1. Introduction
Renewable energy sources (RES) have earned particular attention in recent decades as a potential solution to the fossil fuels depletion and the forecast of rapid climate change [
1], but current energy systems will not be able to handle future energy demand [
2]. The worldwide energy demand will have increased by about 1.5 times from 2014 to 2040, so carbon dioxide emissions are likely to increase in almost the same measure. Over 47 billion metric tons are expected in 2040 due to the current fossil fuel consumption rate of 82.4 million barrels per day, which is projected to grow exponentially in the coming decades [
3]. In addition, the energy generated from the fossil-based on petrol, coal and natural gas reserves will decrease quickly in the coming decades [
4].
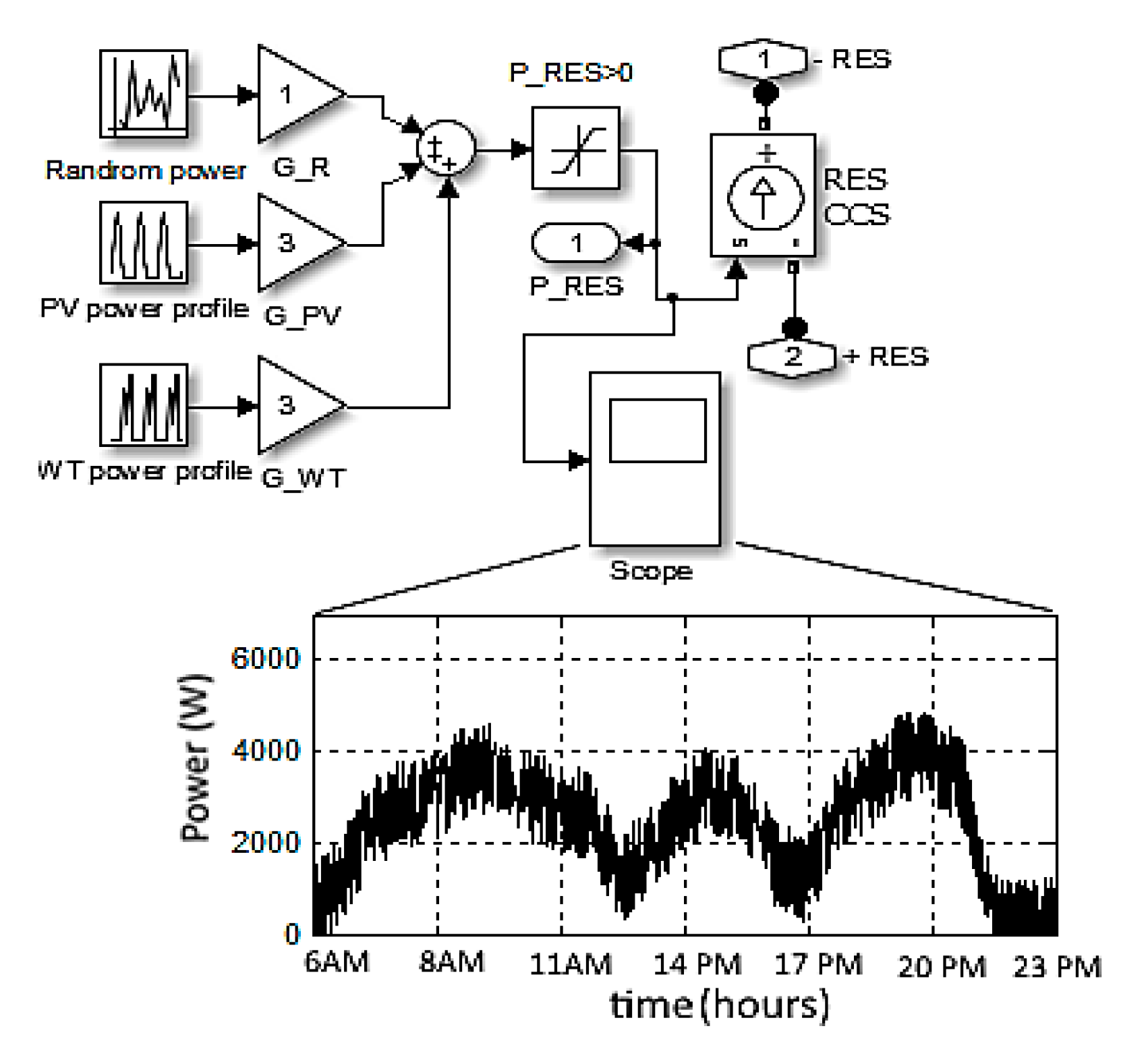
The environment could be better preserved and protected if RES is used in the future for electricity production on a larger scale. Solar and wind energy systems have the following advantages: solar energy is inexhaustible and non-polluting, and has no harmful effects on the atmosphere; wind energy has zero emission of polluting substances. These types of renewable energy sources are inexhaustible and the equipment (such as the photovoltaic (PV) panels, the wind turbines (WT), and the inverters) has a long lifetime and easy maintenance [
5].
The PV/WT Hybrid Power Systems (called RES HPS) along with Energy Storage Systems (ESS) are widely used [
6]. In general, the two energy sources—solar energy and wind energy—are complementary [
7]. By combining two renewable energy sources with ESS, the power-split strategy can optimally ensure the load demand [
8,
9]. The RES HPS design is conditioned by the level of the load demand, implementation costs, required efficiency and polluting emissions [
10,
11].
The optimal design of HPS is a huge task because the optimal configuration depends on the prediction of the energy sources profile based on variable environmental conditions and the load profiles as well [
12]. Studies on modeling, configurations, planning, and optimization techniques of HPS have been conducted for various locations and constraints [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. Autonomous energy systems may contain a conventional energy source (diesel generator) or a Fuel Cell (FC) system as a backup energy source [
28,
29].
Due to polluting emissions, the diesel generator is replaced with the FC system [
29,
30,
31]. This RES/FC HPS is very efficient at low and medium power [
32]. Polymer Electrolyte Membrane FC (PEMFC) stack is used in hybrid systems based on RES due to its advantages vs other types of fuel cells stacks [
33,
34].
One of the most important objectives of any energy management strategy is to minimize the total fuel consumption of the PEMFC stack.
The optimal control of PEMFC hybrid power systems is proposed as the best energy management strategy for fuel economy [
35,
36,
37,
38,
39] based on convex programming [
37] and Pontryagin’s Minimum Principle [
38]. Other studies propose an optimization function as a mix of the FC lifetime and fuel economy [
39]. Techniques to control the DC voltage were studied in [
40,
41].
It is mandatory for a hybrid system to include an ESS which stores the excess energy from the RES in order for it to be used to supply the load during a lack of RES power [
42,
43,
44,
45]. ESS devices are usually batteries and ultracapacitors [
42]. Batteries are used as energy storage devices (having specific energy higher than that of the ultracapacitors), ensuring energy needs are met for a longer period [
43]. The bidirectional power converters control the power flows from the ultracapacitors stack or both batteries and ultracapacitors stacks in the ESS semi-active or active ESS topologies [
44].
It is worth mentioning that many studies on controlling power of renewable hybrid power system have been proposed recently in order to improve the overall performance by appropriate control of the power flows on the DC bus [
46,
47,
48] in comparison with baseline topologies using a FC system as auxiliary energy source [
45]. For example, a two-layer control strategy has been proposed for easy integration of ultracapacitors in a grid connected HPS using a model predictive control of the power flows [
46]. The main drawback of the various control methods related to the need for a complete restructuring of the control system has been highlighted in this study. To solve this issue, a lot of control strategies based on artificial intelligence concepts have been proposed in the literature [
47]. Some of them have been validated in simulation using models available in the literature [
48], included in SimPowerSystems library [
49], or developed based on the bond graph approach [
50], but others have been tested using an experimental setup [
51].
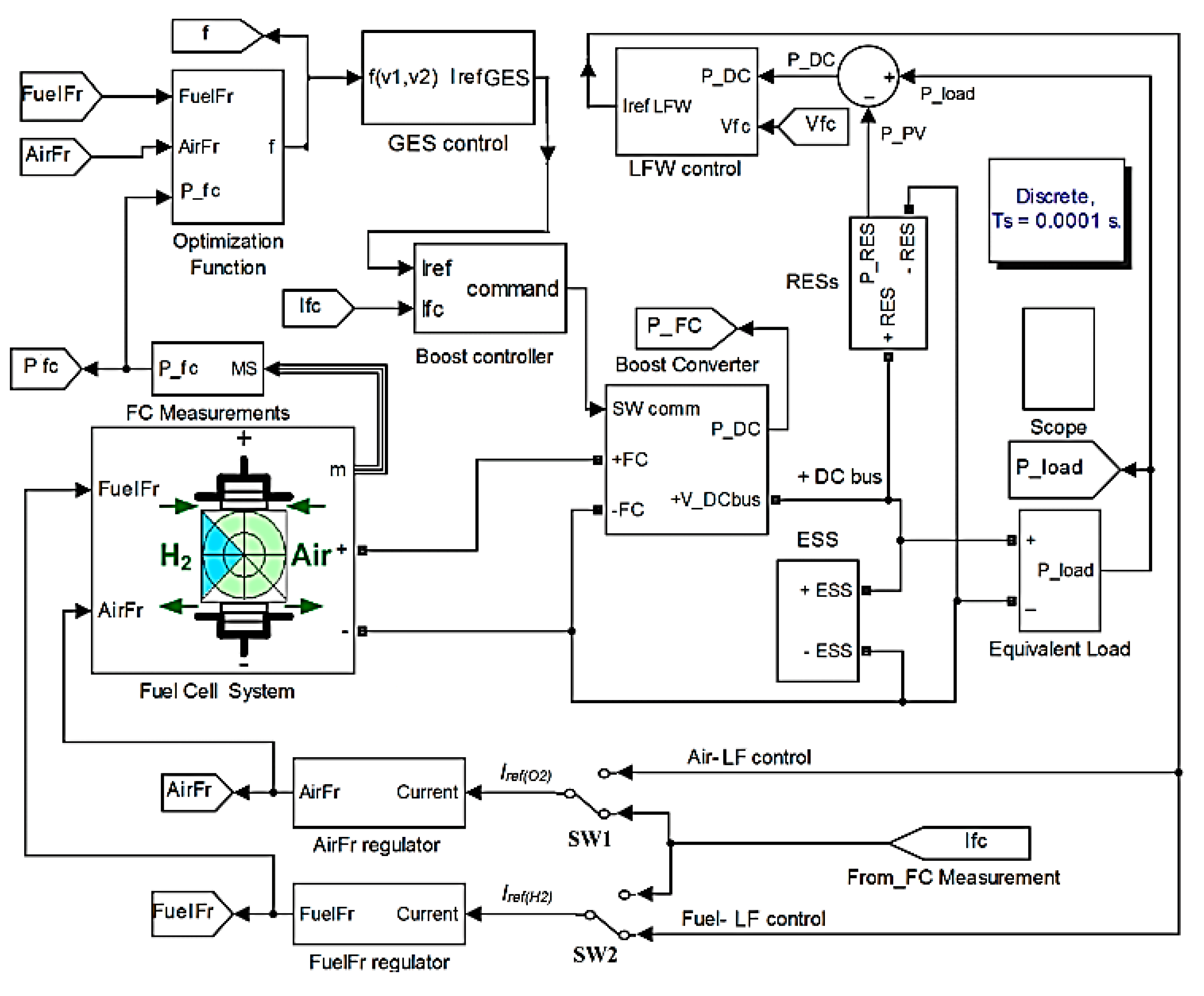
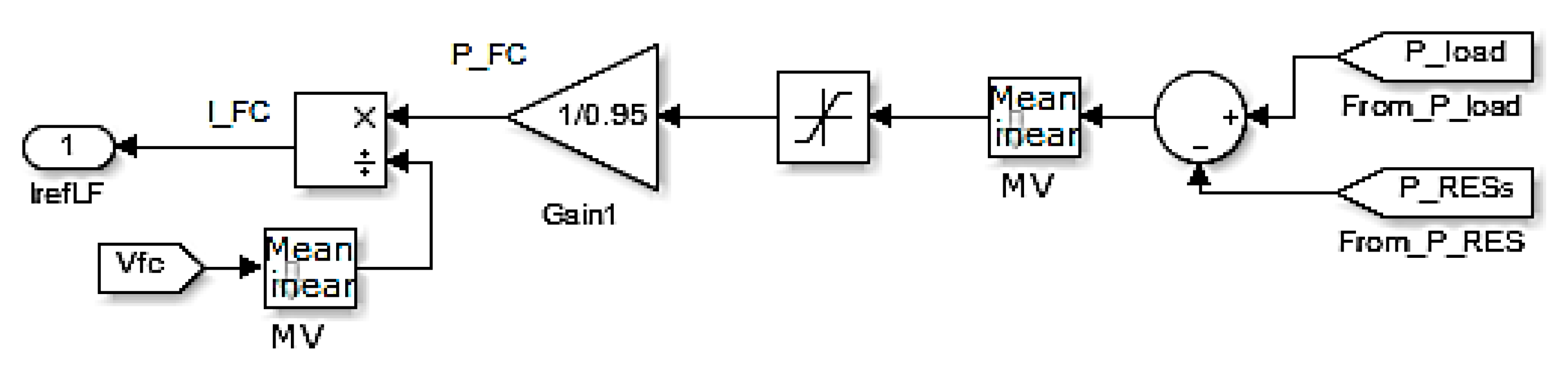
The proposed power-split strategy for the PEMFC/RES HPS is based on Load-Following (LFW) control of needed power on DC bus (pDC), pDC = pload − pRES, where pRES and pLoad are RES power and load demand on the DC bus.
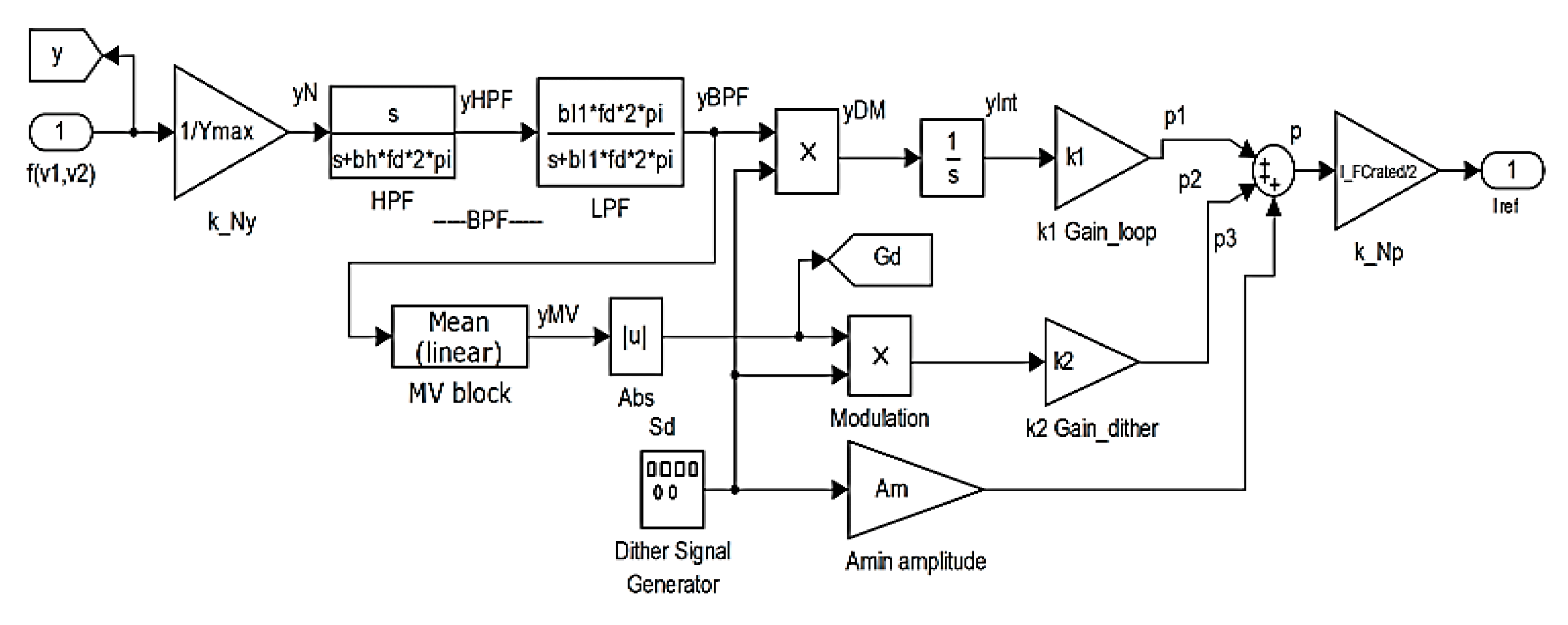
The Extremum Seeking Control (ESC) is proposed here to find the Maximum Power Point (MPP) of the FC net power, which is the Maximum Efficiency Point (MEP) of the FC system. The ESC proposed here is based on the Global Extremum Seeking (GES) scheme [
52], which can find the MEP in real-time. Therefore, the Real-Time Optimization (RTO) loop will optimally operate the PEMFC system.
Two Hybrid Power System (HPS) topologies and their appropriate strategies are proposed in this paper based on LFW control of the air regulator (called Air-LFW-based strategy) and the fuel regulator (called Air-LFW-based strategy).
The novelty and main objectives of this study are as follows: (1) to analyze the behavior of the Air-LFW-based strategy for constant and variable load demand up to 8 kW; (2) to evaluate the fuel economy for Air-LFW-based strategy compared to a reference strategy called the Static Feed-Forward (sFF) strategy [
45]; (3) to improve the fuel economy using a optimization function based on FC net power and efficiency of hydrogen consumption.
Therefore, this study will highlight the fuel economy of the Fuel-LFW-based strategy compared to Air-LFW-based strategy in range of 0.33–1.25% from the rated 6 kW power of the FC system. For example, a fuel economy of 68 liters [l] per minute [lpm] will be obtained under a constant load of 8 kW. Thus, an optimum strategy of fuel consumption can use the Air-LFW and Fuel-LFW strategies for load demand higher and lower respectively than nominal value of 6 kW FC stack.
On the other hand, an optimum strategy of FC energy efficiency can use the Air-LFW strategy and Fuel-LFW strategy for load demand lower and higher respectively than the nominal value of 6 kW FC stack. Therefore, for example, Air-LFW strategy is best for an FC vehicle driving on highway and Fuel-LFW strategy is needed by an FC vehicle climbing a hill.
The aforementioned findings are also sustained by the results obtained by comparing the Air-LFW and Fuel-LFW strategies with the sFF strategy.
This paper is organized as follows: The second section briefly presents the models used in simulation: the fuel cell systems, the energy storage system, the power profile of renewable energy sources, and the equivalent load. The ESC and LFW control loops, the performance indicators, and the optimization function used are also presented in
Section 2. The simulation results are shown in
Section 3 for constant load profile without RES power, constant load profile and same RES power, and variable profiles for both load and RES power flows. The last section concludes the paper.
3. Results
For both Air-LFW and Fuel-LFW strategies the same load profile is used (constant load and variable load profile) to evaluate their performance based on performance indicators mentioned above: [W/lpm], [%], and [l].
3.1. Case Study 1: Constant Load Demand Without Renewable Power Flow
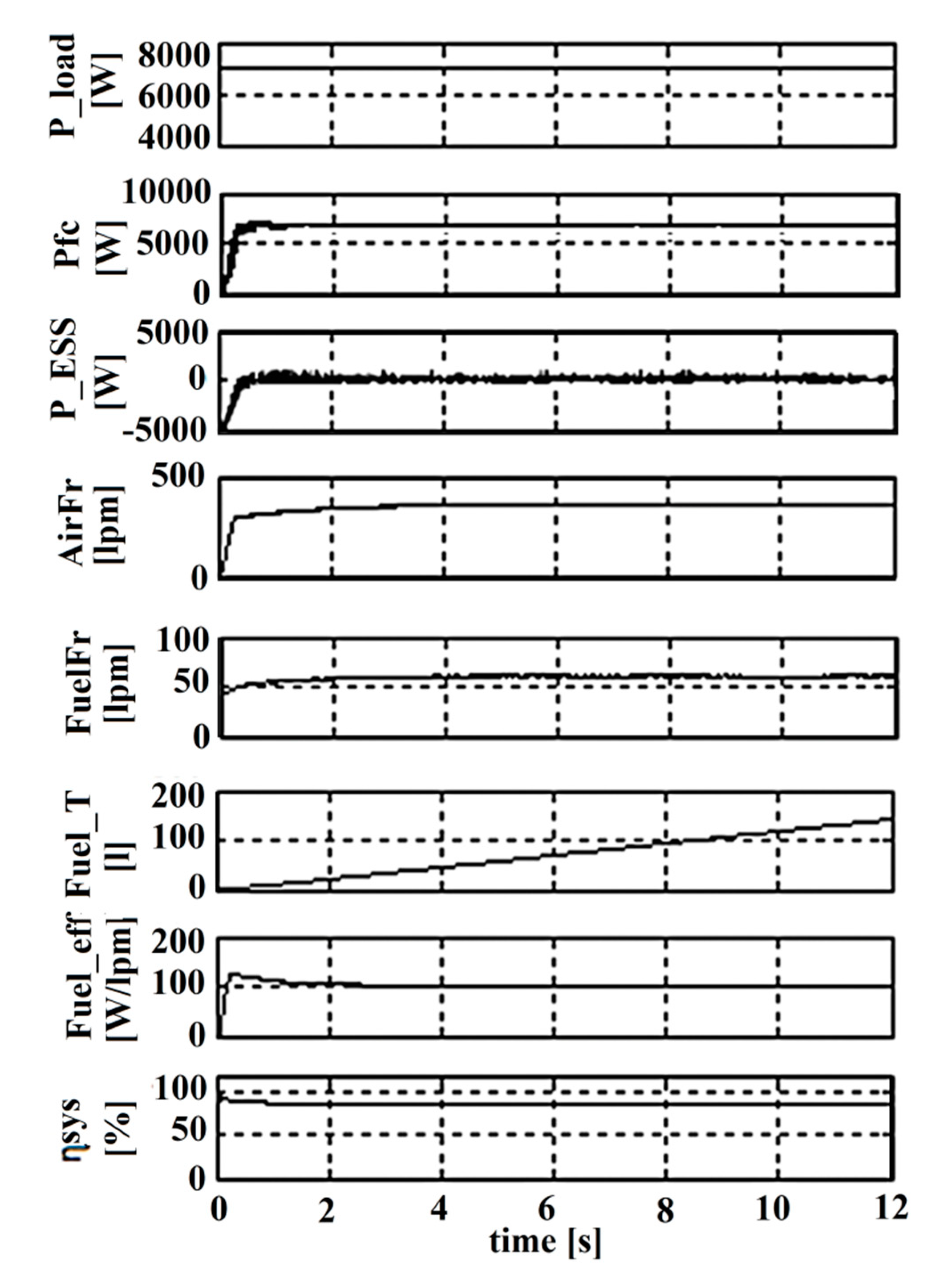
The behavior of the RES/FC HPS operating without RES power under 7 kW constant load power is shown in
Figure 7 using the Fuel-LFW-based strategy. The plots in
Figure 7 are as follows: the first graphic shows the 7 kW load; the second graphic shows the FC net power; the third graphic shows the ESS power; the fueling flow rates (
and AirFr) are illustrated in the next two graphics; the performance indicators (
,
and
are represented in the last three graphics. In case of the Fuel-LFW-based strategy, the results obtained are as follows: FC net power (
) is 6170 W and the fuel flow rates are
= 61.7 lpm and AirFr = 362 lpm; the fuel efficiency, total fuel consumption, and FC system energy efficiency are
= 98,2 W/lpm,
= 150 l,
= 86%.
In the case of the Air-LFW control the results are close to those obtained for Fuel-LFW control (
is 6138 W for
= 64.54 l and AirFr = 390.9 l and the performance indicators
= 96.2 W/lpm,
= 152.3 l, and
= 85.6%), so only the gaps (9) are mentioned in
Table 1 to compare the Air-LFW and Fuel-LFW strategies in Case A (
knet = 0.5,
kfuel = 0).
The LFW control implemented for both Air-LFW and Fuel-LFW topologies forces the battery to operate in charge-sustained mode (see the third graphic in
Figure 7, where
power is approximately zero, except for the start-up phase).
The Air-LFW strategy compared with the Fuel-LFW strategy is better in fuel consumption ( and at maximum load (in range 7.5 kW to 8 kW) and in FC energy efficiency ( and) at light load (up to 4.5 kW and 5.5 kW). Both strategies give appropriate results in nominal range of FC system (around 6 kW load). Thus, an optimum strategy in fuel consumption can use the Air-LFW strategy and Fuel-LFW strategy for load demand higher and lower than nominal value of 6 kW.
On the other hand, an optimum strategy in FC energy efficiency can use the Air-LFW strategy and Fuel-LFW strategy for load demand lower and higher than nominal value of 6 kW. For example, the first optimization strategy is requested by an FC vehicle driving on highway and the second is needed by an FC vehicle climbing a hill.
These conclusions are sustained by the obtained results by comparing the Air-LFW and Fuel-LFW strategies with the sFF strategy (see the gaps in each performance indicator (
) recorded in
Table 2 and
Table 3 in order to compare these strategies at light, nominal and maximum load).
For example, the fuel economies for the Air-LFW strategy compared to sFF strategy are slightly higher and much higher at nominal and maximum load respectively, but lower at light load. On the other hand, the fuel economies for the Fuel-LFW strategy compared to sFF strategy are higher in the full range of load. Thus, the Air-LFW and Fuel-LFW strategies can be used for load demand higher and lower than a threshold around 6 kW. The optimum threshold can be found using a sensitivity analysis of this parameter.
3.2. Case Study 2: Constant Load Demand and Available Renewable Power Flow
The behavior of the RES/FC HPS operating under variable RES power and 7 kW constant load power is shown in
Figure 8 using the Air-LFW-based strategy with optimization function in Case A.
The structure of graphics in
Figure 8 is the same as in
Figure 7 with the exception of a graphic added to show the RES power. The battery still operates in charge-sustained mode due to the LFW control implemented for both topologies (see that the average value for
is approximately zero on the fourth plot of
Figure 8).
The gaps in fuel economy are given in
Table 4 at different
Pload, but same
PRES. The Fuel-LFW strategy compared with the Air-LFW strategy is better in fuel consumption (
for load up to 8 kW (which means in average about 5.8 kW from FC system).
Note that this level was of about 7.5 kW power generated by the FC system without RES power. This means that the Fuel-LFW strategy compared with the Air-LFW strategy is better in fuel consumption for FC power up to nominal FC power, considering the optimization function in Case A: knet = 0.5, kfuel = 0.
In the next section, the optimization function will be considered in Case B and Case C to compare the fuel economy obtained for both strategies.
3.3. Case Study 3: Variable Profiles for Load and Renewable Power Flow
Simulation results for RES/FC HPS under constant and variable load profile and the same RES power were also performed for both strategies, but they were performed in Case B and Case C in order to compare the fuel economy for
kfuel ≠ 0. The results obtained are shown in
Table 5 and
Table 6 for different values of the constant load and average values of the variable load.
The variable load is defined as
Pload(AV), 125%
Pload(AV), and 75%
Pload(AV) for the three steps of 4 s, resulting the average value (
Pload(AV)) mentioned in first column of
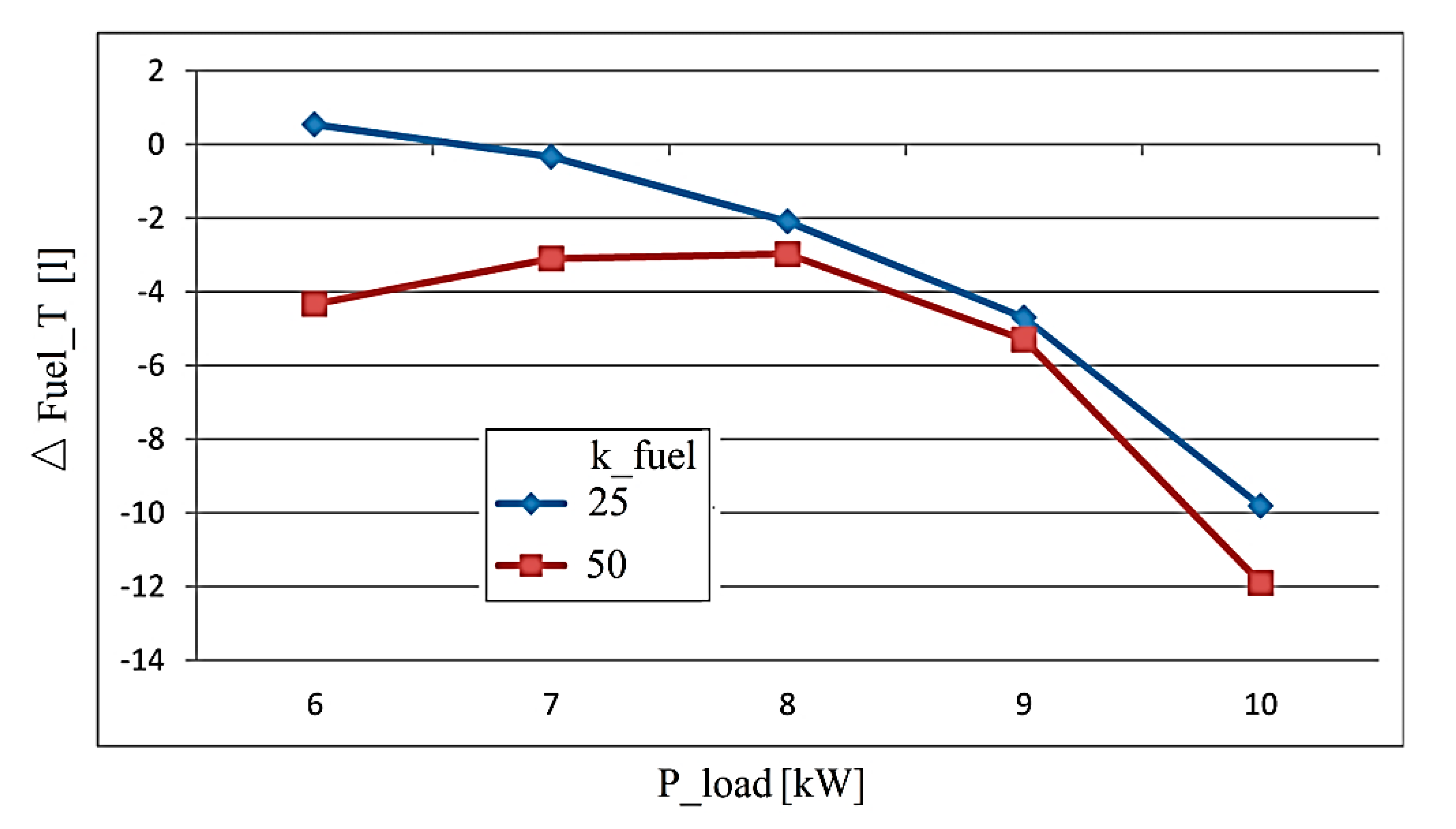
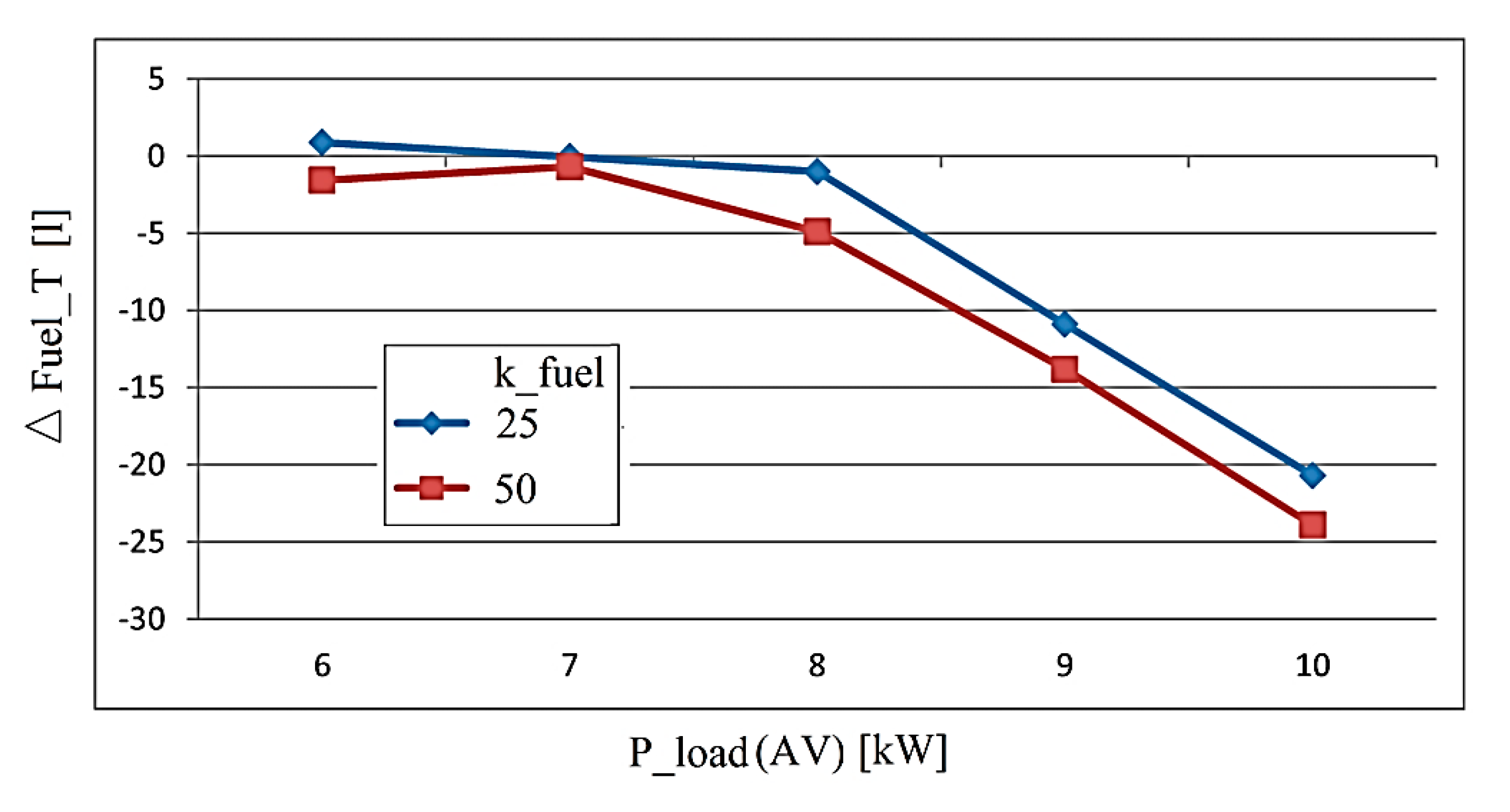
Table 6. The range of load power was chosen considering the RES power range and the range of the FC net power. The gaps in total fuel consumption for different
Pload and
Pload(AV) are represented in
Figure 9 and
Figure 10.
Note the same shape of fuel consumption for kfuel = 25 and kfuel = 50. Additionally, the Air-LFW strategy compared with the Fuel-LFW strategy is better in fuel consumption ( in full load range considered if kfuel = 50. Thus, the Air-LFW strategy improves the fuel economy if the optimization function (9) uses knet = 0.5 and kfuel ≠ 0.
4. Discussion
Compared with the RTO strategies proposed in this study, the rule-based strategies are simple to implement, but these strategies require adjusting the parameters if the requested load varies. For example, the parameters are adjusted using fuzzy-based strategies [
61,
62]. However, it is worth noting that these rule-based strategies cannot guarantee optimality [
63]. In addition, these fuzzy-based strategies are difficult to implement in real-time. Thus, the RTO strategies based on the LFW control of the fueling regulators and fuel optimization using the GES control for searching the optimum (the MEP or the best fuel economy) are proposed.
The research must continue in order to find the simplest strategy to split the power requested on the DC bus (
pDC = pload − pRES) in low and high frequency bands and test where the DC voltage regulation is better to be implemented. The low frequency component of the power requested on the DC bus will be used as input for the LFW control. The low frequency component can be easily obtained using a low-pass filter [
64] in comparison with other more complex techniques based on rules [
65] or artificial intelligence concepts [
66,
67]. In this paper the low frequency component has been obtained via an averaging technique, but the use of low-pass filter with 0.1 Hz cut-off frequency has been tested as well. It is worth mentioning that the use of a lower value for the cut-off frequency will better filter the reference current
IrefLFW (12), but the response time of the LFW control loop will increase as well.
The DC voltage regulation can be performed on the side of the PEMFC system, battery, or ultracapacitors’ stack [
64]. The LFW and optimization loops are implemented at the PEMFC side. Using a semi-active ESS topology, the battery is directly connected to the DC bus. Therefore, the remaining variant is to implement the DC voltage regulation on the ultracapacitors’ side via the bidirectional DC-DC power converter.
The performance obtained with the RTO strategies proposed in this study is compared with those obtained with the sFF strategy [
45] as follows:
The increase in FC system electrical efficiency and fuel economy for the Air-LFW strategy is of 1.61% and 142 lpm for
Pload = 8 kW and
PRES = 0 respectively (see
Table 2);
The increase in FC system electrical efficiency and fuel economy for the Fuel-LFW strategy is of 3.45% and 74.4 lpm for
Pload = 8 kW and
PRES = 0 respectively (see
Table 3).
Thus, the proposed RTO strategies outperform the performance of the sFF strategy in the entire load range for the Air-LFW strategy, and for the Fuel-LFW strategy except in the light load range. It is worth mentioning that the fuel economy increases with the load demand if an optimization strategy is used instead of one without an optimization loop (such as the sFF strategy). This is normal, because more fuel is necessary if the load demand increases and a fuel optimization strategy produces a higher fuel economy for maximum load compared with the case of a light load.
Additionally, the performance obtained with the Air-LFW strategy proposed in this study can be compared with those obtained with the Air-LFW Fuel-GES strategy [
66] (which, besides the GES control for the boost controller, uses a second GES control to search the best fuel economy using the fuel regulator) as follows:
The increase in the FC system’s electrical efficiency and fuel economy using the Air-LFW strategy and the Air-LFW Fuel-GES strategy is (for
Pload = 8 kW and
PRES = 0) of 1.61% and 142 lpm, and 2.13% and 216.7 lpm [
68], respectively;
The increase in fuel economy using the Air-LFW strategy and the Air-LFW Fuel-GES strategy is (for
Pload(AV) = 6.25 kW and
PRES = 0) of 95.5 lpm, and 171.4 lpm [
68], respectively.
Additionally, under 7 kW load, the fuel economy obtained is still high, being of about 8% (=100·12.16/152.3) and 9% (=100·14.46/150) using the Air-LFW and Fuel-LFW strategies. The experimental and simulation studies [
69,
70,
71] validate the aforementioned fuel savings by comparison with a baseline strategy, reporting a fuel economy in the same range, as follows: a fuel economy of 12.36% (=100·(4.47−3.9782)/3.9782) using a hierarchical energy management strategy [
69]; a lower fuel economy of 6.25% (=100·(64.91−61.09)/61.09) using a Kriging-based bi-objective constrained optimization strategy as reported in [
70]; a fuel economy of 8.6% and 13.5% compared with those based on the charge-depletion–charge-sustaining strategy and equivalent consumption minimization strategy have been reported for a multi-objective hierarchical prediction energy management strategy [
71] when the drive cycle is unknown.
Compared with the studies performed in [
72,
73], which maximize the FC net power, this study uses a mixed optimization function
) to increase the fuel economy if k
fuel ≠ 0. It is worth mentioning that the same fuel economy is reported in studies published in recent years [
74,
75], where a fuel economy of 7.8% and 6.8% is reported for instantaneous optimization strategy compared to the efficiency optimization strategy [
74] and a hybrid strategy based on the cost break-even time optimization of a PEMFC/ultracapacitors system [
74], respectively.
The review paper [
76] comparatively analyzes the performance of the latest EMSs proposed in the literature and compares the fuel economy for nine EMSs. The best performance for salp swarm algorithm based on external energy maximization strategy minimum consumed fuel and maximum energy efficiency is of 19.4 gm and 85.61%, respectively. The second strategy identified is the mine-blast optimization based on the ECMS for which the
FuelFr is about 70 lpm. Similar results are obtained in this study for the Air-LFW and Fuel-LFW strategies, where the recorded results are
FuelFr = 64.54 lpm and
FuelFr = 61.7 lpm, and
ηsys = 85.6% and
ηsys = 86%, respectively.
However, the fuel economy can increase if the optimization function is focused to concurrently optimize fuel consumption and PEMFC cell lifetime in a hybrid vehicle [
77]. The fuel consumption increases with 3.6% in order to reduce the PEMFC degradation by 15% using a stochastic dynamic programming strategy.
The variability of REW sources and load demand is managed in this study based on the LFW control of the FC system considered as a backup energy source. If the HPS does not include a backup energy source, then this variability may be managed based on an optimal scheduling problem [
78] considering a sample of minutes during the scheduled period [
79].
Additionally, it is worth mentioning that a better fuel economy is obtained for the Air-LFW strategy compared with the Fuel-LFW strategy because the LFW control loop include the air regulator and fuel regulator and the optimization loop include the fuel regulator and air regulator, respectively. Therefore, the fuel consumption will be minimized by an optimized operation of the fuel regulator in the Air-LFW strategy.
Furthermore, the use of two optimization loops instead of one increases the complexity of implementation, but the direct search with two variables extends the searching space and the global optimum can then be found. Note that an increase of about 12% of the fuel economy can be obtained at maximum load (constant or variable) if a second GES control is implemented.
Consequently, research remains open in proposing advanced fuel economy strategies based on new optimization architectures or better search algorithms. For example, the MPP tracking algorithm based on advanced fractional order incremental conductance techniques [
80] has comparable performance with the MPP tracking algorithm based on the GES control used in this study, but the rules-based strategy used in [
80] is harder to implement. In addition, about 10% FC power ripple is obtained even if a variable step is used for the MPP tracking algorithm. It is worth mentioning that using the MPP tracking algorithm based on the GES control the FC power ripple is almost zero (see the second plot in
Figure 7 and
Figure 8) due to the asymptotical decrease of the sinusoidal dither amplitude during stationary regimes (after the optimum is found). During the searching regime, the amplitude of the sinusoidal dither is higher in order to locate the optimum in less than 15 dither periods (which means less than 150 milliseconds for a 100 Hz sinusoidal dither). This short searching time allows the GES-based MPP tracking algorithm to optimize in real-time the PEMFC operation under variable RES power, maintaining the charge-sustaining mode for the battery (see the third plot in
Figure 8). The ripple on the ESS power appears due to dynamic compensation of the high frequency component of the power requested on the DC bus (
pDC = pload − pRES) by the ultracapacitors’ stack via appropriate control of the bidirectional DC-DC power converter.
As mentioned, the FC system electrical efficiency for the Air-LFW strategy and the Fuel-LFW strategy is of 1.61% and 3.45%, being lower than about 7% electrical efficiency reported in [
81], where the master–slave strategy based on fuzzy logic control and power compensation method is only focused on increasing the electrical efficiency of the PEMFC system. Considering once again the main advantage of the proposed strategies based on a mixed optimization function
) to easily change the optimization objective (which can be the FC net power
maximization if k
fuel = 0 or fuel economy maximization if k
fuel ≠ 0), it is worth mentioning that this feature could be very interesting for implementing in FC vehicles. Safe implementation in FC vehicles can be ensured by 100 A/s slope limiters of the reference currents
and
from the fueling regulators (5–6), which will limit the fueling flow rates
AirFr and
FuelFr, avoiding fuel starvation [
82].
5. Conclusions
Analysis of two RTO strategies (Air-LFW and Fuel-LFW) is performed in this paper for constant load profile without RES power, constant load profile and variable RES power, and variable profile for load and RES power in order to determine which control strategy is more effective.
For constant load profile without RES, the following findings were obtained considering the optimization function in Case A (knet = 0.5, kfuel = 0):
The fuel energy efficiency in the case of the Air-LFW strategy is less dependent on the load level, but in the case of the Fuel-LFW strategy, fuel energy efficiency is more dependent on the level of the load; thus, gaps in fuel energy efficiency result, as in
Table 1.
Compared with the Fuel-LFW strategy, the Air-LFW strategy is better on FC energy efficiency ( and) at light load (up to 4.5 kW and 5.5 kW).
Compared with the Air-LFW strategy, the Fuel-LFW strategy is better on fuel consumption ( ) in almost the full load range (up to 7.5 kW).
As a first conclusion considering the optimization function with knet = 0.5 and kfuel = 0, the Fuel-LFW strategy is the best option to supply the load with the necessary power in an efficient way. Therefore, this strategy can be used for an FC vehicle climbing a hill.
The simulations for a constant load profile and same RES power reveal that the Fuel-LFW strategy compared with the Air-LFW strategy is better in the fuel consumption for FC power up to nominal FC power (6 kW) considering the same optimization function (knet = 0.5, kfuel = 0). Therefore, this can be used for a standalone RES/FC HPS to efficiently supply a residential home in an area where it is easy to refuel the fuel tank.
However, if the fuel tank is limited (see the case of the FC vehicle) or can be refueled only periodically (e.g., chalets and other buildings in mountains) the RTO strategy must be oriented to fuel economy considering the optimization function with kfuel ≠ 0. The results for constant load profile and variable RES power, and variable profile for load and RES power highlighted that Air-LFW strategy is the best option for RES/FC HPS supplying energy for isolated buildings. Additionally, the Air-LFW strategy is the best option for an FC vehicle if fuel economy is selected as the objective by the driver.
Thus, as a second conclusion considering the optimization function with knet = 0.5 and kfuel ≠ 0, the Air-LFW strategy is the best option to efficiently supply the load with minimum fuel consumption.
Considering that the LFW control for RES/FC HPS is appropriately designed, the third conclusion is that the battery will normally operate in charge-sustaining mode for variable profiles of load and RES power. This reduces the battery capacity needed to ensure the power flow balance on the DC bus, and also increases its lifetime due to a limited number of charge-discharge cycles.
However, as mentioned, the charge-discharge cycles can have an effect in some cases, so the battery state of charge must be monitored as well. For example, the battery will operate in charging mode during a light load when the available RES power exceeds the load demand [
83]. In this case, the electrolyzer must be started (when the battery is fully charged) to produce hydrogen (refueling the fuel tank), and avoiding battery overcharging. Additionally, the battery will operate in discharging mode during the peaks of load demand that are higher than the maximum of both FC power and RES power flows available. The design of the RES/FC HPS must avoid deep discharge of the battery and reduce the number of such charge-discharge cycles, but this subject was and will be further discussed in the literature, being outside the aims of this study.
An interesting idea would be to switch the proposed strategies based on load level to maximize the fuel economy for an FC vehicle [
84]. The Fuel-LFW strategy would be used to maximize fuel economy when needed (for example, when the FC vehicle is running on a highway or has to reach the first hydrogen fueling station with what hydrogen is still in the tank). The FC net power optimization strategy (Case A:
knet = 0.5,
kfuel = 0) would be used to maximize the FC power generated on the DC bus in order to increase the available power for the FC vehicle while climbing a steep slope (when fuel economy is no longer a priority). This mode of operation can be performed automatically by using a load threshold or manually at the driver’s request. This could be the subject of further research.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}