
A High-Precision Surrogate Modeling Method Based on Parallel Multipoint Expected Improvement Point Infill Criteria for Complex Simulation Problems


Abstract
:1. Introduction
2. Kriging Model of Point Infill Criterion
2.1. Kriging Model
2.2. Expected Improvement Point Infill Criteria (EI)
2.3. Improved Expected Improvement Point Infill Criteria (IEI)
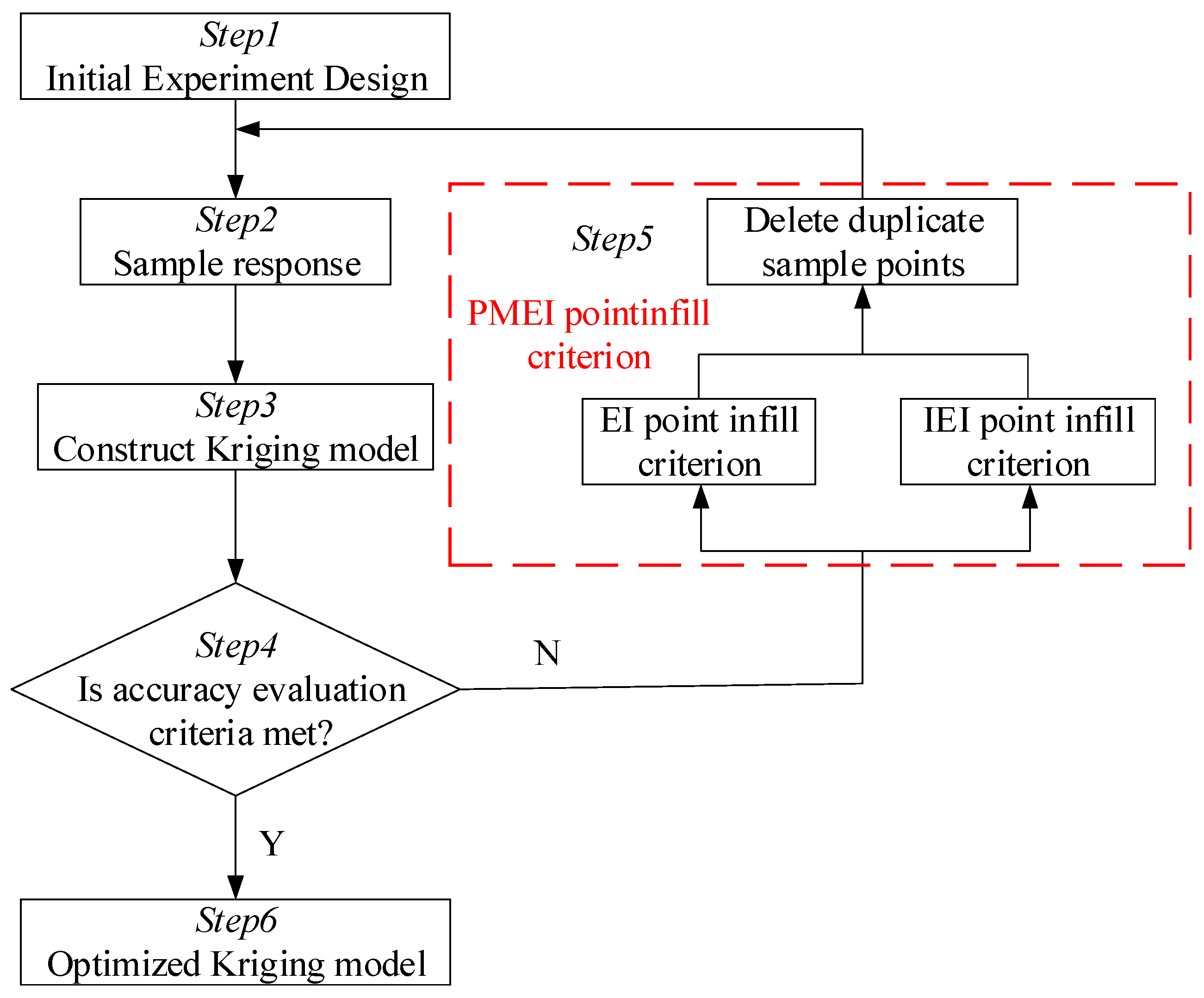
2.4. Parallel Multipoint Expected Improvement Point Infill Criteria (PMEI)
3. Numerical Tests for The PMEI Method
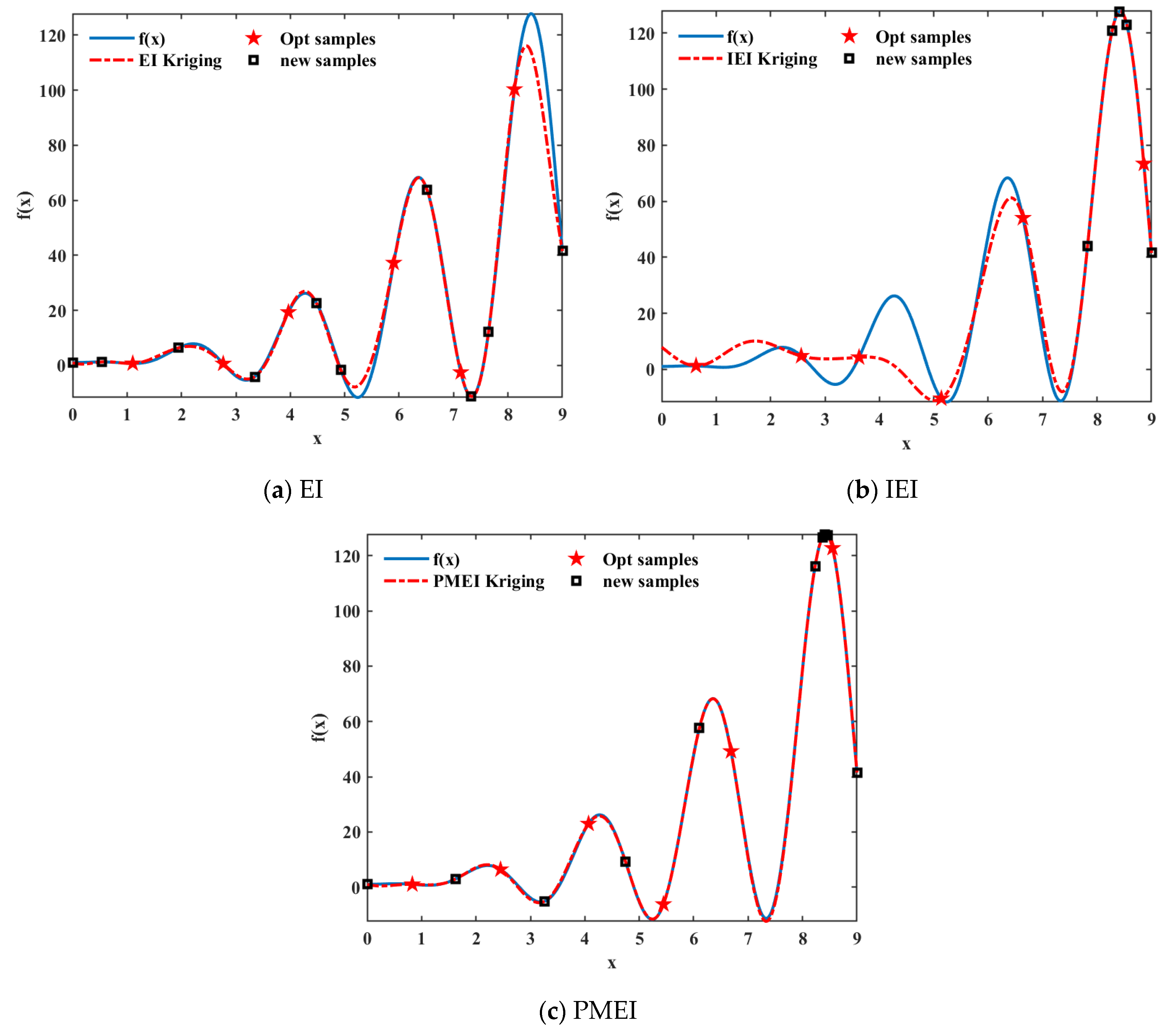
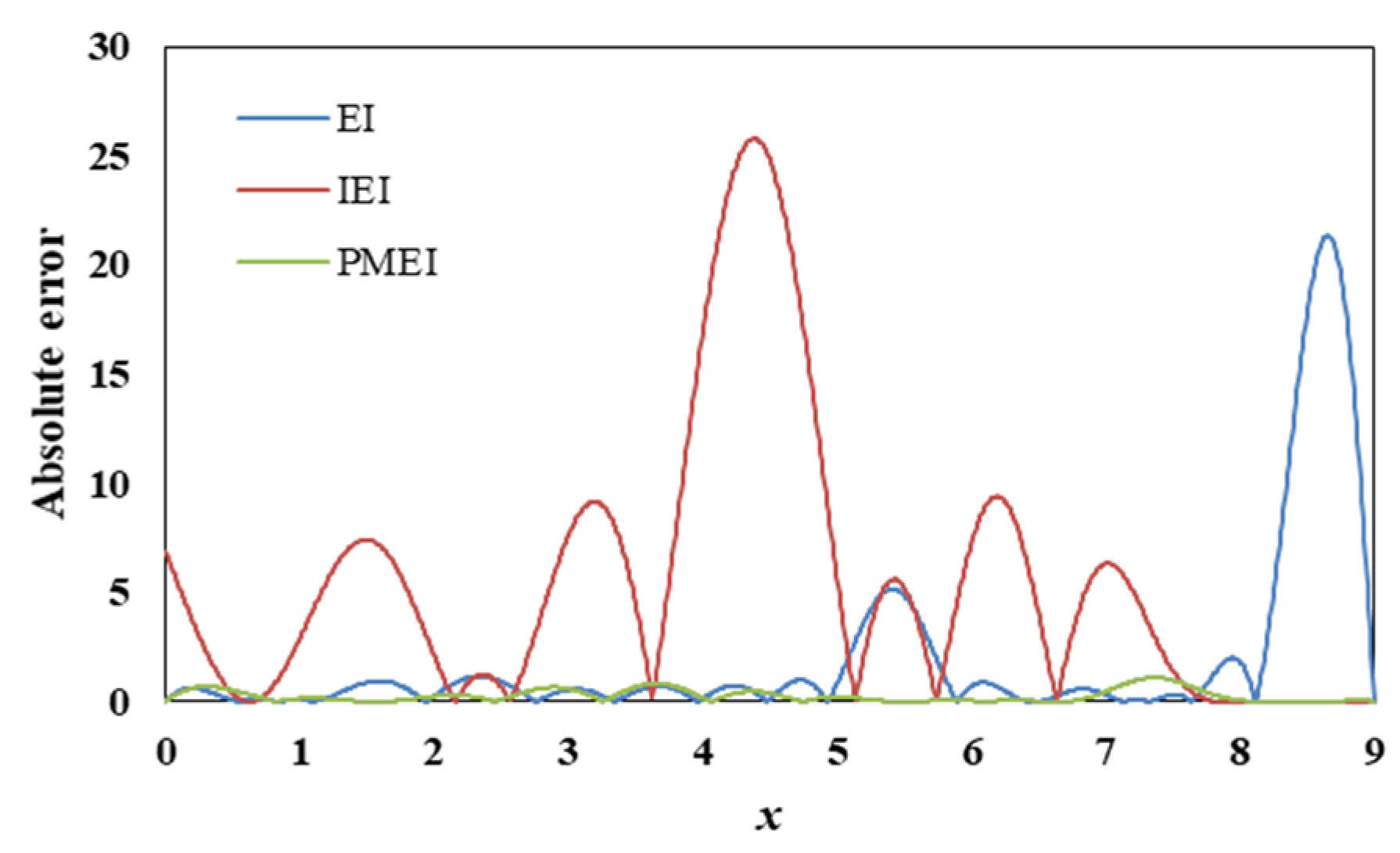
3.1. One-Dimensional Function Example
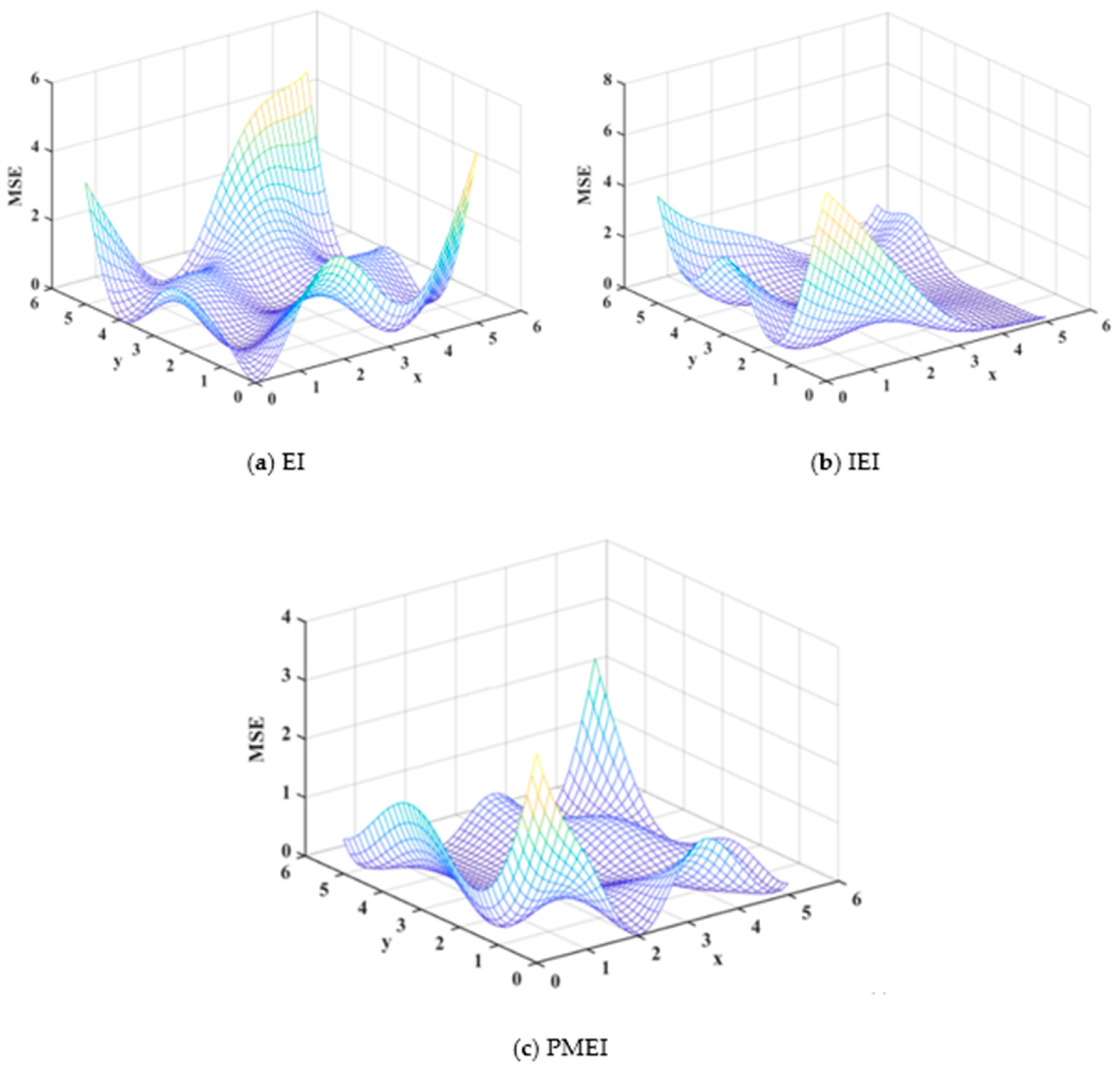
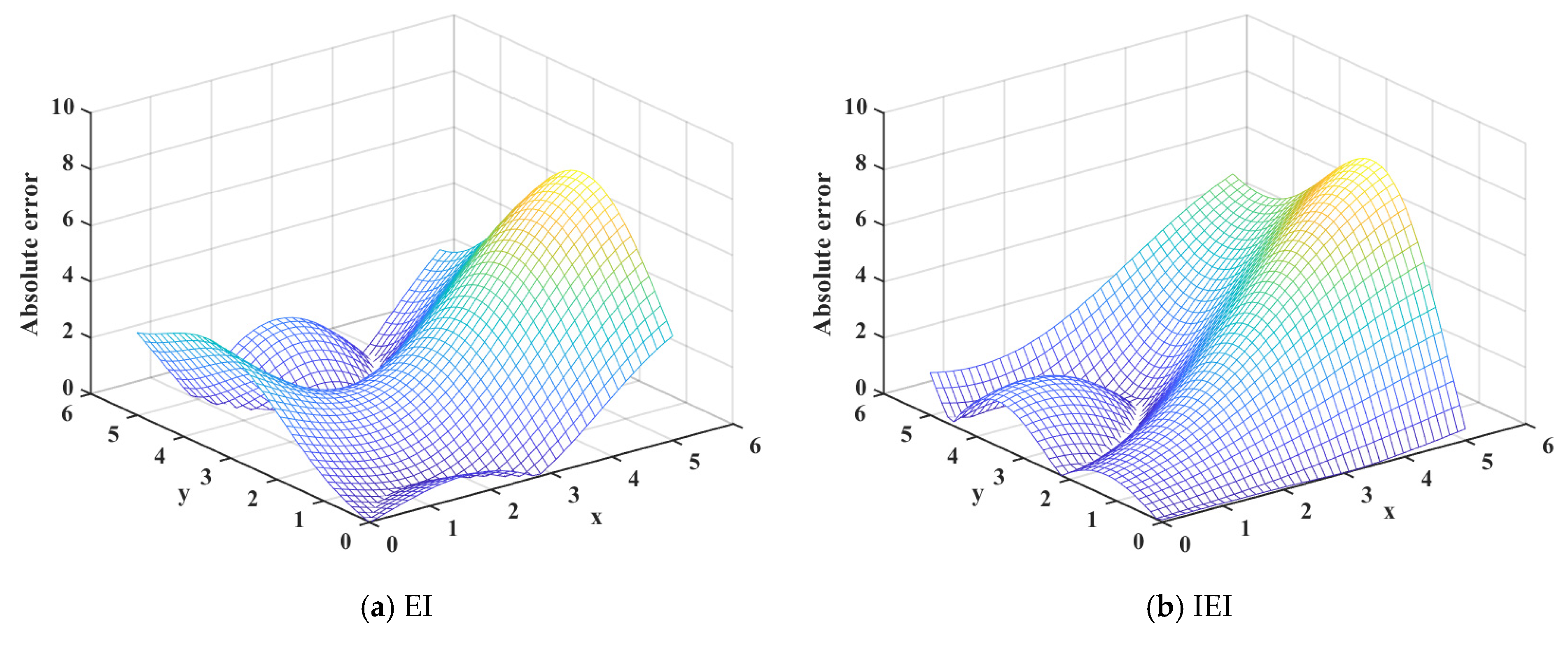
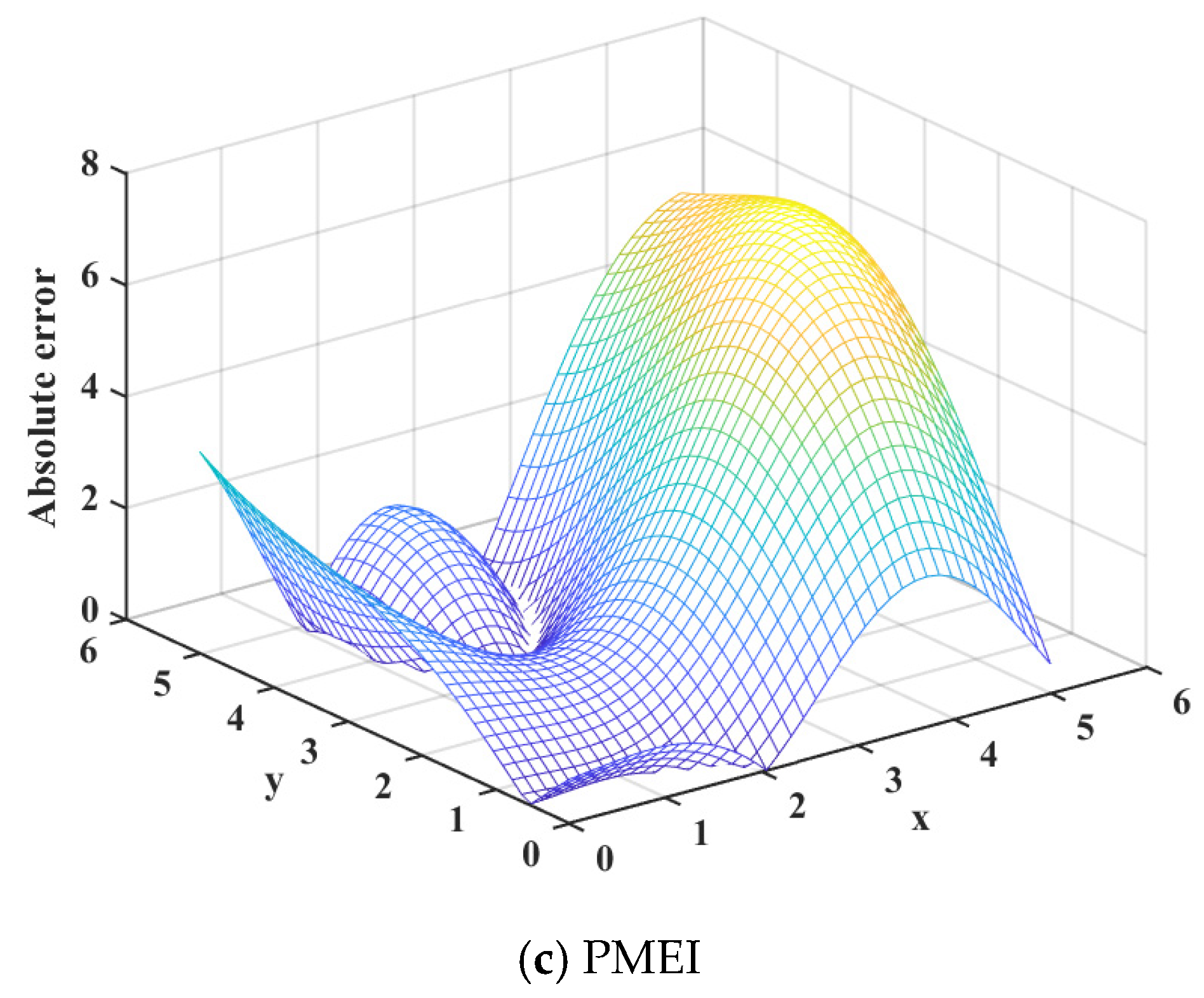
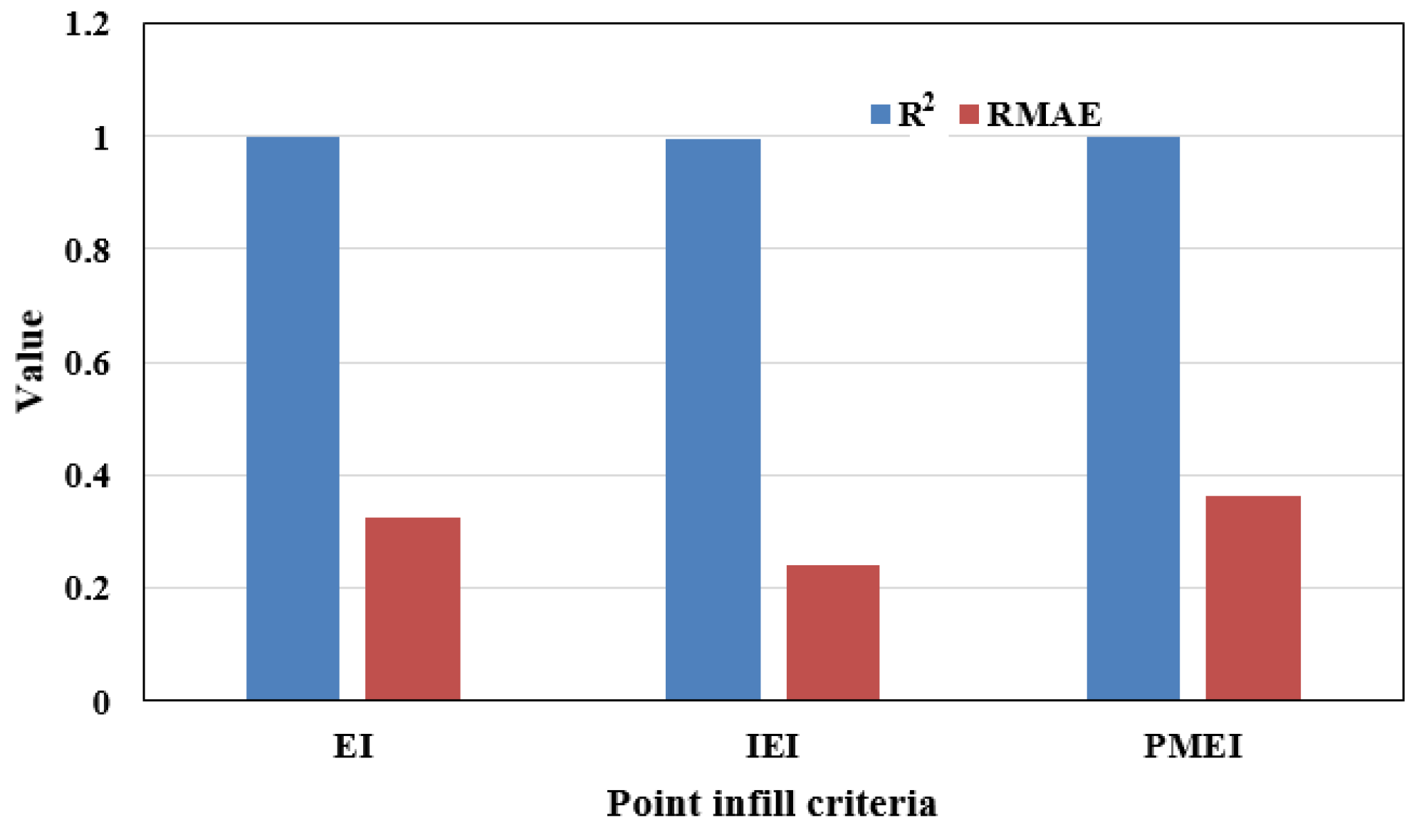
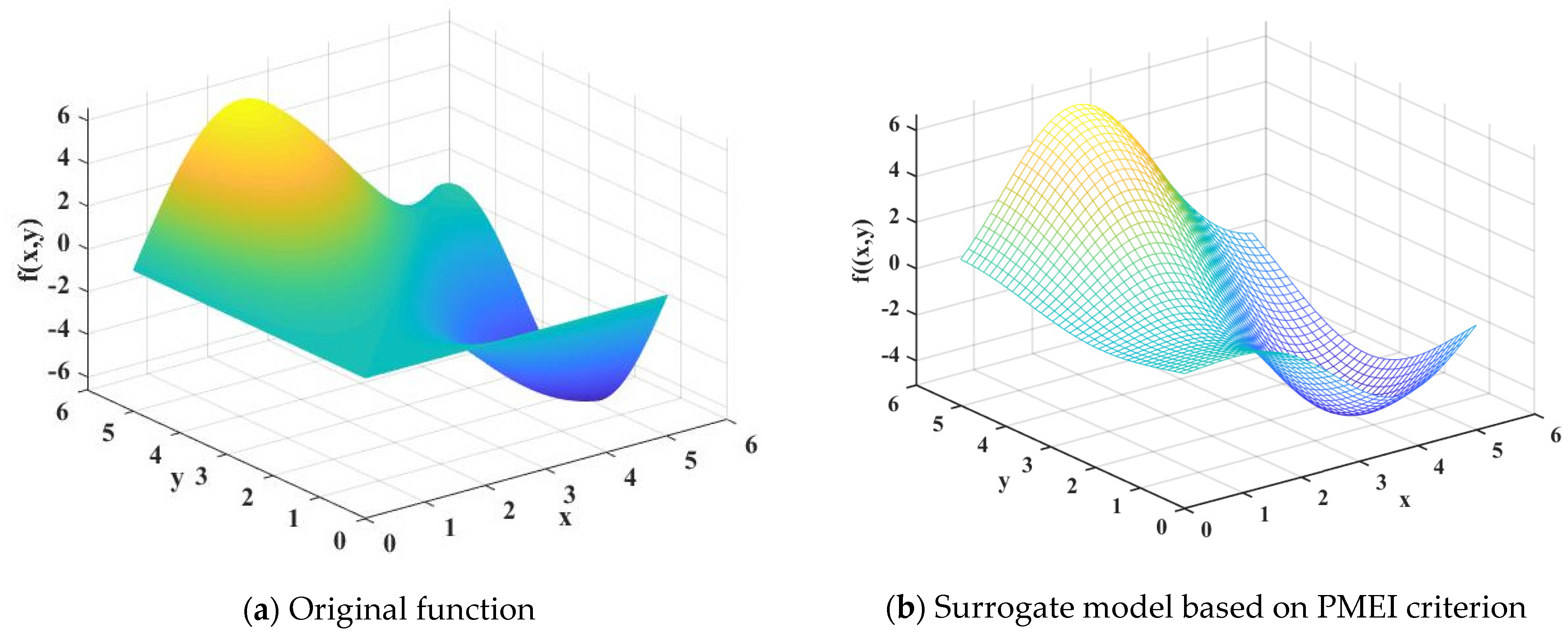
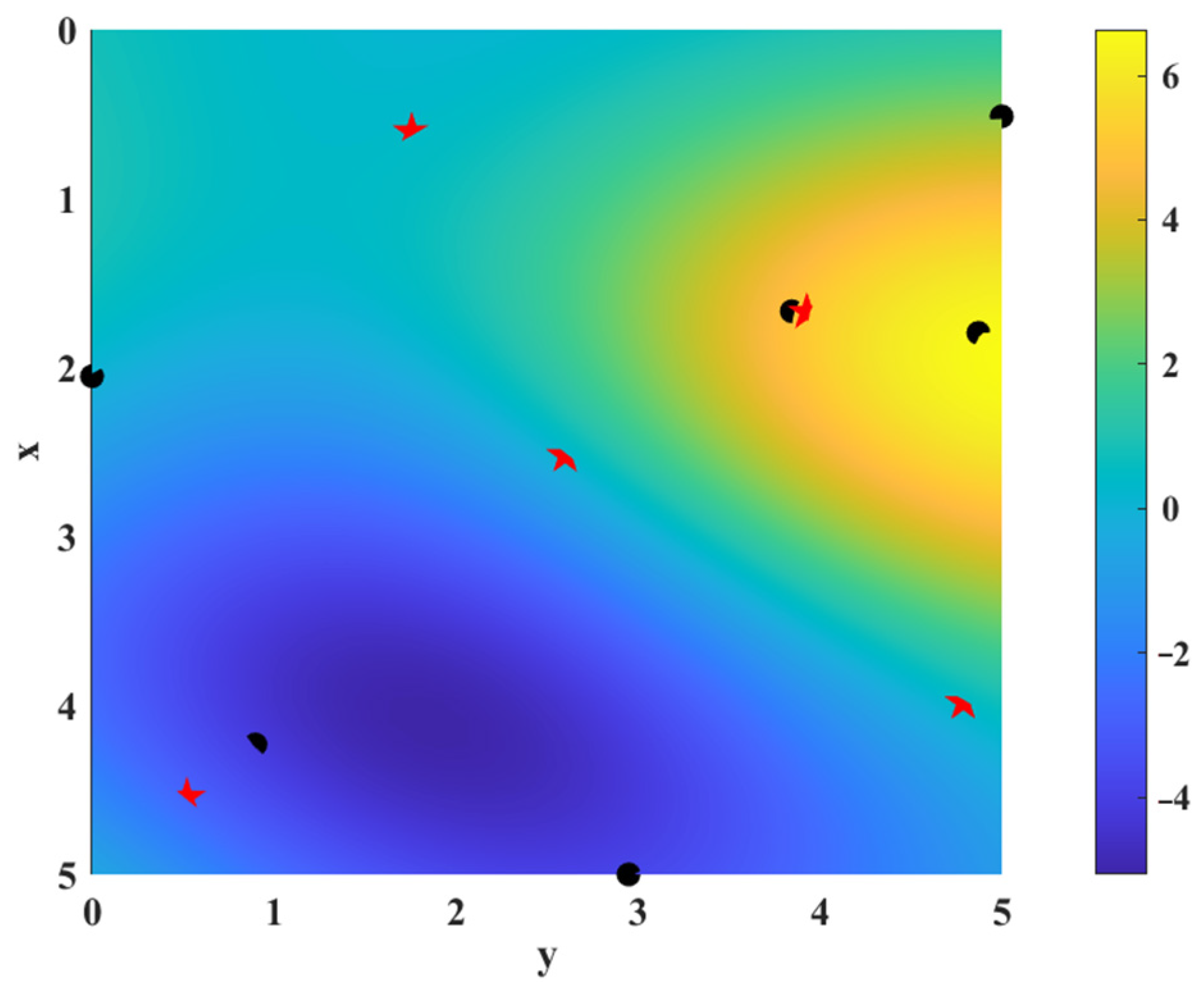
3.2. Two-Dimensional Function Example
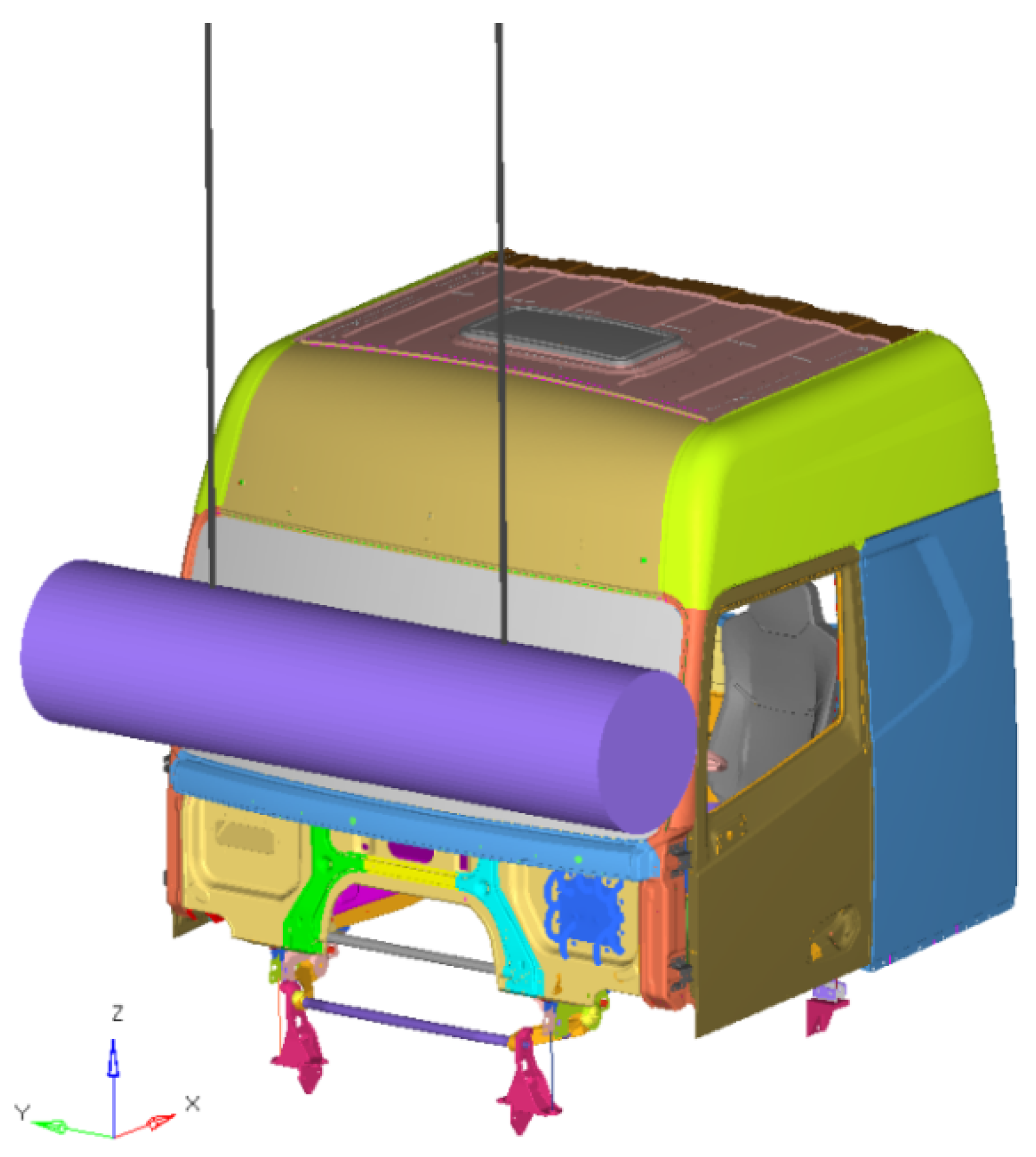
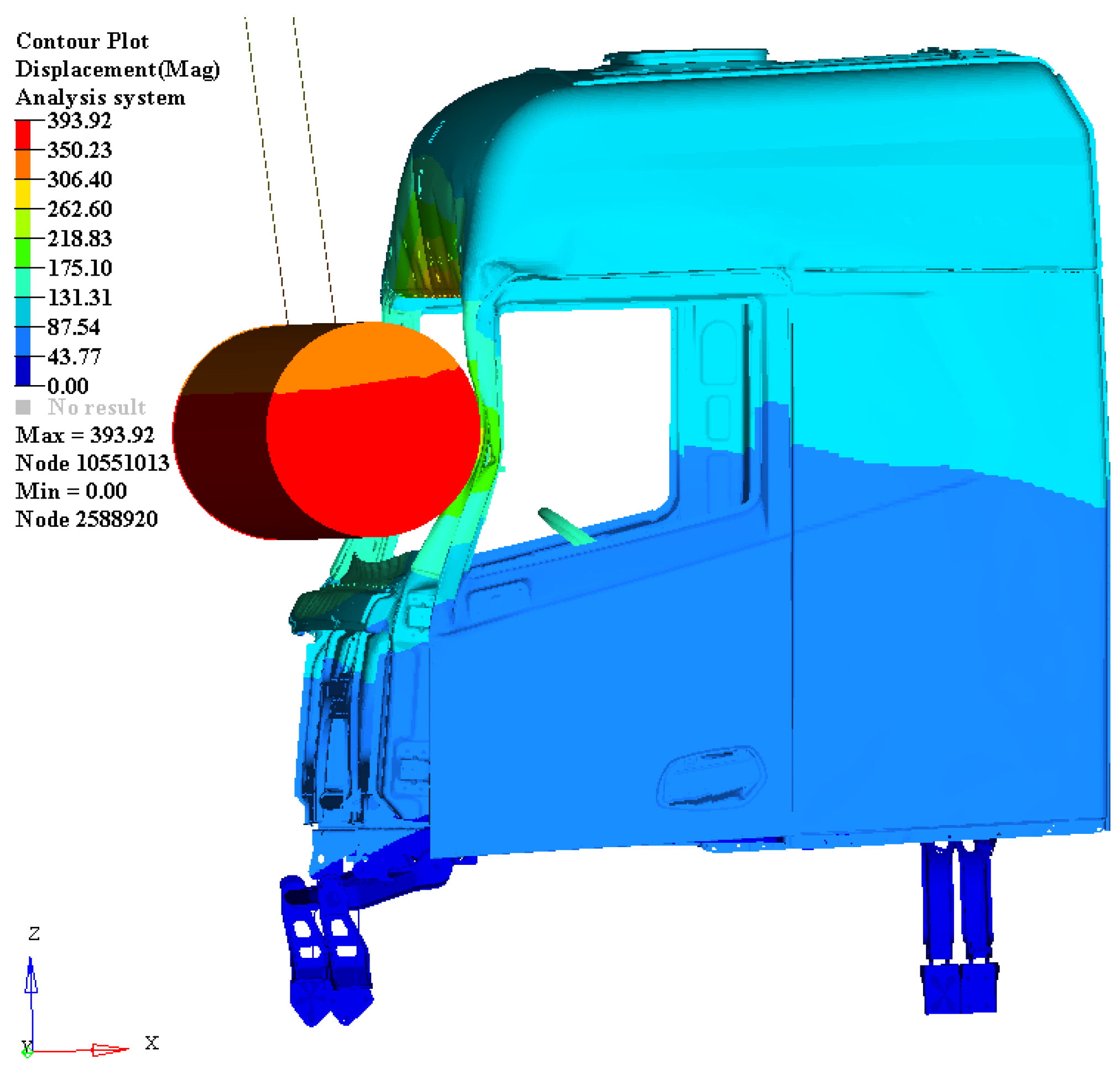
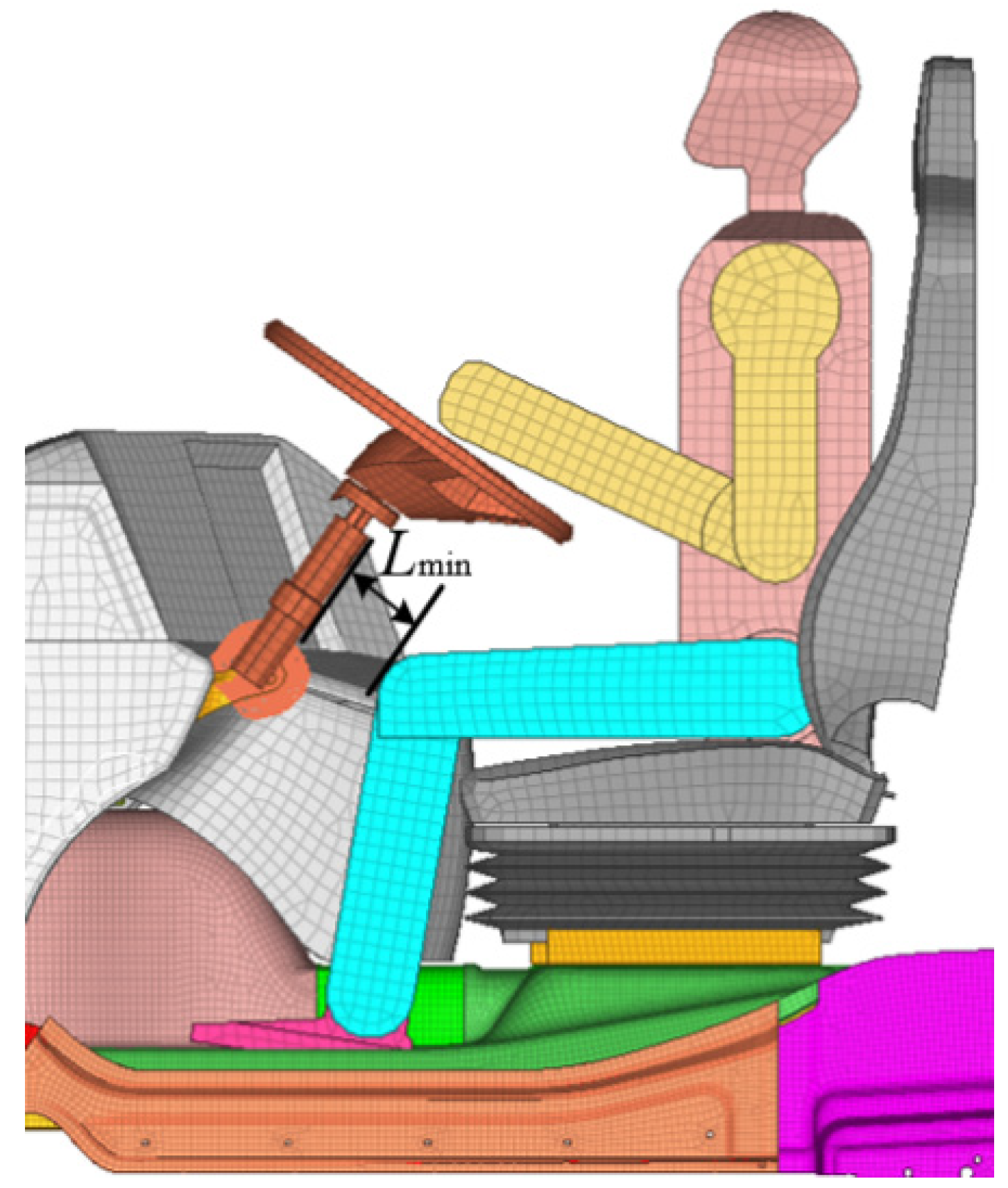
4. Kriging Surrogate Model of a Truck Cab
4.1. Construction of Surrogate Model
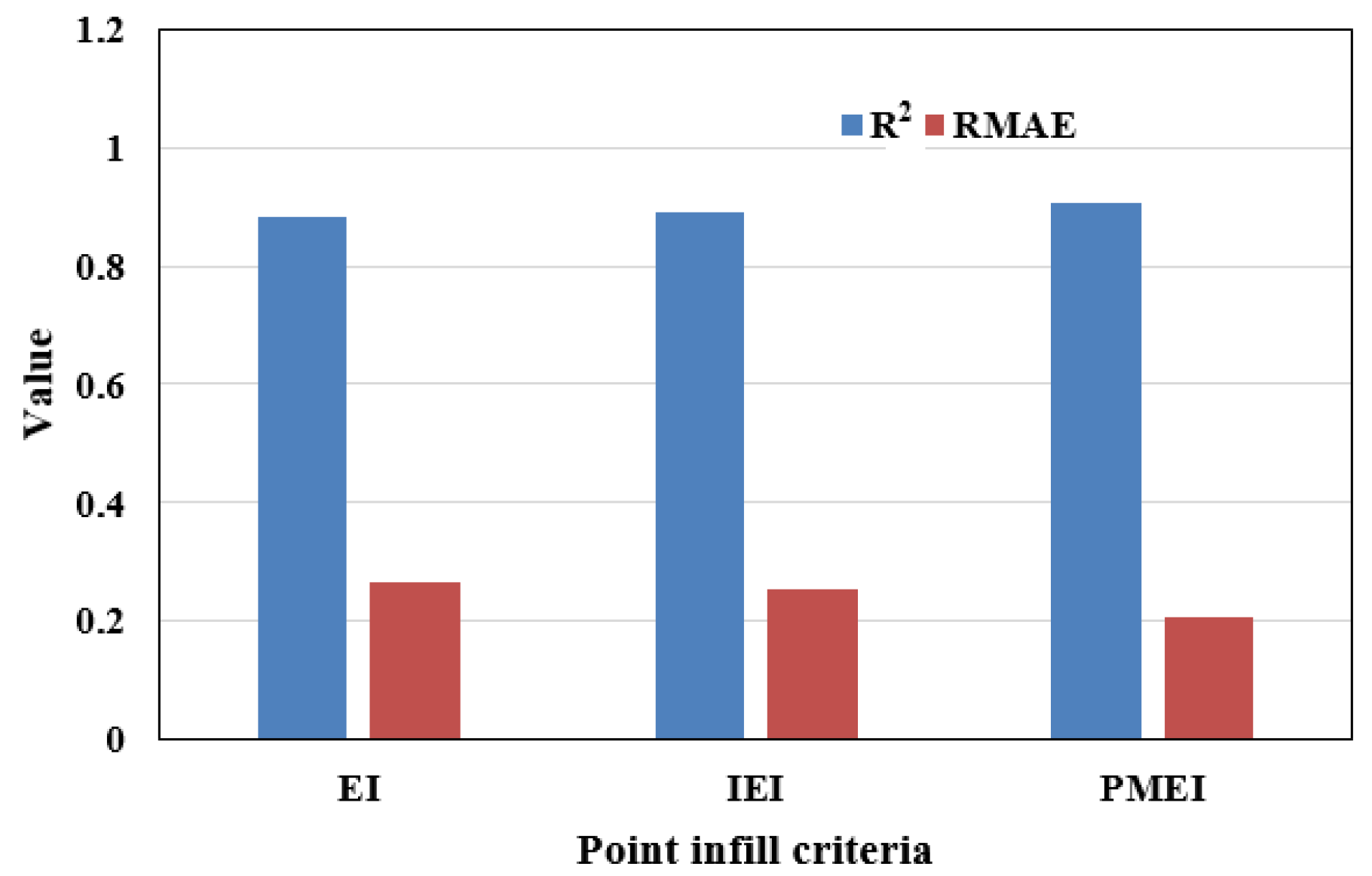
4.2. Accuracy Assessment of Surrogate Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B.L.; Yan, L.; Duan, X.J.; Yu, T.P.; Zhang, H. An integrated surrogate model constructing method: Annealing combinable Gaussian process. Inf. Sci. 2022, 591, 176–194. [Google Scholar] [CrossRef]
- Brigham, J.C.; Aquino, W. Surrogate-Model Accelerated Random Search algorithm for global optimization with applications to inverse material identification. Comput. Methods Appl. Mech. Eng. 2007, 196, 4561–4576. [Google Scholar] [CrossRef]
- Peng, Z.; Zhou, H.; Li, Y.; Li, D.Q. Process parameters optimization of injection molding using a fast strip analysis as a surrogate model. Int. J. Adv. Manuf. Technol. 2010, 49, 949–959. [Google Scholar]
- Koziel, S.; Pietrenko-Dabrowska, A. Rapid multi-objective optimization of antennas using nested kriging surrogates and single-fidelity EM simulation models. Eng. Comput. 2020, 37, 1491–1512. [Google Scholar] [CrossRef]
- Bacigalupo, A.; Gnecco, G.; Lepidi, M.; Gambarotta, L. Computational design of innovative mechanical metafilters via adaptive surrogate-based optimization. Comput. Methods Appl. Mech. Eng. 2021, 375, 113623. [Google Scholar] [CrossRef]
- Tian, K.; Li, Z.; Huang, L.; Du, K.; Jiang, L.; Wang, B. Enhanced variable-fidelity surrogate-based optimization framework by Gaussian process regression and fuzzy clustering. Comput. Methods Appl. Mech. Eng. 2020, 366, 113045. [Google Scholar] [CrossRef]
- Ahmadi, A.; Rezaei, M.; Sadeghieh, S.M. Interaction effects of flotation reagents for SAG mill reject of copper sulphide ore using response surface methodology. Trans. Nonferr. Met. Soc. China 2021, 31, 792–806. [Google Scholar] [CrossRef]
- Zhang, J.Q.; Qi, H.; Jiang, D.H.; He, M.J.; Ren, Y.T.; Su, M.X.; Cai, X.S. Acoustic tomography of two dimensional velocity field by using meshless radial basis function and modified Tikhonov regularization method. Measurement 2021, 175, 109107. [Google Scholar] [CrossRef]
- Tabari, M.M.R.; Sanayei, H.R.Z. Prediction of the intermediate block displacement of the dam crest using artificial neural network and support vector regression models. Soft Comput. 2019, 23, 9629–9645. [Google Scholar] [CrossRef]
- Vasu, S.S.; Davidson, D.F.; Hanson, R.K. Jet fuel ignition delay times: Shock tube experiments over wide conditions and surrogate model predictions. Combust. Flame 2008, 152, 125–143. [Google Scholar] [CrossRef]
- Han, Z.H.; Goertz, S. Hierarchical Kriging Model for Variable-Fidelity Surrogate Modeling. AIAA J. 2012, 50, 1885–1896. [Google Scholar] [CrossRef]
- Kim, J.K.; Kim, Y.J.; Yang, W.H.; Park, Y.C.; Lee, K.H. Structural design of an outer tie rod for a passenger car. Int. J. Automot. Technol. 2011, 12, 375–381. [Google Scholar] [CrossRef]
- Song, X.; Li, M.; Li, Z.; Liu, F. Global Optimization Algorithm Based on Kriging Using Multi-Point Infill Sampling Criterion and Its Application in Transportation System. Sustainability 2021, 13, 10645. [Google Scholar] [CrossRef]
- Belyaev, M.; Burnaev, E.; Kapushev, E.; Alestra, S.; Dormieux, M.; Cavailles, A.; Chaillot, D.; Ferreira, E. Building Data Fusion Surrogate Models for Spacecraft Aerodynamic Problems with Incomplete Factorial Design of Experiments. Adv. Mater. Res. 2014, 3413, 405–412. [Google Scholar]
- Koziel, S.; Pietrenko-Dabrowska, A. Reduced-cost surrogate modelling of compact microwave components by two-level kriging interpolation. Eng. Comput. 2020, 52, 960–972. [Google Scholar] [CrossRef]
- Fuhg, J.N.; Fau, A.; Nackenhorst, U. State-of-the-Art and Comparative Review of Adaptive Sampling Methods for Kriging. Arch. Comput. Methods Eng. 2020, 28, 2689–2747. [Google Scholar] [CrossRef]
- Kaps, A.; Czech, C.; Du, D.E. A hierarchical kriging approach for multi-fidelity optimization of automotive crashworthiness problems. Struct. Multidiscip. Optim. 2022, 65, 114. [Google Scholar] [CrossRef]
- Xiao, C.X. Nonmyopic Informative Path Planning Based on Global Kriging Variance Minimization. IEEE Robot. Autom. Lett. 2022, 7, 1768–1775. [Google Scholar] [CrossRef]
- Bean, B.; Sun, Y.; Maguire, M. Interval-valued kriging for geostatistical mapping with imprecise inputs. Int. J. Approx. Reason. 2022, 140, 31–51. [Google Scholar] [CrossRef]
- Maia, M.A.; Pa, R.E.; Melo, A.D. Kriging-based optimization of functionally graded structures. Struct. Multidiscip. Optim. 2021, 64, 1887–1908. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A. Design-oriented computationally-efficient feature-based surrogate modelling of multi-band antennas with nested kriging. Int. J. Electron. Commun. (AEÜ) 2020, 120, 153202. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A. Low-cost performance-driven modelling of compact microwave components with two-layer surrogates and gradient kriging. Int. J. Electron. Commun. (AEÜ) 2020, 126, 153419. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A.; Koziel, S.; AL-HASAN, M. Cost-Efficient Bi-Layer Modeling of Antenna Input Characteristics Using Gradient Kriging Surrogates. IEEE Access 2020, 8, 140831–140839. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A.; Al-Hzsan, M. Design-Oriented Two-Stage Surrogate Modeling of Miniaturized Microstrip Circuits With Dimensionality Reduction. IEEE Access 2020, 8, 121744–121754. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Jack, P.C.; Kleijnen; Wim, B.; Inneke, N. Expected improvement in efficient global optimization through bootstrapped kriging. J. Glob. Optim. 2012, 54, 59–73. [Google Scholar]
- Cadini, F.; Santos, F.; Zio, E. An improved adaptive kriging-based importance technique for sampling multiple failure regions of low probability. Reliab. Eng. Syst. Saf. 2014, 131, 109–117. [Google Scholar] [CrossRef]
- Marzat, J.; Walter, E.; Piet-Lahanier, H. A new expected-improvement algorithm for continuous minimax optimization. J. Glob. Optim. 2016, 64, 785–802. [Google Scholar] [CrossRef]
- Li, Y.; Cao, Y.; Liu, Z.; Liu, Y.; Jiang, Q. Dynamic optimal reactive power dispatch based on parallel particle swarm optimization algorithm. Comput. Math. Appl. 2009, 57, 1835–1842. [Google Scholar] [CrossRef]
- París, J.; Colominas, I.; Navarrina, F.; Casteleiro, M. Parallel computing in topology optimization of structures with stress constraints. Comput. Struct. 2013, 125, 62–73. [Google Scholar] [CrossRef]
- Joseph, V.R.; Hung, Y.; Sudjianto, A. Blind Kriging: A New Method for Developing Metamodels. J. Mech. Des. 2008, 130, 350–353. [Google Scholar] [CrossRef]
- Dey, S.; Mukhopadhyay, T.; Adhikari, S. Stochastic free vibration analyses of composite shallow doubly curved shells—A Kriging model approach. Compos. Part B Eng. 2015, 70, 99–112. [Google Scholar] [CrossRef]
- Parr, J.M.; Keane, A.J.; Forrester, A.I.J.; Holden, C.M.E. Infill sampling criteria for surrogate-based optimization with constraint handling. Eng. Optim. 2012, 44, 1147–1166. [Google Scholar] [CrossRef]
- Henkenjohann, N.; Kunert, J. An efficient sequential optimization approach based on the multivariate expected improvement criterion. Qual. Eng. 2007, 19, 267–280. [Google Scholar] [CrossRef]
- Zahedan, N.; Ahmadi, H.; Liaghat, G.H. Experimental and numerical investigation on the multi-optimization of reinforcing the side members of the vehicle structure. Arch. Civ. Mech. Eng. 2021, 22, 25. [Google Scholar] [CrossRef]
- Liao, X.; Li, Q.; Yang, X.; Zhang, W.; Li, W. Multiobjective optimization for crash safety design of vehicles using stepwise regression model. Struct. Multidiscip. Optim. 2007, 35, 561–569. [Google Scholar] [CrossRef]
- Jin, R.; Chen, W.; Simpson, T.W. Comparative studies of metamodelling techniques under multiple modelling criteria. Struct. Multidiscip. Optim. 2001, 23, 1–13. [Google Scholar] [CrossRef]
- Cui, A.; Xu, L.J.; Zhang, X.B.; Yang, Q. Design of Lightweight Hybrid Materials for the Cab Body-In-White of a Commercial Vehicle Based on Multi-Objective Optimization. Adv. Mater. Res. 2013, 2200, 281–286. [Google Scholar]
- Yin, H.; Wen, G.; Fang, H.; Qing, Q.; Kong, X.; Xiao, J.; Liu, Z. Multiobjective crashworthiness optimization design of functionally graded foam-filled tapered tube based on dynamic ensemble metamodel. Mater. Des. 2014, 55, 747–757. [Google Scholar] [CrossRef]
- Kodiyalam, S.; Yang, R.J.; Gu, L.; Tho, C.H. Multidisciplinary design optimization of a vehicle system in a scalable, high performance computing environment. Struct. Multidiscip. Optim. 2004, 26, 256–263. [Google Scholar] [CrossRef]
- Chen, D.Y.; Wang, L.M.; Wang, C.Z.; Yuan, L.K.; Zhang, T.Y.; Zhang, Z.Z. Finite element based improvement of a light truck design to optimize crashworthiness. Int. J. Automot. Technol. 2015, 16, 39–49. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variable | Part Name | Initial Value | Value Range |
|---|---|---|---|
| t1 | A-pillar outer plate | 1.20 | (0.84, 1.44) |
| t2 | A-pillar inner plate | 1.20 | (0.84, 1.44) |
| t3 | Top cover side plate | 1 | (0.7, 1.2) |
| t4 | Top cover beam | 1.5 | (1.05, 1.8) |
| t5 | Side wall longitudinal beam | 1.00 | (0.7, 1.2) |
| t6 | Front wall inner panel | 1.20 | (0.84, 1.44) |
| t7 | Front wall cover plate | 1.20 | (0.84, 1.44) |
| t8 | Roof front panel | 1 | (0.7, 1.2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Wen, J.; Wang, J.; Liu, W.; Yuan, S. A High-Precision Surrogate Modeling Method Based on Parallel Multipoint Expected Improvement Point Infill Criteria for Complex Simulation Problems. Mathematics 2022, 10, 3088. https://0-doi-org.brum.beds.ac.uk/10.3390/math10173088
Li S, Wen J, Wang J, Liu W, Yuan S. A High-Precision Surrogate Modeling Method Based on Parallel Multipoint Expected Improvement Point Infill Criteria for Complex Simulation Problems. Mathematics. 2022; 10(17):3088. https://0-doi-org.brum.beds.ac.uk/10.3390/math10173088
Chicago/Turabian StyleLi, Shande, Jian Wen, Jun Wang, Weiqi Liu, and Shuai Yuan. 2022. "A High-Precision Surrogate Modeling Method Based on Parallel Multipoint Expected Improvement Point Infill Criteria for Complex Simulation Problems" Mathematics 10, no. 17: 3088. https://0-doi-org.brum.beds.ac.uk/10.3390/math10173088