1. Introduction
The electrical behaviour of cells, biological tissues, or electrode-tissue interfaces can be used for their characterization [
1,
2,
3,
4]. One way to do this is by measuring the electrical impedance, that is, the opposition that the system under study exhibits to an alternating current flow as a function of frequency. Subsequently, experimental impedance data are fitted to an electrical equivalent circuit (EEC), which is a mathematical model that approximates the electrical behaviour of the system under study. Thus, the EEC parameters give information about the physiological state of a tissue or about the electrode processes occurring in the electrode-tissue interface (ETI). For instance, it is useful to know the electrical/electrochemical behaviour of the ETI plays a significant role in the biopotential measurements or also in the propagation of an applied stimuli. It should be mentioned that the experimental impedance data are analysed by using an impedance function. This impedance function can be proposed from a plausible physical theory (that predicts the impedance) or from an EEC, that aids in the visualization of the physical processes occurring in the system under study [
1].
In this paper, we work with linear time-invariant (LTI) circuits, that is, LTI systems that fulfil the properties of linearity and invariance in time, meaning that the superposition and proportionality principles are hold. From the study of the circuit theory, a LTI circuit in which the input
is an electrical current (amperes), the output
is a voltage (volts), and
t is the time (seconds) can be described by an ordinary, linear differential equation (ODE) with constant coefficients
and order
n for
as [
5]:
Without loss of generality, we have assumed that
.
Let us now consider the input
, where
s is a time-independent parameter. It can be shown that the output (refer to Equation (
1)) can be written as
, where
is an impedance function (in units of ohms,
), which relates the voltage to the current:
The input given by
is extremely versatile. It allows us to obtain the forced response to a constant input (
) or to a sinusoidal input (
, where
j is the imaginary unit and
is the angular frequency in rad/s with
, where
f is frequency in Hz). This latter response is known as frequency response of systems, that is, the response of a system to input sinusoids of different frequencies. Moreover,
constitutes a basis function involving the Fourier series and the Fourier and Laplace transforms [
5].
Note in particular that the parameter
s in (
2) can be interpreted as the variable that appears in the Laplace transform or as the differential operator (
, typically denoted by
p) [
6]. When
, the circuit is operating at sinusoidal steady-state. Specifically, by considering the Laplace transform of Equation (
1), assuming zero initial conditions, we can write
, where
and
are the Laplace transforms of the input
and the output
, respectively. Interestingly, the unit-impulse (
,
, where
is Dirac delta function) response is
, that is, the Laplace transfom of the voltage output equal the impedance
.
Electrical impedance has been usually defined in the context of a single sinusoidal signal and phasor analysis [
6]. The impedance
at the frequency
, is a complex number whose magnitude and phase are
and
, respectively. Equivalently,
can also be expressed in terms of its real and imaginary components, that is, the resistance
and the reactance
, respectively.
Note that for physical frequencies (
), the impedance in Equation (
2) can be written according to Equation (
3). Hereinafter, the impedance
is also denoted by
.
Regarding the sinusoidal signal, it should be mentioned that the square of the rms (root mean square) value of a sinusoidal signal is the average power associated with it, that is, the average power is concentrated at frequency
. Importantly, the average power associated with a periodic signal is the sum of the squared rms values (sum of the average powers) of all its components (Parseval’s theorem for periodic signals). Therefore, the power spectral density (which, when integrated over the whole spectrum frequency, gives the total average power) for a periodic signal (power signal) consists of a series of impulses [
7].
In this paper, we focus on finding the input frequencies to the circuit which maximises the amount of information obtained from an experiment, given that the true system is a priori known. Optimal input designs concern finding the input signal, which assures that the estimates become as good as possible. The use of optimal input signals will increase the precision of the parameter estimators [
8]. This problem, called optimal input design, arises from the works of Mehra [
9,
10]. The theory of optimal design of experiments for the construction of optimal input signals in control theory, involving the frequency domain, can be found in [
11,
12,
13,
14,
15,
16,
17,
18]. However, its use for electrical impedance models has been scarcely reported in the scientific literature. Considerations of optimal multisine input signals are analysed in [
19,
20,
21]. Specifically, a D-optimal multisine excitation for broadband impedance spectroscopy measurements is proposed in [
20]. These optimal designs are based on simple first-order LTI circuits, that is, they are described by an ODE of order 1. The objective of this work is to design the D-optimal frequencies in which to carry out the electrical impedance measurements to achieve the best statistical estimates. Specifically, we calculate approximate and exact optimal designs by optimizing the determinant of the information matrix by adapting the REX random exchange algorithm and KL exchange algorithm. To the best of the authors’ knowledge, there is no previous report of modifying those algorithms to calculate D-optimal designs in the frequency domain. In
Section 2, we provide an introduction to the D-optimal input design applied to the study of a simple impedance model, which approaches the electrical behaviour of basic bio-electrodes or cell membranes. The definition of the Fisher Information Matrix (FIM) and the spectral density function are presented.
Section 3 is devoted to the D-optimization criterion, the directional derivative, the equivalence theorem and the two algorithms adapted. Finally, in
Section 4, we include a real application. The results obtained from an experimental test carried out with the two algorithms adapted to compare the efficiency of the design commonly used by experimenters with the D-optimal designs obtained from the algorithms are also discussed in this section.
3. Construction of D-Optimal Input Signals
Among a set of designs, it is not easy to decide which is “the best” of them. Therefore, we need to choose a criterion, a scalar measure of the FIM,
, called optimality criterion, that helps us to find the best design. The choice will depend on the interests sought by conducting the experiment. A design that minimizes
over all the designs on
is called an optimum design, that is
The most popular criterion is D-optimality. This criterion consists of minimizing the volume of the confidence ellipsoid of estimators of the parameters of the model, i.e., it maximizes the determinant of the FIM. For a given
, D-optimality is defined by the criterion function:
When an optimal design is sought among all approximate designs on the design space and the design criterion is convex, it can be checked the optimality of a particular design using the celebrated General Equivalence Theorem (GET) [
24]. If the criterion function,
, is differentiable the GET has a friendly version. Thus, a design
is
-optimum if and only if
, the dispersion function
achieves its maximum values at the support points. In particular, for the D-optimum criterion this condition proves the optimality of
if and only if
being
k the number of the parameters of the model.
The GET allows us to check the optimality of a design, but it does not tell us how to find it. However, this theorem is useful for building efficient algorithms that allow computing optimal designs.
Another fundamental tool commonly used by the algorithmic techniques is the efficiency of a design. This value is interpretated as the goodness of a design and is defined as
, being
the
-optimal design. Thus the D-efficiency of a design
is computed as:
If the criteron function has a homogeneity property, as in this case, there is a practical statistical interpretation. Thus, if a design has 50 % efficiency, then half of the observations with the optimal design will produce the same results with respect to the criterion function. Although this quantity cannot be calculated when the optimal design is unknown, it is possible to obtain lower limits of efficiency to make a stopping rule. An important bound for the D-optimization criterion is the one proposed by Atwood [
27]
Modified Algorithms
The search for analytical solutions for the problem of construction of optimal designs turns out to be a difficult task and, in most of the real problems, it is not possible to calculate analytically the designs under a certain criterion. There is a rich literature on numerical computational algorithms proposed to obtain optimal designs under different scenarios. In exact design problems, we do not have a convex optimization problem in general and, so, finding optimal design is not an easy task because it is a discrete optimization problem and there is no general analytical tool for confirming whether an exact design is optimal or not. There are several numerical algorithms for finding optimal exact designs based on exchange methods. In this paper, we proposed the Atkinson and Donev KL exchange algorithm [
28] to calculate exact D-optimal designs. The procedure starts with a non-singular random design. Then, two sets of points are constructed from the dispersion function. One with
K “least promising” support points of the current design, for which exchanges are attempted. The other one with
L “most promising” candidate design points. Finally, it adds and deletes observation points that lead to the greatest increase in the determinant of the FIM, under the standard constraint of the required number of points and the maximum execution time of the algorithm. Each exchange of improvement is executed immediately. Because this is only a heuristic, it cannot be guaranteed to reach the global optimum, so it is convenient to run the algorithm several times. The end result is the best design found in all runs.
For optimal approximate design problems, there are many analytic methods to construct them. Due to the performance and the flexibility to be applied in a broad range of problem structures and sizes, the randomized exchange algorithm (REX) [
29] has been considered in this work. The REX method, which is a simple batch-randomized exchange algorithm, can be viewed as an efficient extension or combination of both the vertex exchange method for D-optimality of Böhning [
30] and the KL exchange algorithm. The procedure begins with a random design of non-singular points and their respective proportions. Then, a batch consisting of a pair of points is repeatedly selected: a random support point of the current design,
, and a random design point,
, where optimal ratio exchanges between these pairs are made. The batch selection depends on the dispersion function. The key to making the optimal random exchanges of proportions between the selected batch is the optimal step length value
(see Appendix A in [
29]), which gives the value to be added or subtracted from the proportions of each observation point. Finally, it adds and deletes observation points that lead to the largest increase in the efficiency bound. This algorithm has a standard threshold constraint on the minimum design efficiency to stop the computation. The limit used as the stopping rule is the Atwood limit (
23).
These algorithms were adapted to involve complex variables. The matrix of Equation (
13) is given as input for both algorithms. We develop a complex type null matrix and then it is completed by creating a loop, where each row of the complex null matrix is replaced by the components of (
13). Each row corresponds to a value of
within
previously defined. Next, we adapt the definition of the single frequency FIM (see Equation (
15)) and the dispersion function (
20). Modified codes to adapt the algorithms to this case study can be found in
Appendix C.
The general procedure followed by these algorithms can be summarized as:
An initial design is chosen. In principle, it can be any arbitrary design, , such that the criterion function for this design verifies .
A succession of designs is obtained computationally in an iterative way, where is calculated by slightly disturbing the previous design and requiring that .
The process of generating the previous designs will end in the qth step after verifying that the design obtained is close enough to the optimum according to a stopping rule.
4. Real Applications
As mentioned earlier, biological tissues, cells, and ETIs can be characterized from their electrical behaviour.
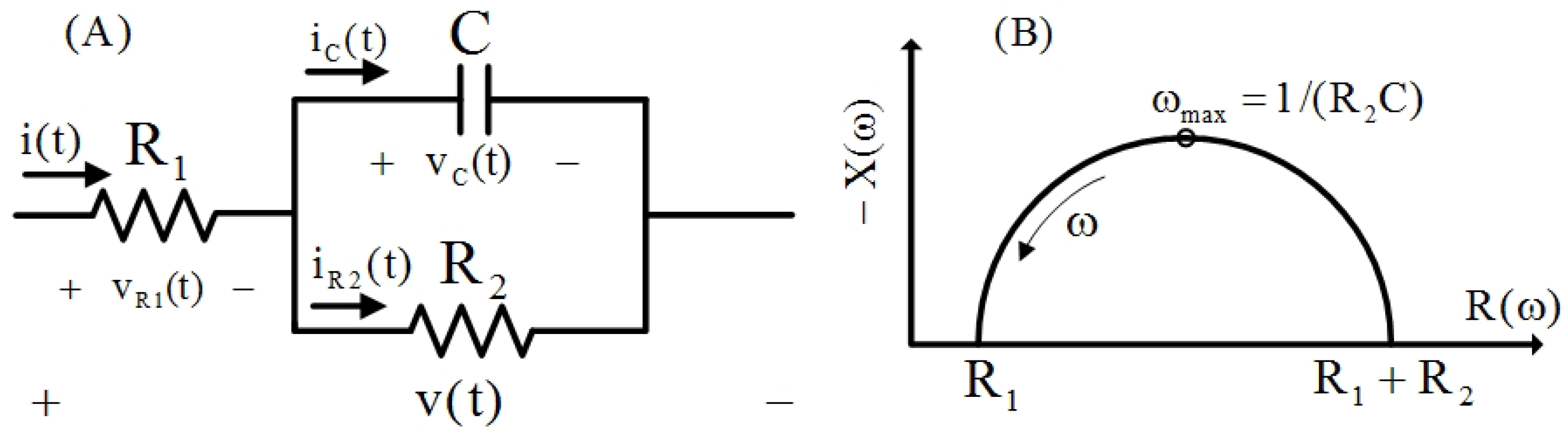
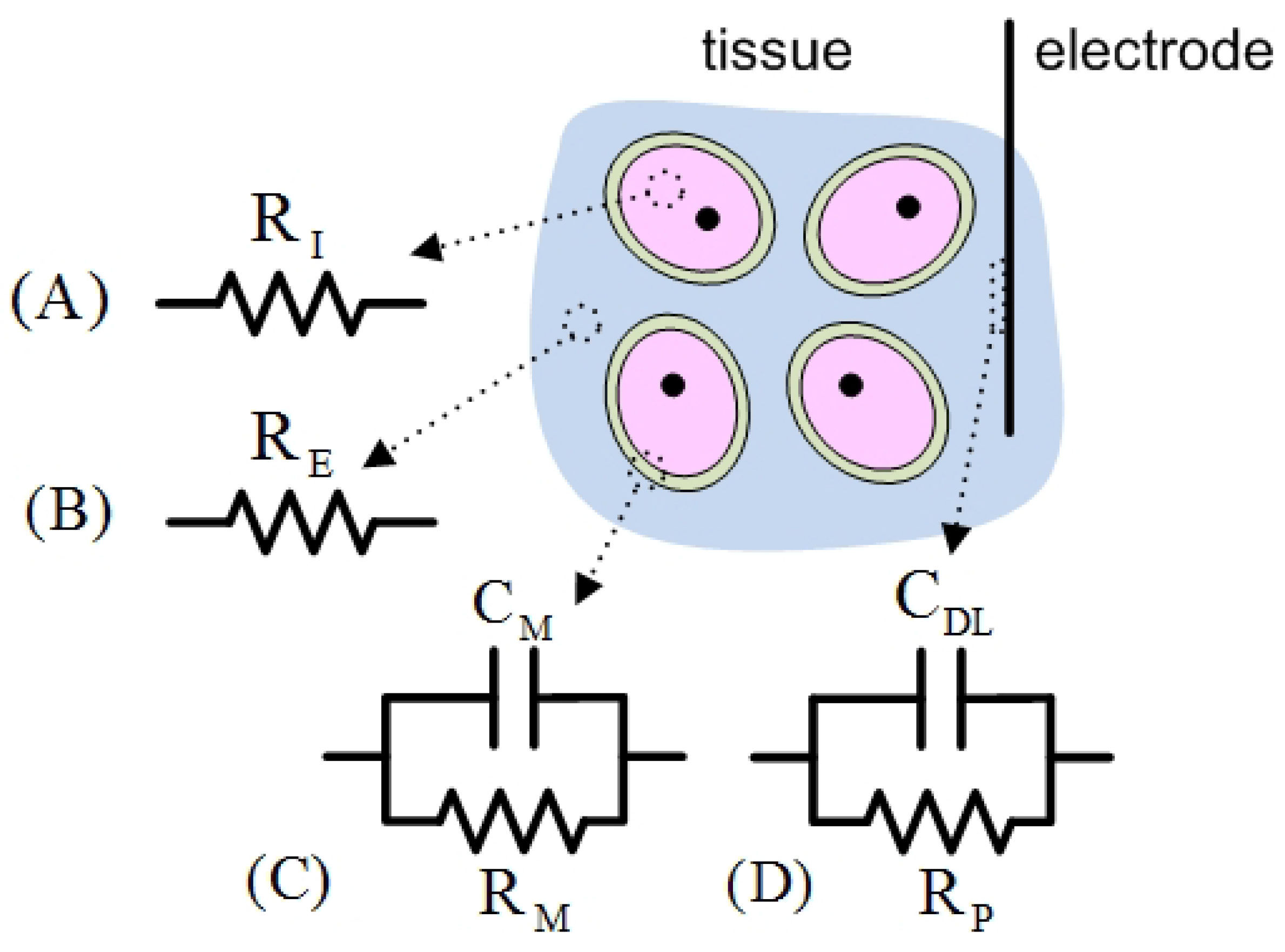
Figure 2 shows a portion of tissue (group of similar cells) with an implanted electrode. In general, the passive electrical behaviour of the tissue and the ETI involve electrical capacitance (capacity to store charges) and resistance (ability to oppose dc-current flow).
Figure 2 also shows several basic EECs [
1,
2,
3,
4]. Intra- (pink colour) and extracellular (blue colour) media are resistive parts (electrolyte solutions), and thus are modelled by the resistances
(
Figure 2A) and
(
Figure 2B), respectively. The passive electrical behaviour of a cell membrane (green colour) is described by a parallel combination of a cell membrane capacitance
and the membrane resistance
(see
Figure 2C). A basic model of ETI is shown in the EEC of
Figure 2D, that is, a double layer capacitance
in parallel with the polarization resistance
[
1,
3]. The EEC shown in
Figure 1A involves those of
Figure 2C,D with an additional resistance
. Moreover, the impedance of the EEC of
Figure 1A is equivalent to that proposed by Cole when the biological tissue involves an ideal capacitance [
2,
4].
It should be mentioned that the optimal design of experiments is of great interest for two main reasons: to obtain an optimal characterization of the process and to minimize the measurement acquisition time.
4.1. Methods
The modified algorithms were applied to the circuit shown in
Figure 1A. Let
,
and
the nominal values of the parameters and
rad/s. For numerical study, we consider the frequency design space to be a set of grid points spread equidistantly by
.
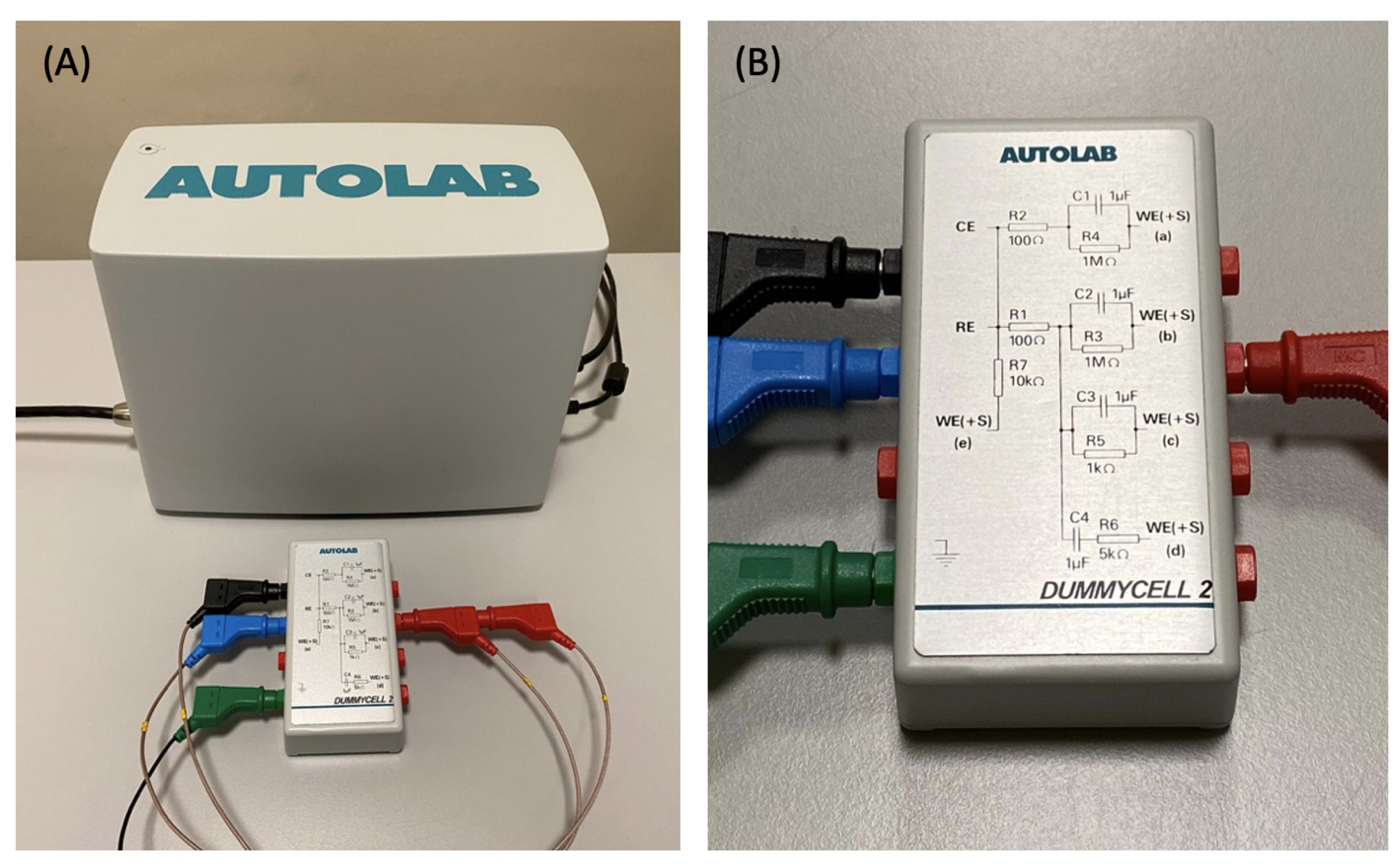
We have used the RStudio 1.3.1093 program to obtain the optimal designs. The Autolab PGSTAT204 potentiostat/galvanostat (
Figure 3A), equipped with the FRA32M module, was used to perform the impedance measurements. The equipment, controlled by a computer and NOVA electrochemistry software, is connected to a dummy cell containing the circuit described above to perform the test (
Figure 3B). We used sinusoidal current signals of
A peak amplitude.
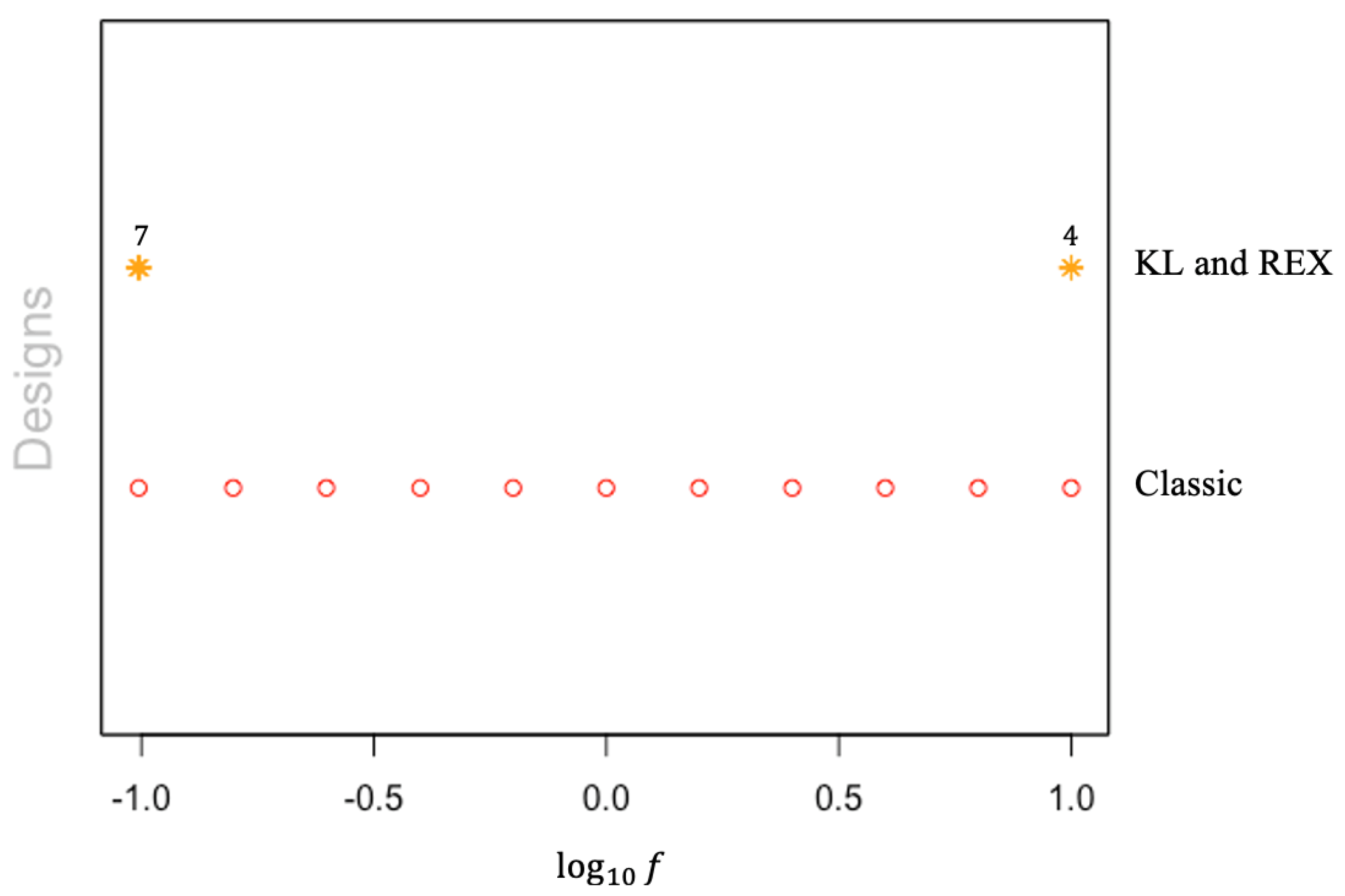
The objective of this experimental test was to compare the efficiency of the classical design commonly used by experimenters with the D-optimal designs obtained in the adapted KL and REX algorithms. The classic design is based on measuring impedance at certain frequencies equally spaced on a logarithmic scale. In particular
where
. For comparison purposes, the adapted KL algorithm was executed considering the same number of support points as the classic design (
). In the case of the REX algorithm, from a theoretical point of view, it is not necessary to set
N. The algorithm provides points and the proportions to be measured at those points. In order to be able to compare the design obtained, the proportion was rounded to the nearest integer, that is, if the design puts weight
on
,
and the total number of observations we want is
, then approximately
observations will be taken at
,
.
4.2. Results and Discussion
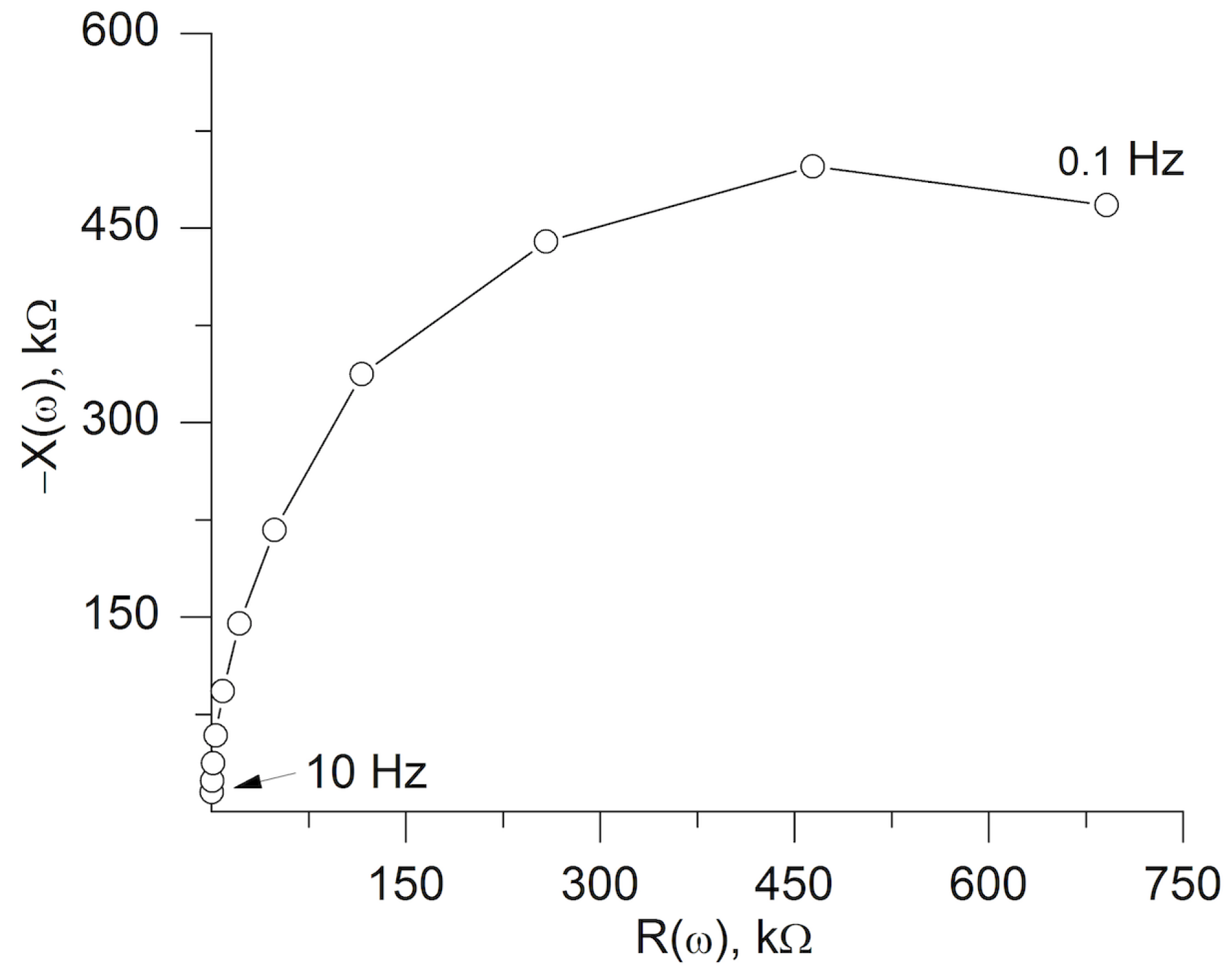
Figure 4 shows the Nyquist plot for the EEC of
Figure 3B. Experimental impedance data obtained for the frequencies of (
24) draw a semicircle like that of
Figure 1B. Subsequently, experimental data have been fitted to the EEC of
Figure 1A and the values of its parameters are given in
Table 1.
In this experimental test, there was a prior knowledge of the EEC parameters with a certain tolerance. In this case, the following initial values were considered to execute the algorithms:
where
,
and
. To avoid dependence on the value of these parameters, a sequential approach was applied with the estimates obtained in the previous step. The stabilization of the process was fast (
Table 1). Finally, the optimal design obtained with the two algorithms was the following:
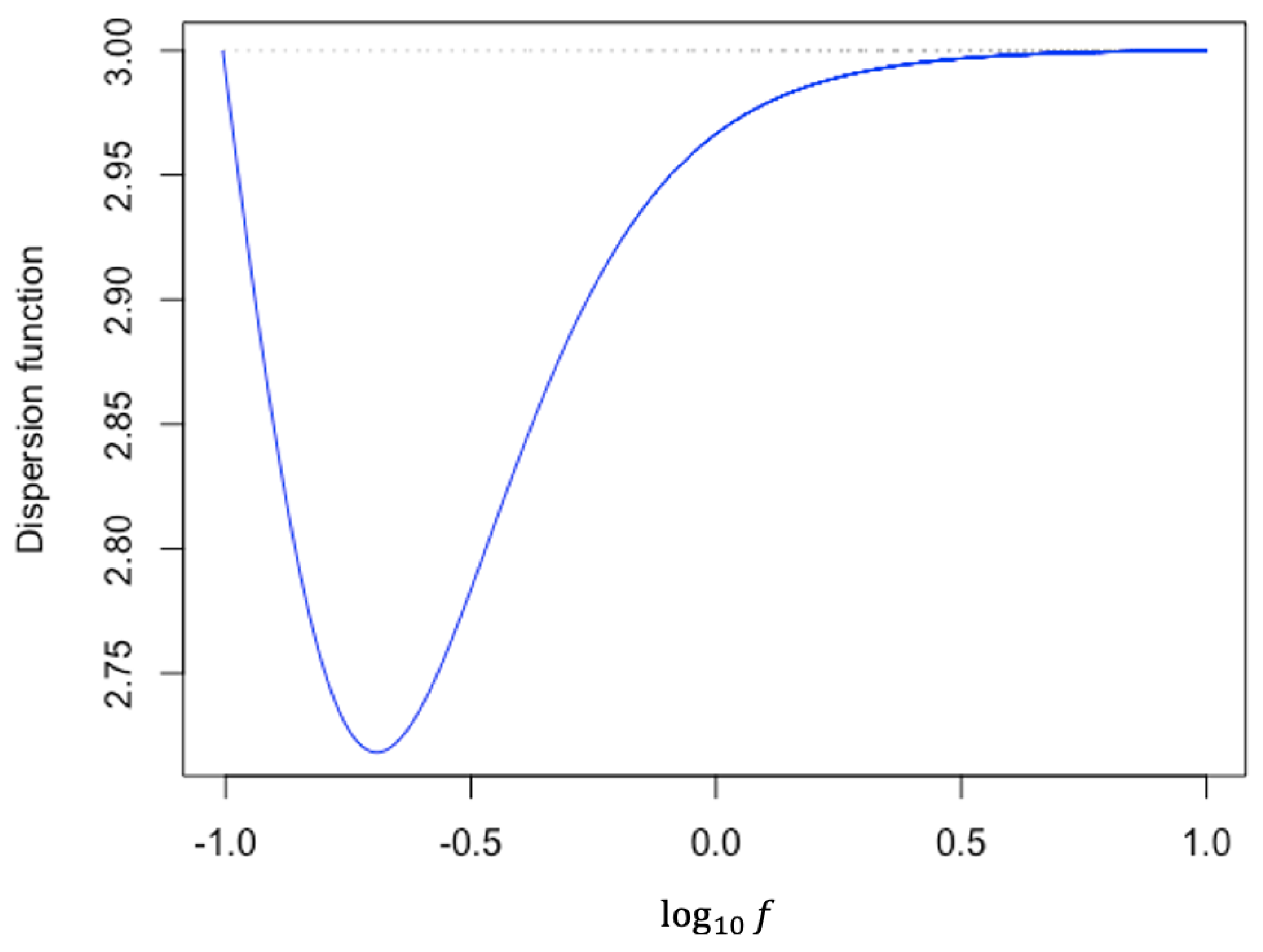
The dispersion function (
20), shown in
Figure 5, reaches the maximums at the support points (that is, the extremes of the interval) and remains less than 3 (the number of parameters) throughout the design space, so the design obtained is D-optimal.
Figure 6 illustrates the support points of the D-optimal designs obtained with
after executing the algorithms and the classic design.
Table 2 shows the values of the D-optimal criterion (
19) for the designs obtained from REX, KL and classical. It is observed that the values obtained with the algorithms are greater than the value obtained with the classical design, therefore, the value of the D-optimal criterion has been maximized. Optimal designs are an interesting tool to measure the value of an experimental design, through efficiency. This efficiency is the percentage of observations that the optimal design would need to achieve the precision of the experimental design being compared. The efficiency (
22) of the classic design is also presented in
Table 2. This shows how the same information can be obtained by reducing the number of experimental conditions by using optimal inputs.
Finally, a sensitivity study has been performed by analysing the fluctuations of the efficiency values against the initial variations of the parameters. In particular, each initial parameter was modified by
of the real values. The efficiencies of the designs obtained have been calculated in relation to the
possible designs. For all cases, as can be seen from
Figure 7, the efficiency for both REX and the KL was never lower than
and higher than
for most variations.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}