artifacts in carrying out the praxis cogitans. In a Vygotskian sense, they are constitutive and consubstantial to thinking since they allow us to carry out activity. They are not mere aids to thinking but they shape the socio-cultural space, the Territory of Artifactual Thought [3] in which cognition occurs. They include a wide arsenal of semiotic resources ranging from material objects, gestures and bodily movements to icons, diagrams, natural language and symbolic language. The territory of Artifactual Thought molds the way we act according to the cultural and historical meanings they condense and are endowed with.
- Factual generalization—characterized by perception, feelings, movement, spatial and temporal elements of the students’ physical environment—is accounted for mainly by gestures, bodily movements, material objects and deictic and generative use of natural language.
- Contextual generalization intertwines material perception, movement and feelings with a new perceptual field in which emergent objects are detached from mediated sensory perception. Students start introducing more ideal semiotic means of objectification, such as new linguistic terms, natural language and the first elements of symbolic language.
- In symbolic generalizations, perception is no longer embedded or related to a concrete space-time context but in a new abstract and relational “space” where mathematical activity is carried out mainly by symbolic language.
2.2.2. Teachers’ Action Research as a Process of Subjectification
- mathematical knowledge: geometry
- language and languages: multimodality and semiotic resources
- accepted teaching practices, problems and situations
- conception of the student: affection, modes of learning
- forms of rationality: sensuous cognition
- social interaction
- ethics
- the role of technology in mathematical thinking and learning:
2.2.3. Research Question
3. Material and Methods
3.1. Partecipants
3.2. Design of the Study
3.3. Materials
3.4. Implementation of the Action Research around the GeomBot
- (1)
- a whole-group session that was carried out once a month at the University;
- (2)
- the implementations of the activities, that teachers conducted autonomously with their selected classes between two consecutive monthly sessions;
- (3)
- a conclusive whole-group session that was conducted by the first author. We now describe these three situations.
3.4.1. The Monthly Group Sessions
3.4.2. The Experimental Phase between Two Consecutive Monthly Sessions
3.4.3. The Conclusive Whole-Group Session
3.5. Data Collected
- Materials prepared and used by the teachers to present their experience to the rest of the group (slides, photos and short videos). These materials provide information both on what happened in the classes and on what the teachers considered meaningful to report and share with the rest of the group.
- The notes and the recordings collected during the discussions in the monthly sessions. These documents provide information on thoughts, questions and proposals triggered by the reports of colleagues about the implemented activities.
- The emails exchanged between teachers and the researcher. These communications provide information on the teachers’ questions, doubts and fears when they were preparing the implementation of a certain activity in the classroom.
- The email descriptions and mutual requests for support of the activities, exchanged among the teachers during the experimental intermediate phases. These descriptions provide information on the collaboration modalities carried out between the teachers with common interests when they were preparing to face the implementation of certain activities in their classrooms.
- The notes and the recordings collected during the conclusive session. These documents allow us to explore in depth and to better characterize the teachers’ perspective regarding the notion of “angle”—which was revealed to be a recurring theme among the whole action research experience for each of the nine teachers involved.
4. Results
4.1. Feature 1 (Aspects B, E). Positioning with Respect to Forms of Rationality and Language and Languages: Sensuous Cognition and the Use of Ideal and Material Semiotic Resources
4.2. Feature 2 (Aspect C). Positioning with Respect to Accepted Teaching Practices, Problems and Situations: Solving Real-Life Problems
4.3. Feature 3 (Aspect A). Positioning with Respect to Mathematical Knowledge: Ease in Engaging with the Specific Geometry at Stake
4.4. Feature 4 (Aspect D). Positioning with Respect to the Conception of the Student: Affective Dimension for Teachers and Students
4.5. Feature 5 (Aspects E, F). Positioning with Respect to Social Interaction and Forms of Rationality: Shared Reflexive Activity and Developing the Geometrical Eye
4.6. Feature 6 (Aspect G). Positioning with Respect to Ethical Issues: The GeomBot’s Inclusive Nature
4.7. Feature 7 (Aspect H). Positioning with Respect to the Role of Technology
4.8. Answer to the Research Question
5. Discussion
6. Limitations and Directions for Future Research
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bartolini Bussi, M.G.; Mariotti, M.A. Semiotic mediation in the mathematics classroom. In Handbook of International Research in Mathematics Education, 2nd ed.; English, L., Kirshner, D., Eds.; Routledge: New York, NY, USA, 2008; pp. 746–783. [Google Scholar]
- Arzarello, F. Semiosis as a multimodal process. Rev. Lat. Am. Investig. Mat. Educ. 2006, 9, 267–299. [Google Scholar]
- Radford, L. The ethics of being and knowing: Towards a cultural theory of learning. In Semiotics in Mathematics Education: Epistemology, History, Classroom, and Culture; Radford, L., Schubring, G., Seeger, F., Eds.; Sense Publishers: Rotterdam, The Netherlands, 2008; pp. 215–234. [Google Scholar]
- Radford, L.; Arzarello, F.; Edwards, L.; Sabena, C. The multimodal material mind. In First Compendium for Research in Mathematics Education; Cai, J., Ed.; NCTM: Reston, VA, USA, 2017; pp. 700–721. [Google Scholar]
- Calmet, C.; Hirtzig, M.; Wilgenbus, D. 1,2,3...Codez! Enseigner L’informatique à L’école et au Collège; Editions Le Pommier: Paris, France, 2016. [Google Scholar]
- Papert, S. Teaching Children Thinking. J. Struct. Learn. 1975, 4, 219–230. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books: New York, NY, USA, 1980. [Google Scholar]
- Clements, D.H. Longitudinal Study of the Effects of Logo Programming on Cognitive Abilities and Achievement. J. Educ. Comput. Res. 1987, 3, 73–94. [Google Scholar] [CrossRef]
- Hoyles, C.; Sutherland, R. Logo Mathematics in the Classroom; Routledge: London, UK, 1989. [Google Scholar]
- Hoyles, C.; Healy, L.; Sutherland, R. Patterns of discussion between pupil pairs in computer and non-computer environments. J. Comput. Assist. Learn. 1991, 7, 210–228. [Google Scholar] [CrossRef]
- Hoyles, C.; Noss, R. Learning Mathematics and Logo; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Clements, D.H.; Meredith, J.S. Turtle Math; Logo Computer Systems: Montreal, QC, Canada, 1994. [Google Scholar]
- Noss, R.; Hoyles, C. Windows on Mathematical Meanings; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1996. [Google Scholar]
- Clements, D.H.; Battista, M.T.; Sarama, J. Logo and Geometry. J. Res. Math. Educ. Monogr. Ser. 2001, 10. [Google Scholar] [CrossRef]
- Atkinson, B. Learning disabled students and Logo. J. Learn. Disabil. 1984, 17, 500–501. [Google Scholar] [CrossRef] [PubMed]
- Michayluk, J.O.; Saklofske, D.H. Logo and special education. Can. J. Spec. Educ. 1988, 4, 43–48. [Google Scholar]
- Highfield, K.; Mulligan, J.T. Young children’s embodied action in problem-solving tasks using robotic toys. In Proceedings of the 33rd conference of the International Group for the Psychology of Mathematics Education, Thessaloniki, Greece, 19–24 July 2009; Tzekaki, M., Kaldrimidou, M., Sakonidis, H., Eds.; PME: Thessaloniki, Greece, 2009; Volume 2, pp. 273–280. [Google Scholar]
- Highfield, K. Robotic toys as a catalyst for mathematical problem solving. Aust. Prim. Math. Classr. 2010, 15, 22–27. [Google Scholar]
- Sinclair, N.; Baccaglini-Frank, A. Digital technologies in the early primary school classroom. In Handbook of International Research in Mathematics Education, 3rd ed.; English, L., Kirshner, D., Eds.; Taylor Francis; Routledge: New York, NY, USA, 2016; pp. 662–686. [Google Scholar]
- Ronsivalle, G.B.; Boldi, A.; Gusella, V.; Inama, C.; Carta, S. How to implement educational robotics’ programs in Italian schools: A brief guideline according to an instructional design point of view. Technol. Knowl. Learn. 2019, 24, 227–245. [Google Scholar] [CrossRef]
- Bartolini Bussi, M.G.; Baccaglini-Frank, A. Geometry in early years: Sowing the seeds towards a mathematical definition of squares and rectangles. ZDM Math. Educ. 2015, 47, 391–405. [Google Scholar] [CrossRef] [Green Version]
- Bartolini Bussi, M.G.; Baccaglini-Frank, A. Using pivot signs to reach an inclusive definition of squares and rectangles. In Proceedings of the 9th Congress of European Research in Mathematics Education (CERME 9); Krainer, K., Vondrová, N., Eds.; Charles University in Prague, Faculty of Education: Prague, Czech Republic, 2016; pp. 1891–1897. [Google Scholar]
- Benton, L.; Hoyles, C.; Kalas, I.; Noss, R. Bridging Primary Programming and Mathematics: Some Findings of Design Research in England. Dig. Exp. Math. Educ. 2017, 3, 115–138. [Google Scholar] [CrossRef] [Green Version]
- Cunningham, C.H. No, Engineering Isn’t Just about Job Creation. Educ. Week Spotlight 2019, 7. Available online: https://www.edweek.org/ew/articles/2019/02/20/no-engineering-isnt-just-about-job-creation.html (accessed on 20 May 2019).
- Corradini, I.; Lodi, M.; Nardelli, E. An investigation of Italian primary school teachers’ view on coding and programming. In International Conference on Informatics in Schools: Situation, Evolution, and Perspectives; Pozdniakov, S.N., Dagienė, V., Eds.; Springer: Cham, Switzerland, 2018; pp. 228–243. [Google Scholar]
- Reich-Stiebert, N.; Eyssel, F. Robots in the classroom: What teachers think about teaching and learning with education robots. In International Conference on Social Robotics; Agah, A., Cabibihan, J.-J., Howard, A.M., Salichs, M.A., He, H., Eds.; Springer: Cham, Switzerland, 2016; pp. 671–680. [Google Scholar]
- Khanlari, A. Teachers’ perceptions of the benefits and the challenges of integrating educational robots into primary/elementary curricula. Eur. J. Eng. Educ. 2016, 41, 320–330. [Google Scholar] [CrossRef]
- Leont’ev, A.N. Activity, Consciousness and Personality; Prentice Hall: Englewood Cliffs, NJ, USA, 1978. [Google Scholar]
- Leont’ev, A.N. Problems of the Development of the Mind; Progress: Moscow, Russia, 1981. [Google Scholar]
- Radford, L. Gestures, Speech and the Sprouting of Signs: A Semiotic-Cultural Approach to students’ Types of Generalization. Math. Think. Learn. 2003, 5, 37–70. [Google Scholar] [CrossRef]
- Radford, L. Towards an embodied, cultural, and material conception of mathematics cognition. ZDM 2014, 46, 349–361. [Google Scholar] [CrossRef]
- Radford, L. Sensed objects, sensing subjects: Embodiment from a dialectical materialist perspective. In The Body in Mathematics; Edwards, L., Krause, C., Eds.; Sense/Brill: Rotterdam, The Netherlands, in press.
- Ferretti, F.; Gambini, A.; Santi, G. The Gestinv Database: A Tool for Enhancing Teachers Professional Development within a Community of Inquiry. In Proceedings of the Twenty-fifth ICMI Study School Teachers of Mathematics Working and Learning in Collaborative Groups; Borko, H., Potari, D., Eds.; University of Lisbon: Lisbon, Portugal, 2020; pp. 621–628. [Google Scholar]
- Wenger, E. Communities of Practice: Learning, Meaning, and Identity; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Radford, L. Play and the production of subjectivities in preschool. In Mathematics education in the early years. Results from the POEM4 conference 2018; Carlsen, M., Erfjord, I., Hundeland, P.S., Eds.; Springer: Cham, Switzerland, 2020; pp. 43–60. [Google Scholar]
- Cohen, L.; Manion, L.; Morrison, K. Research Methods in Education; Routledge: London, UK, 2007. [Google Scholar]
- Baccaglini-Frank, A.; Di Martino, P.; Sinclair, N. Elementary school teachers’ implementation of dynamic geometry using model lesson videos. In Proceedings of the 42nd Conference of the International Group for the Psychology of Mathematics Education; Bergqvist, E., Österholm, M., Granberg, C., Sumpter, L., Eds.; PME: Umeå, Sweden, 2018; Volume 2, pp. 99–106. [Google Scholar]
- Arzarello, A.; Bazzini, L.; Chiappini, G. A model for analyzing algebraic process of thinking. In Perspectives on School Algebra; Sutherland, R., Rojano, T., Bell, A., Eds.; Kluwer Academic Publisher: Dordrecht, The Netherlands, 2001; pp. 61–82. [Google Scholar]
- Sfard, A.; Linchevski, L. The Gains and the Pitfalls of Reification: The Case of Algebra. Educ. Stud. Math. 1994, 26, 191–228. [Google Scholar] [CrossRef]
- Duncker, K.; Lees, L. On problem solving. Psychol. Monogr. 1945, 58, 1–113. [Google Scholar] [CrossRef]
- Smith, C.P.; King, B.; Hoyte, J. Learning angles through movement: Critical actions for developing understanding in an embodied activity. J. Math. Behav. 2014, 36, 95–108. [Google Scholar] [CrossRef]
- Turkle, S.; Papert, S. Different ways people think: Epistemological pluralism and the revaluation of the concrete. J. Math. Behav. 1991, 11, 3–33. [Google Scholar]
- Baccaglini-Frank, A.; Antonini, S.; Robotti, E.; Santi, G. Juggling reference frames in the microworld Mak-Trace: The case of a student with MLD. In Proceedings of the Joint Meeting of PME 38 and PME-NA 36; Nicol, C., Liljedahl, P., Oesterle, S., Allan, D., Eds.; PME: Vancouver, BC, Canada, 2014; Volume 2, pp. 81–88. [Google Scholar]
- Daniela, L.; Lytras, M.D. Educational robotics for inclusive education. Technol. Knowl. Learn. 2019, 24, 219–225. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
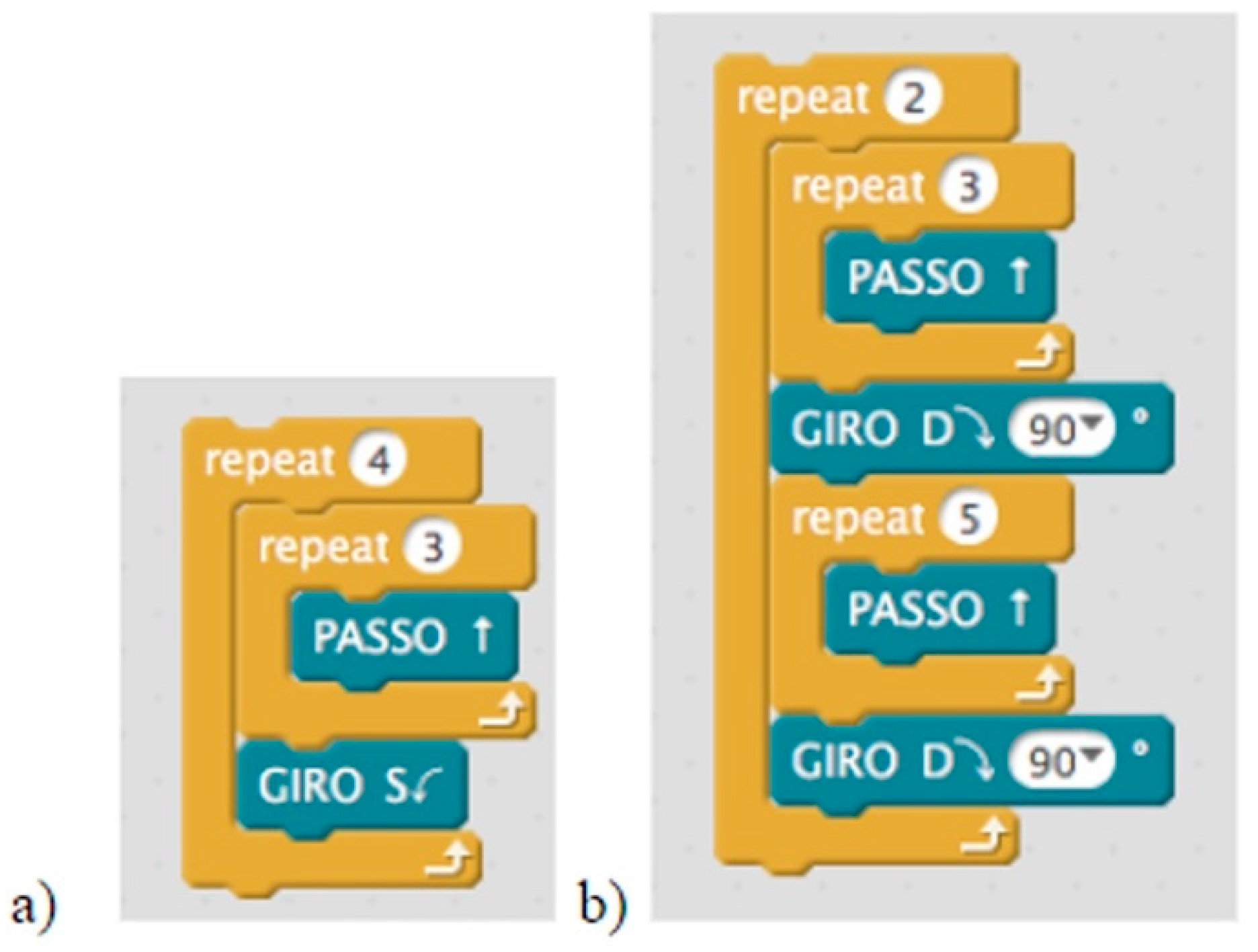
| Blocks | Command | What the GeomBot Does |
|---|---|---|
 | step forward | moves 15 cm forward, flashes both LEDs green |
 | step backward | moves 15 cm backward, flashes both LEDs red |
 | 90° turn counterclockwise | rotates 90° counterclockwise around the pen, flashes left LED blue |
 | 90° turn clockwise | rotates 90° clockwise around the pen, flashes right LED blue |
| Blocks | What the GeomBot Does |
|---|---|
 | moves forward any number of cm (input from dropdown menu or manual) |
 | moves backward any number of cm |
 | rotates counterclockwise around the pen any number of degrees |
 | rotates clockwise around the pen any number of degrees |
 | moves forward or backward (1st parameter) any number of cm (2nd parameter) |
 | rotates clockwise or counterclockwise (1st parameter) around the pen any number of degrees (2nd parameter) |
 | rotates counterclockwise around left wheel any number of degrees (there are 3 other PIVOT commands: the 4 commands allow rotations in both directions and around either wheel) |
 | moves along an arc clockwise or counterclockwise (1st parameter) of any number of degrees (2nd parameter) and any radius (3rd parameter) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baccaglini-Frank, A.E.; Santi, G.; Del Zozzo, A.; Frank, E. Teachers’ Perspectives on the Intertwining of Tangible and Digital Modes of Activity with a Drawing Robot for Geometry. Educ. Sci. 2020, 10, 387. https://0-doi-org.brum.beds.ac.uk/10.3390/educsci10120387
Baccaglini-Frank AE, Santi G, Del Zozzo A, Frank E. Teachers’ Perspectives on the Intertwining of Tangible and Digital Modes of Activity with a Drawing Robot for Geometry. Education Sciences. 2020; 10(12):387. https://0-doi-org.brum.beds.ac.uk/10.3390/educsci10120387
Chicago/Turabian StyleBaccaglini-Frank, Anna E., George Santi, Agnese Del Zozzo, and Eric Frank. 2020. "Teachers’ Perspectives on the Intertwining of Tangible and Digital Modes of Activity with a Drawing Robot for Geometry" Education Sciences 10, no. 12: 387. https://0-doi-org.brum.beds.ac.uk/10.3390/educsci10120387