
Liouville-Type Results for a Three-Dimensional Eyring-Powell Fluid with Globally Bounded Spatial Gradients in Initial Data



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction and Problem Formulation
2. Statement of Result
3. Preliminaries
4. Proof of Theorem 1
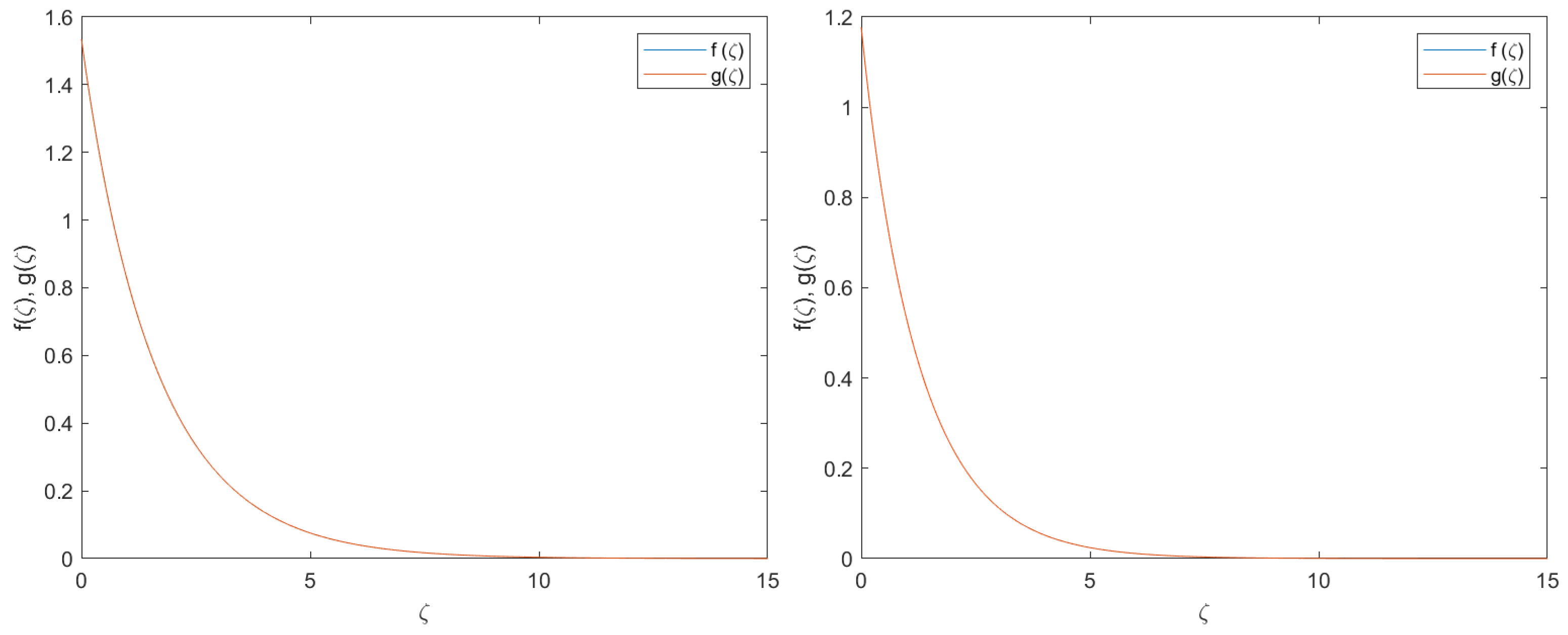
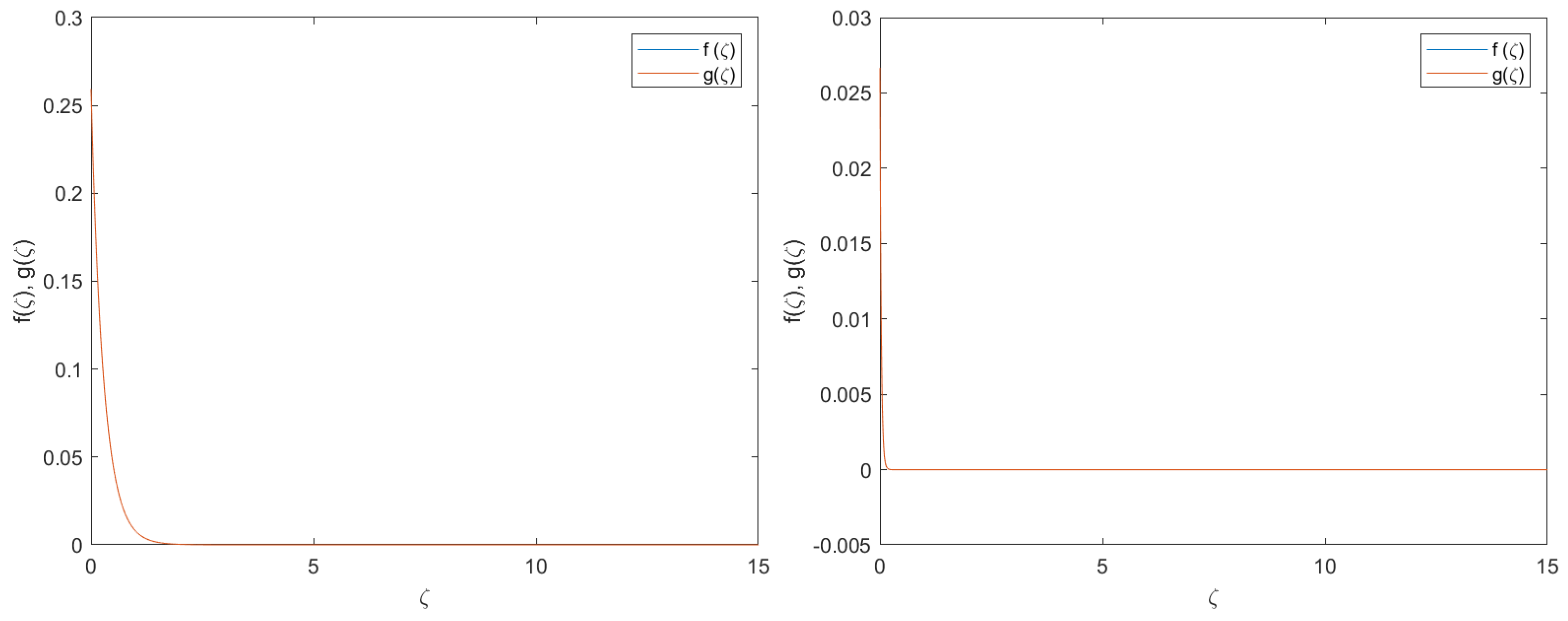
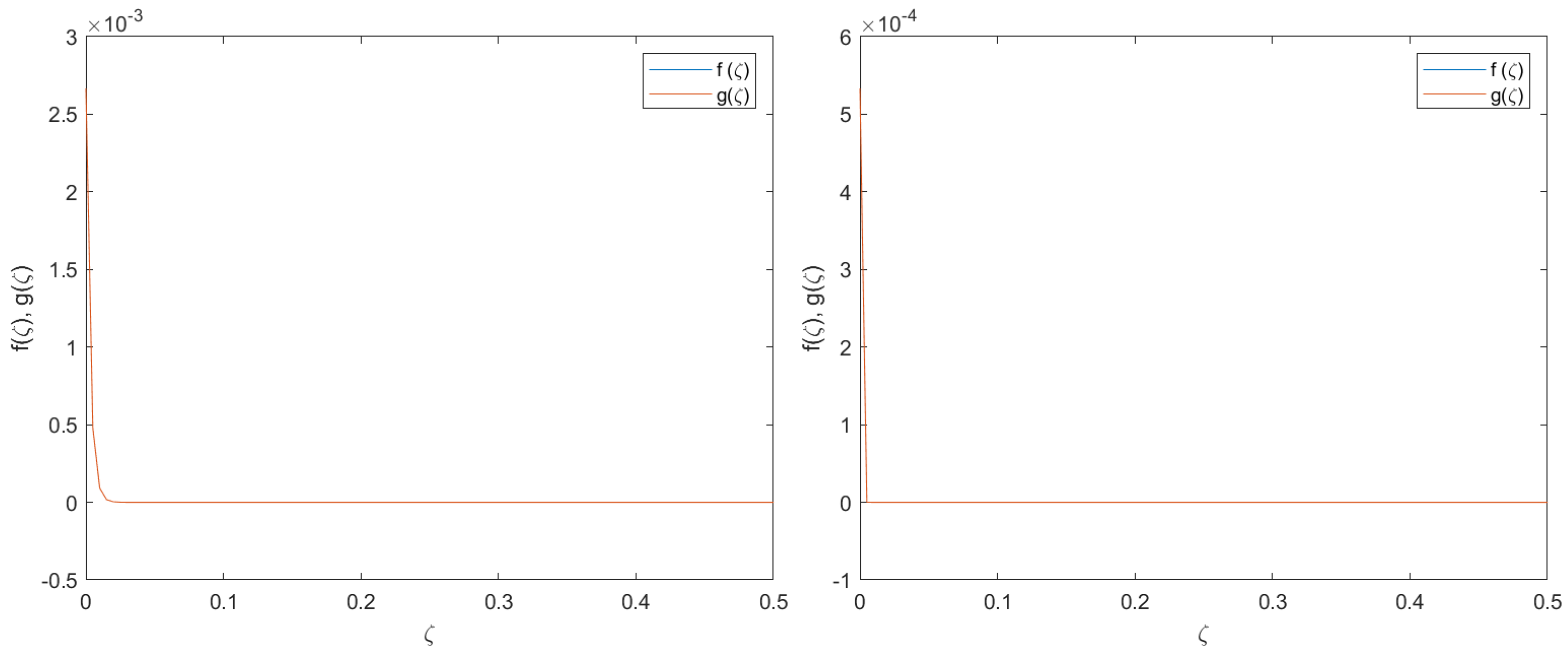
5. Numerical Assessment under the Travelling Waves Domain
- The numerical routine was compiled with the Matlab function, bvp4c. This function is based on a Runge–Kutta implicit approach with interpolant extensions [19]. The bvp4c collocation method required the specification of the boundary conditions, which in this case were given by the following equations:where , for the numerical assessment, . To execute the numerical exercise, the profiles at were taken as a mean over a sufficiently large square so as to admit the conditions and .
- The integration domain was considered as , sufficiently large to admit the condition , or equivalently a condition in which the collocation method in the boundaries does not impact the shape of the solution.
- The travelling wave domain was divided into 100,000 nodes, with an accumulated absolute error of during the computation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ara, A.; Khan, N.A.; Khan, H.; Sultan, F. Radiation effect on boundary layer flow of an Eyring–Powell fluid over an exponentially shrinking sheet. Ain-Shams Eng. J. 2014, 5, 1337–1342. [Google Scholar] [CrossRef] [Green Version]
- Hayat, T.; Iqbal, Z.; Qasim, M.; Obaidat, S. Steady flow of an Eyring Powell fluid over a moving surface with convective boundary conditions. Int. J. Heat Mass Transf. 2012, 55, 1817–1822. [Google Scholar] [CrossRef]
- Hayat, T.; Awais, M.; Asghar, S. Radiative effects in a threedimensional flow of MHD Eyring-Powell fluid. J. Egypt. Math. Soc. 2013, 21, 379–384. [Google Scholar] [CrossRef] [Green Version]
- Akbar, N.S.; Ebaid, A.; Khan, Z. Numerical analysis of magnetic field on Eyring-Powell fluid flow towards a stretching sheet. J. Magn. Magn. Mater. 2015, 382, 355–358. [Google Scholar] [CrossRef]
- Jalil, M.; Asghar, S.; Imran, S. Self similar solutions for the flow and heat transfer of Powell-Eyring fluid over a moving surface in parallel free stream. Int. J. Heat Mass Transf. 2013, 65, 73–79. [Google Scholar] [CrossRef]
- Khan, J.A.; Mustafa, M.; Hayat, T.; Farooq, M.A.; Alsaedi, A.; Liao, S. On model for three-dimensional flow of nanofluid: An application to solar energy. J. Mol. Liq. 2014, 194, 41–47. [Google Scholar] [CrossRef]
- Javed, T.; Abbas, Z.; Ali, N.; Sajid, M. Flow of an Eyring–Powell nonnewtonian fluid over a stretching sheet. Chem. Eng. Commun. 2013, 200, 327–336. [Google Scholar] [CrossRef]
- Riaz, A.; Ellahi, R.; Sait, S.M. Role of hybrid nanoparticles in thermal performance of peristaltic flow of Eyring–Powell fluid model. J. Therm. Anal. Calorim. 2021, 143, 1021–1035. [Google Scholar] [CrossRef]
- Nadeem, S.; Malik, M.Y.; Hussain, A. Boundary layer flow of an Eyring–Powell model fluid due to a stretching cylinder with variable viscosity. Sci. Iran. 2013, 20, 313–321. [Google Scholar]
- Bhatti, M.M.; Abbas, T.; Rashidi, M.M.; Ali, M.E.-S.; Yang, Z. Entropy generation on MHD Eyring–Powell nanofluid through a permeable stretching surface. Entropy 2016, 18, 224. [Google Scholar] [CrossRef] [Green Version]
- Chae, D.; Wolf, J. On Liouville-type Theorems for the Steady-Navier Stokes equations in R3. J. Differ. Equ. 2016, 261, 5541–5560. [Google Scholar] [CrossRef]
- Seregin, G. Liouville-type Theorems for the Stationary Navier-Stokes equations. Nonlineartiy 2016, 29, 2191–2195. [Google Scholar] [CrossRef] [Green Version]
- Chamorro, D.; Jarrin, O.; Lemarie-Rieusset, P.G. Some Liouville Theorems for stationary Navier-Stokes equations in Lebesgue and Morrey Spaces. arXiv 2018, arXiv:1806.03003v1. [Google Scholar]
- Chae, D. Liouville-type theorems for the forced Euler equations and the Navier-Stokes equations Commun. Math. Phys. 2014, 326, 37–48. [Google Scholar] [CrossRef] [Green Version]
- Chae, D.; Yoneda, Y. On the Liouville theorem for the stationary Navier-Stokes equations in a critical space. J. Math. Anal. Appl. 2013, 405, 706–710. [Google Scholar] [CrossRef]
- Koch, G.; Nadirashvili, N.; Seregin, G.; Šverák, V. Liouville theorems for the Navier-Stokes equations and applications. Acta Math. 2009, 203, 83–105. [Google Scholar] [CrossRef]
- Solonnikov, V.A. Estimates of the solutions of the nonstationary Navier-Stokes system. In Boundary Value Problems of Mathematical Physics and Related Questions in the Theory of Functions, 7th ed.; Zapiski Nauchnykh Seminarov LOMI; Nauka: Sankt Petersburg, Russia, 1973; Volume 38, pp. 153–231. [Google Scholar]
- Azzam, J.; Bedrossian, J. Bounded mean oscillation and the uniqueness of active scalar equations. Trans. Am. Math. Soc. 2015, 367, 30953118. [Google Scholar] [CrossRef] [Green Version]
- Enright, H.; Muir, P.H. A Runge-Kutta Type Boundary Value ODE Solver with Defect Control; Tehnical Report 267/93; Department of Computer Sciences, University of Toronto: Toronto, ON, Canada, 1993. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz, J.L.; Rahman, S.; Nouman, M.; González, J.R. Liouville-Type Results for a Three-Dimensional Eyring-Powell Fluid with Globally Bounded Spatial Gradients in Initial Data. Mathematics 2022, 10, 741. https://0-doi-org.brum.beds.ac.uk/10.3390/math10050741
Díaz JL, Rahman S, Nouman M, González JR. Liouville-Type Results for a Three-Dimensional Eyring-Powell Fluid with Globally Bounded Spatial Gradients in Initial Data. Mathematics. 2022; 10(5):741. https://0-doi-org.brum.beds.ac.uk/10.3390/math10050741
Chicago/Turabian StyleDíaz, José Luis, Saeed Rahman, Muhammad Nouman, and Julián Roa González. 2022. "Liouville-Type Results for a Three-Dimensional Eyring-Powell Fluid with Globally Bounded Spatial Gradients in Initial Data" Mathematics 10, no. 5: 741. https://0-doi-org.brum.beds.ac.uk/10.3390/math10050741