1. Introduction
Projects are responsible for almost 30% of the world’s economic activity; lots of companies are project-based companies. Nowadays, inadequate management of project overruns is growing. Most companies survive the pain of cost and schedule overruns [
1]. According to a survey by the Master of Project Academy, project schedule delays and project cost overruns account for more than 50% of the issues that organizations face. Because of bad activity duration estimations and activity–worker assignments, cost overruns and delivery delays get out of control [
2]; they are the biggest obstacles to the survival and development of a project-based company. The good news is that a project-cost-management problem with adjustable activity durations has attracted the attention of researchers [
3].
A project duration is the total length of time a specific project takes to complete based on the activity of logical sequences and durations. Activity durations are key factors affecting total cost and project delivering time [
4]. For duration estimations, both industries and academia pay great attention to the problem of how much time to spend on activities. Generally, a duration of an activity is calculated with statistical methods based on the historical data of completed activities [
5]. There are different tools for estimating durations such as three-point estimation, parametric estimation, analogous estimation, and bottom-up estimation methods. Scholars consider uncertainty, risk, labor productivity, and disruptive factors when estimating durations [
6]. Activity durations calculated using the above methods, which are mainly forward methods, that are only based on activity time information, they cannot guarantee to deliver a project with an ideal cost and within the duration requirement.
Furthermore, the following human factors, such as “student syndrome”, “Murphy’s law” and “Parkinson’s law”, make a project delay happen frequently [
7]. People always procrastinate and postpone the task activities, and will not work hard to complete the task until the last moment. When they have enough time to finish one task, they will involuntarily reduce their work efficiency or spend time doing other things, resulting in the waste of project time. Parkinson’s Law incorporates laziness, procrastination, and self-protection against reduced deadlines in the future. Precise and strictly enforced activity-completion-time standards based on preset project goals are an important way to overcome the above human factor deficiencies [
8].
Project worker assignment decisions involve the determination of optimal allocations of workers to activities [
9]. A systems view of worker-assignment problems has been researched [
10] with models such as the multi-task assignment model [
11], task matching model [
12], multi-criteria decision-making model of employee assignment [
13], multi-objective optimization model for task assignment [
14], assignment problem with historical data [
15], maintenance workforce assignment [
16], and multi-skilled personnel assignment problem [
17]. All of them are forward optimization models, these methods are often used to solve assignment plans with the maximum benefit or the minimum cost under the condition that the parameters of the model are known and unchanged. They follow forward optimization methodology, and seek to compute optimal assignment decisions given fixed time parameters matrix. However, in practice, delivery date and total cost are preset and unchangeable. It is not a problem of original optimization, which is given an objective, a set of constraints, and fixed model parameters to pursue an optimal decision with minimum costs, whether the minimum costs are affordable or not. It is an inverse optimal value problem, through reverse thinking, based on reverse optimization of the time parameters of the model, so as to make the optimal solution of the original model as close as possible to the given target value.
An inverse optimization method provides an effective mechanism for transforming system parameters to obtain goals. It can be classified as an inverse optimization problem or an inverse optimal value problem. In an inverse optimization framework, the solution to the problem is known. The unknown are the model parameters. Inverse optimization takes decisions or an ideal objective function value as input and determines an objective, or constraints that render these decisions or an ideal objective function value either approximately or exactly optimal. There are two typical surveys of inverse optimization [
18,
19], which can give us a theory and application framework of inverse optimization methodologies. An inverse optimal value problem is a kind of inverse optimization problem, it determines the reverse-inferred parameters to make the objective function value of the corresponding forward model closest to a desired objective function value [
20]. Li presents an evolutionary algorithm based on dynamic weighted aggregation methods for the multi-criterion inverse optimal-value problem [
20], in order to solve the inverse optimal-value model, complementarity and relaxation conditions of the low-level problems are applied to the high-level problem through a penalty function [
21]. Zhang et al. proposed an inverse optimization method for human error downtime inferring and designed a hybrid single-parent genetic particle algorithm to solve it [
22]. Inverse optimization algorithms can be divided into exact algorithms and intelligent algorithms [
23,
24]. In terms of accurate algorithms, there are mainly bi-level programming methods and penalty function methods. Although the exact solution method can theoretically get optimal solutions, it is only applicable to small-scale problems. Researchers made progress on a single-objective linear programming inverse optimization [
24], nonlinear inverse optimization [
25], partial inverse assignment problem [
26], multi-objective inverse optimization model [
27], data-driven inverse optimization [
28], robust inverse optimization [
29], inverse optimization with noisy data [
30], inverse mixed-integer optimization [
31], and so on. Inverse optimizations related to our research are: inverse optimization for objective selection [
32], inverse optimization for cost functions [
33], inverse optimization for key parameter identification [
34], etc. Algorithms are exact algorithms and intelligent algorithms; exact algorithms are a penalty function method based on a bi-level optimization model [
35] and an evolutionary algorithm [
36]. It needs to be emphasized, that inverse optimization methods have been applied to target management problems [
36]. It also needs to be emphasized, that the tractability of an inverse optimization problem depends on the complexity of the forward model and the desired properties sought in the inverse model. Different problems require different problem characteristics, leading to many different inverse models and corresponding solutions. Different transformation mathematical formulas and algorithms are needed according to mathematical characteristics of forward models.
Existing research on inverse optimization theories and methodologies provides good inspiration for this research. However, the existing literature does not deal with the following requirements of project management: It is necessary to match worker skills to activity requirements; total duration is not a simply addition of all the durations, it is a MAX formula based on the critical path and each activity duration is adjustable. In order to deliver a project with an ideal cost, this research adopts the idea of the inverse optimal value method, driven by an ideal cost for delivering a project, to deduce decisions of worker–activity-duration. Based on a 0–1 mixed-integer nonlinear bi-level programming model with MAX formulas, the leader model pursues delivering a project with a desired cost by the minimum distance between the project cost of a forward problem based on adjusted preferred duration and a desired cost. The follower model minimizes the project cost based on initial durations. A hybrid artificial fish swarm genetic algorithm is used to solve the model.
This research uses an inverse optimal value method, to synchronize and optimize durations and worker assignments to deliver a project with an ideal cost. It provides a new idea and a new method for the worker assignment research It has the following innovation points: (1) This research combines push and pull strategies to make them complement each other to deliver a project within an ideal cost. The push strategy is used to determine original durations, and the pull strategy to give adjusted preferred durations based on an ideal cost. It provides a novel way to solve duration optimization problems driven by a preset value. (2) This research combines a genetic algorithm and an artificial fish algorithm to foster strengths and circumvent weaknesses with considerations of nonlinearity, NP difficulty, and MAX functions. Based on our comparisons, the error rate of the optimal value of the improved algorithm is acceptable.
The structure of this research is as follows. In
Section 1, we give an introduction and review the literature on project worker assignments and inverse optimization problems. In
Section 2, we construct a mathematical model of the inverse optimal value method. In
Section 3, a self-adaptation hybrid artificial fish-swarm genetic algorithm is designed.
Section 4 provides an application example of numerical analysis.
Section 5 concludes the study.
2. Mathematical Formulations
2.1. Analysis of an Inverse Optimal Value Model of Project Activity–Worker Assignment
An inverse optimization method is essentially different from a forward optimization method. A forward optimization method is to find a point in the feasible region of the model under the condition that all resource parameters are fixed, so that the objective function value corresponding to the point is optimal. An inverse optimization method is a logically opposite problem to the forward optimization method. Its main idea is an “inverse” activity, that is, under the condition of knowing a certain criterion (desired solution or objective function value), the activity of making the predetermined criterion becomes the optimal result (optimal solution or optimal objective value) by adjusting the resource parameters within the feasible range. An inverse optimal value method of project activity–worker assignment is an optimization method in which the desired objective function value is known, and the aim is to find new activity durations which can make the desired value the optimal value of the forward model under the new activity durations and new activity–worker assignment themes.
An inverse optimal value method corresponds to a forward optimization model. In a forward model, the parameters in the model remain unchanged, and it is an activity of finding a solution that makes the objective function value optimal in the feasible region. In an inverse optimal value method on the contrary, the desired objective function value is often considered to be the optimal value of the model, by adjusting the parameter to make the desired objective function value optimal. It is an activity of finding the best solution to a problem by working backwards from the desired outcome. It involves starting with the desired result and then working backwards to determine the best way to achieve the desired result.
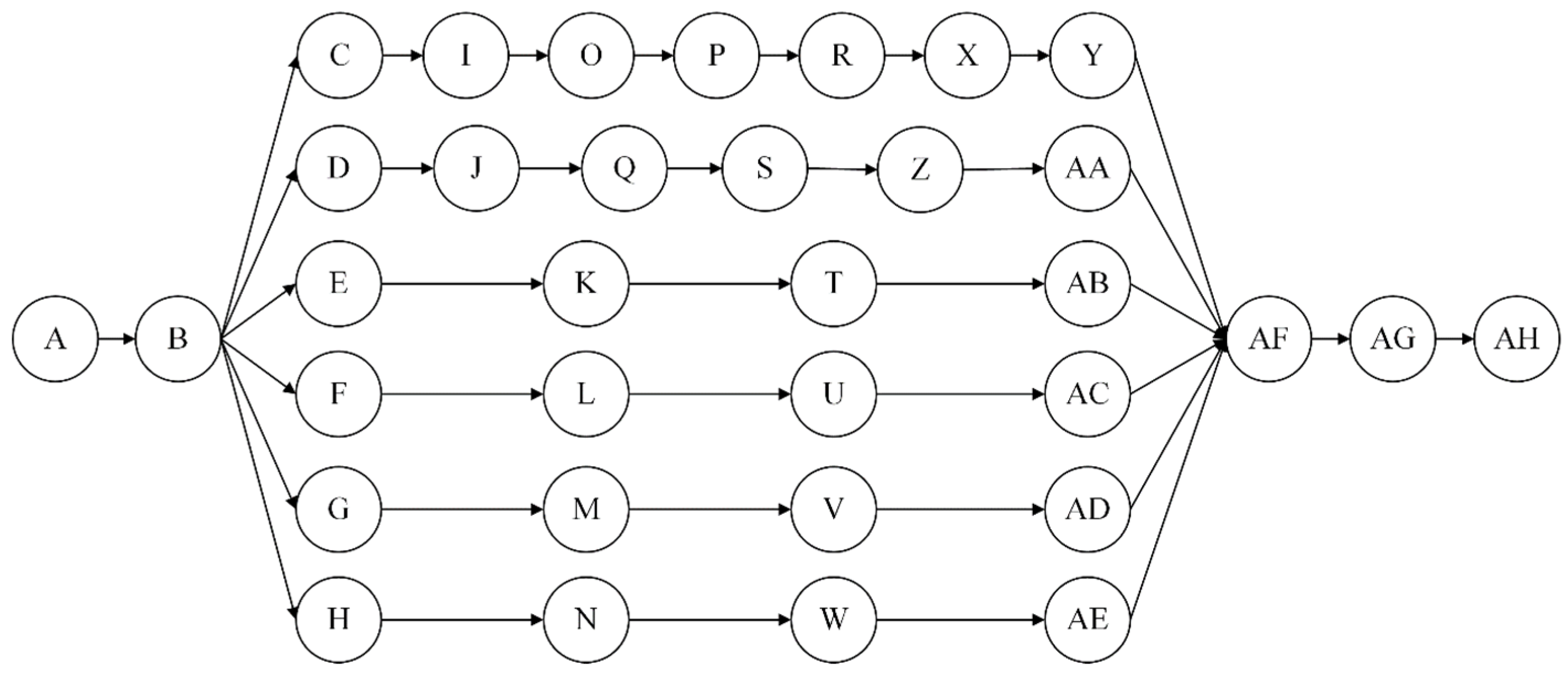
This research defines the “activity–worker” inverse assignment problem as follows: Based on the forward optimization model of “activity–worker” assignment, through reverse thinking, starting from the given target cost, through adjusting activity durations, the aim is to make the optimal objective value of the model the desired value. The “activity–worker” reverse assignment method of a project combines the idea of objective management, a 0–1 integer programming method, and a reverse optimal value method, through the cost objective management of the project, to achieve the goal of controlling the cost, and to obtain the corresponding “activity–worker” assignment scheme. The methodology framework is shown in
Figure 1.
2.2. Problem Description
A project task assignment is the activity of assigning tasks to individuals in order to deliver a project. This type of assignment typically involves assigning specific tasks to individuals, as well as assigning deadlines. It also involves setting expectations for the completion time of each activity, such as the timeline for completion. A forward model is to find worker assignments of a project with constrains of skill matching, labor cost budgets, delivering time requirements, and multi-tasks; the minimum total cost of performing all activities is based on initial durations. However, the optimal objective value is not satisfying, as the duration is adjustable. Then, the goal of an inverse optimal value model is to determine parameters of a forward model that render an ideal cost exactly to be the optimal objective function value with respect to the forward model structure. A desired total cost is treated as an input variable in the inverse optimal value model, and the activity durations and worker assignments are treated as output variables. Decision makers want to deliver a project with a desired cost with some constrains. “Duration–worker–activity” assignment decisions need to be made. Activities of a project have the characteristics of order (order of precedence, parallel), heterogeneity, different durations with different workers, and materials needed are not changeable, whereas duration is changeable. Workers of a project have the characteristics of heterogeneity of skills. Time can be self-controlled within a certain range. A worker with multiple tasks not performed at the same time is determined to show delay tendencies, “student syndrome” et al., which are benchmarking criteria.
2.3. Model Assumptions
By optimizing and adjusting the operation time parameters, the actual total cost of the project is as close as possible to the expected cost target of the enterprise, and the corresponding assignment scheme and operation time parameters are obtained. The model assumptions are as follows: (1) The primary concern of a project-based company is cost; a project must be delivered strictly with a desired cost, the cost must be strictly enforced, and no overspending is allowed. (2) In order to show respect for the workers, each worker reported the estimated working time on each activity prior to the personnel assignment decision. Due to different efficiencies of workers, activity durations of different workers with different activities are different. The above estimated working time on each activity is called initial activity duration. (3) Decision makers give a primary activity–worker assignment theme based on the initial durations with the purpose of minimizing the total cost. (4) For quality control reasons, the materials for a project are beyond the decision scope; decision makers cannot reduce cost from the perspective of materials. (5) Activity durations not only affect total duration of the whole project, but also affect total cost of a project. When the minimum total cost based on the initial durations is higher than the desired cost, it is necessary to readjust activity durations to reduce total cost. (6) For the human-factor reasons mentioned before, activity durations are adjustable [
34]. (7) Due to skill constraints, workers may only be able to complete one or several tasks, or maybe unable to perform tasks because they do not meet the skill requirements.
2.4. Mathematical Symbols
The mathematical symbols and meanings are shown in
Table 1.
2.5. Forward Activity–Duration Assignment Model
In the forward worker-activity assignment model (1), the decisions are activity–worker assignment themes based on the initial activity duration matrixes to pursue the minimum cost of the project.
In model (1): is project duration based on critical path method; is to minimize total cost. is the total labor cost. is the total energy cost. are other costs based on total duration. The constraint formula means the project duration is no longer than the predefined project deliver date. Formula states the total worker cost must be less than a given labor budget. Constraint states each worker satisfies activity skills requirements. Constraint formula means there is no activity with no workers. Constraint formula means if one worker is assigned to multiple tasks, there is no time overlap among those activities.
2.6. Inverse Optimal Value Model of Activity–Worker Assignment with Duration Optimization
An inverse optimization method based on bi-level programming for worker assignment is constructed. The leader model reflects cost orientation and adjustability of activity duration; the follower model reflects the complexity of activity sequence, cost pressure, energy consumption, and environmental protection. Through upper-level and lower-level feedback and interaction of activity duration and worker assignment, the model delivers a project with an ideal cost. The inverse optimization method is more in line with the idea of target management, and can help enterprises achieve the purpose of cost control.
According to the above definition of inverse optimal value problem of project activity–worker assignment, based on a bi-level programming method, the inverse optimal model is proposed (Formula (2)). In the inverse optimal value model (2), the upper model is to pursue delivering a project with desired target cost based on optimization activity durations. The lower level is the forward optimization model of optimizing the “activity–worker” assignment scheme under the original activity duration matrix. Formula (2) is a bi-level nonlinear mixed-integer programming model. The upper-level programming problem is not only related to the upper-level decisions, but also affected by the optimal solution of the lower-level programming problem, and vice versa. Activity-duration decision variables of the upper-level optimization problem interact with the assignment scheme decision variables of the lower-level optimization problem, resulting in mutual feedback, and constant iterating, until “activity-duration-worker” triads are found to make the cost be the desired target cost. The transformation ideas of inverse optimal value method are shown in
Figure 2.
Based on the literature [
21], the inverse optimal value model is as follows:
In model (2) the objective function formula is to minimize the distance between the optimized cost and the desired target cost. The constraint formula means a feasible adjustable region of activity durations. The other formula, that is the follower level model, is exactly the same as the forward model (1).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




