1. Introduction
Over the past few years, as robot technology has been leaping forward, the application of robots is booming. In addition to manufacturing, robots have also been extensively adopted in several fields (i.e., disaster rescue, military, and aerospace). In simple structured scenarios, robots have been able to work autonomously. However, for sophisticated and unknown unstructured scenarios, robots still have not achieved complete autonomy, and their operation mode is still determined by human–computer interaction (HCI) based teleoperation technology. This technology exhibits the advantage that the master operator is capable of integrating the operator’s intention into the real-time control of the robot. Such a teleoperation control technology that combines human intelligence can enhance the operation ability exhibited by robots in a sophisticated and unknown unstructured environment. By exploiting this technology, robots can perform dangerous tasks under the command of humans, such as armed reconnaissance missions. Such tasks are generally performed by a mobile robot equipped with a multi-degree of freedom (DOF) manipulator [
1] and one or more hand–eye cameras. The success of such tasks depends largely on the accuracy and stability of the operator’s remote control of the manipulator.
The core of teleoperation is to generate the desired trajectory through an HCI device, then send the trajectory wirelessly to the robot, and make the manipulator track the desired trajectory through a trajectory tracking controller. Throughout the research over the past few years, the design of trajectory tracking controllers for robotic manipulators has been extensively conducted.
The common methods of designing trajectory tracking controller include computed torque control (CTC) [
2], optimal control (OC) [
3,
4,
5], model predictive control (MPC) [
6], fuzzy control (FC) [
7,
8], sliding mode control (SMC) [
9,
10] and so on.
The CTC requires an accurate robot dynamic model, and its control accuracy is determined by the accuracy of the model [
2]. The OC, which also needs an accurate model, aims to seek a control strategy under given constraints to maximize (or minimize) a given prescribed performance [
3]. The control output of MPC is determined by online solving a finite time domain open-loop optimal control problem in the next N time steps at the respective time step [
6], which will lead to large computational costs [
11,
12,
13,
14], thereby causing poor real-time performance. The control effect depends on solving the optimal solution of the error between the predicted trajectory and the reference trajectory in the next N time steps, which implies that MPC is only suitable for the setpoint tracking scenarios not for the teleoperation scenarios [
14]. The FC has a sophisticated design, especially when the system complexity is noticeably high, the appropriate membership function and fuzzy rules are difficult to determine [
15,
16], and there are difficulties in analyzing the structural properties of FC, including stability, controllability, and robustness [
8].
In practical applications, due to the uncertainty of modeling error, internal friction, and time-varying external disturbance, it is generally impossible to obtain a completely accurate robot dynamic model. Therefore, it is difficult to obtain the desired tracking effect by directly using the above methods. Therefore, some methods, such as adaptive control [
17], robust control [
18], and sliding mode control (SMC) [
9,
19], study how to make the control performance meet the requirements when the model is inaccurate. Among these methods, SMC [
20,
21,
22,
23] has aroused considerable attention in the fields of robotic control for its fast transient response and robustness against uncertainties and disturbances. As indicated from the mentioned literature, SMC exhibits the advantage that it enables the system state to efficiently approach the equilibrium state in a limited time, even when the initial state is far away from the equilibrium.
Some research focuses on designing uncertainty compensation or disturbance estimator and realizing trajectory tracking control by combining with the above control methods. To remedy modeling uncertainties and external disturbances, in [
24], a fuzzy compensator is employed in the CTC to achieve the trajectory tracking of a 3-joint manipulator. In [
25] an extended state observer is adopted to estimate structured and unstructured uncertainties and is effectively applied to the trajectory tracking of a 2-joint manipulator. The work of [
26] proposes a novel CTC control system for a 7-DOF robot, in which a Radial Basis Function (RBF) neural network compensator is introduced to the CTC to remedy the system error attributed to the imprecision of the model. The work of [
7] formulates a control strategy of the CTC plus fuzzy compensation by exploiting an adaptive fuzzy logic system to remedy the uncertain part of the mechanical model of a 7-DOF picking manipulator. The work of [
27] develops a novel anti-disturbance tracking controller for a class of Multiple Input Multiple Output (MIMO) systems under unknown disturbances and nonlinear dynamics, in which T–S fuzzy models were designed to estimate the unknown nonlinear disturbances. In [
28] an asynchronous fuzzy integral sliding mode control (AFISMC) is proposed to drive the trajectories of the nonlinear Markov jump systems represented by Takagi–Sugeno (T–S) models, which are subject to external noise and matched uncertainties, into the predetermined sliding mode boundary layer in finite time.
For some teleoperation control scenarios where the reference trajectory can be given in advance, such as the teleoperation control of space manipulator, the above methods can meet the requirements. For some other special teleoperation scenarios, such as the HCI-based tele-aiming system of military robots, the operator needs to quickly control the robot to aim at the maneuvering target, and the reference trajectory needs to be changed according to the movement of the maneuvering target in real-time. The trajectory of the maneuvering target cannot be predicted, which also leads to non-uniform and great randomness of this time-varying reference trajectory. Therefore, the control methods that need to give the reference trajectory in advance, such as MPC or OC et al., are generally not suitable for those tele-aiming scenarios.
When the above-mentioned control methods use the HCI device to generate the corresponding time-varying non-uniform maneuvering trajectory, it may cause a large inertial impact force disturbance to the joints of the robot, and therefore causes an instantaneous significant residual between the robot end trajectory and the tele-aiming trajectory. When converted to joint space, this instantaneous large residual dramatically changes the joint reference trajectory and acceleration reference trajectory, thereby generating a large overshoot, which is easy to cause the flutter or instability of the manipulator [
29].
For the above HCI-based tele-aiming scenarios, the observer-based control method is a very promising way to solve this time-varying inertial impact disturbance. For example, the active disturbance rejection control method (ADRC) can treat the modeling uncertainty and this time-varying inertial impact force disturbance as the lumped disturbance, and then estimate and eliminate this lumped disturbance online in real-time through the extended state observer (ESO) [
30,
31,
32,
33,
34,
35,
36].
However, since the conventional ESO is a high-gain observer, its capabilities are intrinsically limited by the presence and severity of high-frequency sensor noise [
37]. In practical robot systems, measurement noise inevitably exists and cannot be ignored. The high gains of the observer amplify the measurement noise and transfer it into the control loop, which may cause a decrease in control quality and even make the control system unstable. In addition, the traditional observers such as ESO, Kalman observer, and sliding mode observer can only adapt to observe one kind of disturbance, such as constant value disturbance or slow time-varying disturbance, and their observation results are usually very accurate without measurement noise. If one tries to use a set of observer coefficients to estimate multiple types of disturbance, the effect will be very poor.
Motivated by the aforementioned problem and the above discussion, in this paper, we propose an HCI-based tele-aiming control system for the ground reconnaissance robot equipped with a multi-degree of freedom reconnaissance system. To control the reconnaissance robot to aim and track the maneuvering target quickly, we designed a multiple-model observer-based active disturbance rejection sliding mode controller for the teleoperation aiming control system by transforming multiple-model Kalman filter technology into extended state observer, which can observe multiple types of disturbance including the inertial impact force disturbance and efficiently eliminate the influence of measurement noise, and achieve stable guidance trajectory tracking when the tele-aiming system is guided by time-varying non-uniform teleoperation.
Compared to previous works, the major contributions of the present study are presented below. (1) The proposed novel multiple-model augmented-state extended Kalman observer (MEKO) can achieve inertial impact force disturbance estimation and noise filtering simultaneously. (2) The proposed observer can estimate multiple types of disturbances, which only needs to determine the parameter range of the observer without adjusting the parameters manually and accordingly. (3) An active disturbance rejection terminal sliding mode tele-aiming control strategy based on MEKO is proposed to efficiently eliminate the instantaneous large residual attributed to inertial impact disturbance and achieve stable maneuvering target tracking when the robot system is controlled by an HCI device that can generate the time-varying maneuvering trajectory.
The rest of this study is organized below. In
Section 2, A brief introduction of the dynamic model of a manipulator-based tele-aiming system is given. In
Section 3, the proposed control strategy is given, consisting of the design of the novel multiple-model augmented-state extended Kalman observer and nonsingular terminal sliding mode controller. In
Section 4, the verification experiments are presented. In
Section 5, the conclusion is drawn.
2. Problem Formulation and Preliminaries
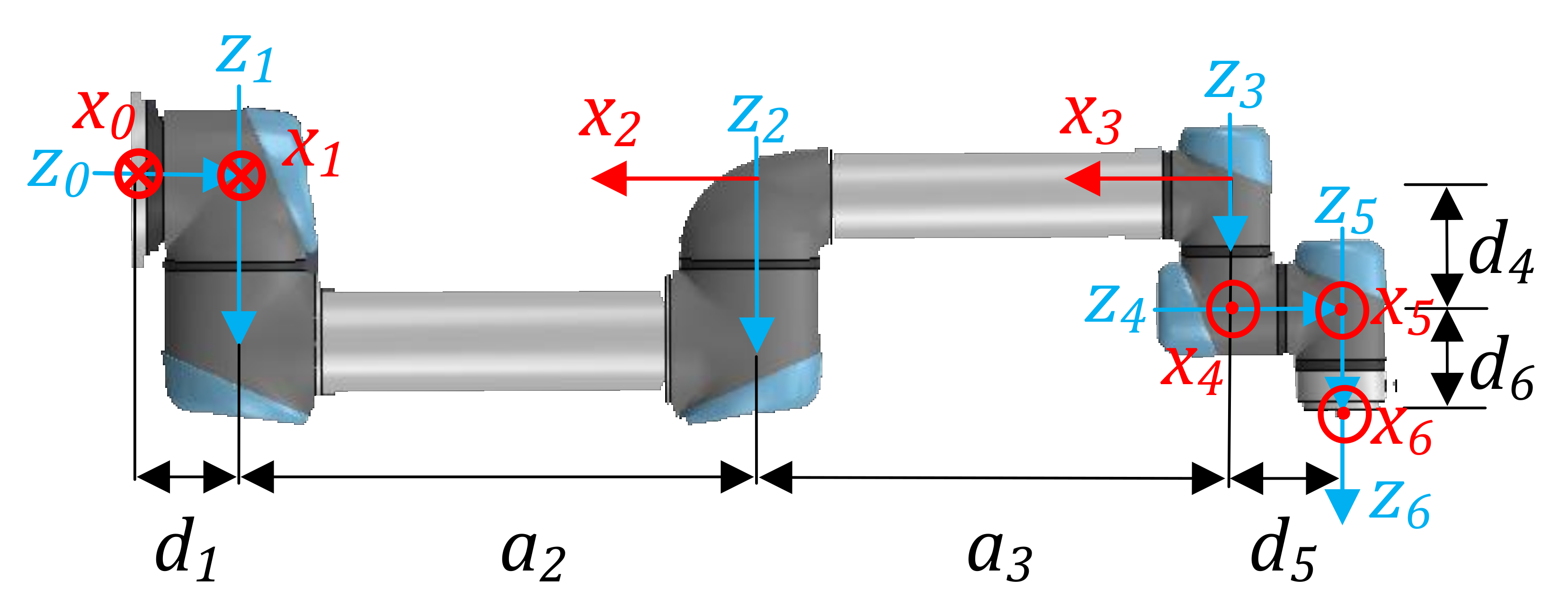
In this paper, we use a multi-degree-of-freedom vehicle-mounted tele-manipulator as the control object of the tele-aiming system, in which a camera is installed at the end of the tele-manipulator, and the camera image can be sent to the monitor through wireless image transmission equipment. According to the movement of the maneuvering target displayed in the monitoring video, the operator quickly controls the HCI device to generate the corresponding time-varying trajectory to control the tele-manipulator. For a rigid n-degree-of-freedom tele-manipulator, its dynamic equation can be expressed as:
where
denotes the joint angle, velocity, and acceleration, respectively;
denotes the inertia matrix;
denotes the nonlinear Coriolis and centrifugal force;
represents gravity;
is friction;
is external disturbance;
expresses the joint torque.
In practical applications, accurate robot model information is usually difficult to obtain, whereas only the nominal robot model can be acquired. The nominal model of the tele-manipulator is assumed as
. Setting
and combining with the kinetic equation, we can get:
Accordingly,
where
represents the unmodeled term, friction, and unknown disturbance of the tele-manipulator, as expressed below:
.
If
is defined, we can get the state-space equation by rewriting the above equation:
where
y is the measurement value of joint angle, and
is the measurement noise;
In addition, we design a saturation function to prevent the joint torque
u from exceeding the upper or lower limit, which is shown as follows:
where
and
are the upper limit value and the lower limit value of the joint torque.
To efficiently tele-control the robot to aim at the maneuvering target, the operator should efficiently generate the time-varying non-uniform guidance trajectory through an HCI device (e.g., mouse or force feedback handle), and the guidance trajectory will be transformed into the desired joint trajectory corresponding to the joint space through the IK (inverse kinematics algorithm). Lastly, the proposed controller enables the respective joint of the tele-manipulator to track the corresponding joint trajectory, in which the desired joint trajectory includes the desired joint angle , speed and acceleration .
The purpose of the controller designed in this study is to make the joint angle
and speed
track the non-uniform trajectories
and
generated by the HCI device in real-time efficiently, stably, and accurately. The joint position tracking errors and velocity tracking errors are expressed as follows:
Thus, the goal of this study is to design a controller that can make the error expressed by the above equation approach zero efficiently and stably in a limited time.
3. System Design
3.1. Tele-Aiming Robot System Overall Design
The tele-manipulator system, which is the control object of the tele-aiming system studied in this paper, is a highly coupled nonlinear system with multiple inputs and multiple outputs. Accordingly, when the time-varying non-uniform guidance trajectory is applied to the tele-manipulator, each joint of the tele-manipulator also should perform the time-varying non-uniform rapid steering movement. Due to the existence of inertia, each joint of the tele-manipulator will cause inertial impact force disturbance to other joints during rapid steering movement. Since the joints of the tele-manipulator are highly coupled, the whole tele-manipulator may not be able to achieve stable target tracking as impacted by coupling disturbance. To weaken the influence of inertial impact force disturbance and achieve fast time-varying non-uniform target tracking, this study proposes an active disturbance rejection terminal sliding mode guidance controller based on a multiple-model augmented-state extended Kalman observer. The proposed controller can efficiently eliminate the inertial impact force disturbance and achieve stable target tracking when the tele-manipulator is controlled by the tele-aiming control system. The overall structure of the tele-aiming control system is presented in
Figure 1.
According to
Figure 1, to eliminate the coupling inertial impact force disturbance, the multi-input multi-output nonlinear and strong coupling tele-manipulator system is first decoupled into a single-input single-output joint group, and the internal friction, parameter perturbation, modeling error, and other uncertain factors of the joint together with the inertial impact force disturbance are considered as a lumped disturbance. Subsequently, the lumped disturbance is estimated by MEKO. Lastly, the lumped disturbance is eliminated by the active disturbance rejection terminal sliding mode controller, and the respective joint can efficiently, accurately, and stably track the joint trajectory corresponding to the end guidance trajectory, to achieve the fast, stable, and high-precision end guidance control by the HCI device.
To achieve joint decoupling, we define
,
,
,
. For the multi-input multi-output nonlinear affine system expressed by the Equation (
4), a “virtual control variable”:
is introduced in this study, where
, and then the (
4) becomes:
The
i-th joint in the robot system (
4) turns out to be:
where the input of the
i-th joint is
, and its output is
,
is the measurement noise on the corresponding joint channel. Thus, the input
and output
of each joint is a single-input single-output relationship. That is, the relationship between input
and output
of the i-th joint is completely decoupled.
represents the lumped disturbance of the
i-th joint, including the inertial impact force disturbance attributed to rapid maneuvering traction.
The actual control torque
of the tele-manipulator is expressed by the virtual control variable
. To weaken the chattering of the control torque, we carry out a low-pass filter (LPF) on the actual joint torque control sequence, as expressed below:
3.2. MEKO-Based Active Disturbance Rejection Terminal Sliding Mode Controller
To enable the end of n-joint tele-manipulator to aim at the maneuvering target efficiently, the guidance trajectory generated by the HCI device is first converted into joint trajectories by using inverse kinematics. Then, the n-joint tele-manipulator system is decoupled and a single joint trajectory tracking controller is applied to every single joint. To achieve state estimation and disturbance estimation under measurement noises simultaneously, the single joint trajectory tracking controller is designed as an active disturbance rejection terminal sliding mode controller based on MEKO.
Its schematic diagram is presented in
Figure 2. First, the tracking differentiator is adopted to pre-filter the reference joint trajectory and extract its speed information. Next, the MEKO is used to estimate the position, velocity, and disturbance of the respective joint simultaneously. Lastly, the nonsingular terminal sliding mode control algorithm is used to eliminate the disturbance term and drive the joint to track the corresponding trajectory with low chattering and minimum tracking errors. The reference acceleration processed by the recursive average filter (RAF) is used in the nonsingular terminal sliding mode control.
3.3. Tracking Differentiator
To aim at the maneuvering target, the operator generates the guidance trajectory with time-varying, non-uniform, and random abrupt motion characteristics by the HCI device. The guidance trajectory may also exist measurement noise disturbance. To ensure that the tele-manipulator system is capable of tracking the guidance trajectory with measurement noise and abrupt motion, in this study, a tracking differentiator (TD) was adopted to preprocess the reference joint trajectory. The TD is expressed as:
where
and
denote the desired position and velocity of the
i-th joint, respectively,
h is the sampling period, and
is the reference input signal,
represents the parameter of tracking speed,
is the step size different from
h,
is expressed as:
Through Equations (
10) and (
11), the tracking differentiator can efficiently pre-filter the input reference signal
and extract the approximate differential signal simultaneously, even when
is mixed with random offset noise generated by rapid maneuvering.
3.4. Multiple-Model Augmented-State Extended Kalman Observer
When the tele-manipulator is quickly guided by the HCI device, the joints will inertially impact other joints, which will cause instantaneous large residuals between the actual trajectory and the guidance trajectory. After converting to the joint space, such an instantaneous large residual will cause the guidance joint trajectory to vary suddenly, resulting in a sudden increase of the instantaneous tracking error. This inertial impact force disturbance can be considered as lumped disturbance together with internal friction, parameter perturbation, modeling error, and other uncertain factors. If this lumped disturbance can be estimated, it can be eliminated before it adversely affects the tele-aiming system. As we all know, the observer-based control methods can achieve a better control effect by estimating the lumped disturbance with a disturbance observer. To speed up the elimination of instantaneous tracking error, it is usually necessary to increase the observer gain, but this amplifies the measurement noise and may cause the flutter or instability.
In this paper, we propose a novel multiple-model augmented-state extended Kalman observer (MEKO) to achieve lumped disturbance estimation and noise filtering simultaneously. According to the second-order system expressed by (
8),
denotes the partial known model. If
in (
8) is considered as an extended state
and assuming that
is differentiable, and its derivative is bounded, (
8) can be written as:
If
is defined and
is considered as process noise, then (
12) is further rewritten as:
where
.
The above equation can be expressed approximately in discrete form, then we get:
where
is the state vector of the discrete system,
k represents the number of samples,
and
are the uncorrelated process noise and measurement noise.
To estimate the disturbance and filter the measurement noise simultaneously, we propose a novel MEKO based on an extended Kalman observer (EKO). If is defined, EKO can realize state estimation, that is . Its principle is to treat the system modeling error and external disturbance as process noise, then expand it into a new system state and finally estimate it. Its basic principle is the same as that of Luenberger observer and ESO. However, compared with Luenberger observer and ESO, EKO can achieve the optimal estimation under linear minimum variance. In practical application, the external disturbance of the robot system may be a constant disturbance, time-varying disturbance, or instantaneous impact disturbance, which makes it difficult for us to determine the statistical characteristics of disturbance noise.
In this paper, to make the observer adapt to the disturbance noise with different statistical characteristics, the proposed MEKO optimize the weighted value of each observer online by using the estimation of innovation variance, so as to make the MEKO output the optimal disturbance estimation value according to the statistical characteristics of disturbance noise in the preset range. As shown in
Figure 3, the output of the MEKO is the weighted average of a group of EKO outputs.
The convergence proof of EKO (basic observer of MEKO) is given in references [
38,
39], i.e., the EKO can achieve
.
The pseudo-code of MEKO is shown in Algorithm 1 as follows:
| Algorithm 1: Multiple-model augmented-state Extended Kalman Observer (MEKO) |
- 1:
Initialization: sliding window width of innovation sequence: , model number: , process noise variance matrices: , measurement noise variance matrices: , prior error covariance matrices: - 2:
Get the current sampling time: k = 1,2,… - 3:
fordo - 4:
Compute: Jacobian matrix - 5:
- 6:
Predict: prior system state and the prior error covariance - 7:
- 8:
- 9:
Update: Kalman gain - 10:
- 11:
Correct: posterior system state and the posterior error covariance - 12:
- 13:
- 14:
Compute: Innovation and innovation covariance - 15:
if then - 16:
- 17:
else - 18:
for do - 19:
- 20:
end for - 21:
- 22:
end if - 23:
- 24:
end for - 25:
fordo - 26:
- 27:
end for - 28:
|
It can be seen from the above pseudo-code that the weight of each EKO in MEKO is adjusted online according to the optimal estimation of innovation covariance. That is, if the innovation variance of an EKO is smaller, the estimated value of the EKO is accurate, and the weight of the EKO in the bank of EKOs is larger. By automatically adjusting the weights, a bank of EKOs with preset process statistical characteristics can output the optimal observation value in real-time according to the innovation and its covariance.
Strictly speaking, the proposed multiple-model observer-based control method belongs to the scope of data-driven control. The control effect of common data-driven control highly depends on the training data. It learns the controlled object without constraints, and its final learning is uncertain, and its stability cannot be well guaranteed. However, the proposed method does not directly use the input and output data to learn the controlled object or adjust the parameters of the controller, as in reference [
40], but uses the measured output data to adjust the weight of each observer in the multiple-model observer, and finally outputs the lumped disturbance value according to the weighted sum of all observers. Different from the common data-driven methods, our method still belongs to model-based control, but the unmodeled dynamics and external disturbance can be observed in real-time through the data-driven method and eliminated in the subsequent control stage.
3.5. Nonsingular Terminal Sliding Mode Controller
Sliding mode control exhibits the advantages of simple, fast response, and strong robustness to external disturbances, unmodeled dynamics, and parameter perturbation. Compared with linear sliding mode control, terminal sliding mode enhances the convergence characteristics exhibited by the system by adding nonlinear terms into the sliding mode surface. It is characterized by the advantages of fast dynamic response, finite-time convergence, and high steady-state tracking accuracy. To further improve the robustness of the control system, a nonsingular terminal sliding mode control law is added into the nonlinear feedback control in the active disturbance rejection control framework.
First, the trajectory tracking error of
i-th joint is defined as
, and the nonsingular sliding mode surface function is defined as:
where
are positive odd numbers.
The nonsingular terminal sliding mode controller is designed as:
In practical applications, to further suppress chattering, the saturation function
is generally adopted to replace the sign function
in the above equation, and its expression is:
Compared with the conventional sign function, the saturation function can make the system adopt different strategies by complying with the value of sliding mode, i.e., outside the boundary layer , the switching control is adopted to make the system state efficiently tend to slide mode. At the boundary layer , the feedback control is adopted to reduce the chattering attributed to the rapid switching of sliding modes and ensure the function to be constantly at the boundary layer.
Generally, the acceleration signal is obtained by using the second-order difference method. Since the rapid random non-uniform tele-aiming control generates a guidance trajectory with an abrupt signal, the conventional second-order difference method will introduce amplified noise when processing this signal. Accordingly, to reduce the effect of the noise signal in the desired joint acceleration on the joint control, the recursive average filter (RAF) is exploited to process the desired joint acceleration
, as expressed below:
In this study, the MEKO is adopted to achieve the real-time online estimation of system state and lumped disturbance under the measurement noise, i.e.,
. Thus, the trajectory tracking error of the i-th joint is actually
, so the nonsingular terminal sliding mode controller of the
i-th joint under the MEKO is modified as:
where
is the estimated value of nonsingular sliding mode surface function.
To reduce the chatter of the controller’s output signal, we perform a low-pass filter (LPF) on the controller’s output signal before sending it to robot, as expressed below:
3.6. Stability Proof of Closed-Loop Control System
In this paper,
is defined, and
is set as the estimation error of the expanded state. The Lyapunov function of the
i-th joint is taken as
, then the Lyapunov derivative is as follows.
where
.
When
,
, the above equation
, which indicates that the system is stable. As indicated from reference [
21], the sliding mode function
can approach zero in a finite time. It is therefore suggested that the closed-loop control system of the
i-th joint is stable, and the sliding mode surface is reachable.
When the closed-loop control system of each joint can ensure stability and the sliding mode surface can be reached, the closed-loop control system of the robot is also stable, and the sliding mode surface can be reached. In other words, when
t approaches infinity,
s,
e,
approaches zero, i.e.,
. To be specific, the proposed MEKO-based nonsingular terminal sliding mode controller can make (
6) stable to zero.
5. Conclusions
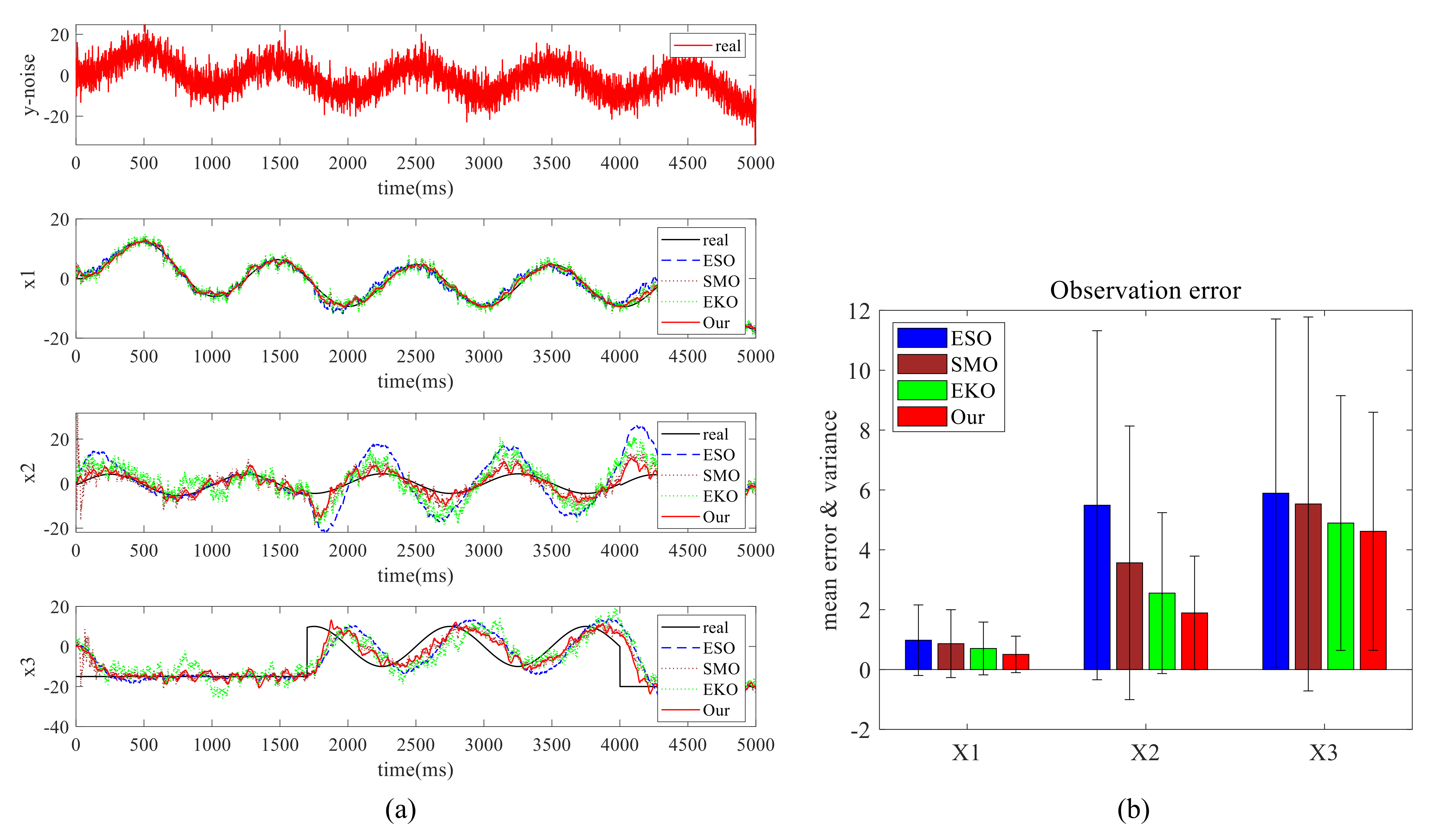
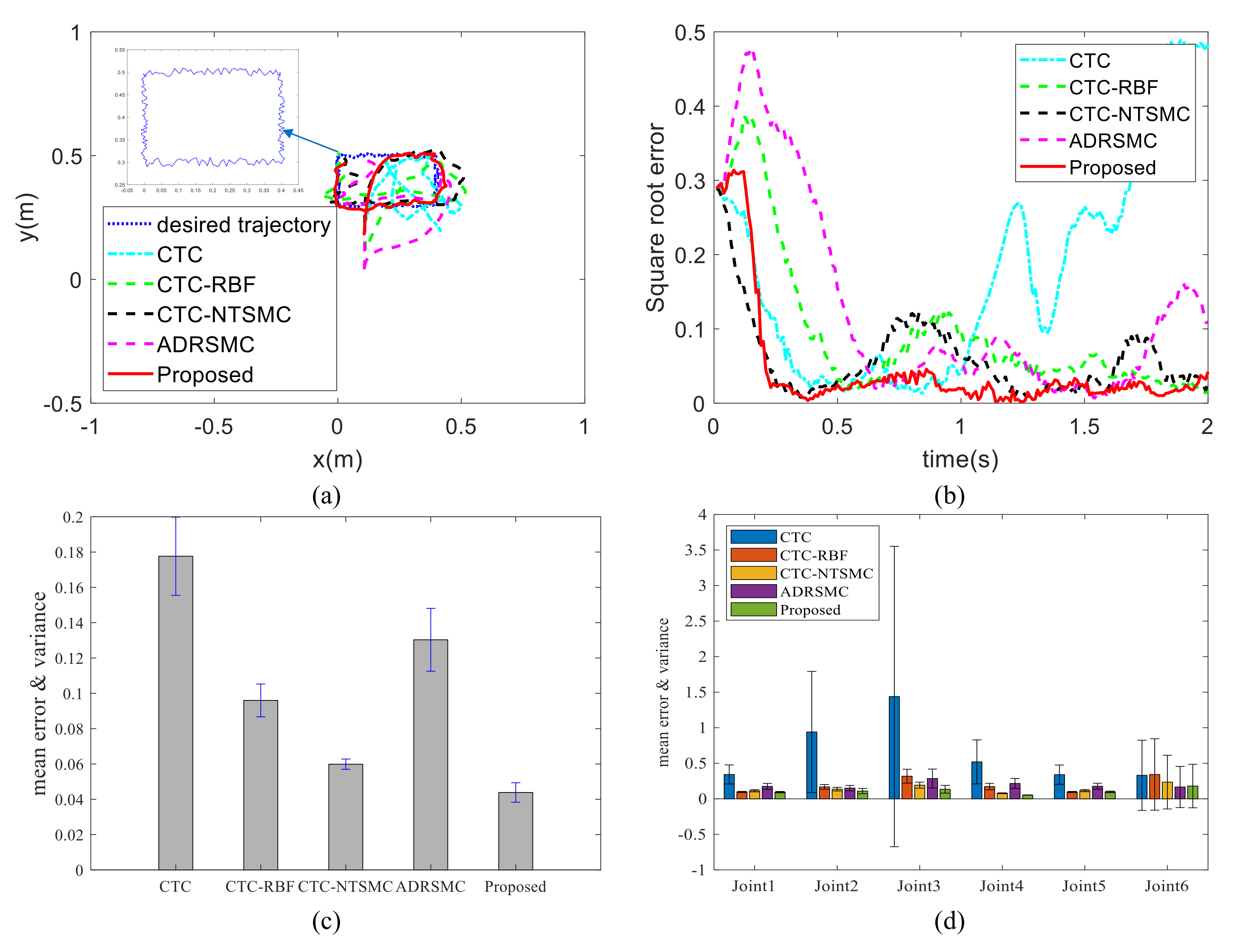
In this study, a maneuvering tele-aiming control strategy is proposed based on a novel multiple-model augmented-state extended Kalman observer (MEKO) and an active disturbance rejection terminal sliding mode controller. The control strategy enables the ground reconnaissance robot to efficiently track the maneuvering trajectory generated by the HCI device even when the robot is accompanied by joint measurement noises. To this end, a novel multiple-model observer is designed, capable of filtering the joint measurement noises and estimating the lumped disturbance simultaneously. Subsequently, a nonsingular terminal sliding mode controller is exploited to eliminate the lumped disturbance and control the robot, as an attempt to efficiently track the maneuvering trajectory. To simulate the maneuvering guidance trajectory, random offset noises are added to the guidance trajectory in the experimental verification part. To simulate the tele-aiming control system of the real robot, some random joint measurement noises are introduced when reading the joint angle. As revealed from the experiment results, the control strategy proposed in this study can endow the robot with the ability to track the maneuvering target stably under the maneuvering tele-aiming control.
Our proposed control method has a wide application background, especially in the field of robot control where the desired trajectory cannot be given in advance, such as in the field of HCI-based robot teleoperation control (ground reconnaissance robots, space manipulators, etc.). If the human traction to the robot is regarded as an external disturbance, our proposed method can also be used to the drag teaching robots.
The basic idea of MEKO is to automatically adjust the weight of each observer through the innovation covariance. Based on this idea, MEKO can output the optimal observation values of disturbance noise with different statistical characteristics in real-time, but MEKO needs to preset the process noise statistical characteristic matrix of each observer, the number of observers, and the length of the innovation sliding window. Therefore, to make up for this deficiency, our follow-up work is to explore the use of heuristic methods to automatically optimize these super parameters.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}