
Stabilization of Stochastic Dynamical Systems of a Random Structure with Markov Switches and Poisson Perturbations
 , , , and
, , , and {kind=link}
{kind=link}
Abstract
:1. Introduction
2. Task Definition
3. Stability in Probability
- for all the discrete Lyapunov operator is defined (7);
- for
- for
- (1)
- Interval lengths do not exceed , i.e.,
- (2)
- (3)
- There exists Lyapunov functions such that the following inequality holds true
4. Stabilization
- (A)
- (B)
- Substitute , and into the functional (18);
- (C)
- Calculate the value of the function (18) by statistical modeling (Monte Carlo);
- (D)
- The problem of choosing the functional , which determines the estimate and the quality of the process as a strong solution of the SDE (2), is related to the specific features of the problem and the following three conditions can be identified:
- The value of the integral should satisfactorily estimate the computation time spent on generating the control, ;
- The value of the quality functional should satisfactorily estimate the computation time spent on forming the control, ;
- The functional must be such that the solution of the stabilization problem can be constructed.
- 1.
- The sequence of the functions is the Lyapunov functional;
- 2.
- The sequence of r-measured functions-controlis measurable in all arguments where ;
- 3.
- 4.
- The sequence of infinitesimal operators , calculated for , satisfies the condition for
- 5.
- The value of reaches a minimum at , i.e.,
- 6.
- The seriesconverges.
5. Stabilization of Linear Systems
- -
- The case of non-random jumps will be at , i.e.,
- -
- The continuous change in the phase vector means that and (identity -matrix).
6. Stabilization of Autonomous Systems
Small Parameter Method for Solving the Problem of the Optimal Stabilization
- 2.
- 1.
- 2.
- 2.
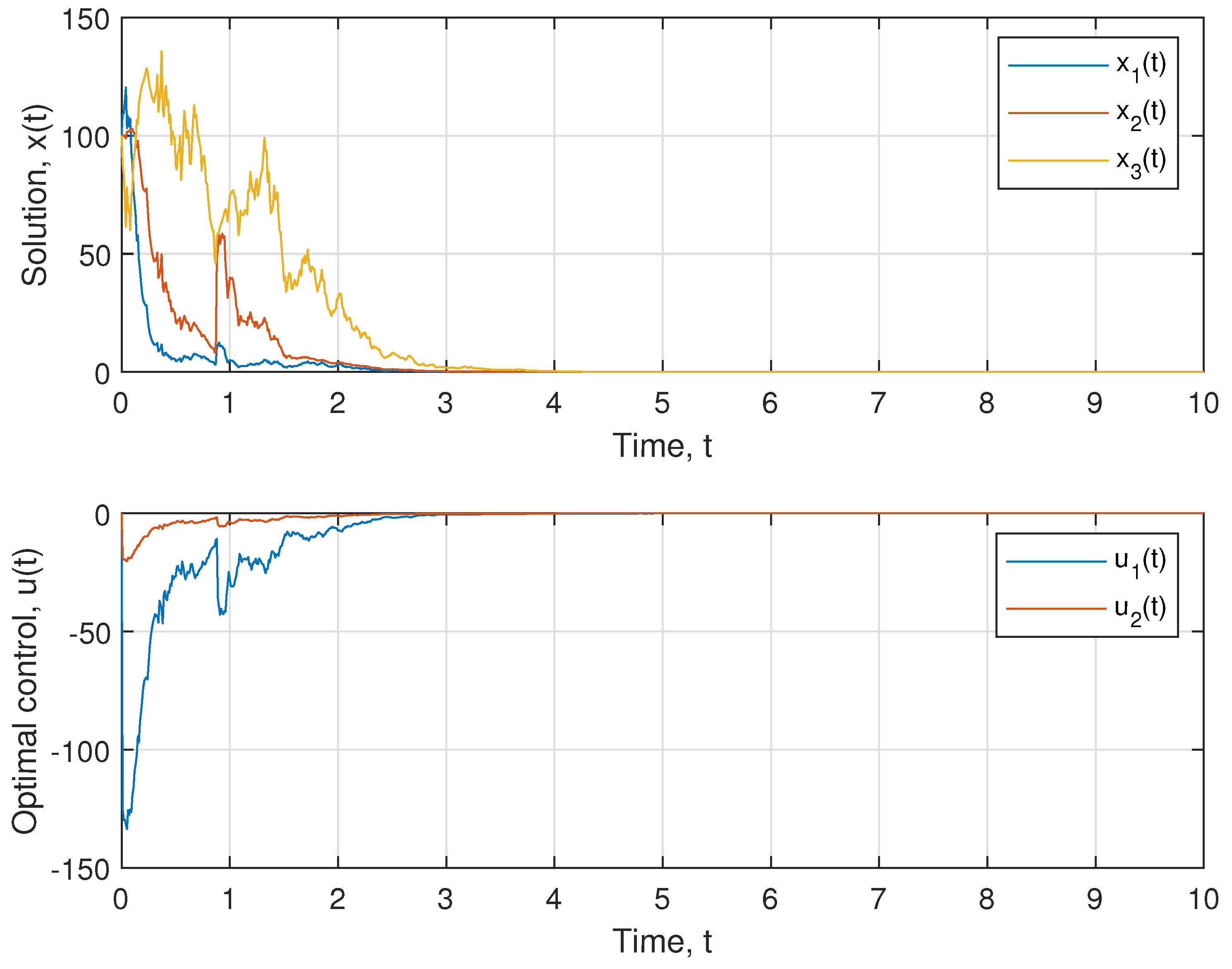
7. Model Example
- The continuous Markov chain is defined by generator
- The values of the function g in the times depend only on the value of x:where . For example, below we use ;
- The intensity of the Poisson process is ;
- The values of the matrices for are
- The values of the matrices for are
- The values of the matrices for are
- The values of the matrices for are
- The control parameters are
8. Discussion
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ODE | ordinary differential equation |
| SDE | stochastic differential equation |
References
- Kats, I.Y. Lyapunov Function Method in Problems of Stability and Stabilization of Random-Structure Systems; Izd. Uralsk. Gosakademii Putei Soobshcheniya: Yekaterinburg, Russia, 1998. (In Russian) [Google Scholar]
- Tsarkov, Y.F.; Yasinsky, V.K.; Malyk, I.V. Stability in impulsive systems with Markov perturbations in averaging scheme. 2. Averaging principle for impulsive Markov systems and stability analysis based on averaged equations. Cybern. Syst. Anal. 2011, 47, 44–54. [Google Scholar] [CrossRef]
- Oksendal, B. Stochastic Differential Equations; Springer: New York, NY, USA, 2013. [Google Scholar]
- Doob, J.L. Stochastic Processes; Wiley: New York, NY, USA, 1953. [Google Scholar]
- Jacod, J.; Shiryaev, A.N. Limit Theorems for Stochastic Processes. Vols. 1 and 2; Fizmatlit: Moscow, Russia, 1994. (In Russian) [Google Scholar]
- Lukashiv, T.O.; Yurchenko, I.V.; Yasinskii, V.K. Lyapunov function method for investigation of stability of stochastic Ito random-structure systems with impulse Markov switchings. I. General theorems on the stability of stochastic impulse systems. Cybern. Syst. Anal. 2009, 45, 281–290. [Google Scholar]
- Dynkin, E.B. Markov Processes; Academic Press: New York, NY, USA, 1965. [Google Scholar]
- Korolyuk, V.S.; Tsarkov, E.F.; Yasinskii, V.K. Probability, Statistics, and Random Processes. Theory and Computer Practice, Vol. 3, Random Processes. Theory and Computer Practice; Zoloti Lytavry: Chernivtsi, Ukraine, 2009. (In Ukrainian) [Google Scholar]
- Protter, P.E. Stochastic Integration and Differential Equations, 2nd ed.; Springer: New York, NY, USA, 2004. [Google Scholar]
- Koroliouk, V.S.; Samoilenko, I.V. Asymptotic expansion of a functional constructed from a semi-Markov random evolution in the scheme of diffusion approximation. Theory Probab. Math. Stat. 2018, 96, 83–100. [Google Scholar] [CrossRef]
- Tsarkov, Y.F.; Yasinsky, V.K.; Malyk, I.V. Stability in impulsive systems with Markov perturbations in averaging scheme. I. Averaging principle for impulsive Markov systems. Cybern. Syst. Anal. 2010, 46, 975–985. [Google Scholar] [CrossRef]
- Koroliuk, V.S.; Limnios, N. Stochastic Systems in Merging Phase Space; World Scientific Publishing Company: Singapore, 2005. [Google Scholar]
- Lukashiv, T.O.; Malyk, I.V. Stability of controlled stochastic dynamic systems of random structure with Markov switches and Poisson perturbations. Bukovinian Math. J. 2022, 10, 85–99. [Google Scholar] [CrossRef]
- Andreeva, E.A.; Kolmanovskii, V.B.; Shaikhet, L.E. Control of Hereditary Systems; Nauka: Moskow, Russia, 1992. (In Russian) [Google Scholar]
- Vadivel, R.; Ali, M.S.; Alzahranib, F. Robust H∞ synchronization of Markov jump stochastic uncertain neural networks with decentralized event-triggered mechanism. Chin. J. Phys. 2019, 60, 68–87. [Google Scholar] [CrossRef]
- Vadivel, R.; Hammachukiattikul, P.; Zhu, Q.; Gunasekaran, N. Event-triggered synchronization for stochastic delayed neural networks: Passivity and passification case. Asian J. Control. 2022. [Google Scholar] [CrossRef]
- Hasminsky, R.Z. Stability of Systems of Differential Equations under Random Parameter Perturbations; Nauka: Moscow, Russia, 1969. (In Russian) [Google Scholar]
- Skorokhod, A.V. Asymptotic Methods in the Theory of Stochastic Differential Equations; Naukova Dumka: Kyiv, Ukraine, 1987. (In Russian) [Google Scholar]
- Sverdan, M.L.; Tsar’kov, E.F. Stability of Stochastic Impulse Systems; RTU: Riga, Latvia, 1994. (In Russian) [Google Scholar]
- Kloeden, P.E.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer: Berlin, Germany, 1992. [Google Scholar]
- Lukashiv, T. One Form of Lyapunov Operator for Stochastic Dynamic System with Markov Parameters. J. Math. 2016, 2016, 1694935. [Google Scholar] [CrossRef] [Green Version]
- Arioli, G.; Gazzola, F. A new mathematical explanation of what triggered the catastrophic torsional mode of the Tacoma Narrows Bridge. Appl. Math. Model. 2015, 39, 901–912. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lukashiv, T.; Litvinchuk, Y.; Malyk, I.V.; Golebiewska, A.; Nazarov, P.V. Stabilization of Stochastic Dynamical Systems of a Random Structure with Markov Switches and Poisson Perturbations. Mathematics 2023, 11, 582. https://0-doi-org.brum.beds.ac.uk/10.3390/math11030582
Lukashiv T, Litvinchuk Y, Malyk IV, Golebiewska A, Nazarov PV. Stabilization of Stochastic Dynamical Systems of a Random Structure with Markov Switches and Poisson Perturbations. Mathematics. 2023; 11(3):582. https://0-doi-org.brum.beds.ac.uk/10.3390/math11030582
Chicago/Turabian StyleLukashiv, Taras, Yuliia Litvinchuk, Igor V. Malyk, Anna Golebiewska, and Petr V. Nazarov. 2023. "Stabilization of Stochastic Dynamical Systems of a Random Structure with Markov Switches and Poisson Perturbations" Mathematics 11, no. 3: 582. https://0-doi-org.brum.beds.ac.uk/10.3390/math11030582