Mathematical Modelling, Analysis and Control of a Three to Five-Phase Matrix Converter for Minimal Switching Losses

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
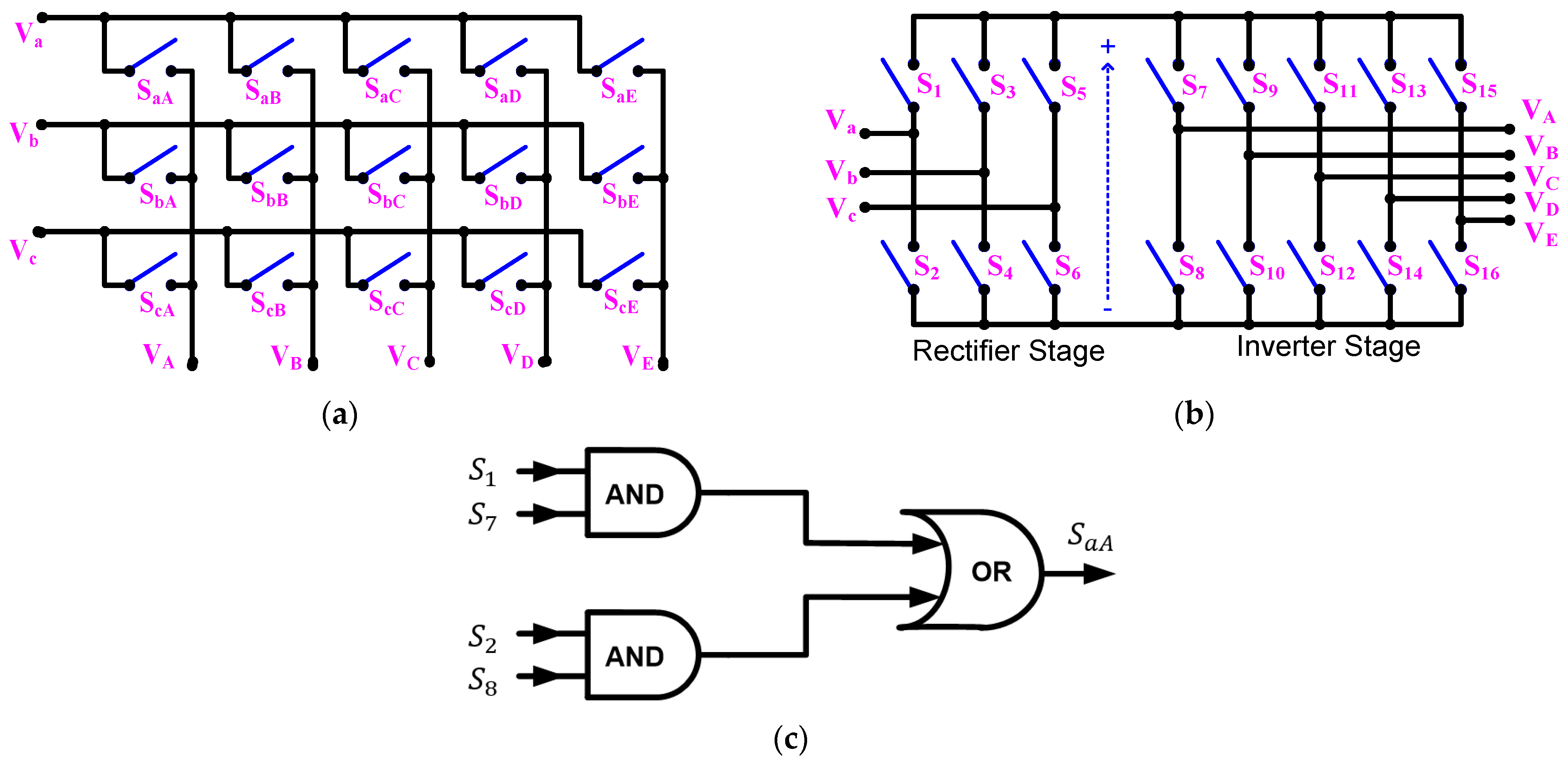
2. Five-Phase Matrix Converter
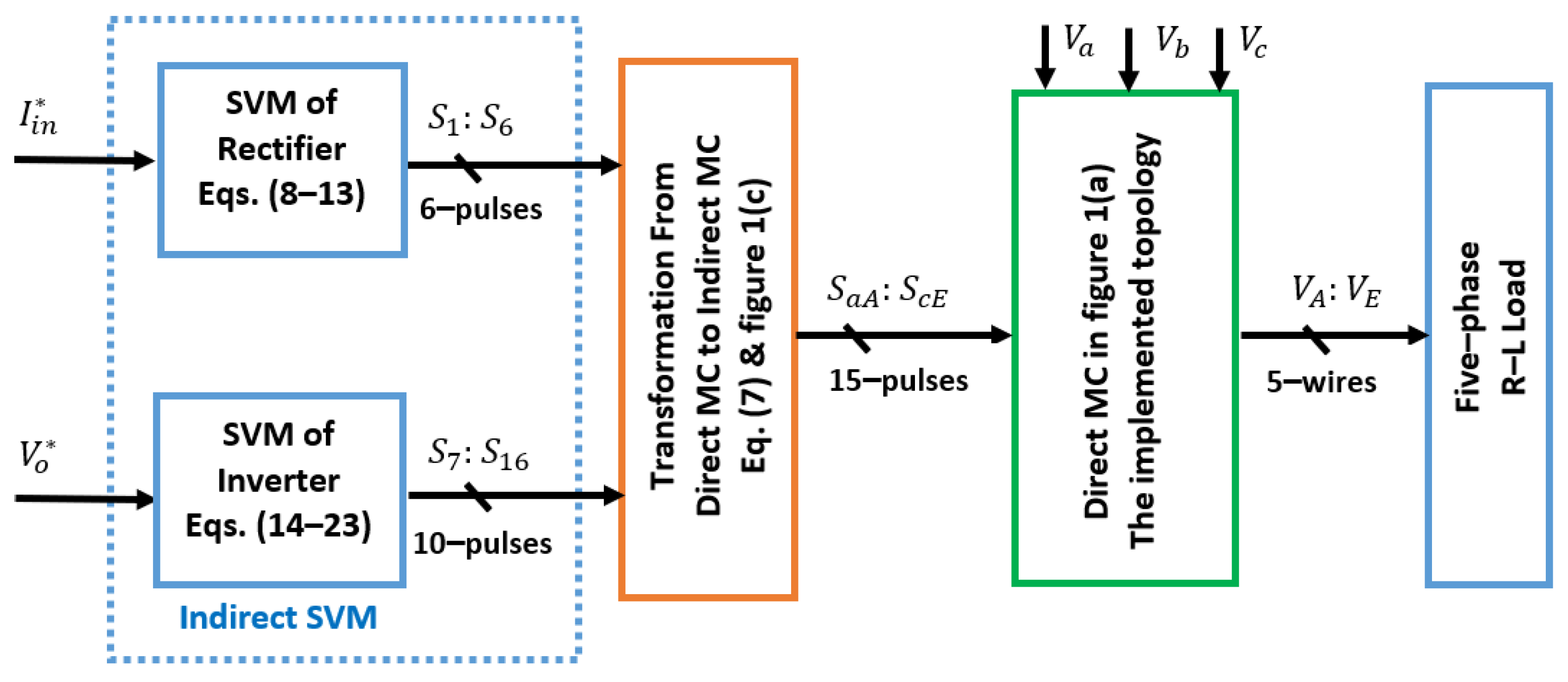
2.1. Direct SVM for a Five-Phase MC
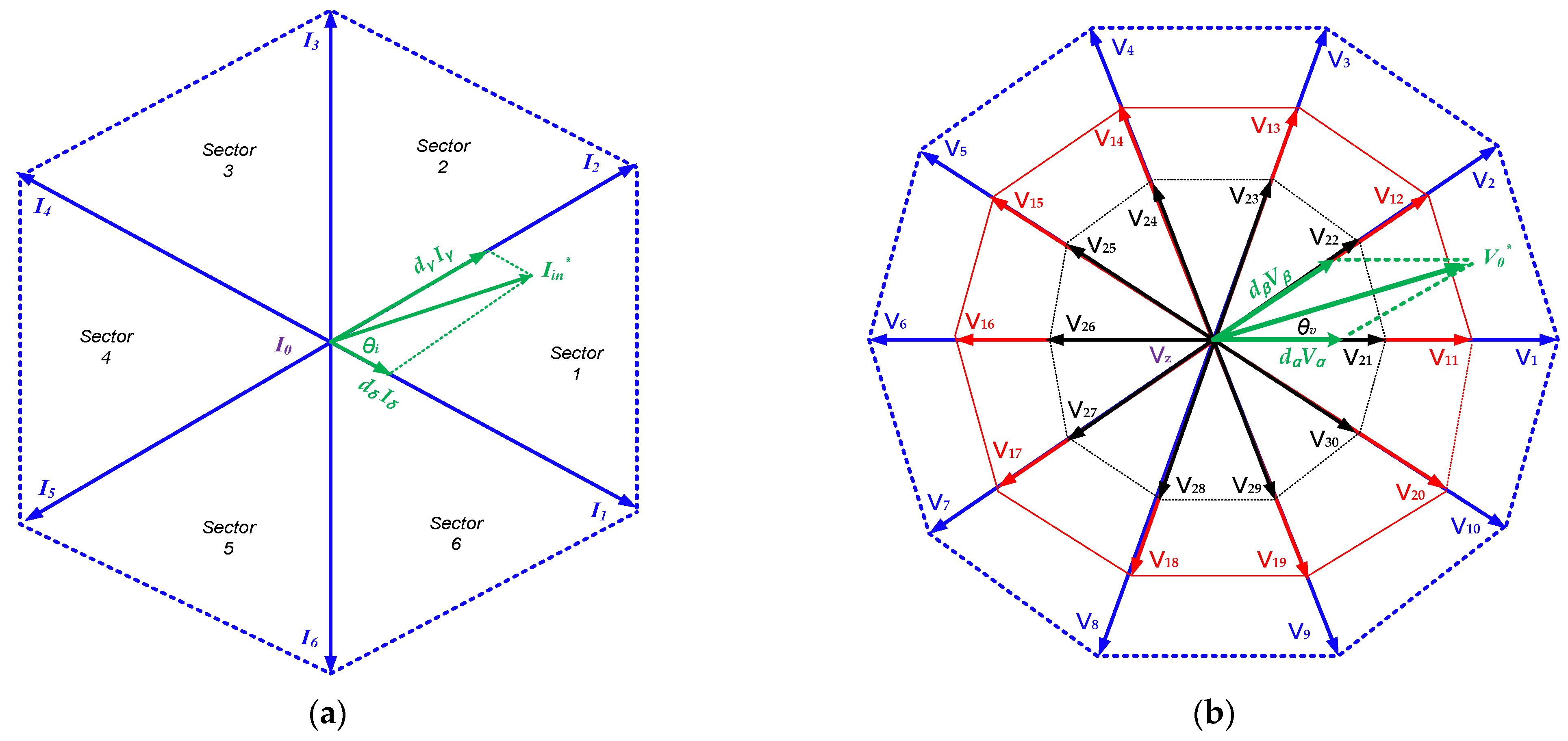
2.2. Indirect SVM for a Five-Phase MC
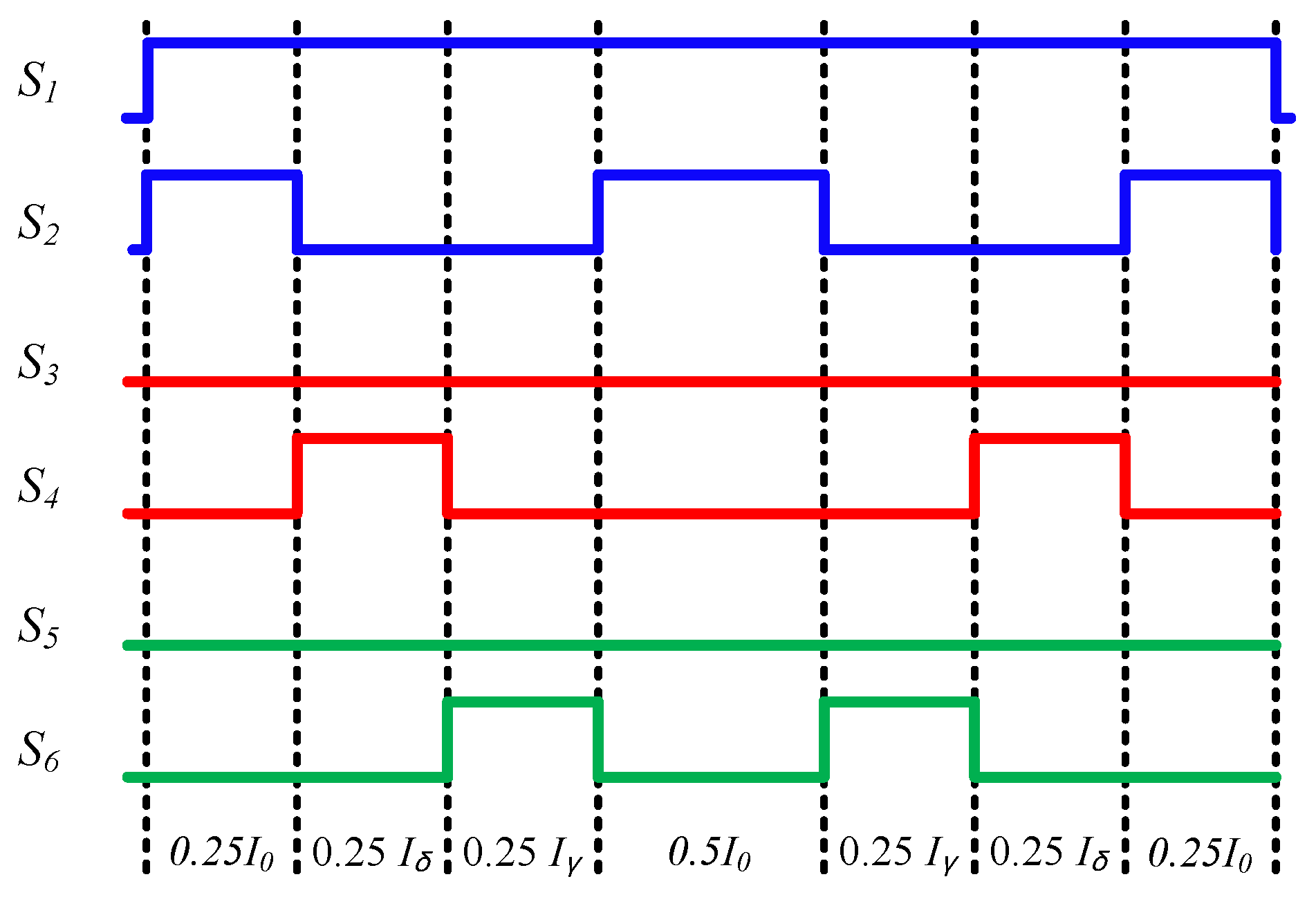
2.2.1. Three-Phase Rectifier Stage
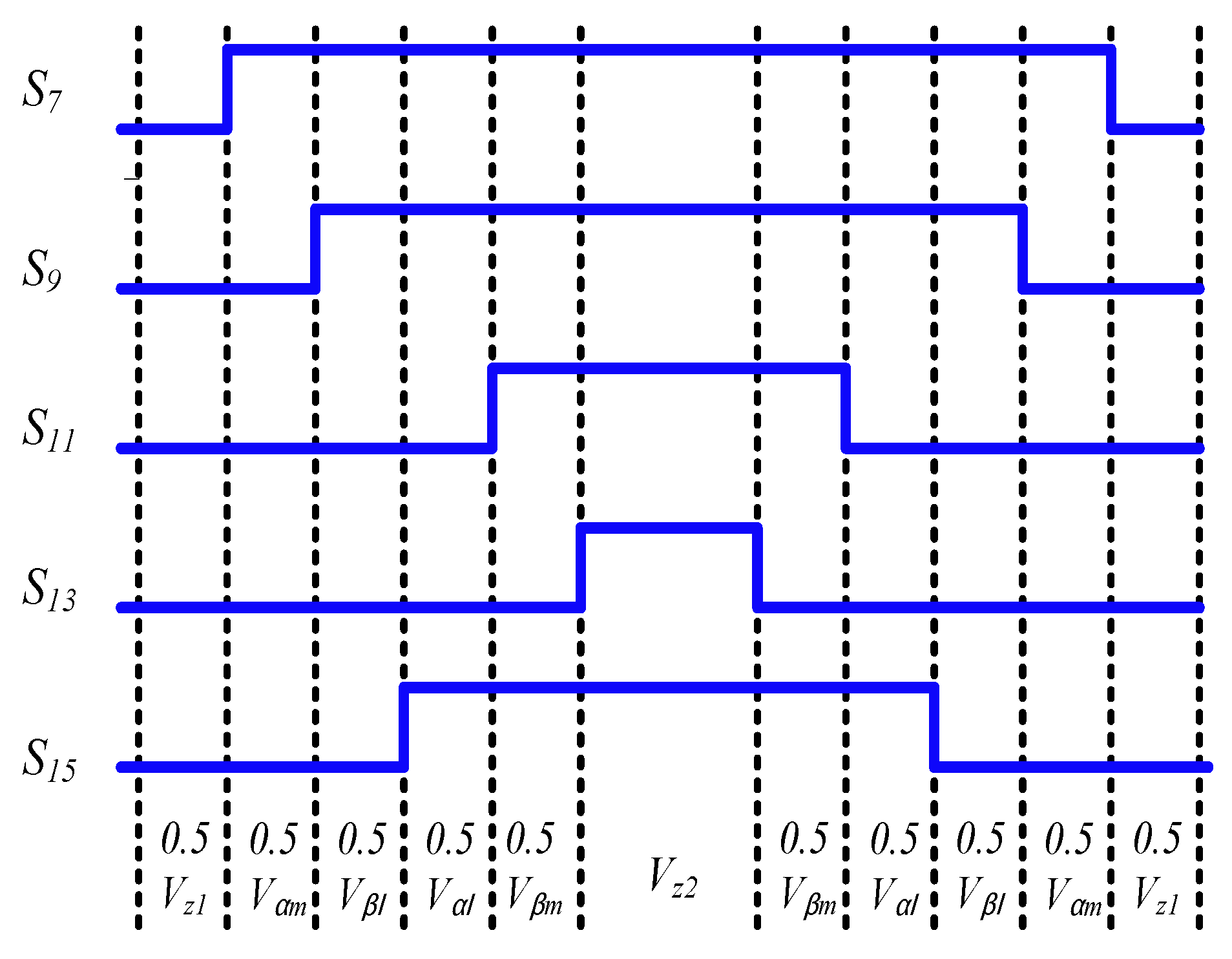
2.2.2. Five-Phase Inverter Stage
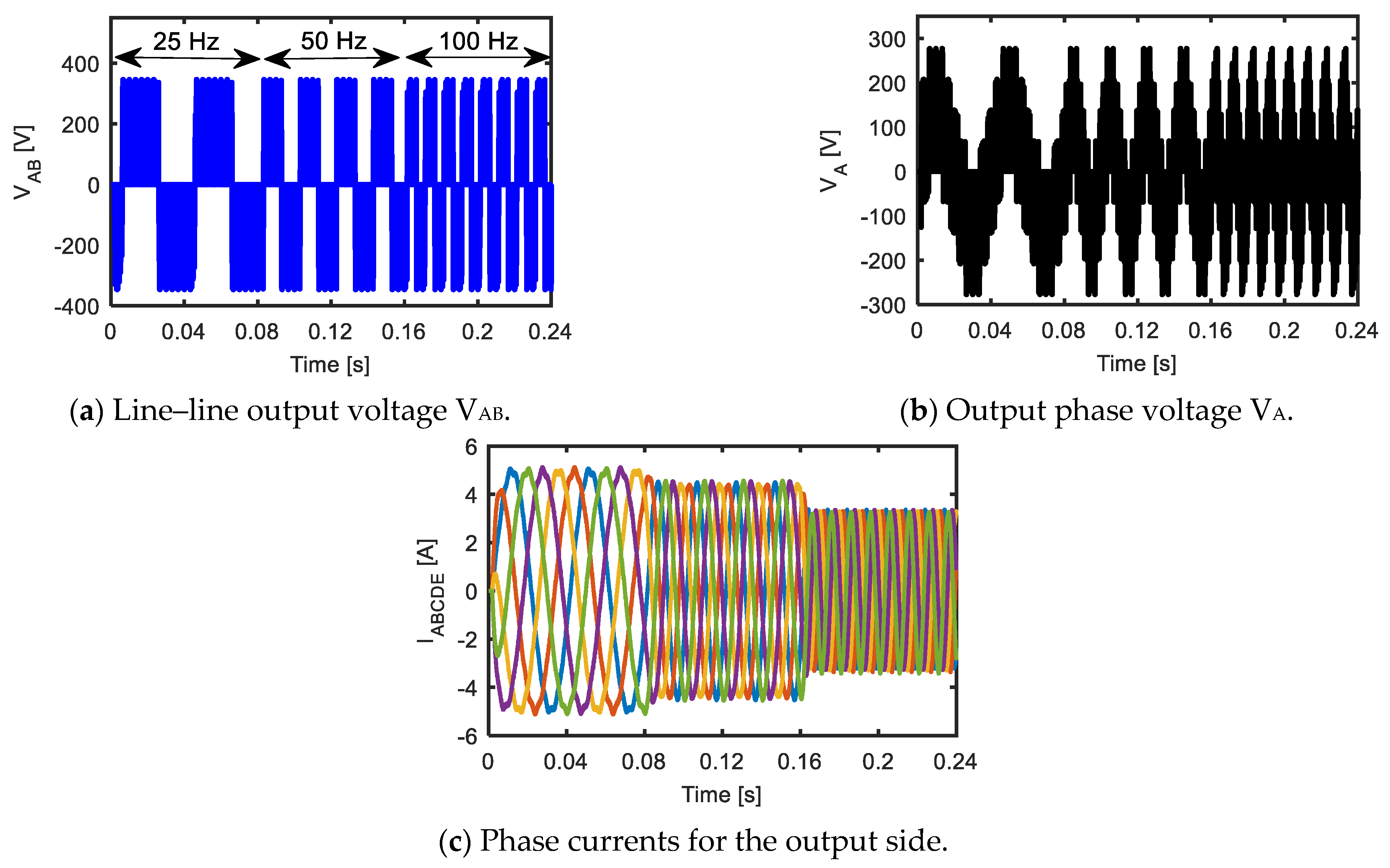
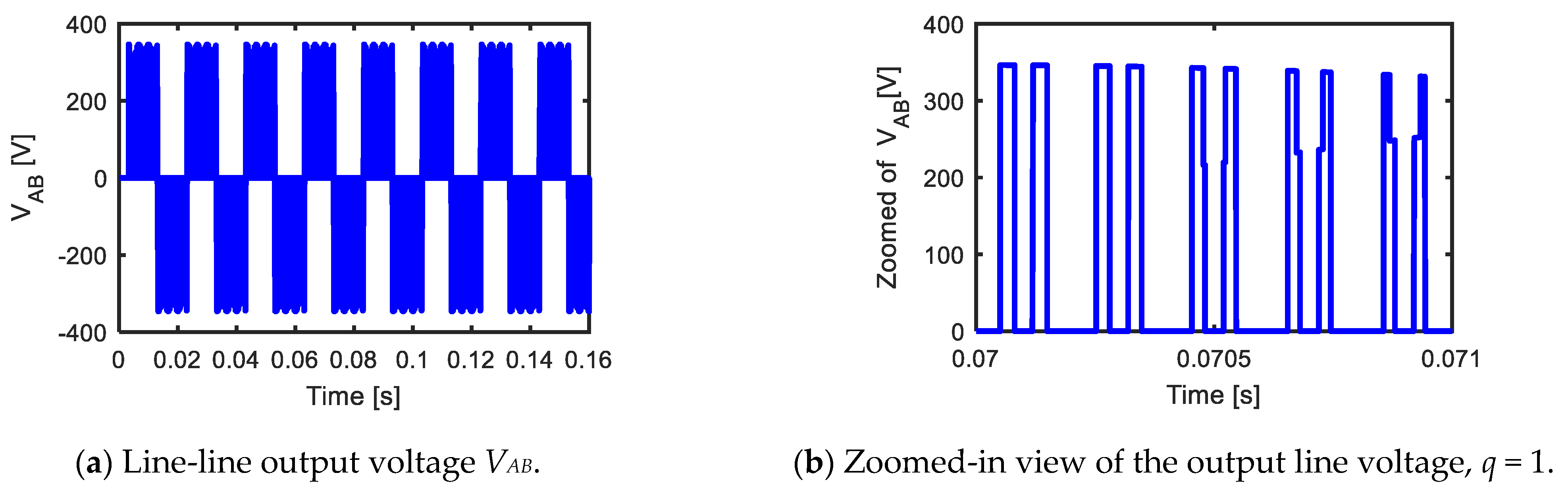
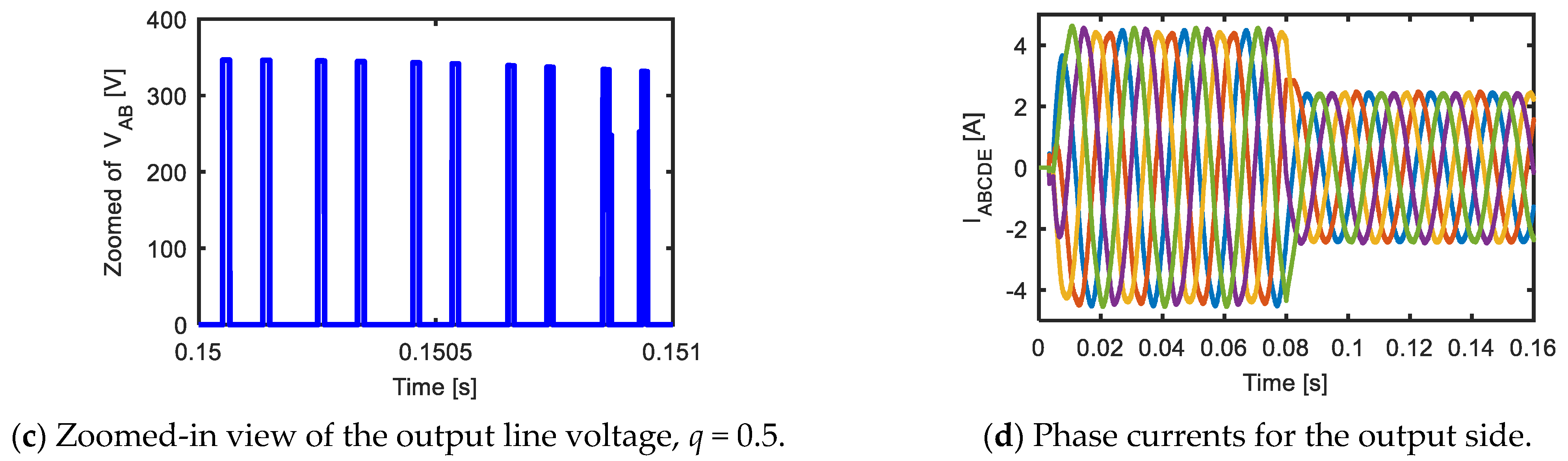
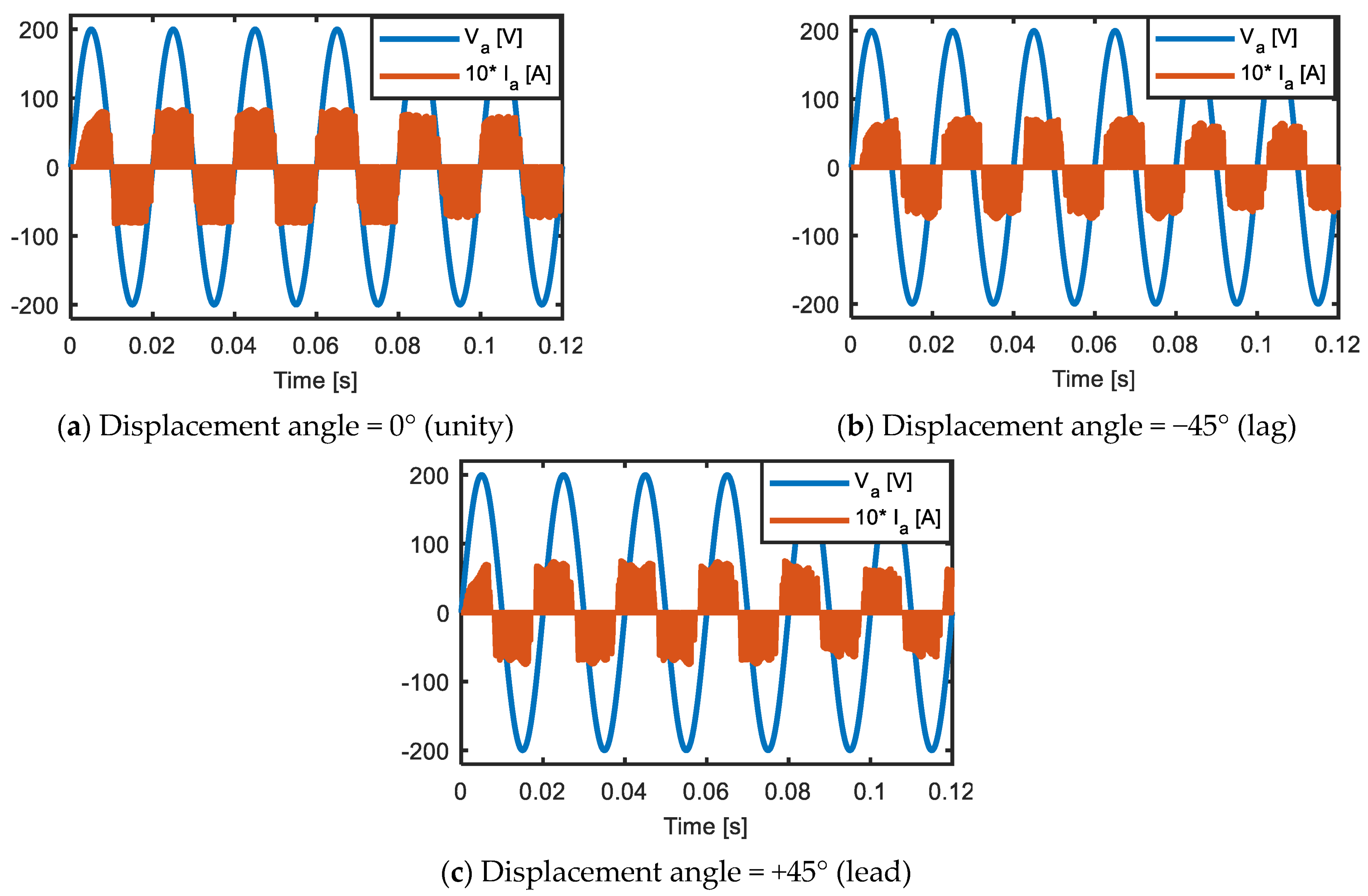
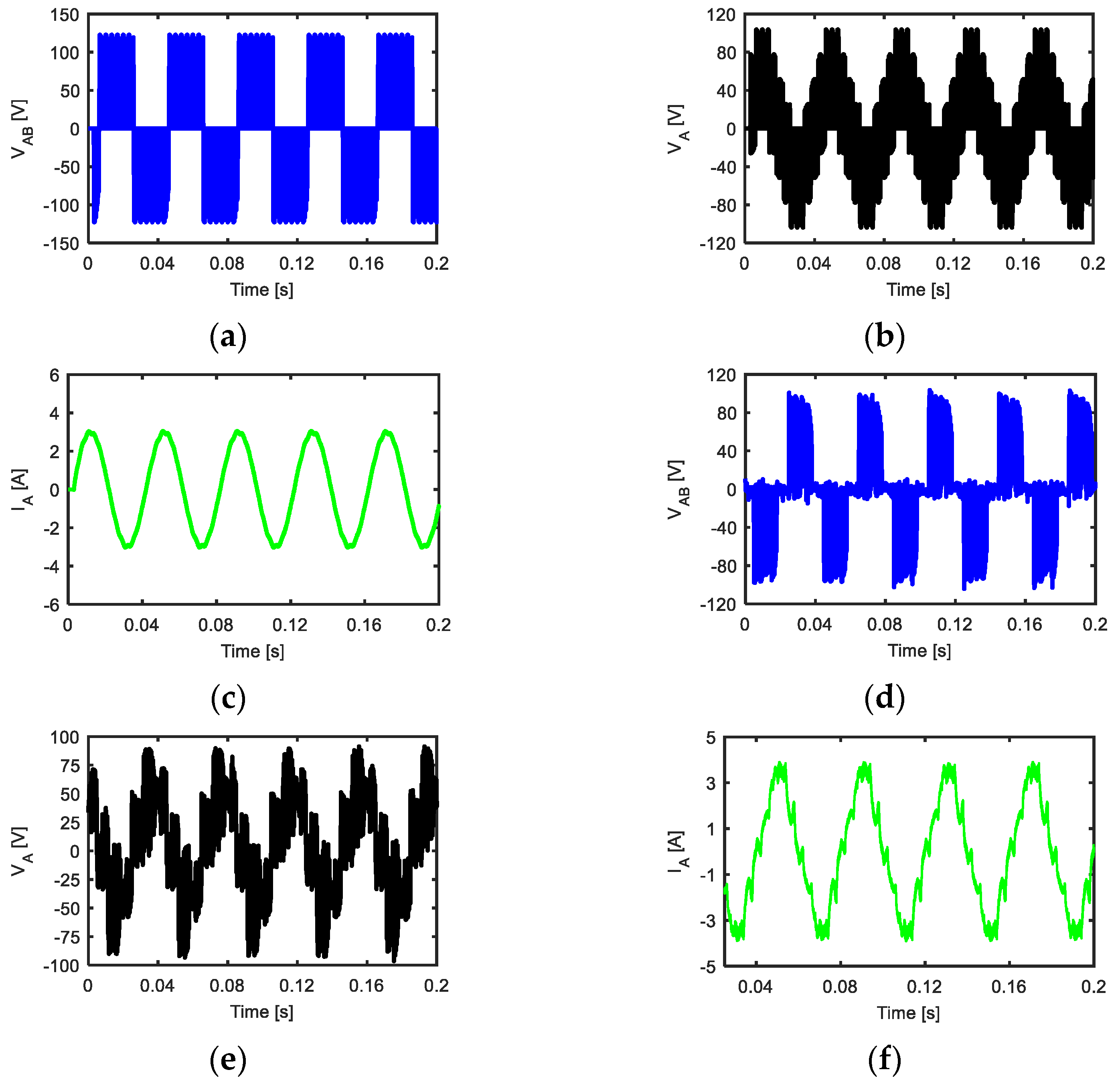
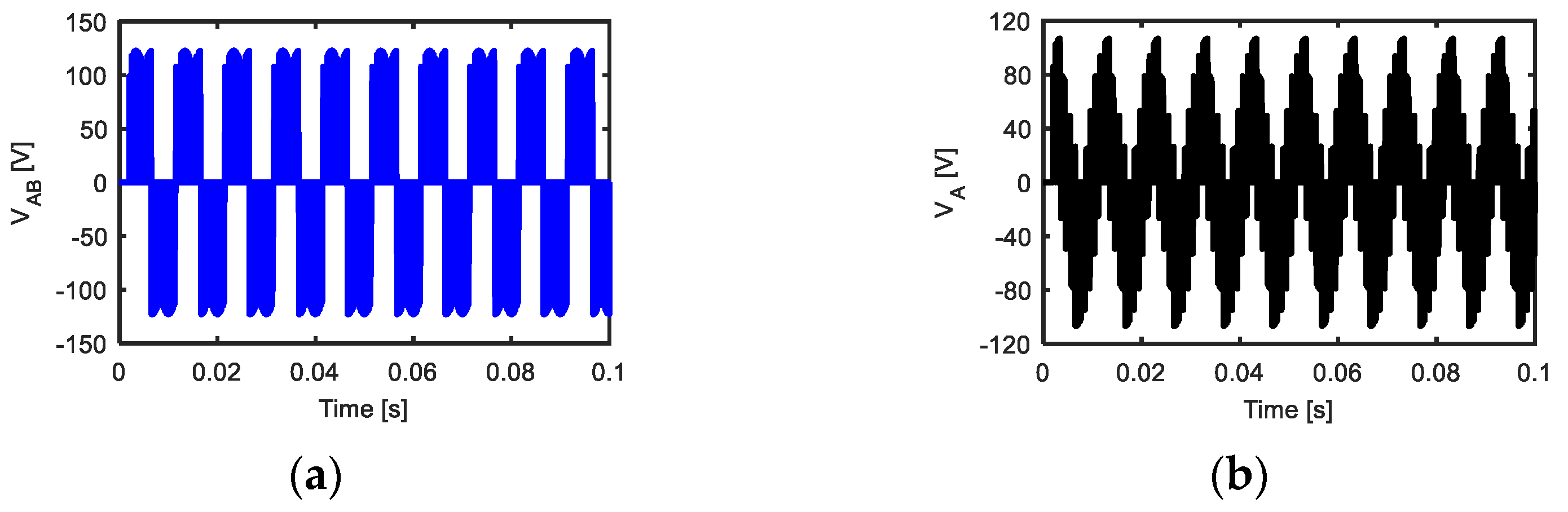
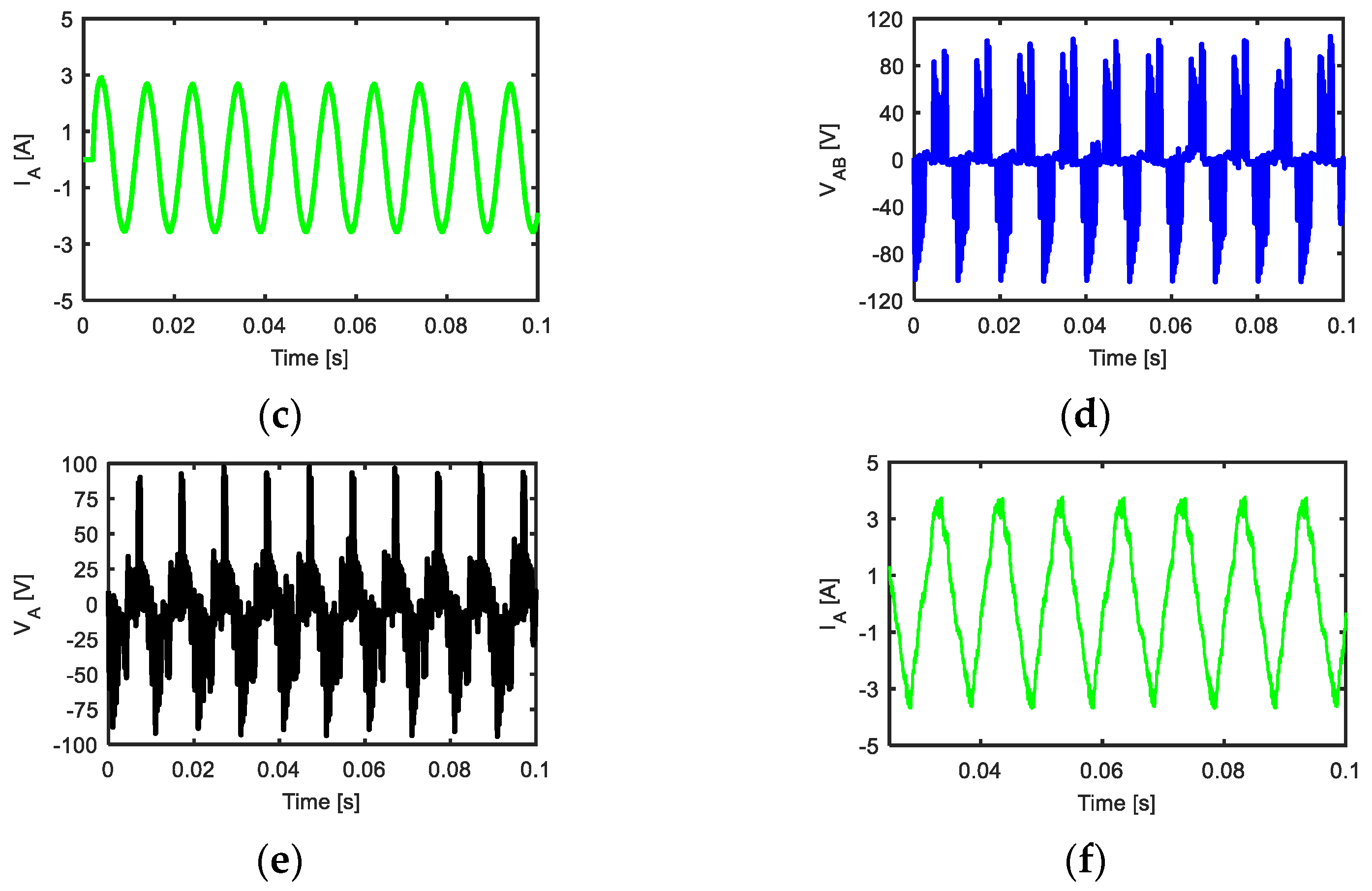
3. Performance Analysis of the Five-Phase MC
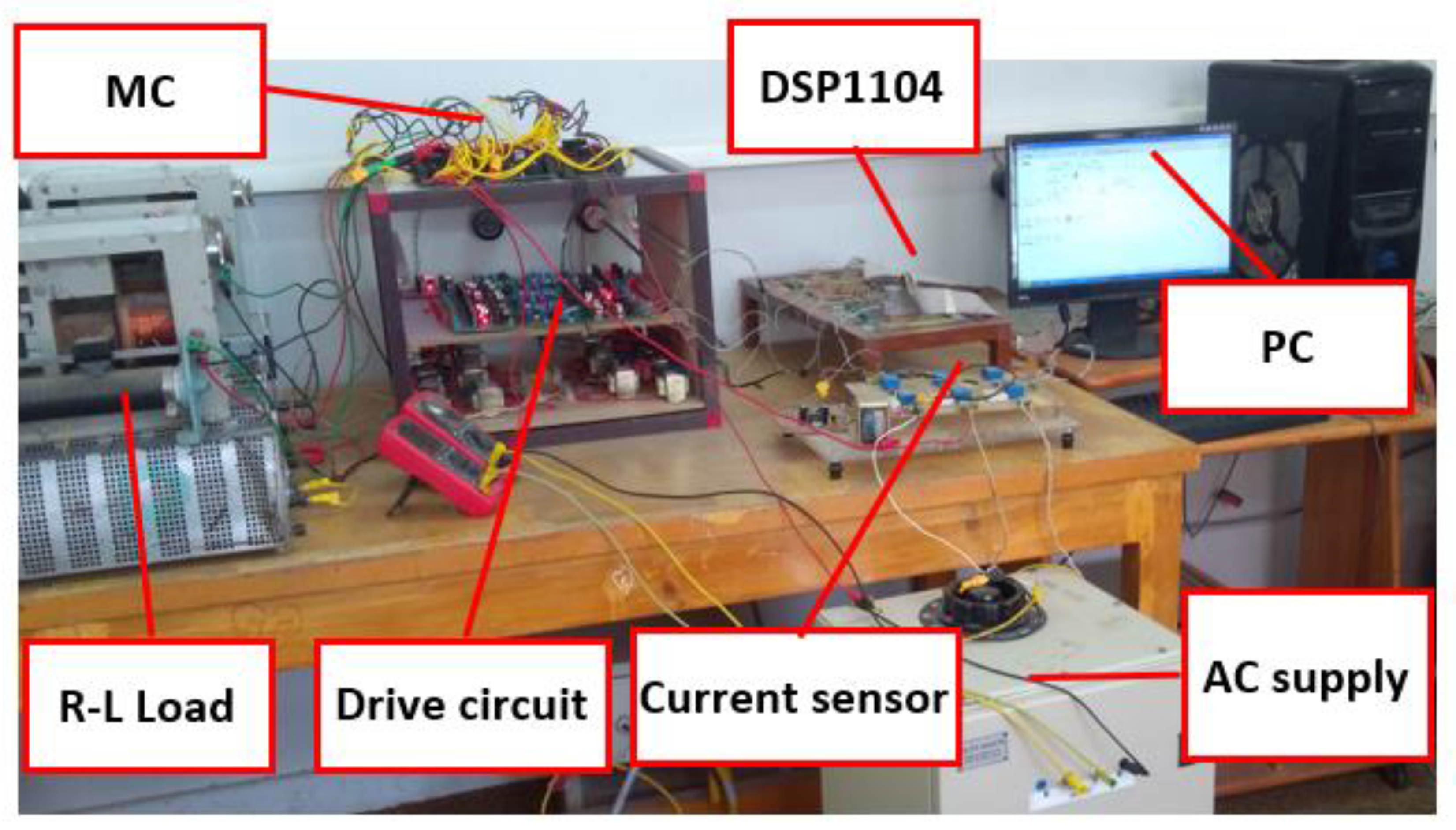
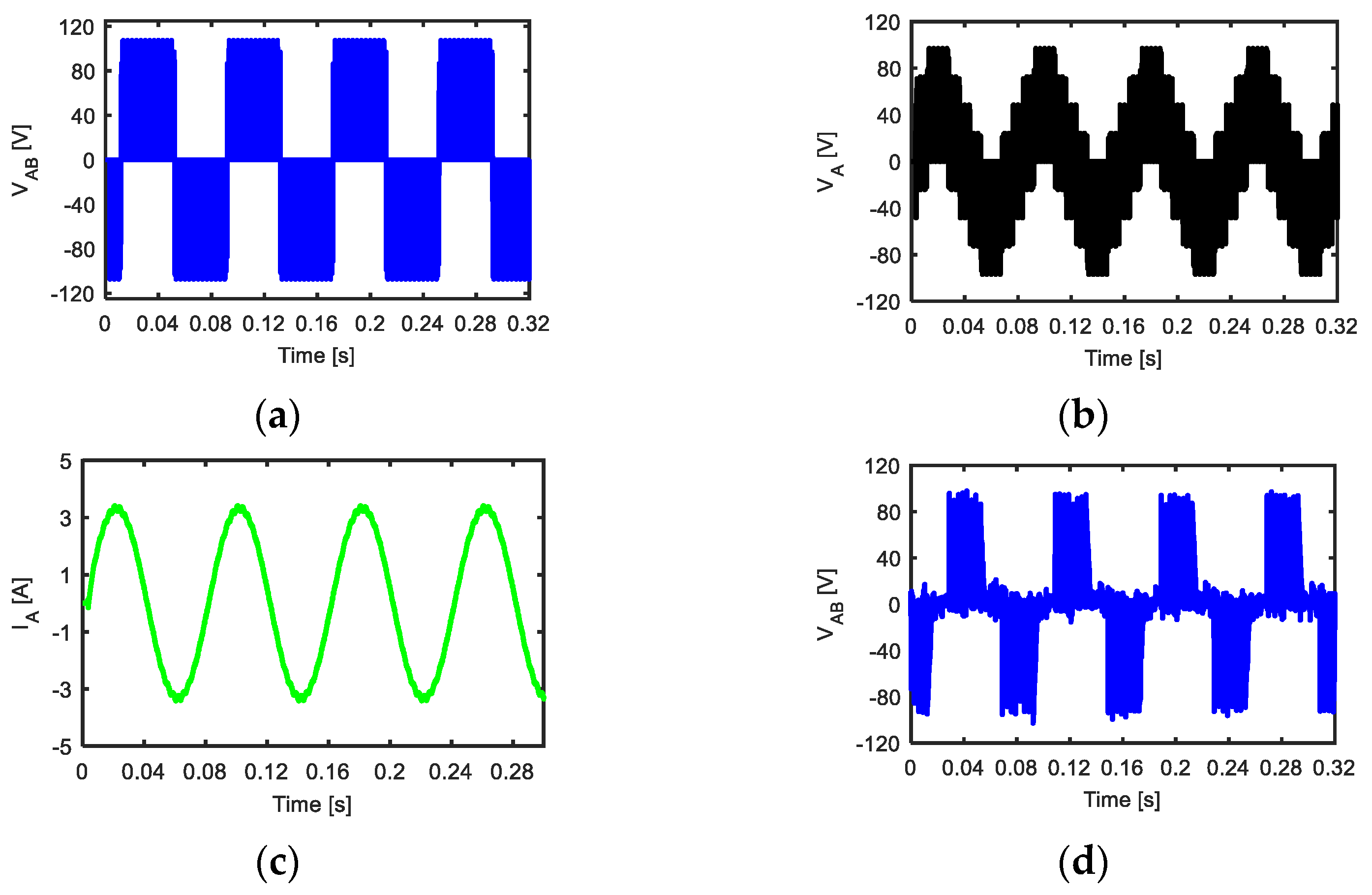
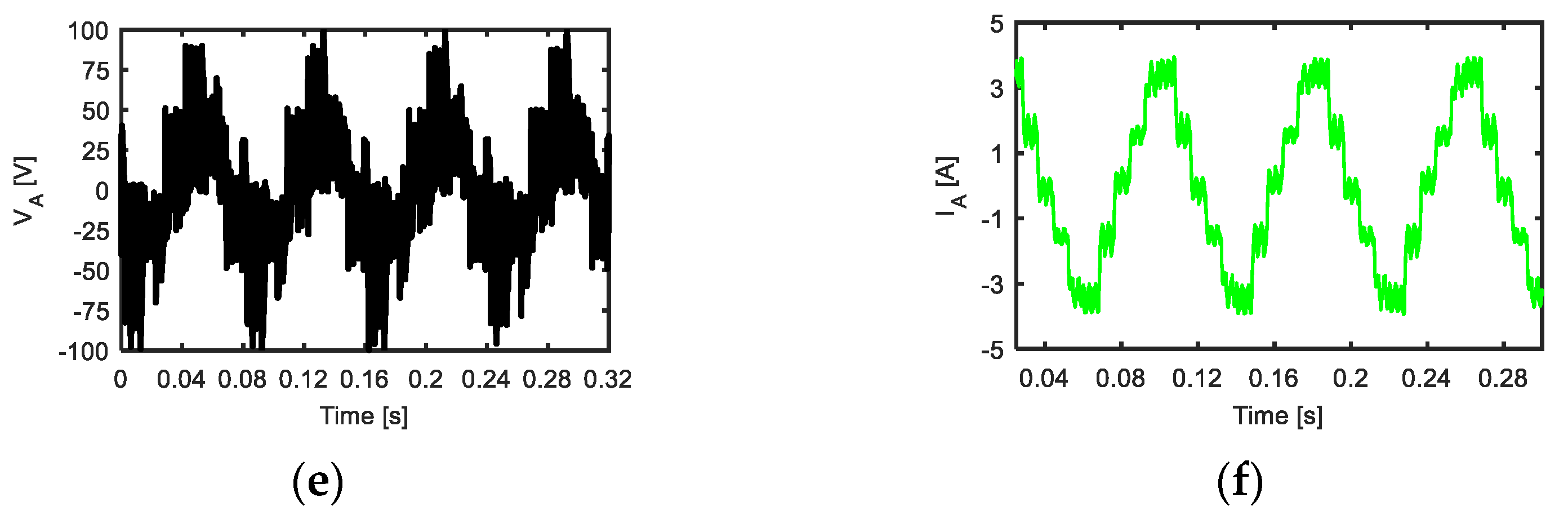
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Atallah, K.; Wang, J.B.; Howe, D. Torque-ripple minimization in modular permanent-magnet brushless machines. IEEE Trans. Ind. Appl. 2003, 39, 1689–1695. [Google Scholar] [CrossRef]
- Wang, J.B.; Atallah, K.; Howe, D. Optimal torque control of fault tolerant permanent magnet brushless machines. IEEE Trans. Magn. 2003, 39, 2962–2974. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; El-Kholy, E.E.; Sergeant, P. Refurbishing three-phase synchronous reluctance machines to multiphase machine. Electr. Eng. 2020. [Google Scholar] [CrossRef]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef] [Green Version]
- Prieto, G.; Duran, M.; Aciego, J.; Martin, C.; Barrero, F. Model predictive control of six-phase induction motor drives using virtual voltage vectors. IEEE Trans. Ind. Electron. 2018, 65, 27–37. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; El-Kholy, E.E.; Sergeant, P. Performance Improvement of Existing Three phase Synchronous Reluctance Machine: Stator Upgrading to 5-phase with Combined Star-Pentagon Winding. IEEE Access 2020, 8, 143569–143583. [Google Scholar] [CrossRef]
- Armin, M.; Roy, P.N.; Sarkar, S.K.; Das, S.K. LMI-based robust PID controller design for voltage control of islanded micro grid. Asian J. Control 2018, 20, 2014–2025. [Google Scholar] [CrossRef]
- Ibrahim, M.N.; Tawfiq, K.B.; Rashad, E.M.; Sergeant, P. Synchronous Reluctance Machines: Performance Evaluation with and Without Ferrite Magnets. In Proceedings of the International Conference on Industrial Manufacturing and Metallurgy (ICIM 2020), Nizhny Tagil, Russia, 18–19 June 2020. [Google Scholar]
- Zhang, J.; Dan, H.; Empringham, L.; De Lillo, L.; Wheeler, P. Matrix Converter Open-Circuit Fault Behavior Analysis and Diagnosis with a Model Predictive Control Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1831–1839. [Google Scholar] [CrossRef]
- Levi, E. Multi-phase electric machines for variable speed applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulator for forced commutated cycloconverters. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; pp. 871–876. [Google Scholar]
- Xu, H.; Toliyat, H.A.; Petersen, L.J. Five-phase induction motor drives with DSP based control system. IEEE Trans. Power Electron. 2002, 17, 524–533. [Google Scholar]
- Levi, E.; Bojoi, R.; Farina, F.; Toliyat, H.A.; Williamson, S. Multi-phase induction motor drives-A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Tawfiq, K.B.; Abdou, A.F.; El-Kholy, E.E.; Shokralla, S.S. A modified space vector modulation algorithm for a matrix converter with lower total harmonic distortion. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Tawfiq, K.B.; Abdou, A.F.; El-Kholy, E.E.; Shokralla, S.S. Application of matrix converter connected to wind energy system. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 604–609. [Google Scholar]
- Dabour, S.M.; Hassan, A.E.; Rashad, E. Analysis and implementation of space vector modulated five-phase matrix converter. Int. J. Electr. Power Energy Syst. 2014, 63, 740–746. [Google Scholar] [CrossRef]
- Gyugyi, L.; Pelly, B.R. Static Power Frequency Changers-Theory, Performance and Application; J. Wiley: New York, NY, USA, 1976. [Google Scholar]
- Venturini, M. A new sine wave in sine wave out conversion technique which eliminates reactive elements. Proc. POWERCON 1980, 7, E3.1–E3.15. [Google Scholar]
- Alesiana, A.; Venturini, M. Analysis and design of optimum-amplitude nine switch direct AC–AC converters. IEEE Trans. Power Electron. 1989, 4, 101–112. [Google Scholar] [CrossRef]
- Casadei, D.; Grandi, G.; Serra, G.; Tani, A. Space vector control of matrix converters with unity power factor and sinusoidal input/output waveforms. Proc. EPE Conf. 1993, 7, 170–175. [Google Scholar]
- Leon, J.I.; Lopez, O.; Franquelo, L.G.; Doval-Gandoy, J.; Vazquez, S.; Alvarez, J.; Freijedo, F.D. Multilevel multiphase feed-forward space vector modulation technique. IEEE Trans. Ind. Electron. 2010, 57, 2066–2075. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulated three-phase to three-phase matrix converter with input power factor correction. IEEE Trans. Ind. Appl. 1995, 31, 1234–1246. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H.; Khan, M.R. Space vector PWM technique for a novel 3 to 5 phase matrix converter. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atalanta, GA, USA, 12–16 September 2010; pp. 1875–1880. [Google Scholar]
- Yoon, Y.-D.; Sul, S.-K. Carrier-based modulation technique for matrix converter. IEEE Trans. Power Electron. 2006, 21, 1691–1703. [Google Scholar] [CrossRef]
- Bhowmick, S.; Umana, L. Design and Analysis of the Low Device Stress Active Power Decoupling for Single-Phase Grid Connection for a Wide Range of Power Factor. IEEE J. Emerg. Sel. Topic Power Electron. 2018, 6, 1921–1931. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Z.; Liu, H.; Hu, J. Linear ADRC direct current control of grid-connected inverter with LCL filter for both active damping and grid voltage induced current distortion suppression. IET Power Electron. 2018, 11, 1748–1755. [Google Scholar] [CrossRef]
- Amin, A.; Tawfiq, K.B.; Youssef, H.; El-Kholy, E.E. Performance analysis of inverter fed from wind energy system. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 512–516. [Google Scholar]
- Wang, H.; Zhang, Y.; Mei, S.; Sun, Y.; Li, X.; Zhang, G. Control method for the two-stage matrix converter to enhance the linear voltage transfer ratio. IET Power Electron. 2018, 11, 2295–2301. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H. Carrier-based PWM technique of a novel three-to-seven-phase matrix converter. In Proceedings of the Presented at the International Conference on Electrical Machines ICEM, Rome, Italy, 3–6 September 2010. [Google Scholar]
- Tawfiq, K.B.; Mansour, A.; Ibrahim, M.N.F.; Elkholy, E.; Sergeant, P. Implementation of matrix converter in wind energy conversion system with modified control techniques. Electr. Power Compon. Syst. 2019, 47, 1316–1331. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H. Generalized Duty-Ratio-Based Pulse width Modulation Technique for a Three-to- kk Phase Matrix Converter. IEEE Trans. Ind. Electron. 2011, 58, 3925–3937. [Google Scholar] [CrossRef]
- Iqbal, A.; Ahmed, M.; Abu-Rub, H. Space vector PWM technique for a three-to-five-phase matrix converter. IEEE Trans. Ind. Appl. 2012, 48, 489–497. [Google Scholar] [CrossRef]
- Simon, O.; Mahlein, J.; Muenzer, M.N.; Bruckmann, M. Modern solution for industrial matrix converter applications. IEEE Trans. Ind. Electron. 2002, 49, 401–406. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H.; Rodriguez, J.; Rojas, C. Simple carrier-based PWM technique for a three to nine phase matrix converter. IEEE Trans. Ind. Electron. 2011, 58, 5014–5023. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector No. | Iδ | Iγ | I0 |
|---|---|---|---|
| 1 | I1 (a, b) | I2 (a, c) | I7 (a, a) |
| 2 | I2 (a, c) | I3 (b, c) | I9 (c, c) |
| 3 | I3 (b, c) | I4 (b, a) | I8 (b, b) |
| 4 | I4 (b, a) | I5 (c, a) | I7 (a, a) |
| 5 | I5 (c, a) | I6 (c, b) | I9 (c, c) |
| 6 | I6 (c, b) | I1 (a, b) | I8 (b, b) |
| Sector No. | ||||||
|---|---|---|---|---|---|---|
| 1 | V11 (10000) | V1 (11001) | V12 (11101) | V2 (11000) | V31 (00000) | V32 (11111) |
| 2 | V13 (01000) | V2 (11000) | V3 (11100) | V12 (11101) | ||
| 3 | V13 (01000) | V4 (01100) | V3 (11100) | V14 (11110) | ||
| 4 | V15 (00100) | V4 (01100) | V5 (01110) | V14 (11110) | ||
| 5 | V15 (00100) | V6 (00110) | V5 (01110) | V16 (01111) | ||
| 6 | V17 (00010) | V6 (00110) | V7 (00111) | V16 (01111) | ||
| 7 | V17 (00010) | V8 (00011) | V7 (00111) | V18 (10111) | ||
| 8 | V19 (00001) | V8 (00011) | V9 (10011) | V18 (10111) | ||
| 9 | V19 (00001) | V10 (10001) | V9 (10011) | V20 (11011) | ||
| 10 | V11 (10000) | V10 (10001) | V1 (11001) | V20 (11011) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tawfiq, K.B.; Ibrahim, M.N.; Rezk, H.; El-kholy, E.E.; Sergeant, P. Mathematical Modelling, Analysis and Control of a Three to Five-Phase Matrix Converter for Minimal Switching Losses. Mathematics 2021, 9, 96. https://0-doi-org.brum.beds.ac.uk/10.3390/math9010096
Tawfiq KB, Ibrahim MN, Rezk H, El-kholy EE, Sergeant P. Mathematical Modelling, Analysis and Control of a Three to Five-Phase Matrix Converter for Minimal Switching Losses. Mathematics. 2021; 9(1):96. https://0-doi-org.brum.beds.ac.uk/10.3390/math9010096
Chicago/Turabian StyleTawfiq, Kotb B., Mohamed N. Ibrahim, Hegazy Rezk, Elwy E. El-kholy, and Peter Sergeant. 2021. "Mathematical Modelling, Analysis and Control of a Three to Five-Phase Matrix Converter for Minimal Switching Losses" Mathematics 9, no. 1: 96. https://0-doi-org.brum.beds.ac.uk/10.3390/math9010096