
GA−BP Prediction Model for Automobile Exhaust Waste Heat Recovery Using Thermoelectric Generator
 ,
,
Abstract
:1. Introduction
2. TEG and Experiment Plat
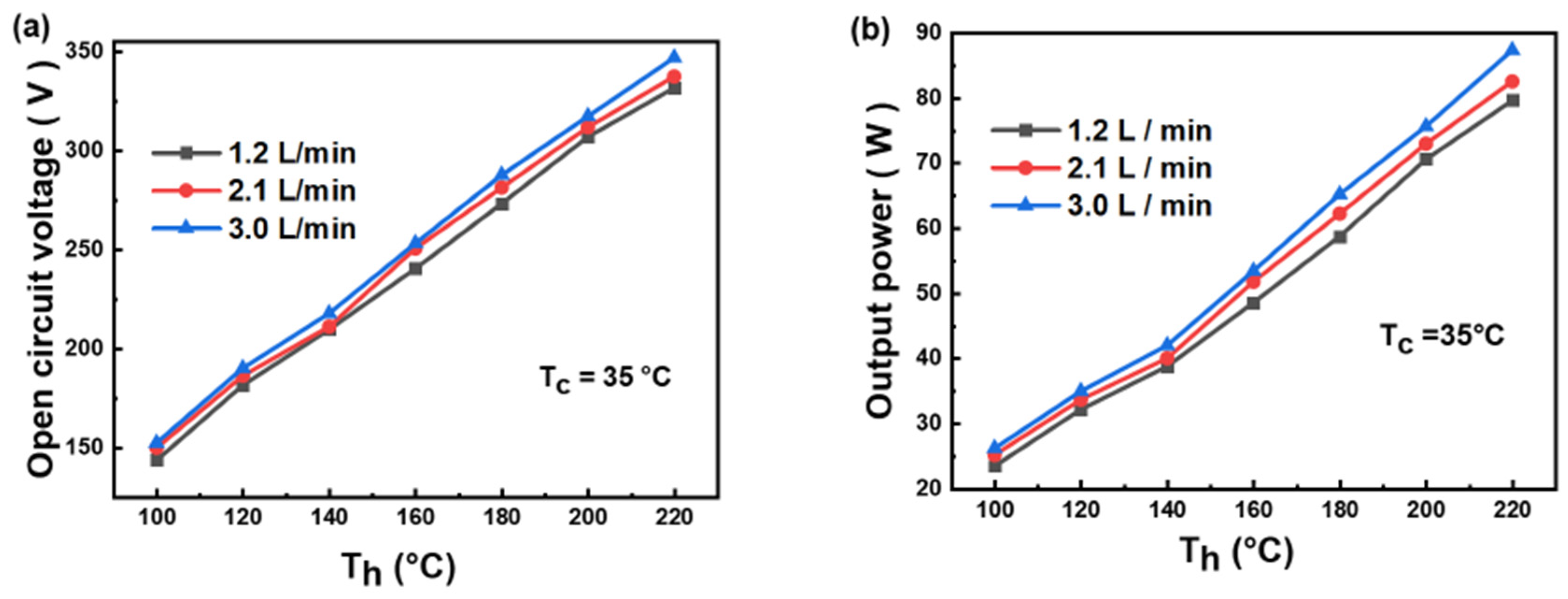
3. Experiment Results and Discussion
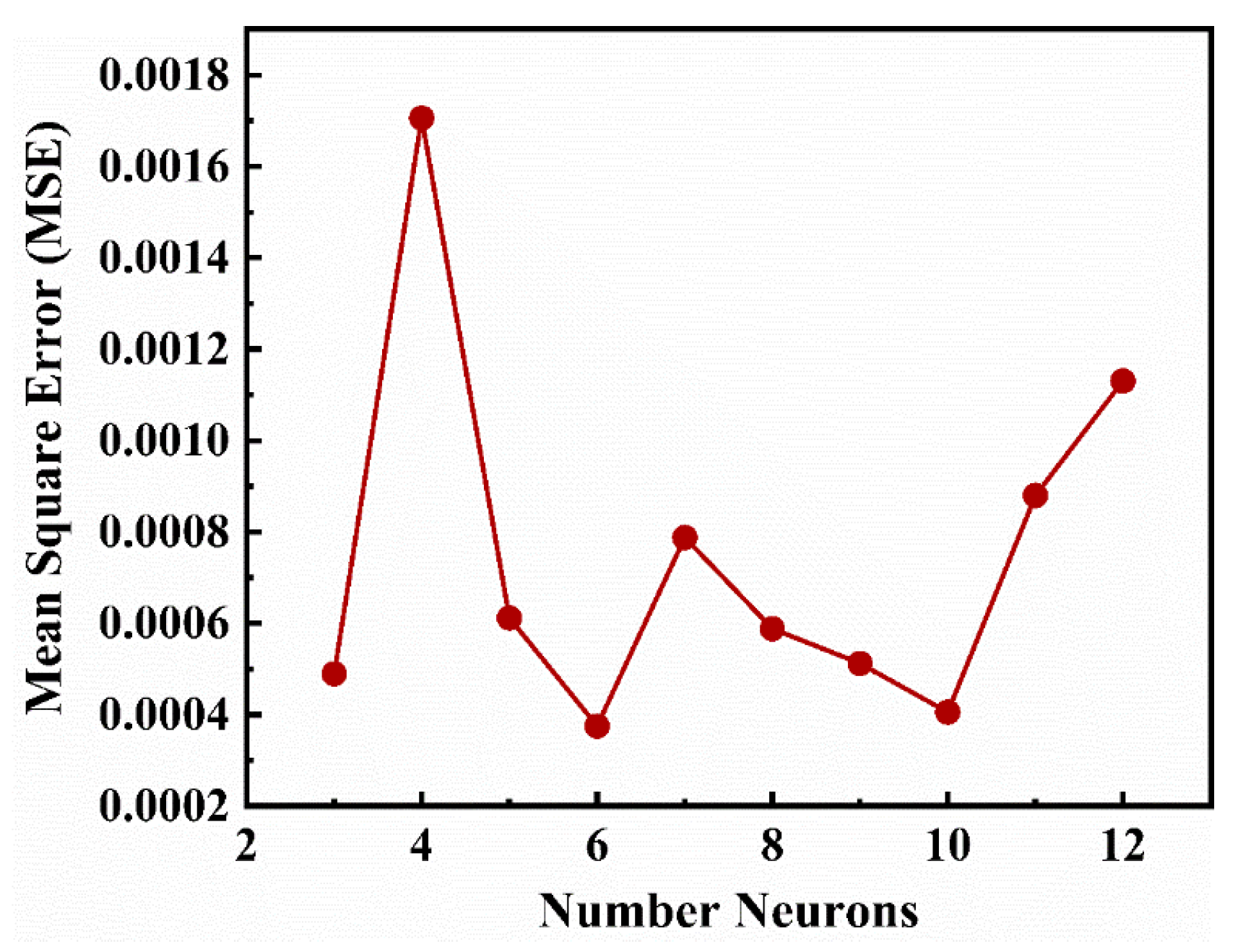
4. BP Network Model Build and Optimize
5. GA Optimizing BP
6. Result and Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ran, Y.; Deng, Y.; Hu, T.; Su, C.; Liu, X. Energy efficient thermoelectric generator-powered localized air-conditioning system applied in a heavy-duty vehicle. J. Energy Resour. Technol. 2018, 140, 072007. [Google Scholar] [CrossRef]
- Angeline, A.A.; Asirvatham, L.G.; Hemanth, D.J.; Jayakumar, J.; Wongwises, S. Performance prediction of hybrid thermoelectric generator with high accuracy using artificial neural networks. Sustain. Energy Technol. Assess. 2019, 33, 53–60. [Google Scholar] [CrossRef]
- Yu, S.H.; Du, Q.; Diao, H.; Shu, G.Q.; Jiao, K. Effect of vehicle driving conditions on the performance of thermoelectric generator. Energy Convers. Manag. 2015, 96, 363–376. [Google Scholar] [CrossRef]
- Luo, D.; Liu, Z.; Yan, Y.; Li, Y.; Wang, R.; Zhang, L.; Yang, X. Recent advances in modeling and simulation of thermoelectric power generation. Energy Convers. Manag. 2022, 273, 116389. [Google Scholar] [CrossRef]
- Gai, X.; Wu, S.; Yang, C. Hydrothermal fluid ejector for enhanced heat transfer of a thermoelectric power generator on the seafloor. Sustain. Energy Fuels 2021, 5, 4377–4388. [Google Scholar] [CrossRef]
- Luo, D.; Yan, Y.; Chen, W.H.; Yang, X.; Chen, H.; Cao, B.; Zhao, Y. A comprehensive hybrid transient CFD-thermal resistance model for automobile thermoelectric generators. Int. J. Heat Mass Transf. 2023, 211, 124203. [Google Scholar] [CrossRef]
- Niu, Z.; Diao, H.; Yu, S.; Jiao, K.; Du, Q.; Shu, G. Investigation and design optimization of exhaust-based thermoelectric generator system for internal combustion engine. Energy Convers. Manag. 2014, 85, 85–101. [Google Scholar] [CrossRef]
- Lu, C.; Wang, S.; Chen, C.; Li, Y. Effects of heat enhancement for exhaust heat exchanger on the performance of thermoelectric generator. Appl. Therm. Eng. 2015, 89, 270–279. [Google Scholar] [CrossRef]
- Kim, T.Y.; Kwak, J.; Kim, B.W. Application of compact thermoelectric generator to hybrid electric vehicle engine operating under real vehicle operating conditions. Energy Convers. Manag. 2019, 201, 112150. [Google Scholar] [CrossRef]
- Crane, D.; LaGrandeur, J.; Jovovic, V.; Ranalli, M.; Adldinger, M.; Poliquin, E.; Dean, J.; Kossakovski, D.; Mazar, B.; Maranville, C. TEG on-vehicle performance and model validation and what it means for further TEG development. J. Electron. Mater. 2013, 42, 1582–1591. [Google Scholar] [CrossRef]
- Deng, Y.; Fan, T.; Guo, X.; Ling, K.; Dai, H.; Su, C. Arrangement of TEG Device and Thermoelectric Module. J. Wuhan Univ. Technol. 2010, 32, 265–267, +283. [Google Scholar]
- Jouhara, H.; Żabnieńska-Góra, A.; Khordehgah, N.; Doraghi, Q.; Ahmad, L.; Norman, L.; Axcell, B.; Wrobel, L.; Dai, S. Thermoelectric generator (TEG) technologies and applications. Int. J. Thermofluids 2021, 9, 100063. [Google Scholar] [CrossRef]
- Shen, Z.G.; Liu, X.; Chen, S.; Wu, S.Y.; Xiao, L.; Chen, Z.X. Theoretical analysis on a segmented annular thermoelectric generator. Energy 2018, 157, 297–313. [Google Scholar] [CrossRef]
- Ge, Y.; Liu, Z.; Sun, H.; Liu, W. Optimal design of a segmented thermoelectric generator based on three-dimensional numerical simulation and multi-objective genetic algorithm. Energy 2018, 147, 1060–1069. [Google Scholar] [CrossRef]
- Chen, W.H.; Chiou, Y.B. Geometry design for maximizing output power of segmented skutterudite thermoelectric generator by evolutionary computation. Appl. Energy 2020, 274, 115296. [Google Scholar] [CrossRef]
- Selimefendigil, F.; Öztop, H.F. Thermoelectric generation in bifurcating channels and efficient modeling by using hybrid CFD and artificial neural networks. Renew. Energy 2021, 172, 582–598. [Google Scholar] [CrossRef]
- Wang, P.; Wang, K.F.; Xi, L.; Gao, R.X.; Wang, B.L. Fast and Accurate Performance Prediction and Optimization of Thermoelectric Generators with Deep Neural Networks. Adv. Mater. Technol. 2021, 6, 2100011. [Google Scholar] [CrossRef]
- Zhu, Y.; Newbrook, D.W.; Dai, P.; De Groot, C.; Huang, R. Artificial neural network enabled accurate geometrical design and optimisation of thermoelectric generator. Appl. Energy 2022, 305, 117800. [Google Scholar] [CrossRef]
- Ang, Z.Y.A.; Woo, W.L.; Mesbahi, E. Artificial neural network based prediction of energy generation from thermoelectric generator with environmental parameters. J. Clean Energy Technol. 2017, 5, 458–463. [Google Scholar] [CrossRef]
- Kim, T.Y. Prediction of System-Level Energy Harvesting Characteristics of a Thermoelectric Generator Operating in a Diesel Engine Using Artificial Neural Networks. Energies 2021, 14, 2426. [Google Scholar] [CrossRef]
- Quan, R.; Tang, X.; Quan, S.; Huang, L. A novel optimization method for the electric topology of thermoelectric modules used in an automobile exhaust thermoelectric generator. J. Electron. Mater. 2013, 42, 1469–1475. [Google Scholar] [CrossRef]
- Angeline, A.A. Power generation from combusted “syngas” using hybrid thermoelectric generator and forecasting the performance with ann technique. J. Therm. Eng. 2018, 4, 2149–2168. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Z.; Liu, L. Prediction and fitting of weld morphology of Al alloy-CFRP welding-rivet hybrid bonding joint based on GA−BP neural network. J. Manuf. Process. 2021, 63, 109–120. [Google Scholar] [CrossRef]
- Ciylan, B. Determination of output parameters of a thermoelectric module using artificial neural networks. Elektron. Ir Elektrotechnika 2011, 116, 63–66. [Google Scholar] [CrossRef]
- Ahmadizar, F.; Soltanian, K.; AkhlaghianTab, F.; Tsoulos, I. Artificial neural network development by means of a novel combination of grammatical evolution and genetic algorithm. Eng. Appl. Artif. Intell. 2015, 39, 1–13. [Google Scholar] [CrossRef]
- Maduabuchi, C.; Alanazi, M.; Alzahmi, A. Accurate prophecy of photovltaic-segmented thermoelectric generator’s performance using a neural network that feeds on finite element-generated data. Sustain. Energy Grids Netw. 2022, 32, 100905. [Google Scholar] [CrossRef]
- Kishore, R.A.; Mahajan, R.L.; Priya, S. Combinatory finite element and artificial neural network model for predicting performance of thermoelectric generator. Energies 2018, 11, 2216. [Google Scholar] [CrossRef]
- Kumar, R.R.; Dhanarajan, G.; Sarkar, D.; Sen, R. Multi-fold enhancement in sustainable production of biomass, lipids and biodiesel from oleaginous yeast: An artificial neural network-genetic algorithm approach. Sustain. Energy Fuels 2020, 4, 6075–6084. [Google Scholar] [CrossRef]
- Yu, H.; Yin, A.; Xu, Z.; Zhang, J.; Wu, J.; Xu, X.; Zhang, Z. Grain size characterization of TA1 with GA−BP neural network using laser ultrasonics. Optik 2023, 275, 170600. [Google Scholar] [CrossRef]
- Massaguer, A.; Massaguer, E. Faster and more accurate simulations of thermoelectric generators through the prediction of the optimum load resistance for maximum power and efficiency points. Energy 2021, 226, 120248. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, Q.; Wang, Z.; Xiong, J. The investigation into the failure criteria of concrete based on the BP neural network. Eng. Fract. Mech. 2022, 275, 108835. [Google Scholar] [CrossRef]
- Cao, H.; Liu, L.; Wu, B.; Gao, Y.; Qu, D. Process optimization of high-speed dry milling UD-CF/PEEK laminates using GA−BP neural network. Compos. Part B Eng. 2021, 221, 109034. [Google Scholar] [CrossRef]
- Hazare, S.R.; Patil, C.S.; Vala, S.V.; Joshi, A.J.; Joshi, J.B.; Vitankar, V.S.; Patwardhan, A.W. Predictive analysis of gas hold-up in bubble column using machine learning methods. Chem. Eng. Res. Des. 2022, 184, 724–739. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tc | Th | vw | OV | OP | Tc | Th | vw | OV | OP |
|---|---|---|---|---|---|---|---|---|---|
| 35 | 100 | 1.2 | 143.52 | 23.48 | 65 | 100 | 1.2 | 88.80 | 12.50 |
| 35 | 100 | 2.1 | 149.82 | 25.20 | 65 | 100 | 2.1 | 91.80 | 13.38 |
| 35 | 100 | 3.0 | 152.34 | 26.21 | 65 | 100 | 3.0 | 92.82 | 14.16 |
| 35 | 120 | 1.2 | 181.50 | 32.18 | 65 | 120 | 1.2 | 125.34 | 18.08 |
| 35 | 120 | 2.1 | 186.24 | 33.70 | 65 | 120 | 2.1 | 130.02 | 19.50 |
| 35 | 120 | 3.0 | 190.02 | 34.98 | 65 | 120 | 3.0 | 131.82 | 20.46 |
| 35 | 140 | 1.2 | 209.52 | 38.78 | 65 | 140 | 1.2 | 162.42 | 25.64 |
| 35 | 140 | 2.1 | 211.02 | 40.04 | 65 | 140 | 2.1 | 168.84 | 28.02 |
| 35 | 140 | 3.0 | 217.68 | 42.00 | 65 | 140 | 3.0 | 171.54 | 29.28 |
| 35 | 160 | 1.2 | 240.30 | 48.56 | 65 | 160 | 1.2 | 202.26 | 35.86 |
| 35 | 160 | 2.1 | 250.56 | 51.78 | 65 | 160 | 2.1 | 208.20 | 37.50 |
| 35 | 160 | 3.0 | 253.02 | 53.42 | 65 | 160 | 3.0 | 211.74 | 39.54 |
| 35 | 180 | 1.2 | 273.12 | 58.76 | 65 | 180 | 1.2 | 239.04 | 44.42 |
| 35 | 180 | 2.1 | 281.16 | 62.22 | 65 | 180 | 2.1 | 245.28 | 47.04 |
| 35 | 180 | 3.0 | 287.58 | 65.22 | 65 | 180 | 3.0 | 249.96 | 49.20 |
| 35 | 200 | 1.2 | 306.84 | 70.58 | 65 | 200 | 1.2 | 275.70 | 56.12 |
| 35 | 200 | 2.1 | 311.70 | 72.96 | 65 | 200 | 2.1 | 287.46 | 60.18 |
| 35 | 200 | 3.0 | 317.22 | 75.66 | 65 | 200 | 3.0 | 293.28 | 65.78 |
| 35 | 220 | 1.2 | 331.56 | 79.60 | 65 | 220 | 1.2 | 314.88 | 70.76 |
| 35 | 220 | 2.1 | 337.32 | 82.56 | 65 | 220 | 2.1 | 323.40 | 73.56 |
| 35 | 220 | 3.0 | 346.80 | 87.36 | 65 | 220 | 3.0 | 328.62 | 76.44 |
| 50 | 100 | 1.2 | 112.50 | 15.75 | 80 | 100 | 1.2 | 66.06 | 9.20 |
| 50 | 100 | 2.1 | 113.94 | 17.05 | 80 | 100 | 2.1 | 67.32 | 10.30 |
| 50 | 100 | 3.0 | 114.84 | 18.47 | 80 | 100 | 3.0 | 69.18 | 11.28 |
| 50 | 120 | 1.2 | 143.88 | 21.56 | 80 | 120 | 1.2 | 107.40 | 14.42 |
| 50 | 120 | 2.1 | 144.60 | 22.92 | 80 | 120 | 2.1 | 111.42 | 15.60 |
| 50 | 120 | 3.0 | 145.38 | 24.36 | 80 | 120 | 3.0 | 112.38 | 16.74 |
| 50 | 140 | 1.2 | 175.62 | 28.33 | 80 | 140 | 1.2 | 134.52 | 18.98 |
| 50 | 140 | 2.1 | 177.96 | 29.70 | 80 | 140 | 2.1 | 138.00 | 20.10 |
| 50 | 140 | 3.0 | 179.22 | 31.08 | 80 | 140 | 3.0 | 140.64 | 21.42 |
| 50 | 160 | 1.2 | 213.66 | 38.12 | 80 | 160 | 1.2 | 185.40 | 30.08 |
| 50 | 160 | 2.1 | 216.54 | 39.17 | 80 | 160 | 2.1 | 190.14 | 31.68 |
| 50 | 160 | 3.0 | 218.88 | 40.58 | 80 | 160 | 3.0 | 193.68 | 33.30 |
| 50 | 180 | 1.2 | 252.00 | 47.24 | 80 | 180 | 1.2 | 222.06 | 39.86 |
| 50 | 180 | 2.1 | 261.06 | 49.82 | 80 | 180 | 2.1 | 231.30 | 43.44 |
| 50 | 180 | 3.0 | 267.60 | 53.76 | 80 | 180 | 3.0 | 233.82 | 44.94 |
| 50 | 200 | 1.2 | 291.60 | 61.52 | 80 | 200 | 1.2 | 258.90 | 52.32 |
| 50 | 200 | 2.1 | 295.32 | 64.02 | 80 | 200 | 2.1 | 265.92 | 55.02 |
| 50 | 200 | 3.0 | 303.06 | 67.92 | 80 | 200 | 3.0 | 271.68 | 56.58 |
| 50 | 220 | 1.2 | 326.88 | 74.00 | 80 | 220 | 1.2 | 309.12 | 62.84 |
| 50 | 220 | 2.1 | 334.08 | 77.58 | 80 | 220 | 2.1 | 317.64 | 65.98 |
| 50 | 220 | 3.0 | 341.28 | 81.42 | 80 | 220 | 3.0 | 325.26 | 67.87 |
| Category | MSE | MAPE | |
|---|---|---|---|
| OV | BP | 187.85 | 8.50% |
| GA−BP | 21.36 | 2.28% | |
| OP | BP | 84.19 | 25.79% |
| GA−BP | 1.27 | 2.83% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Sun, P.; Wu, J.; Zhang, Y.; Wu, J.; Liu, G.; Hu, H.; Hu, J.; Tan, X.; He, S.; et al. GA−BP Prediction Model for Automobile Exhaust Waste Heat Recovery Using Thermoelectric Generator. Processes 2023, 11, 1498. https://0-doi-org.brum.beds.ac.uk/10.3390/pr11051498
Li F, Sun P, Wu J, Zhang Y, Wu J, Liu G, Hu H, Hu J, Tan X, He S, et al. GA−BP Prediction Model for Automobile Exhaust Waste Heat Recovery Using Thermoelectric Generator. Processes. 2023; 11(5):1498. https://0-doi-org.brum.beds.ac.uk/10.3390/pr11051498
Chicago/Turabian StyleLi, Fei, Peng Sun, Jianlin Wu, Yin Zhang, Jiehua Wu, Guoqiang Liu, Haoyang Hu, Jun Hu, Xiaojian Tan, Shi He, and et al. 2023. "GA−BP Prediction Model for Automobile Exhaust Waste Heat Recovery Using Thermoelectric Generator" Processes 11, no. 5: 1498. https://0-doi-org.brum.beds.ac.uk/10.3390/pr11051498