1. Introduction
Tissue engineering is one of the most dynamic and rapidly expanding fields in biomedical sciences. It merges the expertise and skills of different areas such as biology, physics, biochemistry, and engineering. Generally speaking, tissue engineering focuses on combining cells with supporting synthetic or naturally derived biomaterials that essentially act as scaffolds for tissue formation in vitro by allowing cells to adhere, proliferate, migrate, differentiate, and produce new tissue [
1]. In the last decades, there has been a growing awareness that cells and tissues sense the surrounding environment, decoding physical stimuli into biological responses. For this reason, advanced tissue engineering technologies also involve the application of biophysical stimuli, such as mechanical, electrical, or magnetic signals, on the engineered constructs through the use of a bioreactor [
2,
3,
4,
5].
Skeletal muscle tissue is largely present in the human body. Due to its anatomy and function, it is subject to several physical stimuli, among which the mechanical one is certainly the most important. The pivotal role of mechano-transduction in conditioning muscle cell behavior has been demonstrated [
6,
7,
8], and several muscle regeneration studies in vitro involve the use of bioreactors capable of delivering mechanical (cyclic or continuous) stimuli to influence cellular behavior and alignment on engineered scaffolds, but also to induce the formation of functional muscle fibers [
9,
10]. Mechanical stimulation regimens may be tuned in terms of loading direction, strain level, and time-dependent factors, such as loading–unloading frequency and rest period between subsequent strain cycles [
11]. The use of these protocols is complex and typically requires custom-designed bioreactors for specific biomaterial scaffolds and the chosen application. Many bioreactors provide a mechanical stimulation along a unique direction, allowing the development of oriented 3D muscle bundles that are often able to contract [
12,
13,
14]. This type of approach leads to in vitro production of constructs with aligned muscular fibers in a preferred direction, recapitulating the anatomy of most skeletal muscles. Instead, the development of bioreactors for biaxial or radial stimulation is less common in the literature [
15].
Different myopathies, including muscular dystrophies, affect all the muscles in the body. Among these, one of the most involved muscle is diaphragm [
16,
17], a muscular septum responsible for breathing. Unlike other muscles, the diaphragm has a particular muscle fiber arrangement: starting from a single large central tendon, myofibers radiate outwards to anchor the rib cage and separate the thoracic and the abdominal cavities [
18,
19]. Along with myopathies, other injuries such as diaphragm accidental damages or tissue resections can also occur, prompting the need for diaphragmatic muscle constructs to be used as drug screening platforms for muscle diseases or to be applied in vivo as biologic substitutes. In this regard, decellularized diaphragmatic muscle can be used as a scaffold seeded with muscle cells and mechanically stimulated in a radial manner. This mode of mechanical stimulation can enhance cells alignment and induce the formation of radial muscular fibers, mimicking the fiber orientation in the healthy diaphragm. A similar approach has been already adopted for the development of engineered tissues that are expected to undergo biaxial loading conditions in vivo [
20,
21,
22]. However, the size of the obtained scaffold is generally in the order of 1 cm
2 or smaller, while diaphragm defects can be extended in the range of between 5% and 20% of the overall muscle area [
23] in most clinical cases. In this context, diaphragmatic constructs with an area in the order of at least 5 cm
2 or bigger can be considered clinically relevant.
The aim of this work is to design a bioreactor able to mechanically stimulate porcine-derived diaphragmatic scaffolds in a radial manner for promoting cell alignment and development of radially oriented muscular fibers in clinically relevant diaphragmatic constructs. For this purpose, a Finite Element (FE) model of the bioreactor is developed, and numerical analyses are carried out to evaluate the optimal configuration for the mechanical stimulation of engineered tissue patches. Two different methods to obtain a stable connection between the bioreactor membrane and the muscular tissue patch are compared, namely, suturing and clamping with pliers. The evaluation of the overall mechanical behavior of the system is targeted to the selection of the best bioreactor configuration, focusing on tissue strain during mechanical stimulation, in order to ensure efficient mechano-transduction and at the same to prevent time tissue damage.
2. Materials and Methods
2.1. Bioreactor Concept and FE Model
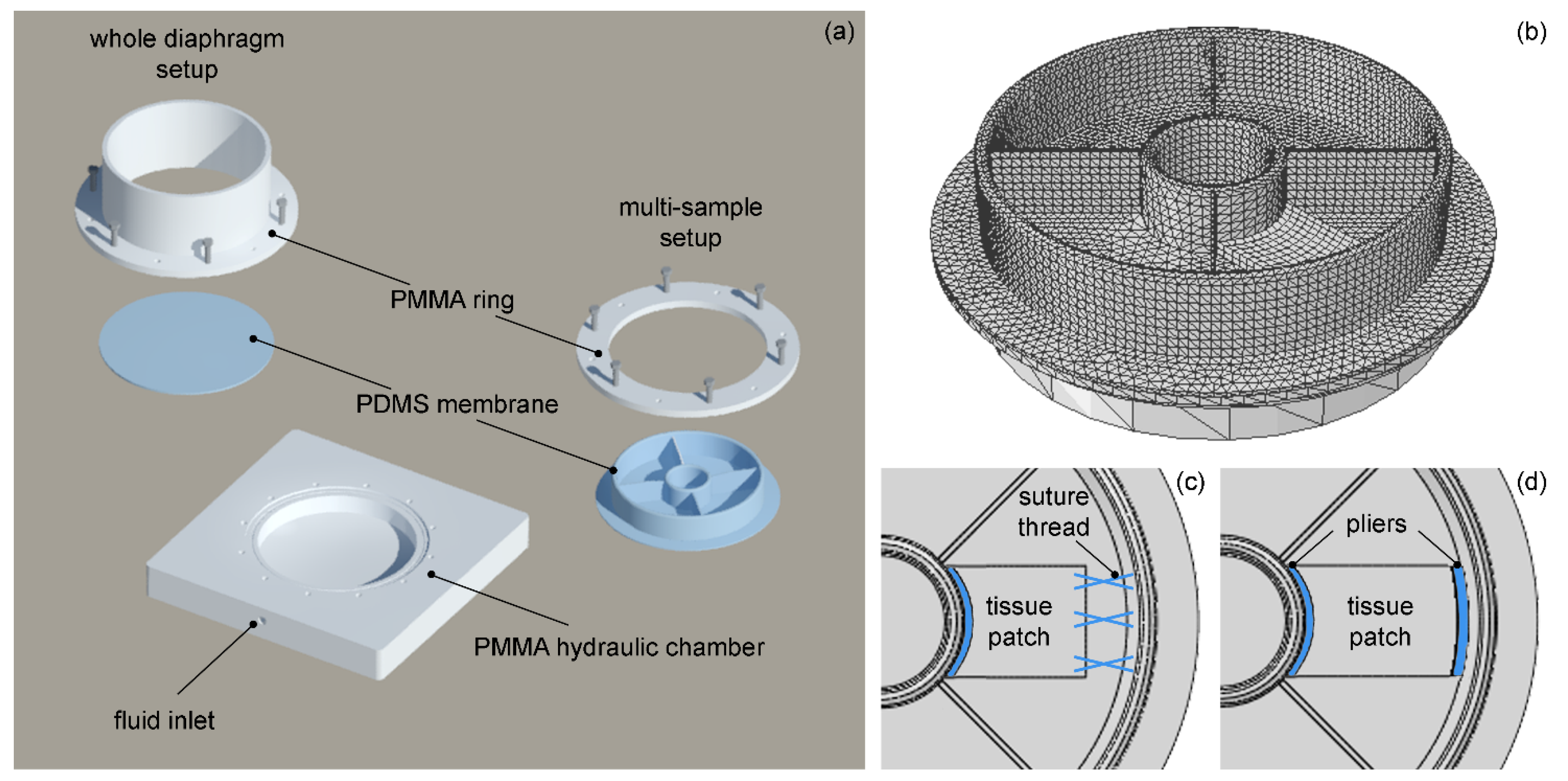
The scheme of the bioreactor structure is shown in
Figure 1a. The bioreactor is composed of a hydraulic chamber made of polymethylmethacrylate (PMMA) and filled with liquid through a peristaltic pump. A thin circular membrane (diameter 116 mm, thickness 1 mm) of polydimethylsiloxane (PDMS) is positioned on the upper part of the chamber and clamped with a PMMA ring. The inflation of the system induces a mechanical stretch of the membrane and, therefore, the stimulation of the muscular tissue fixed on its upper surface. The circular shape of the membrane is designed to potentially ensure radial mechanical stretch of a whole piglet diaphragmatic muscle, even though smaller tissue patches are generally required for diaphragm repair.
Depending on specific requirements of different clinical cases, suitable tissue patches can be positioned in any part of the membrane surface. While a flat PDMS membrane is used for whole diaphragm stimulation; in the case of a multi-sample stimulation, a different set-up is adopted, with a membrane composed of four separators and two concentric rings. The separators allow one to hold the culture medium where the muscular tissue will be immersed during the whole mechanical stimulation phase. The rings create an anchor point to prevent sample displacement; they have the same thickness (3 mm) and a different size: for the internal and the external ring, respectively, the height is equal to 13.5 and 16 mm, while the inner diameter is equal to 24 and 110 mm.
To find the optimal solution for attaching the muscular tissue to the rings on the membrane, in the FE model obtained from the geometry (
Figure 1b) two configurations are considered, using either suture thread (
Figure 1c) or pliers (
Figure 1d). The two pliers (height 3 mm, thickness 2 mm) match the internal and the external rings and can be obtained by 3D printing of polylactic acid (PLA). A rectangular tissue patch is positioned on the bioreactor membrane and slightly different tissue sizes are considered in the two configurations for modeling purposes only (thickness 3 mm; width × length: 26 × 20 m—with suture, 30.5 × 18 mm—with pliers).
The FE models of bioreactor and muscular tissue are developed with the software ABAQUS CAE (version 6.14-5, Dassault Systems, Vélizy-Villacoublay Cedex, France). The whole model consists of about 89,000 elements and 67,000 nodes. For the two pliers and the muscular tissue, hexahedral elements with a structured technique are used, while all the other parts are meshed using tetrahedral elements with free technique. Finite elements with hybrid formulation are adopted for materials with almost incompressible behavior to avoid numerical instabilities.
2.2. Experimental Testing of Diaphragmatic Muscular Tissue
Diaphragmatic muscles of pigs (
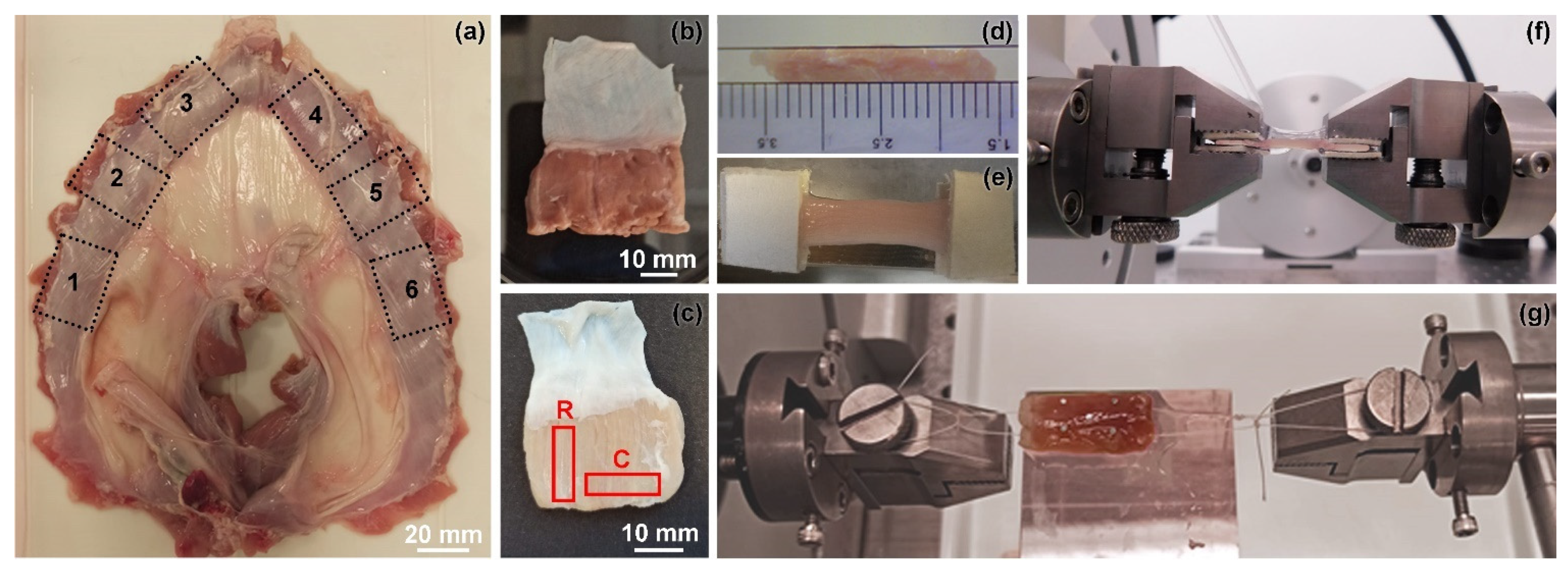
Sus scrofa) destined for the food market have been purchased from Interspar (Aspiag Service S.r.l., Padova, Italy), and no live animal has been sacrificed for this research. After purchase, each diaphragm is cut to obtain 6 patches, as shown in
Figure 2a. Diaphragmatic patches are decellularized following a consolidated procedure [
24,
25] in order to obtain reproducible diaphragmatic scaffolds.
Fresh diaphragm patches are kept at −20 °C and defrosted approximately 1 h before mechanical testing by immersion in physiological solution (PBS, Phosphate Buffered Solution, Sigma-Aldrich, Merck KGaA, Darmstadt, Germany) at room temperature. Starting from fresh (
Figure 2b) and decellularized (
Figure 2c) tissue patches, rectangular samples with total length of about 20 mm and average width of 3 mm are cut along the radial and the circumferential directions. Tissue thickness is measured by means of the image processing software ImageJ (version 1.53c, U. S. National Institutes of Health, Bethesda, Rockville, MD, USA) [
26] from side view pictures of each samples (
Figure 2d). From the diaphragm patches, a total number of 22 rectangular samples is obtained for mechanical testing.
Tensile tests are carried out on fresh and decellularized diaphragms through Bose ElectroForce® Planar Biaxial Test Bench instrument (TA Instruments, New Castle, DE, USA) under displacement control with a precision of ±0.001 mm, using a load cell of 22 N with a precision of ±0.02 N.
All the tests are performed at room temperature (25 ± 1 °C). A sample gauge length of 10 mm is selected to ensure a mean aspect ratio (length/width) of about 3 [
27]. The ends of each sample are attached between two patches of balsa wood and clamped by the grips (
Figure 2e). Tensile tests are developed at a constant elongation rate of 0.2 mm·s
−1, corresponding to a strain rate of 2% s
−1, up to 30% of maximum strain. The maximum strain is chosen to evaluate the mechanical behavior of both native and decellularized diaphragmatic muscle in a broad strain range, fully including physiological loading conditions [
28,
29].
Additional tensile tests are carried out on four samples of fresh diaphragmatic muscle, two of which include a portion of the adjacent tendon to evaluate the effect of tissue-suture interaction. In these tests, rectangular samples (width × length: 8 × 16.5 mm) are attached to two suture threads (Prolene
® 5-0, RB-1 needle, Cat. No. 8556, Ethicon LLC., Cincinnati, OH, USA) at each side, at a distance of about 13.5 mm; the sutures are then clamped to the grips (
Figure 2f). The sample is placed on a smooth PMMA surface wet by a thin layer of PBS solution so as to reduce possible friction tangential forces. Tensile tests consist of five consecutive loading–unloading cycles at a constant rate of 1 mm·s
−1 up to a maximum displacement of 2 mm for each side of the sample, corresponding to a total elongation of 4 mm.
Nominal strain ε is measured as the ratio between the current displacement of the grips and the initial gauge length of the sample, while nominal stress P is calculated as the ratio between the current force and the initial transversal area of the sample. The Cauchy stress σ is deduced from the value of nominal stress by assuming the incompressibility of the tissue. The values of secant elastic modulus ES are calculated at 30% strain for both fresh and decellularized tissue; the two groups are then compared with the Mann–Whitney U-test (significant p-value < 0.05).
2.3. Constitutive Models
2.3.1. Constitutive Model of Polymeric Materials
The main bioreactor chamber is made of PMMA, described using an isotropic linear elastic model, with Young’s modulus
E = 3100 MPa and Poisson’s ratio
ν = 0.35. Differently, the mechanical behavior of PDMS, composing membranes, separators and rings, is described using an isotropic hyperelastic neo-Hookean model defined by the following strain energy function:
where, starting from the right Cauchy–Green strain tensor
,
is the Jacobian of the deformation, and
is the first invariant of the iso-volumetric part of
. The constitutive model is a standard hyperelastic formulation included in the materials library of ABAQUS Standard (version 6.14-5, Dassault Systéms, Vélizy-Villacoublay Cedex, France). The constitutive parameters
and
are related to initial Young’s modulus
E = 1 MPa and Poisson’s ratio of
ν = 0.5. This constitutive model is combined with the use of solid elements with a hybrid formulation.
The mechanical behavior of PLA constituting the two pliers is modelled adopting an isotropic linear elastic constitutive model, with Young’s modulus E = 2000 MPa and Poisson’s ratio ν = 0.2.
2.3.2. Constitutive Model of Muscular Tissue
According to the anisotropic response of the decellularized diaphragmatic tissue, a fiber-reinforced hyperelastic formulation is defined with strain energy function defined as:
where
is a structural invariant defined as
,
being a unit vector representing the radial direction of the ECM derived tissue in the undeformed configuration [
30]. The set of constitutive parameters
is obtained fitting the stress–strain function derived by Equation (2) to the uniaxial average stress–strain data obtained by experimental tests along the radial and circumferential direction. The optimization procedure is based on a user-routine developed in the open source software Scilab (version 6.1.0, Esi Group, Paris, France) [
31,
32]. The parameter
is used as penalty value to ensure the almost incompressibility of the material. The constitutive model is implemented in a Fortran user subroutine and combined with the use of hybrid formulation solid elements.
2.4. Loading and Boundary Conditions
The outer part of the membrane lays directly against the main chamber containing the liquid, and is made of an annulus with an internal diameter of 100 mm and an external one of 116 mm. It is fixed, and displacement is stuck in every direction since only the central portion corresponding to a 100 mm diameter will be inflated during the mechanical stimulation phase. The muscular tissue can freely move on the upper membrane, and a hard contact formulation is used between tissue and membrane to avoid surface penetration in the normal direction.
Two different solutions are considered to grip the tissue patch to the bioreactor membrane: in the first case, the usage of a suture thread is simulated to connect the tissue to the two rings, while in the second case, two pliers are introduced in the numerical model. In the first configuration, the tissue is attached to the internal ring using a specific function that ties separate surfaces together avoiding relative motion between them, while it is connected with the outer ring by means of a pinned rigid link between two nodes: one on the tissue and the other on the membrane, where the suture thread is secured. In the second configuration, the connection between the muscular edges and the two pliers is simulated by means of tie constraint to connect the element both to the internal and to the external ring. The two pliers are stuck on the rings and the muscular tissue is attached to them, while both can slide freely on the surface of the upper membrane in the tangential direction; also in this case, a hard contact formulation is used between the tissue and membrane.
Non-linear static numerical analyses are carried out with ABAQUS Standard (version 6.14-5, Dassault Systéms, Vélizy-Villacoublay Cedex, France) to simulate mechanical stimulation of a tissue patch. To model the liquid-filled structure behavior, a hydraulic fluid cavity is used and a pressure up to 0.012 MPa is applied on it, so as to cause inflation of the membranes and the consequent stretch of the muscular tissue. This pressure value was preliminary obtained through the use of simplified FE models to select the pressure able to inflate the membrane at a desired strain level. In spite of the fact that the numerical analysis is developed with pressure control, while the real experimental setup is programmed to run with volume control, the numerical results obtained are usable because the unique relationship between pressure and change of volume is obtained from numerical analysis.
3. Results
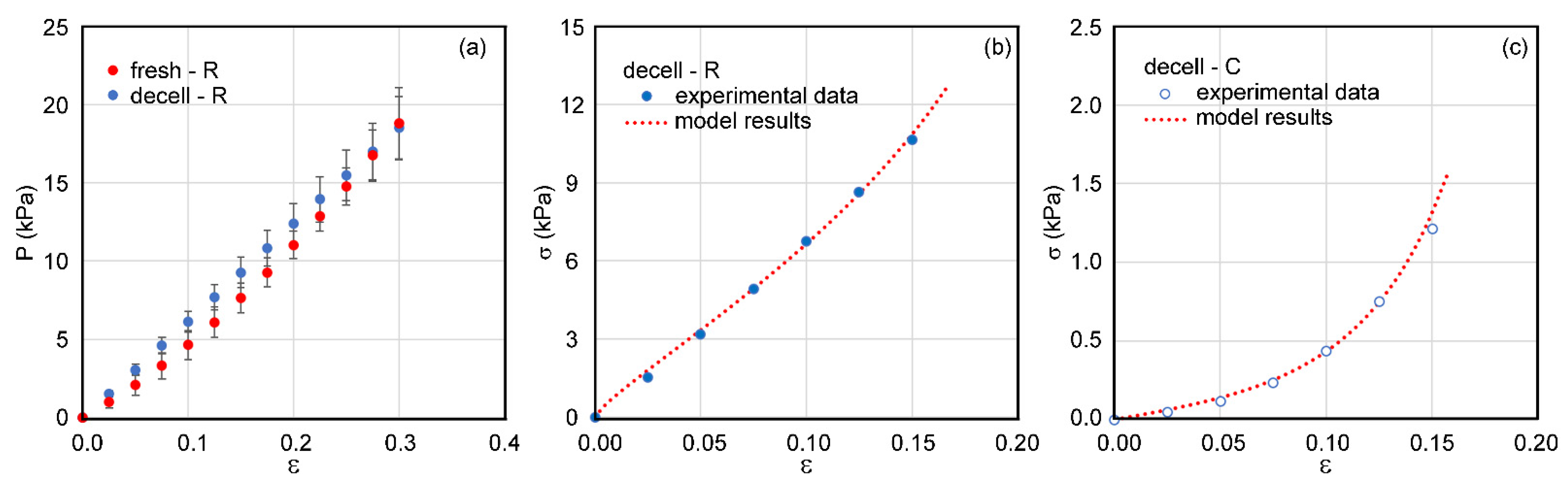
The tensile behavior of fresh and decellularized diaphragmatic tissue is shown in
Figure 3, and the corresponding values of the secant modulus
ES are reported in
Table 1.
The mean values of the nominal stress of fresh and decellularized tissue in the radial direction (
Figure 3a) are comparable in all the strain ranges of experimental tests, and the difference of the secant modulus in the two groups is not statistically significant according to the Mann–Whitney U-test (
p-value > 0.66).
The mechanical behavior of diaphragmatic muscle is strongly anisotropic, as highlighted by the tensile data for the decellularized tissue in radial and circumferential directions (
Figure 3a,b). This anisotropic behavior is described by means of a fiber-reinforced hyperelastic model with the constitutive parameters reported in
Table 2. The comparison of experimental data and numerical curves is shown in
Figure 3a,b.
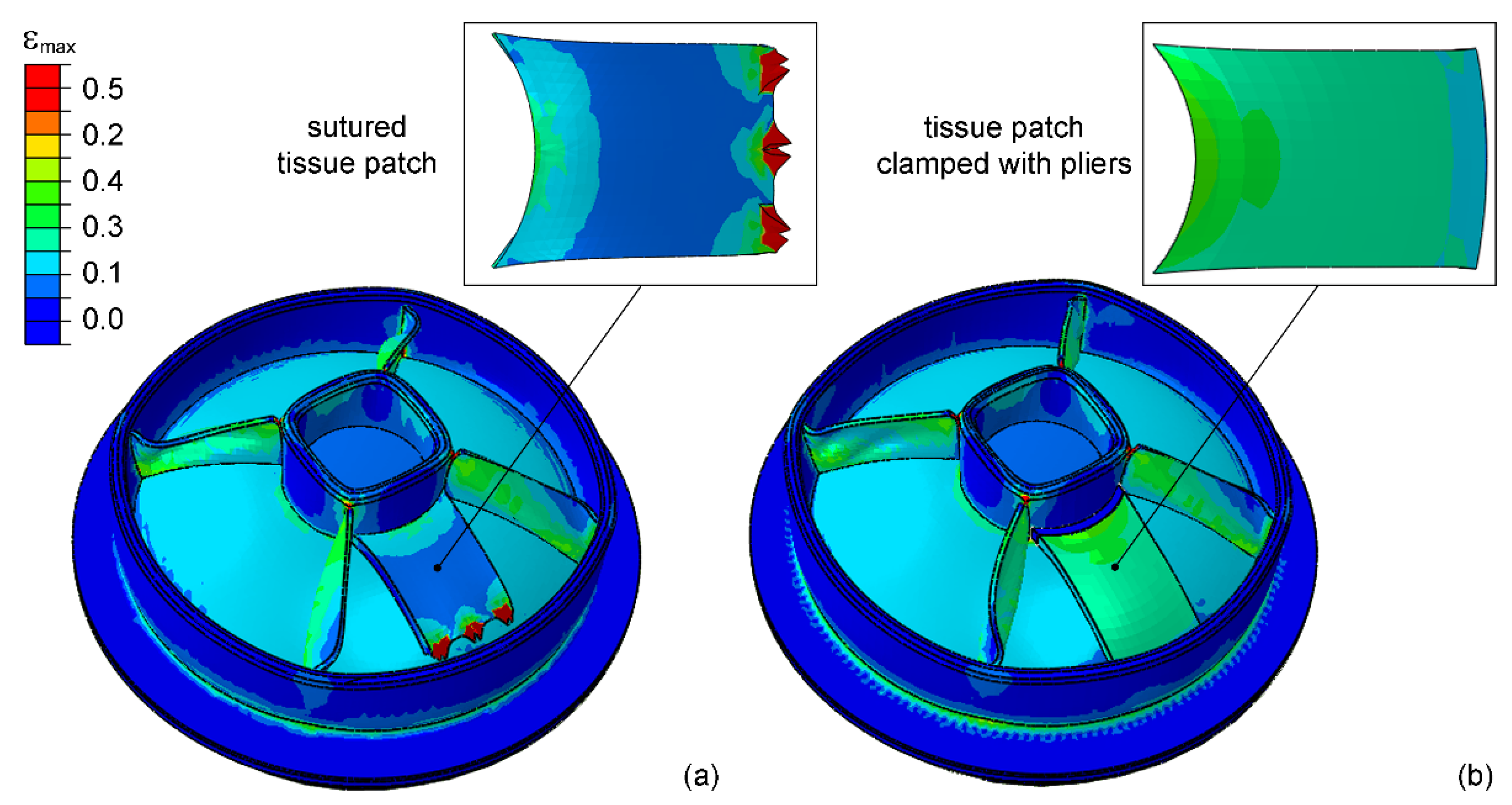
The contour of maximum principal strains of the bioreactor membrane with a muscular tissue patch either attached with suture thread or clamped by means of pliers is reported in
Figure 4. In the first configuration, most of the surface of the tissue patch is deformed at 5–10% strain, while very high strain is measured in the region of suture, reaching 100% strain in some points. Contrarily, in the second configuration, a more homogeneous strain in the range between 30 and 35% is found on the overall surface of the tissue patch. Numerical results in the latter case also allow one to verify that the strain remains homogeneous at a lower intensity of membrane inflation.
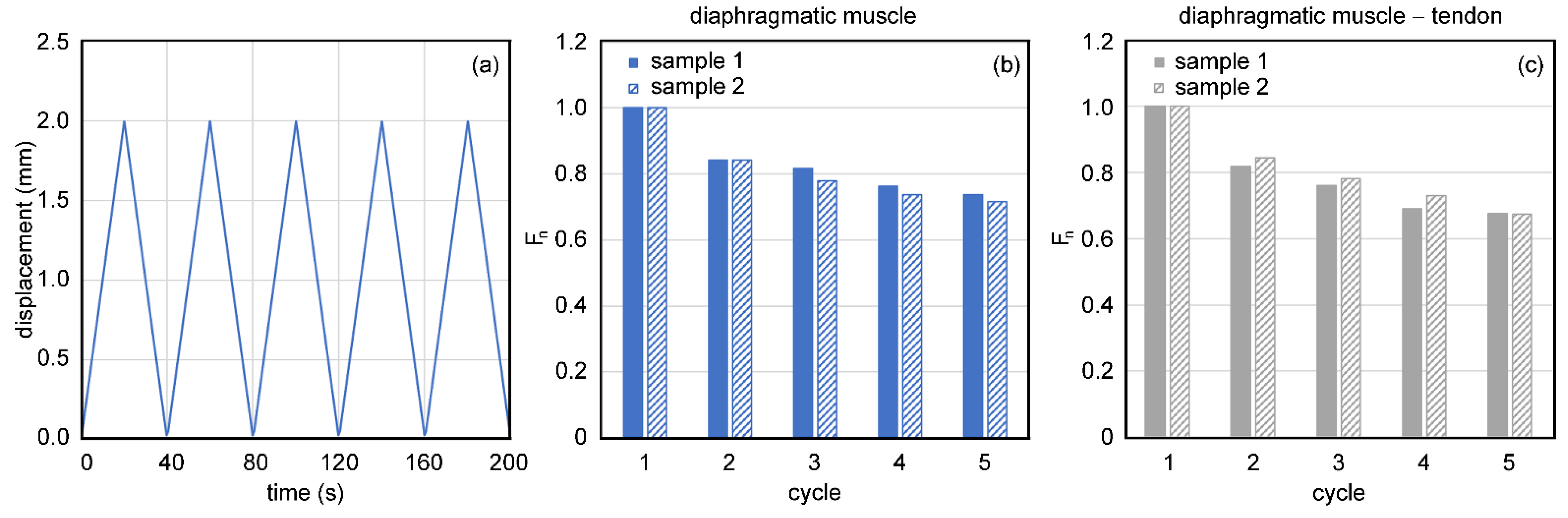
In
Figure 5, the results of cyclic tensile loading of diaphragmatic muscle tissue attached with sutures are presented. At each cycle, when a maximum displacement of 2 mm is applied by each motor, a peak value of force is measured. The peak values of force are normalized to the maximum value measured during the first loading cycle for each sample and reported for all subsequent cycles. A strong decrease in measured force is evident both in the case of muscular samples (normalized force is decreased to 73% of the initial value after five cycles) and muscle connected to tendon (decreased to 68% of the initial value).
4. Discussion
The production of an engineered tissue in vitro with a mechanical stimulation requires precise control of the level of applied strain. This task is not easy to achieve for different reasons, in particular, the complex morphology of the structures and the nonlinear behavior of involved tissues. In addition, during stimulation it is not easy to provide a continuous measurement of mechanical variables, such as local strains. Therefore, it is necessary to provide a system in which the strain in the tissue is deduced indirectly from other quantities that can be easily and accurately controlled. In our approach, the basic control of the system is made through the inflation of a PDMS membrane with an inlet of incompressible fluid in a hydraulic chamber. By means of FE simulations, we have also obtained the relationship (not reported in the text) between inflated volume and consequent strains of the stimulated tissue, deformed by the membrane. The programming of a modulated mechanical stimulus of the tissue is then reconducted to the programming of the fluid volume inlet over time, for the usual experiments, obtained with a peristaltic pump controlled by user-defined software.
This is achieved by means of an FE model including the real geometry of the bioreactor and a rectangular tissue patch. Even though the circular surface of the bioreactor membrane is designed for the whole piglet diaphragm stimulation, a total diaphragmatic muscle replacement is very uncommon in clinical cases, while local muscular impairment due to myopathies, accidental damages, or tissue resections may occur more frequently [
33,
34] and result in the need for patient-specific tissue patches. According to these requirements, the bioreactor membrane is designed also for multi-sample stimulation and the specific case of a rectangular tissue patch is investigated in the present work.
In the FE model, a fiber-reinforced hyperelastic model is assumed to describe the strongly anisotropic response of decellularized diaphragmatic muscle, based on the results of experimental tests. As highlighted by the comparison between fresh and decellularized diaphragmatic tissue stress–strain behavior, the decellularization process does not alter the mechanical properties of diaphragmatic tissue. This finding is also supported by previous studies where murine samples were analyzed and compared from a biological and biomechanical point of view [
25]. During stimulation, cell growth and alignment inside the decellularized tissue patch is envisaged, aiming at the formation of functional muscular fibers. In the event of successful regeneration, the tissue patch is expected to gradually assume the mechanical properties of the healthy muscular tissue. In this case, no relevant variations of the mechanical response are expected during mechanical stimulation.
The selection of the tissue gripping method may be challenging and is one of the aspects evaluated in the present work by means of FE analysis. Sutures are commonly adopted for tissue repair, but their usage under cyclic loading may be critical due to the possible stress concentration at suture points. For this reason, pliers are considered as an alternative gripping method allowing the distribution of stress on the sides of the gripped tissue. The numerical results confirm that the use of pliers can ensure a stable connection between the bioreactor membrane and the tissue patch, allowing its stimulation at a homogenous strain level on its overall surface. On the contrary, the use of suture thread leads to regions of high strain level that could cause complete laceration. This effect is consistent with the results of experimental tensile tests of tissue-suture systems, where a strong force decrease is found among consecutive loading–unloading cycles. Such decrease is ascribable to local tissue breakage due to the suture tearing action.
Some limitations of this study should be noted. First, the mechanical behavior of diaphragmatic muscle is not fully characterized. Biaxial tensile testing would allow one to better simulate multiaxial loading conditions that are experienced by the tissue both in vivo and during the stimulation phase, while we have provided only uniaxial tests in the radial and circumferential behavior. Nonetheless, this characterization can be considered acceptable for the purpose of the work. The viscoelastic behavior of the muscular tissue has been neglected; however, this is considered a marginal limitation, since the strain rate considered in the experimental evaluation is close to the strain rate of the loading-unloading protocol during stimulation. On the other hand, the increase in the strain rate would have only the effect of higher stiffness of the tissue. Nonetheless, since the latter is highly compliant, its deformation induced during the inflation of the PDMS membrane cannot change with respect to what reported in the numerical simulations presented.
Despite the mentioned limitations, the computational approach adopted in this study shows good potentialities in supporting the design of bioreactors for mechanical stimulation of engineered scaffolds, also considering different tissue patch geometries and different loading conditions according to specific applications.
5. Conclusions
In this work, a novel bioreactor for the radial mechanical stimulation of diaphragmatic scaffolds is designed, aiming at the development of engineered tissues with enhanced cell alignment and radially oriented muscular fibers. These constructs may be used as biological substitutes to repair diaphragmatic defects in different clinical conditions. A computational approach is used to optimize the system, considering the complex geometry and the nonlinear behavior of muscular tissue. Two different methods are compared to connect a muscular tissue patch to the bioreactor membrane, and the use of pliers is selected for robust clamping ensuring a homogenous strain on the entire surface of the tissue patch. The evaluation of the overall mechanical behavior of the system allows one to tune the level of tissue strain during mechanical stimulation and may be extended to any patch size and geometry.
Author Contributions
Conceptualization, M.P. and P.G.P.; methodology, P.G.P.; software, S.T., S.S. and P.G.P.; validation, S.S. and P.G.P.; formal analysis, S.T., S.S. and P.G.P.; investigation, E.M. and P.G.P.; resources, M.P. and P.G.P.; data curation, S.T. and S.S.; writing—original draft preparation, S.T. and S.S.; writing—review and editing, M.P. and P.G.P.; visualization, S.T.; supervision, P.G.P.; funding acquisition, M.P. and P.G.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Fondazione Cassa di Risparmio di Padova e Rovigo (CARIPARO), grant ID: Ricerca Pediatrica 2016-2018, “STEAD for CDH” project, and by the University of Padova, grant ID: Uni-Impresa 2018, “BIOXEN” project.
Institutional Review Board Statement
Ethical review and approval were waived for this study, because no live animal was sacrificed for this research. Experiments were performed on animal tissues destined for the food market, purchased from Interspar (Aspiag Service S.r.l., Padova, Italy).
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Langer, R.; Vacanti, J.P. Tissue engineering. Science 1993, 260, 920–926. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, Z.; Matsumoto, T.; Nomura, Y.; Nakamura, T. An electro-tensile bioreactor for 3-D culturing of cardiomyocytes. IEEE Eng. Med. Biol. Mag. 2005, 24, 73–79. [Google Scholar] [CrossRef] [PubMed]
- Llucià-Valldeperas, A.; Soler-Botija, C.; Gálvez-Montón, C.; Roura, S.; Prat-Vidal, C.; Perea-Gil, I.; Sanchez, B.; Bragos, R.; Vunjak-Novakovic, G.; Bayes-Genis, A. Electromechanical conditioning of adult progenitor cells improves recovery of cardiac function after myocardial infarction. Stem Cells Transl. Med. 2017, 6, 970–981. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, T.; Rosenthal, D.; Reinhartz, O.; Riemer, K.; He, F.; Hsia, T.Y.; Marsden, A.; Kung, E. Modeling of Congenital Hearts Alliance (MOCHA)+ Investigators. Superior performance of continuous over pulsatile flow ventricular assist devices in the single ventricle circulation: A computational study. J. Biomech. 2017, 52, 48–54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Urbani, L.; Camilli, C.; Phylactopoulos, D.E.; Crowley, C.; Natarajan, D.; Scottoni, F.; Maghsoudlou, P.; McCann, C.J.; Pellegata, A.P.; Urciuolo, A.; et al. Multi-stage bioengineering of a layered oesophagus with in vitro expanded muscle and epithelial adult progenitors. Nat. Commun. 2018, 9, 4286. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bruyère, C.; Versaevel, M.; Mohammed, D.; Alaimo, L.; Luciano, M.; Vercruysse, E.; Gabriele, S. Actomyosin contractility scales with myoblast elongation and enhances differentiation through YAP nuclear export. Sci. Rep. 2019, 9, 15565. [Google Scholar] [CrossRef] [Green Version]
- Li, E.W.; McKee-Muir, O.C.; Gilbert, P.M. Cellular Biomechanics in Skeletal Muscle Regeneration. In Current Topics in Developmental Biology; Sassoon, D., Ed.; Academic Press: Cambridge, MA, USA, 2018; pp. 125–176. [Google Scholar]
- Vandenburgh, H.H. Dynamic mechanical orientation of skeletal myofibers in vitro. Dev. Biol. 1982, 93, 438–443. [Google Scholar] [CrossRef]
- Moon Du, G.; Christ, G.; Stitzel, J.D.; Atala, A.; Yoo, J.J. Cyclic mechanical preconditioning improves engineered muscle contraction. Tissue Eng. Part A 2008, 14, 473–482. [Google Scholar] [CrossRef]
- Bansai, S.; Morikura, T.; Onoe, H.; Miyata, S. Effect of Cyclic Stretch on Tissue Maturation in Myoblast-Laden Hydrogel Fibers. Micromachines 2019, 10, 399. [Google Scholar] [CrossRef] [Green Version]
- Somers, S.M.; Spector, A.A.; Di Girolamo, D.J.; Grayson, W.L. Biophysical stimulation for engineering functional skeletal muscle. Tissue Eng. Part B Rev. 2017, 23, 362–372. [Google Scholar] [CrossRef]
- Fleming, J.W.; Capel, A.J.; Rimington, R.P.; Wheeler, P.; Leonard, A.N.; Bishop, N.C.; Davies, O.G.; Lewis, M.P. Bioengineered human skeletal muscle capable of functional regeneration. BMC Biol. 2020, 18, 145. [Google Scholar] [CrossRef]
- Somers, S.M.; Zhang, N.Y.; Morrissette-McAlmon, J.B.F.; Tran, K.; Mao, H.-Q.; Grayson, W.L. Myoblast maturity on aligned microfiber bundles at the onset of strain application impacts myogenic outcomes. Acta Biomater. 2019, 94, 232–242. [Google Scholar] [CrossRef]
- Kasper, A.M.; Turner, D.C.; Martin, N.R.W.; Sharples, A.P. Mimicking exercise in three-dimensional bioengineered skeletal muscle to investigate cellular and molecular mechanisms of physiological adaptation. J. Cell. Physiol. 2018, 233, 1985–1998. [Google Scholar] [CrossRef]
- Ravichandran, A.; Liu, Y.; Teoh, S.H. Review: Bioreactor design towards generation of relevant engineered tissues: Focus on clinical translation. J. Tissue Eng. Regen. Med. 2018, 12, e7–e22. [Google Scholar] [CrossRef]
- Borges Lessa, T.; de Abreu, D.K.; Bertassoli, B.M.; Ambrósio, C.E. Diaphragm: A vital respiratory muscle in mammals. Ann. Anat. 2016, 205, 122–127. [Google Scholar] [CrossRef]
- Mosqueira, M.; Zeiger, U.; Förderer, M.; Brinkmeier, H.; Fink, R.H.A. Cardiac and respiratory dysfunction in Duchenne muscular dystrophy and the role of second messengers. Med. Res. Rev. 2013, 33, 1174–1213. [Google Scholar] [CrossRef] [PubMed]
- Fogarty, M.J.; Sieck, G.C. Evolution and functional differentiation of the diaphragm muscle of mammals. Compr. Physiol. 2019, 9, 715–766. [Google Scholar]
- Pickering, M.; Jones, J.F.X. The diaphragm: Two physiological muscles in one. J. Anat. 2002, 201, 305–312. [Google Scholar] [CrossRef]
- Dahl, S.L.; Kypson, A.P.; Lawson, J.H.; Blum, J.L.; Strader, J.T.; Li, Y.; Manson, R.J.; Tente, W.E.; Di Bernardo, L.; Hensley, M.T.; et al. Readily available tissue-engineered vascular grafts. Sci. Transl. Med. 2011, 3, 68ra9. [Google Scholar] [CrossRef] [PubMed]
- Niklason, L.E.; Gao, J.; Abbott, W.M.; Hirschi, K.K.; Houser, S.; Marini, R.; Langer, R. Functional arteries grown in vitro. Science 1999, 284, 489–493. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soltow, Q.A.; Zeanah, E.H.; Lira, V.A.; Criswell, D.S. Cessation of cyclic stretch induces atrophy of C2C12 myotubes. Biochem. Biophys. Res. Commun. 2013, 434, 316–321. [Google Scholar] [CrossRef]
- Rygl, M.; Kuklova, P.; Zemkova, D.; Slaby, K.; Pycha, K.; Stranak, Z.; Melichar, J.; Snajdauf, J. Defect-diaphragmatic ratio: A new parameter for assessment of defect size in neonates with congenital diaphragmatic hernia. Pediatr. Surg. Int. 2012, 28, 971–976. [Google Scholar] [CrossRef] [PubMed]
- Piccoli, M.; Trevisan, C.; Maghin, E.; Franzin, C.; Pozzobon, M. Mouse skeletal muscle decellularization. In Decellularized Scaffolds and Organogenesis. Methods in Molecular Biology, 1st ed.; Turksen, K., Ed.; Humana Press: New York, NY, USA, 2017; Volume 1577, pp. 87–93. [Google Scholar]
- Piccoli, M.; Urbani, L.; Alvarez-Fallas, M.E.; Franzin, C.; Dedja, A.; Bertin, E.; Zuccolotto, G.; Rosato, A.; Pavan, P.; Elvassore, N.; et al. Improvement of diaphragmatic performance through orthotopic application of decellularized extracellular matrix patch. Biomaterials 2016, 74, 245–255. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. NIH Image to ImageJ: 25 years of image analysis. Nat. Methods 2012, 9, 671–675. [Google Scholar] [CrossRef] [PubMed]
- Pavan, P.G.; Pachera, P.; Todros, S.; Tiengo, C.; Natali, A.N. Mechanical characterization of animal derived grafts for surgical implantation. J. Mech. Med. Biol. 2016, 16, 1650023. [Google Scholar] [CrossRef]
- Boriek, A.M.; Wilson, T.A.; Rodarte, J.R. Displacements and strains in the costal diaphragm of the dog. J. Appl. Physiol. 1985, 76, 223–229. [Google Scholar] [CrossRef]
- Ye, X.; Xiao, H.; Bai, W.; Liang, Y.; Chen, M.; Zhang, S. Two-dimensional strain ultrasound speckle tracking as a novel approach for the evaluation of right hemidiaphragmatic longitudinal deformation. Exp. Ther. Med. 2013, 6, 368–372. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Todros, S.; Pachera, P.; Baldan, N.; Pavan, P.G.; Pianigiani, S.; Merigliano, S.; Natali, A.N. Computational modeling of abdominal hernia laparoscopic repair with a surgical mesh. Int. J. Comput. Assist. Radiol. Surg. 2018, 13, 73–81. [Google Scholar] [CrossRef]
- de Almeida, E.S.; Medeiros, A.C.; Frery, A.C. How good are MatLab, Octave and Scilab for computational modelling? Comput. Appl. Math. 2012, 31, 523–538. [Google Scholar] [CrossRef] [Green Version]
- de Cesare, N.; Trevisan, C.; Maghin, E.; Piccoli, M.; Pavan, P.G. A finite element analysis of diaphragmatic hernia repair on an animal model. J. Mech. Behav. Biomed. 2018, 86, 33–42. [Google Scholar] [CrossRef]
- Sekusky, A.L.; Lopez, R.A. Diaphragm Trauma. In StatPearls; StatPearls Publishing: Treasure Island, FL, USA, 2020. [Google Scholar]
- Solli, P.; Brandolini, J.; Pardolesi, A.; Nardini, M.; Lacava, N.; Parri, S.; Kawamukai, K.; Bonfanti, B.; Bertolaccini, L. Diaphragmatic and pericardial reconstruction after surgery for malignant pleural mesothelioma. J. Thorac. Dis. 2021, 10, S298–S303. [Google Scholar] [CrossRef] [PubMed] [Green Version]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}