The dynamic path planner described in the previous section is tested in simulation.
5.1. Experiments Details
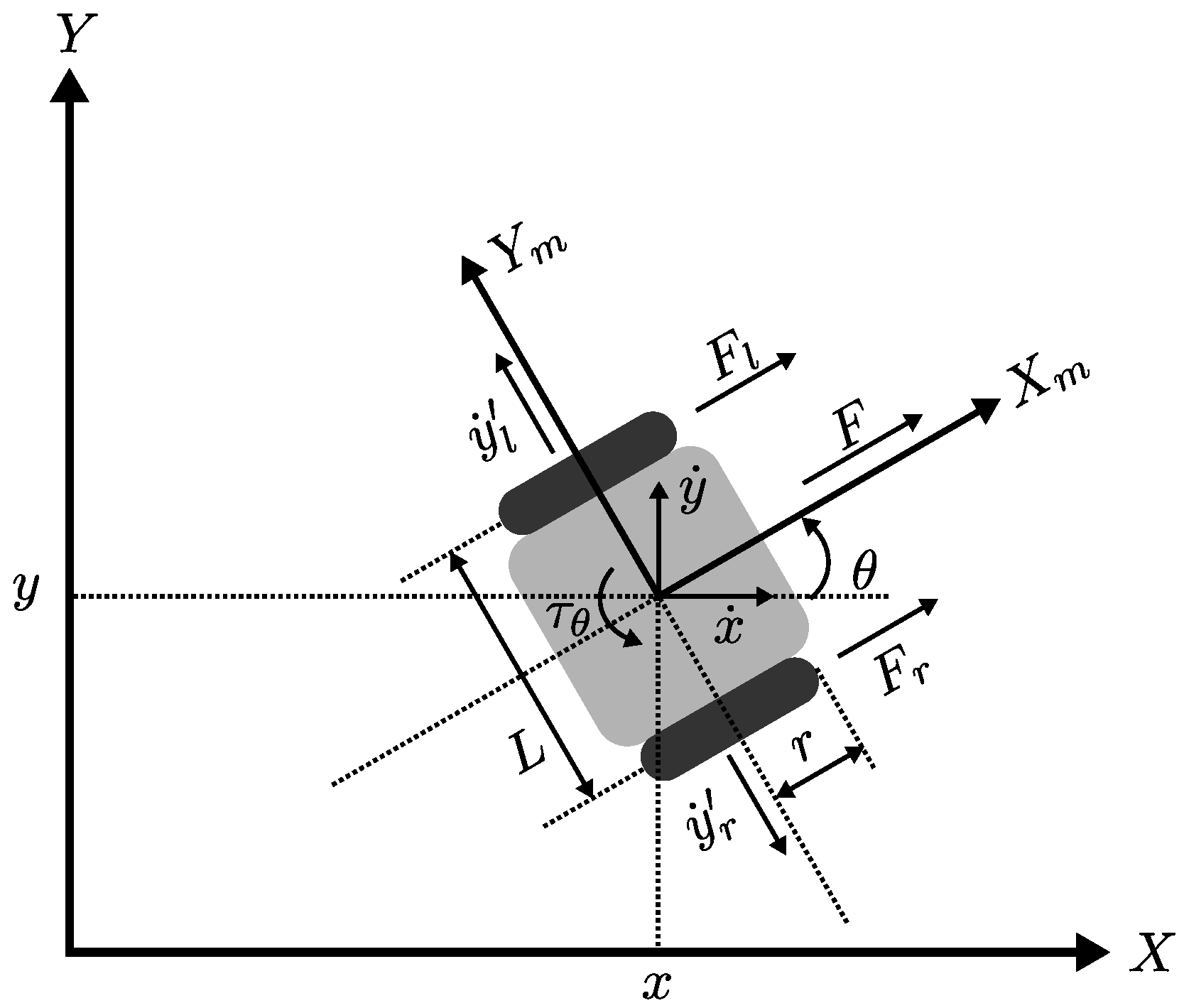
For the experimentation, the robot is simulated with the dynamic model in (
22) to provide results closer to reality. In that model, the kinematic parameters of the mobile robot are
L = 15 (cm) and
r = 2.4 (cm), while the dynamic ones are
m = 0.75 (kg) and
= 0.001 (kg·m
2), as proposed in [
39]. The mobile robot simulation is performed using the numerical Euler integration method with a step size
= 0.03 (s). Additionally, the proportional gains of the inverse dynamics controller in (
26) are chosen as
and
to govern the robot wheels based on the input commands
v and
. On the other hand, the scenario is not bounded and matches the horizontal
plane. Moreover, the start and goal points are fixed in the scenario. The start point is
(m) and the goal is
(m). The initial orientation of the differential mobile robot is
. Seven dynamic obstacles are considered within the scenario (
), each of them with the same size of the mobile robot, i.e.,
. The dynamic behavior of each obstacle in the scenario is described in
Table 1. The threshold used in Bug0 is set as
= 0.25 (m).
Concerning the dynamic optimization problem, the box constraints used to limit the values of the design variables are as follows: and . As for the kinematic simulation of the mobile robot required to make future predictions, a sampling interval , a prediction horizon , and Euler’s numerical integration method are used.
In the case of the metaheuristics DE, GA, and PSO, their parameters are selected based on the suggestions in the specialized literature. The parameters of DE are the scaling factor
F generated randomly in
at each generation and the crossover rate
[
48]. In the case of GA, the crossover and mutation probabilities are
(this value ensures that the same number of evaluations of the optimization problem are always carried out per generation) and
, while their distribution indexes are
and
[
50]. Finally, in PSO, the local and global knowledge constants are
and
, and the bound of the inertia weight are
and
[
54]. The population/swarm size is established as
and the maximum number of generations/iterations as
for all metaheuristics. The above aims to ensure that the computational cost of the optimization can be affordable in possible physical experimentation. The optimization procedure with the metaheuristics is launched when
. Since the controller gains are not optimized by DE until the first time that
is fulfilled, then it is used at first the pair of fixed gains
and
proposed in [
39].
All experiments are performed on a conventional personal computer and implemented in C++. The source code can be found at
https://dr-rodriguez-molina.com/codes/ (accessed on 12 October 2022).
5.2. Results and Discussion
In order to generate simulation results and obtain sufficient evidence of the proposal’s performance (from now on, D-Bug0), 30 independent runs were performed with each metaheuristic optimizer under the experimental conditions described in the previous section. The versions of D-Bug0 using Differential Evolution, Genetic Algorithm, and Particle Swarm Optimization are named D-Bug0/DE, D-Bug0/GA, and D-Bug0/PSO, respectively.
Table 2 shows the summary statistics on the performance of the alternatives D-Bug0/DE, D-Bug0/GA, and D-Bug0/PSO considering different indicators: the total path length, the number of collisions with the dynamic obstacles, the time it took the differential mobile robot to reach the goal, its average speed, and the computational time to process both the proposed path planning algorithm and the simulation. The best results in this table are highlighted in boldface.
Based on
Table 2, the proposed dynamic planner D-Bug0 can generate free-collision paths regardless of the adopted metaheuristic and despite the scenario having multiple moving obstacles. This is highly relevant because it could help safeguard the integrity of the actual differential mobile robot in a physical experimental environment to avoid unnecessary repair costs. Concerning the other indicators, significant differences can be noted in the performance of the three dynamic planners. The PSO-based alternative stands out from the others in terms of path length, time to goal, and execution time. On the other hand, D-Bug0/GA helps the mobile robot track the path at the highest speed. In the same table, the small value of the standard deviation, compared to the mean, for all indicators, indicates that the results obtained are very similar in each run, highlighting the reliability of D-Bug0.
Although the results in
Table 2 provide an overview of the performance of the different D-Bug0 planners, it is necessary to confirm the results with a non-parametric statistical test due to the stochastic behavior of the metaheuristics, which generates non-normal distributions of results for each group of 30 independent runs [
57]. The pairwise Wilcoxon rank-sum test was adopted for this purpose considering a
two-sided alternative hypothesis (this establishes that two results distributions have significant differences) and a statistical significance
(the minimum probability to accept the alternative hypothesis). The results of the Wilcoxon tests are in
Table 3. This table includes information from the Wilcoxon tests performed for each indicator considered in
Table 2. In addition, it describes the test performed and shows the sums of ranks
and
(these indicate respectively the number of times the first method outperformed the second and vice versa). The
p-value in the last column denotes the probability of accepting the alternative hypothesis and rejecting the
null hypothesis (this establishes that two results distributions do not have significant differences). The winner of each pairwise test is shown in boldface.
Table 4 summarizes the number of wins for each dynamic planner in the Wilcoxon test. Here, it can be confirmed that D-Bug0/PSO is the best alternative.
Having identified that the best dynamic planner is D-Bug0, it is appropriate to perform a more in-depth analysis of its performance. In this way,
Table 5 shows the results obtained with the D-Bug0/PSO planner corresponding to its 30 independent runs. The first column includes the run number, while the following columns show the path length, collisions, arrival time, speed, and execution time. At the bottom of the table are the summary statistics for each of the above columns. The results in boldface refer to the best results of the 30 runs.
In
Table 5, it can be observed that the difference between the minimum and maximum values is less than 0.01 (m) for the path length, approximately 0.01 (s) for the arrival time, and 0.003 (m/s) for the speed, which further denotes that such reliability in spite that D-Bug0/PSO is stochastic. On the other hand, D-Bug0/PSO shows efficiency since all the simulation runs are performed in an acceptable time in proportion to the arrival time. This is observed in the execution time column, where the results do not exceed 3.38 (s). In contrast, the standard deviation for this column is slightly higher in proportion to the mean concerning the rest of the columns. This is because the simulations are conducted on a conventional computer where, in addition, multiple processes derived from the operational functioning are executed at the same time.
At this point, making some observations regarding the execution time is important. One of the aspects that have a greater influence on the execution time in D-Bug0/PSO are the parameters of the PSO optimizer. In particular,
and
are the values that have the greatest impact on the time since they determine the number of evaluations of the optimization problem that the metaheuristics utilize (the number of evaluations is
). If the number of evaluations is insufficient, the optimizer may find solutions far from optimal. On the other hand, if the number of evaluations is excessive, time may prevent the practical implementation of the planner. One way to evaluate whether the number of evaluations is sufficient is through convergence plots such as those shown in
Figure 3. This figure shows the evolution of objective function value
J for the best solution in the swarm over the iterations in different optimization processes for an arbitrary run of D-Bug0/PSO. The figure shows that PSO needs about 50 iterations to obtain an unbeatable solution. Considering that, under the proposed experimental conditions, D-Bug0/PSO requires, on average, 96 optimization processes to complete the planning, the processing time for each process is affordable (i.e., less than
), with an adequate budget for problem evaluations. In the case of processing equipment with fewer resources than a conventional PC, the time window to obtain a solution with the metaheuristics can be longer, as it has been observed in other online optimization works [
58], however, some parameters of the proposal, such as
, must also be readjusted.
It is also interesting to observe a sketch of the behavior of D-Bug0/PSO.
Figure 4 shows an arbitrary execution of D-Bug0/PSO. This figure plots the complete scenario every 1.5 (s). The red, green, black, and blue circles represent the obstacles, the goal, the robot, and the path’s starting point, respectively. This figure shows how D-Bug0/PSO changes the avoidance direction and robot speed to avoid collisions with dynamic obstacles.
In addition, the results of D-Bug0/PSO are compared with those obtained with the original Bug0 algorithm considering obstacle avoidance always to the left and to the right (from now on, Bug0+ and Bug0−, respectively). The fixed gains for the controllers in Bug0+ and Bug0− are the same as the initial ones for D-Bug0, i.e., and .
Table 6 and
Table 7 include the results obtained with Bug0− and Bug0+ (i.e., Bug0 with fixed parameters and different obstacle avoidance directions), respectively, after 30 independent runs under the same experimental conditions as D-Bug0/PSO. The first column of these tables shows the number of the run, and the following columns show the travel distance, the number of times the robot collided with the dynamic obstacles, the time it took for the robot to reach the goal, the speed and the time it took for the computer to process each variant of the Bug0 algorithm as well as the simulation. As in
Table 5, the lower part of these two tables shows the same statistical measures for each column, and, similarly, the best results are shown in boldface.
Table 6 and
Table 7 show that the standard deviation is zero for path length, arrival time, and speed, highlighting the deterministic behavior of the Bug0 algorithms. Therefore, the same results of these columns are always observed in each of the 30 independent runs of the Bug0 algorithms. Small variations in execution time values are attributed to other tasks executed in the computer’s operating system. On the other hand, one of the most important findings in these two tables is that the paths generated by Bug0+ and Bug0− always collide with dynamic obstacles. In the case of Bug0−,
Table 6 shows that the number of collisions is 19, while in the case of Bug0−,
Table 7 indicates it is 16. The difference between the number of collisions is due to the fixed direction in which Bug0+ and Bug0− avoid obstacles. The above results indicate that although the null variation in the results of the runs could be desirable, the generated paths do not meet the objective of collision avoidance and may lead to additional costs during physical testing. For this reason, Bug0 with fixed parameters may not be suitable for path planning in dynamic environments.
Based on
Table 5,
Table 6 and
Table 7, it can be noted that the paths generated by D-Bug0/PSO have, in all cases, reduced path lengths, collisions, and arrival times, and consequently, higher speed values. Based on the above, the paths generated by D-Bug0/PSO are better than those of the original Bug0 planning method. In particular, the fact that the number of collisions in the paths generated by D-Bug0 is zero, while in the paths obtained by Bug0+ and Bug0− it is different, indicates a great advantage of the first method since it can lead to significant savings in robot damage costs in a real scenario. Therefore, after observing the data yielded by the path planners, the high efficiency of the D-Bug0/PSO becomes clear since it obtains better results in all the aspects listed in the
Table 5,
Table 6 and
Table 7, except for the simulation execution time, although the last one is still affordable for eventual experimentation with the physical device.
Finally,
Figure 5 and
Figure 6 describe the behavior of an arbitrary execution of Bug0− and Bug0+, respectively. These figures include plots of the full scenario every 1.5 (s). The red, green, black, and blue circles represent the obstacles, the goal, the differential mobile robot, and the start of the path, respectively. These figures show how the Bug0 path planner tries (and sometimes fails) to avoid dynamic obstacles by changing the robot’s direction to the left (for Bug0+) or right (for Bug0−) of the potential collision point, even when it might not be the most suitable direction. Moreover, it is observed that, for some obstacles, the speed with which the robot moves, related to the fixed gains
and
, is adequate.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}