
Mathematical Modeling, Analysis and Evaluation of the Complexity of Flight Paths of Groups of Unmanned Aerial Vehicles in Aviation and Transport Systems


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Models and Methods
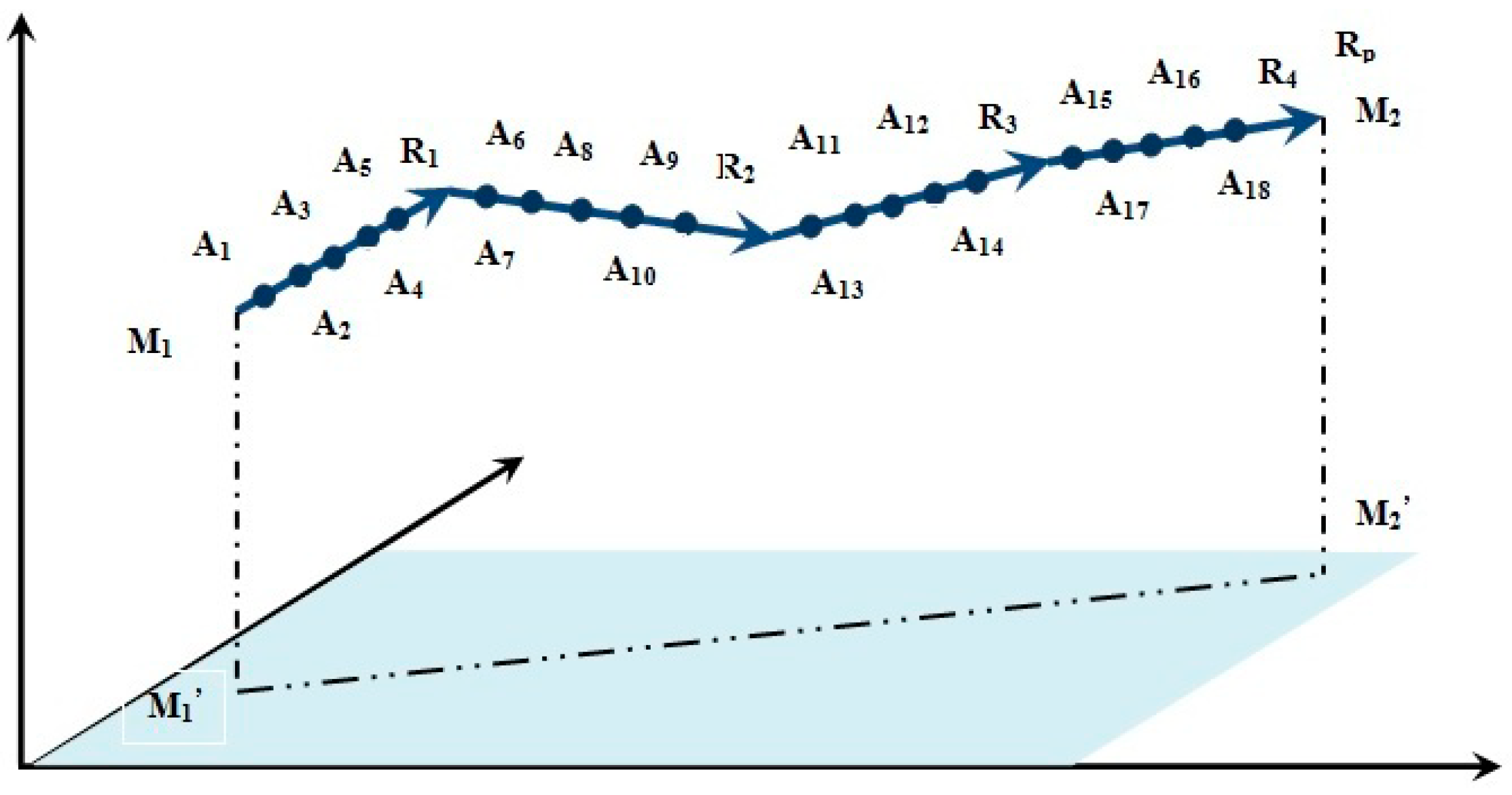
3. Route Construction Algorithm
- Splitting into fragments of the same length.
- Splitting into fragments corresponding to the selected typical sections of the route.
- Splitting into fragments, selected by the properties of the airspace through which the route is laid.
- The angle of climb or descent in the direction of movement along the route. The value of this property is the value of the angle between the perpendicular to the surface along which the route passes and the tangent to the real curve of the route line. The perpendicular and tangent are constructed from the same point selected on the plot.
- The average angle of climb or descent in the direction of movement along the route. The value of this property is obtained by calculating the ratio of the integral value along the curve of the line corresponding to this section from the value of the previous property at each point of the area to the length of this section.
- The angle of the transverse slope. The value of this property is the value of the angle between the vertical and the line, the direction of which is set by the vector product of the direction of movement along the route and the external normal to the surface, constructed from the same point selected on the section.
- The average angle of the transverse slope.
- Properties characterize the specifics of the space in which the route section is located: the presence or absence of restricted zones, their shape, size, atmospheric phenomena that affect traffic on this section, etc.
- Properties that characterize the specifics of the trajectory of this section of the route: the number of turns, the radius and angle of rotation, the distance between turns, etc.
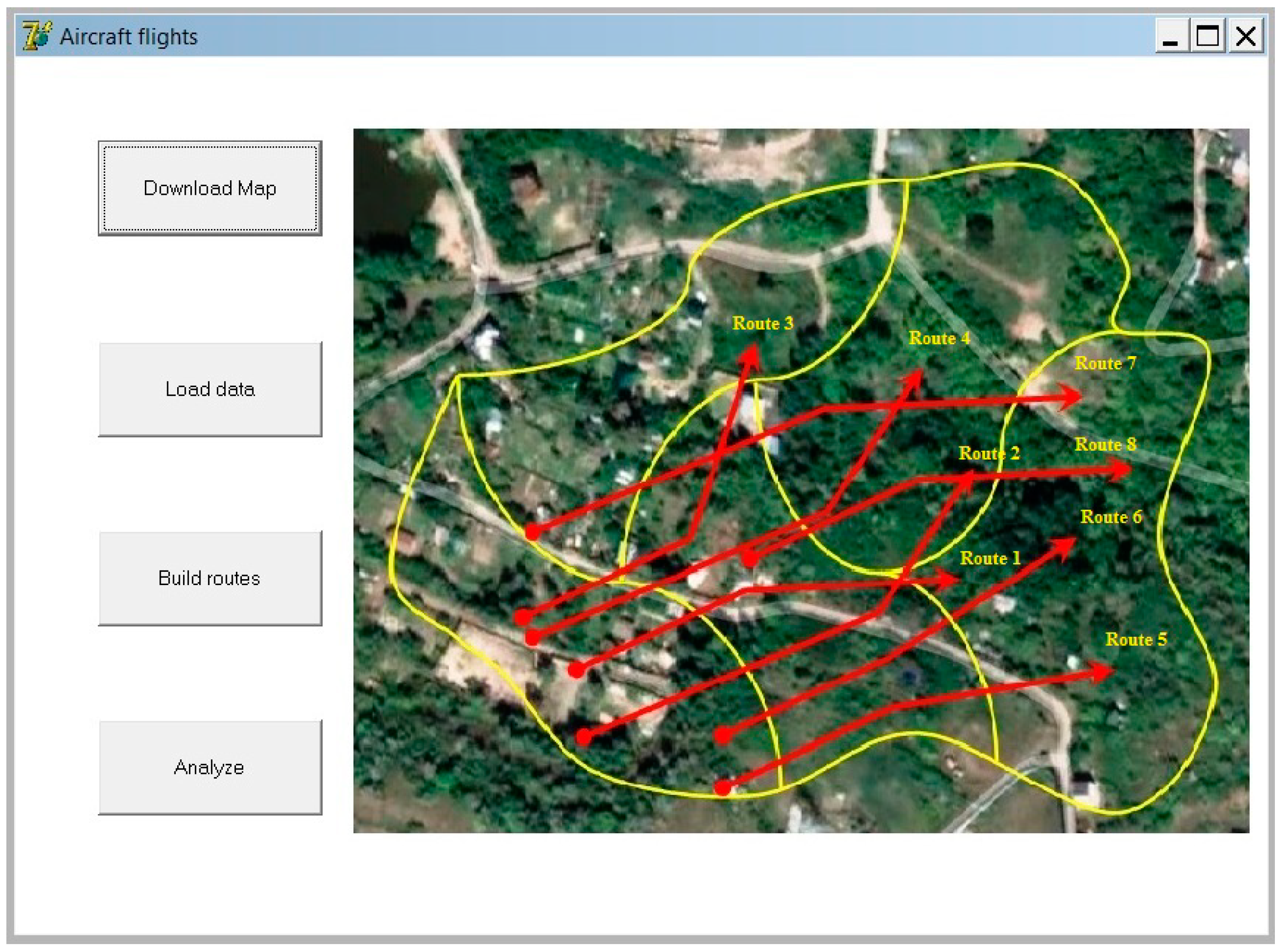
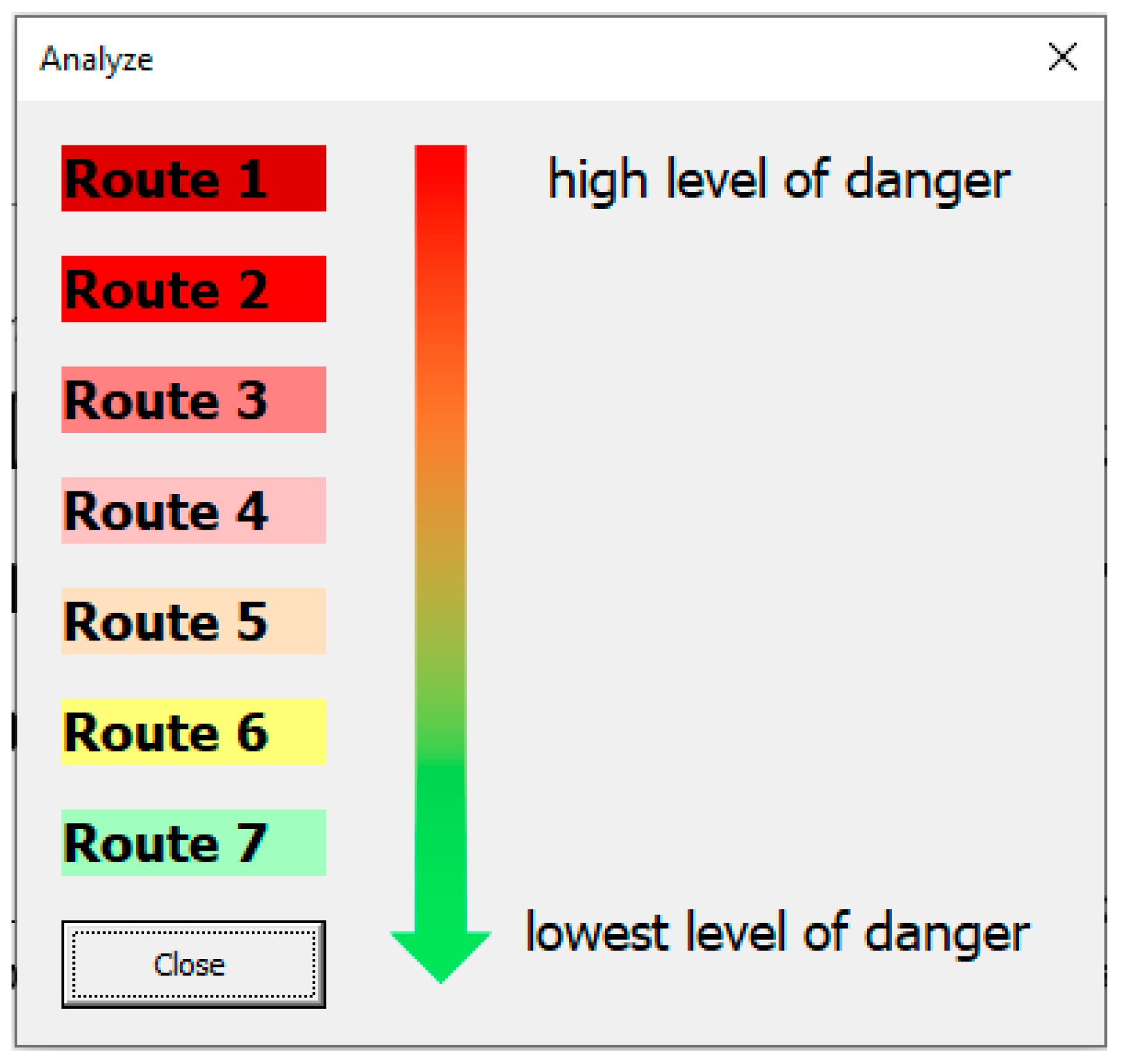
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- DeGarmo, M.; Nelson, G. Prospective Unmanned Aerial Vehicle Operations in the Future National Airspace System. In Proceedings of the AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum, Chicago, IL, USA, 20–22 September 2004. [Google Scholar]
- Coutinho, W.P.; Battarra, M.; Fliege, J. The unmanned aerial vehicle routing and trajectory optimisation problem, a taxonomic review. Comput. Ind. Eng. 2018, 120, 116–128. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative Routing Problem for Ground Vehicle and Unmanned Aerial Vehicle: The Application on Intelligence, Surveillance, and Reconnaissance Missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Della, R.H.; Lirn, T.-C.; Shang, K.-C. The study of safety behavior in ferry transport. Saf. Sci. 2020, 131, 104912. [Google Scholar] [CrossRef]
- Atombo, C.; Wu, C.; Tettehfio, E.O.; Nyamuame, G.Y.; Agbo, A.A. Safety and Health Perceptions in Work-related Transport Activities in Ghanaian Industries. Saf. Health Work 2016, 8, 175–182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khasanshin, I. Application of an Artificial Neural Network to Automate the Measurement of Kinematic Characteristics of Punches in Boxing. Appl. Sci. 2021, 11, 1223. [Google Scholar] [CrossRef]
- Barajas, J.M.; Beck, K.M.; Cooper, J.F.; Lopez, A.; Reynosa, A. How effective are community pedestrian safety training workshops? Short-term findings from a program in California. J. Transp. Health 2019, 12, 183–194. [Google Scholar] [CrossRef]
- Laker, L.F.; Torabi, E.; France, D.J.; Froehle, C.M.; Goldlust, E.; Hoot, N.R.; Kasaie, P.; Lyons, M.S.; Barg-Walkow, L.H.; Ward, M.J.; et al. Understanding Emergency Care Delivery Through Computer Simulation Modeling. Acad. Emerg. Med. 2017, 25, 116–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Durmanov, A.; Li, M.; Khafizov, O.; Maksumkhanova, A.; Kilicheva, F.; Jahongir, R. Simulation modeling, analysis and performance assessment. In Proceedings of the International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 4–6 November 2019; pp. 1–5. [Google Scholar]
- Korchagin, S.A.; Terin, D.V.; Klinaev, Y.V.; Romanchuk, S.P. Simulation of Current-Voltage Characteristics of Con-glomerate of Nonlinear Semiconductor Nano-composites. In Proceedings of the 2018 International Conference on Actual Problems of Electron Devices Engineering (APEDE), Saratov, Russia, 27–28 September 2018; pp. 397–399. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2019, 149, 270–299. [Google Scholar] [CrossRef]
- Huang, C.; Fei, J.; Deng, W. A novel route planning method of fixed-wing un-manned aerial vehicle based on improved QPSO. IEEE Access 2020, 8, 65071–65084. [Google Scholar] [CrossRef]
- Niu, H.; Savvaris, A.; Tsourdos, A.; Ji, Z. Voronoi-Visibility Roadmap-based Path Planning Algorithm for Unmanned Surface Vehicles. J. Navig. 2019, 72, 850–874. [Google Scholar] [CrossRef]
- Ramasamy, M.; Ghose, D. A Heuristic Learning Algorithm for Preferential Area Surveillance by Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2017, 88, 655–681. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. An energy-efficient path planning algorithm for unmanned surface vehicles. Ocean Eng. 2018, 161, 308–321. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, P.; Sobral, J.; Ferreira, L. Unmanned aerial vehicle safety assessment modelling through petri Nets. Reliab. Eng. Syst. Saf. 2017, 167, 383–393. [Google Scholar] [CrossRef]
- Andriyanov, N.; Andriyanov, D. Intelligent Processing of Voice Messages in Civil Aviation: Message Recognition and the Emotional State of the Speaker Analysis. In Proceedings of the 2021 International Siberian Conference on Control and Communications (SIBCON), Kazan, Russia, 13–15 May 2021; pp. 1–5. [Google Scholar]
- Fu, B.; Chen, L.; Zhou, Y.; Zheng, D.; Wei, Z.; Dai, J.; Pan, H. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C. Phase Angle-Encoded and Quantum-Behaved Particle Swarm Optimization Applied to Three-Dimensional Route Planning for UAV. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 2011, 42, 511–526. [Google Scholar] [CrossRef]
- Zhang, B.; Duan, H. Three-dimensional path planning for uninhabited combat aerial vehicle based on predator-prey pi-geon-inspired optimization in dynamic environment. IEEE/ACM Trans. Comput. Biol. Bioinform. 2017, 14, 97–107. [Google Scholar] [CrossRef]
- Petković, T.; Puljiz, D.; Marković, I.; Hein, B. Human intention estimation based on hidden Markov model motion validation for safe flexible robotized warehouses. Robot. Comput. Integr. Manuf. 2019, 57, 182–196. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wu, H.; Kou, Z. Research on the impact of dynamic performance of Metro gear transmission system caused by track spectrum excitation. Int. J. Manuf. Res. 2017, 12, 148–164. [Google Scholar] [CrossRef]
- Dakhli, A.; Amar, C.B. Power spectrum and dynamic time warping for DNA sequences classification. Evol. Syst. 2020, 11, 637–646. [Google Scholar] [CrossRef]
- Macdonald, S.; Popescu, D.C.; Popescu, O. Analyzing the Performance of Spectrum Sensing in Cognitive Radio Systems With Dynamic PU Activity. IEEE Commun. Lett. 2017, 21, 2037–2040. [Google Scholar] [CrossRef]
- Belzer, J.A. Unmanned Aircraft Systems in the National Airspace System: Establishing Equivalency in Safety and Training through a Fault Tree Analysis approach. Master’ Thesis, Ohio University, Athens, OA, USA, 2017. [Google Scholar]
- Nesterenko, A.V. Recurrent form of the renormalization group relations for the higher-order hadronic vacuum polarization function perturbative expansion coefficients. J. Phys. G Nucl. Part. Phys. 2020, 47, 105001. [Google Scholar] [CrossRef]
- Pyatkina, D.; Shcherbina, T.; Samusenkov, V.; Razinkina, I.; Sroka, M. Modeling and Management of Power Supply Enterprises’ Cash Flows. Energies 2021, 14, 1181. [Google Scholar] [CrossRef]
- Soloviev, V.; Titov, N.; Smirnova, E. Coking Coal Railway Transportation Forecasting Using Ensembles of ElasticNet, LightGBM, and Facebook Prophet; Springer Fachmedien Wiesbaden GmbH: Wiesbaden, Germany, 2020; pp. 181–190. [Google Scholar]
- Cunis, T.; Condomines, J.-P.; Burlion, L.; La Cour-Harbo, A. Dynamic Stability Analysis of Aircraft Flight in Deep Stall. J. Aircr. 2020, 57, 143–155. [Google Scholar] [CrossRef]
- Song, H.; Liu, C.; Liu, Q.; Liu, Y.; Wang, C.; Yi, M. Research on Test Aircraft Quantitative Analysis Model during Flight Test Planning. In Proceedings of the 2020 4th International Symposium on Computer Science and Intelligent Control, Newcastle upon Tyne, UK, 17–19 November 2020; pp. 1–5. [Google Scholar]
- Belcastro, C.M.; Foster, J.V.; Shah, G.H.; Gregory, I.M.; Cox, D.E.; Crider, D.A.; Groff, L.; Newman, R.L.; Klyde, D.H. Aircraft Loss of Control Problem Analysis and Research Toward a Holistic Solution. J. Guid. Control Dyn. 2017, 40, 733–775. [Google Scholar] [CrossRef]
- Shirokanev, A.; Andriyanov, N.; Ilyasova, N. Development of vector algorithm using CUDA technology for three-dimensional retinal laser coagulation process modeling. Comput. Opt. 2021, 45, 427–437. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Zhu, S. Cooperative moving path following for multiple fixed-wing unmanned aerial vehicles with speed constraints. Automatica 2018, 100, 82–89. [Google Scholar] [CrossRef]
- Xie, S.; Zhang, A.; Bi, W.; Tang, Y. Multi-UAV Mission Allocation under Constraint. Appl. Sci. 2019, 9, 2184. [Google Scholar] [CrossRef] [Green Version]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. Distribution An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Palframan, M.C.; Fry, J.M.; Farhood, M. Robustness analysis of flight controllers for fixed-wing unmanned aircraft systems using integral quadratic con-straints. IEEE Trans. Control Syst. Technol. 2017, 27, 86–102. [Google Scholar] [CrossRef]
- Su, H.; Li, S.; Yang, L.; Wang, J.; Zhang, G. Fault feature analysis of civil aircraft control surface damage. In Proceedings of the 2017 IEEE International Conference on Prog-Nostics and Health Management (ICPHM), Dallas, TX, USA, 19–21 June 2017; pp. 148–153. [Google Scholar]
- Zhang, Q.; Liu, H.H.T. Aerodynamics modeling and analysis of close for-mation flight. J. Aircr. 2017, 54, 2192–2204. [Google Scholar] [CrossRef]
- Yerznkyan, B.H.; Gataullin, T.M.; Gataullin, S.T. Solow Models with Linear Labor Function for Industry and Enterprise. Montenegrin J. Econ. 2021, 17, 111–120. [Google Scholar] [CrossRef]
- Sebyakin, A.; Soloviev, V.; Zolotaryuk, A. Spatio-Temporal Deepfake Detection with Deep Neural Networks. In Proceedings of the 16th International Conference, iConference 2021, Beijing, China, 17–31 March 2021; pp. 78–94. [Google Scholar]
- Kuznetsova, A.; Maleva, T.; Soloviev, V. YOLOv5 versus YOLOv3 for Apple Detection. In Cyber-Physical Systems: Modelling and Intelligent Control; Springer: Berlin/Heidelberg, Germany, 2021; pp. 349–358. [Google Scholar]
- Korchagin, S.; Serdechny, D.; Kim, R.; Terin, D.; Bey, M. The use of machine learning methods in the diagnosis of diseases of crops. E3S Web Conf. 2020, 176, 04011. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kositzyn, A.; Serdechnyy, D.; Korchagin, S.; Pleshakova, E.; Nikitin, P.; Kurileva, N. Mathematical Modeling, Analysis and Evaluation of the Complexity of Flight Paths of Groups of Unmanned Aerial Vehicles in Aviation and Transport Systems. Mathematics 2021, 9, 2171. https://0-doi-org.brum.beds.ac.uk/10.3390/math9172171
Kositzyn A, Serdechnyy D, Korchagin S, Pleshakova E, Nikitin P, Kurileva N. Mathematical Modeling, Analysis and Evaluation of the Complexity of Flight Paths of Groups of Unmanned Aerial Vehicles in Aviation and Transport Systems. Mathematics. 2021; 9(17):2171. https://0-doi-org.brum.beds.ac.uk/10.3390/math9172171
Chicago/Turabian StyleKositzyn, Andrey, Denis Serdechnyy, Sergey Korchagin, Ekaterina Pleshakova, Petr Nikitin, and Natalia Kurileva. 2021. "Mathematical Modeling, Analysis and Evaluation of the Complexity of Flight Paths of Groups of Unmanned Aerial Vehicles in Aviation and Transport Systems" Mathematics 9, no. 17: 2171. https://0-doi-org.brum.beds.ac.uk/10.3390/math9172171