


Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals

Abstract
:1. Introduction
2. Literature Review
3. Problem Description and Formulation
3.1. Assumptions
- Any piece of equipment can handle one container at a time.
- The scheduling of a QC and the allocation of export containers are known;
- QCs are homogeneous and have the same buffer capacity;
- Each YC serves a specific yard block and contains one type of container, export or import;
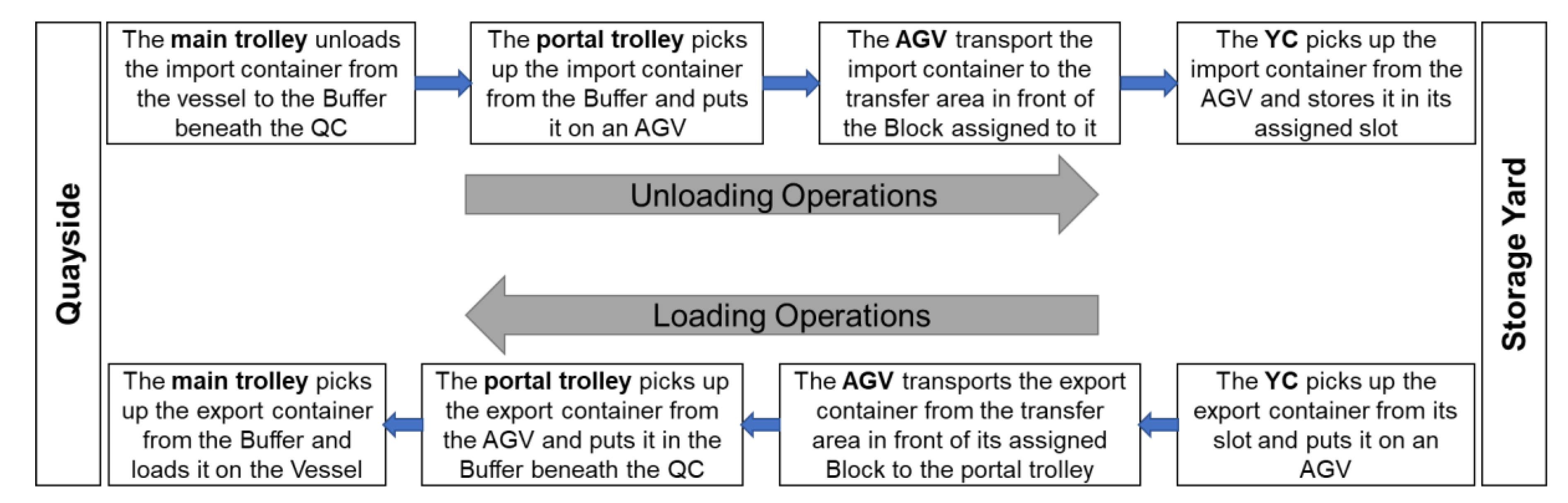
- There are four different conditions for any two consecutive containers handled by the same equipment; AGV, QC’s main trolley, or QC’s portal trolley:
- Handling two consecutive import containers;
- Handling two consecutive export containers;
- Handling an export container before an import one;
- Handling an import container before an export one.
3.2. Notations
3.2.1. Sets and Parameters
| Set of QCs. | |
| Set of YCs. | |
| Set of yard blocks. | |
| Set of available slots in each block. | |
| Set of yard locations. | |
| Set of all containers. Each container is defined by its number and its assigned quay crane. | |
| Set of import containers (jobs), | |
| Set of export containers (jobs), | |
| Set of the containers in the buffer beneath each quay crane, | |
| Set of all containers beside the starting dummy container. | |
| Set of all containers beside the ending dummy container. | |
| Set of all containers, including dummy starting and ending jobs. | |
| Indices for QCs. | |
| Indices for blocks. | |
| Indices for the available slots in each block. | |
| Indices for containers (jobs), job means that container is handled by quay crane , and job means that container is handled by quay crane . | |
| Dummy starting job. | |
| Dummy ending job. | |
| Indices for yard locations, location is slot n in block b, and location is slot in block . | |
| Handling time of container by the main trolley of its assigned quay carne. | |
| Handling time of container by the portal trolley of its assigned quay crane. | |
| The transportation time of AGV for export container from its assigned block to its assigned quay crane. | |
| AGV’s transportation time from quay crane to block | |
| AGV’s transportation time between quay crane and quay crane . | |
| AGV’s traveling time from the block that container is located to block , . | |
| The handling time of YC to transfer export container from its assigned slot to the transfer point in front of its assigned block. | |
| The transportation time of YC between the transfer point of block b to the location | |
| YC’s transportation time from the assigned location of the import container to the assigned location of the import container . | |
| A large number | |
| The capacity of the buffer beneath each QC | |
| Total number of AGVs |
3.2.2. Decision Variables
| =1; if an AGV, scheduled to deliver the container , has just delivered container . =0; otherwise | |
| =1; if the import container is assigned to the location . =0; otherwise. | |
| =1; if the YC of block b is scheduled to handle both import containers and consecutively. =0; otherwise. | |
| =1; if a YC is scheduled to handle both export containers and consecutively. =0; otherwise. | |
| =1; if the job is located in the buffer beneath QC when the QC starts to handle job =0; otherwise. |
3.2.3. Decision Variables
| The starting time of the main trolley of quay crane k to handle container i | |
| The starting time of the portal trolley of quay crane k to handle container i | |
| The starting time of YC to handle container (i,k) | |
| =1; if block b is assigned to the import container (i,k). =0; otherwise. It is an intermediated variable: | |
| The quay crane k’s waiting time to start handling container i | |
| The AGV’s waiting time until quay crane k starts to handle container i | |
| =1; if there is an available slot in the buffer beneath quay crane l when the QC starts to handle job j =0; otherwise. |
3.3. Mathematical Model
4. Results and Discussion
- Investigating the effect of the integrating the scheduling of YCs and AGVs considering the limited QCs buffer capacity on completion time, AGV utilization, and QC utilization;
- Investigating the effects of using the QCs buffer capacity with different sizes;
- Investigating the impact of using single-trolley QCs instead of dual-trolley QCs.
4.1. Investigating the Effect of the Integrating the Scheduling of YCs and AGVs on Completion Time, AGV Utilization, and QC Utilization
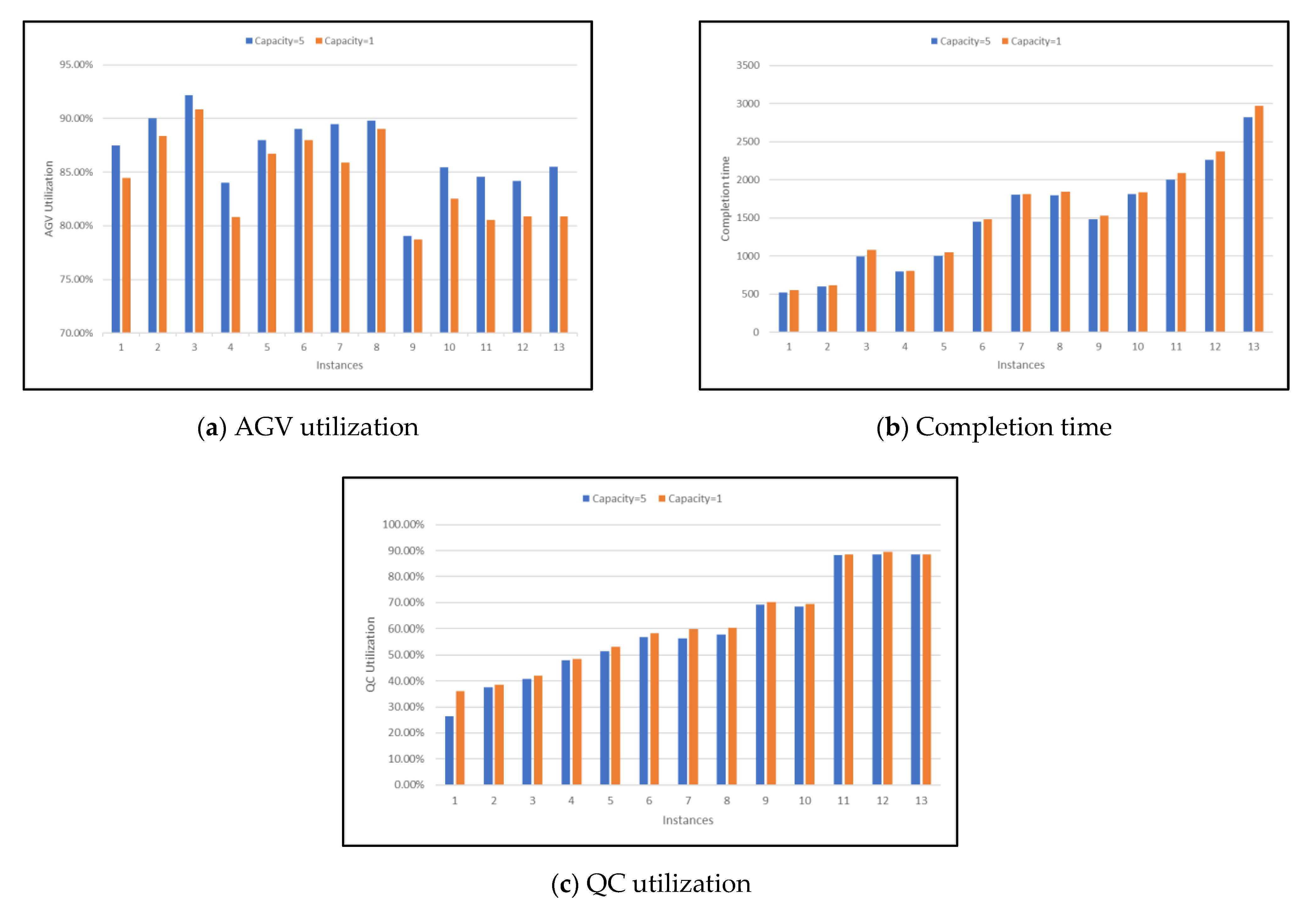
4.2. Investigating the Effect of Using the QC Buffer Capacity with Different Sizes
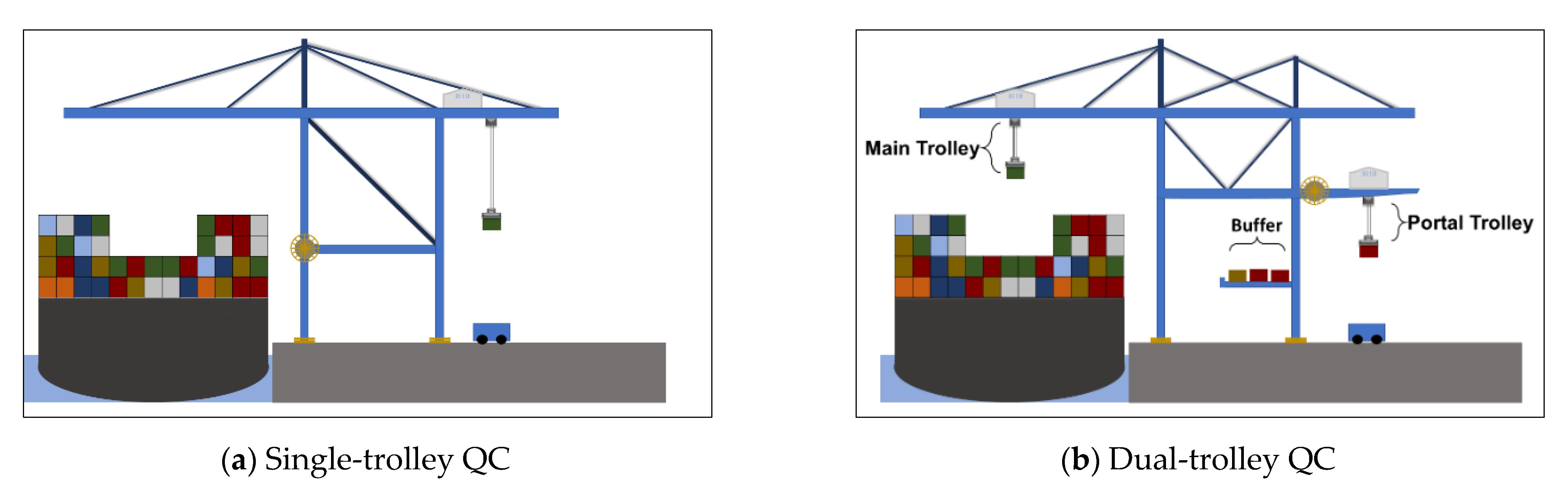
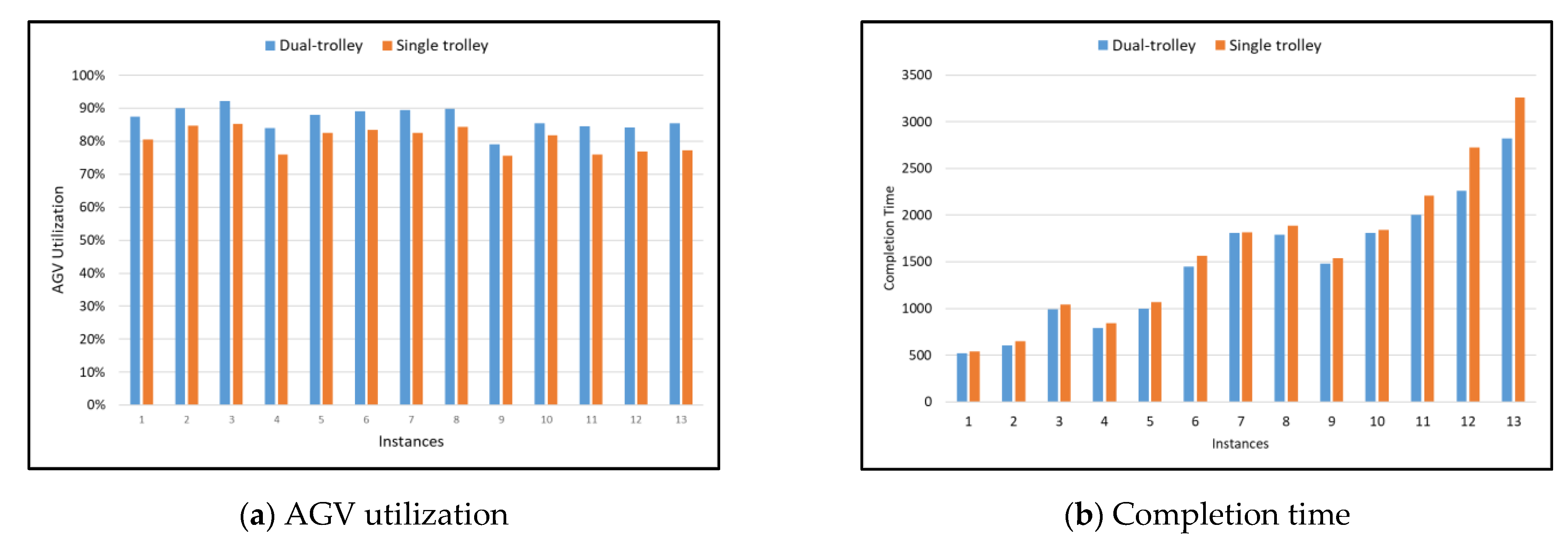
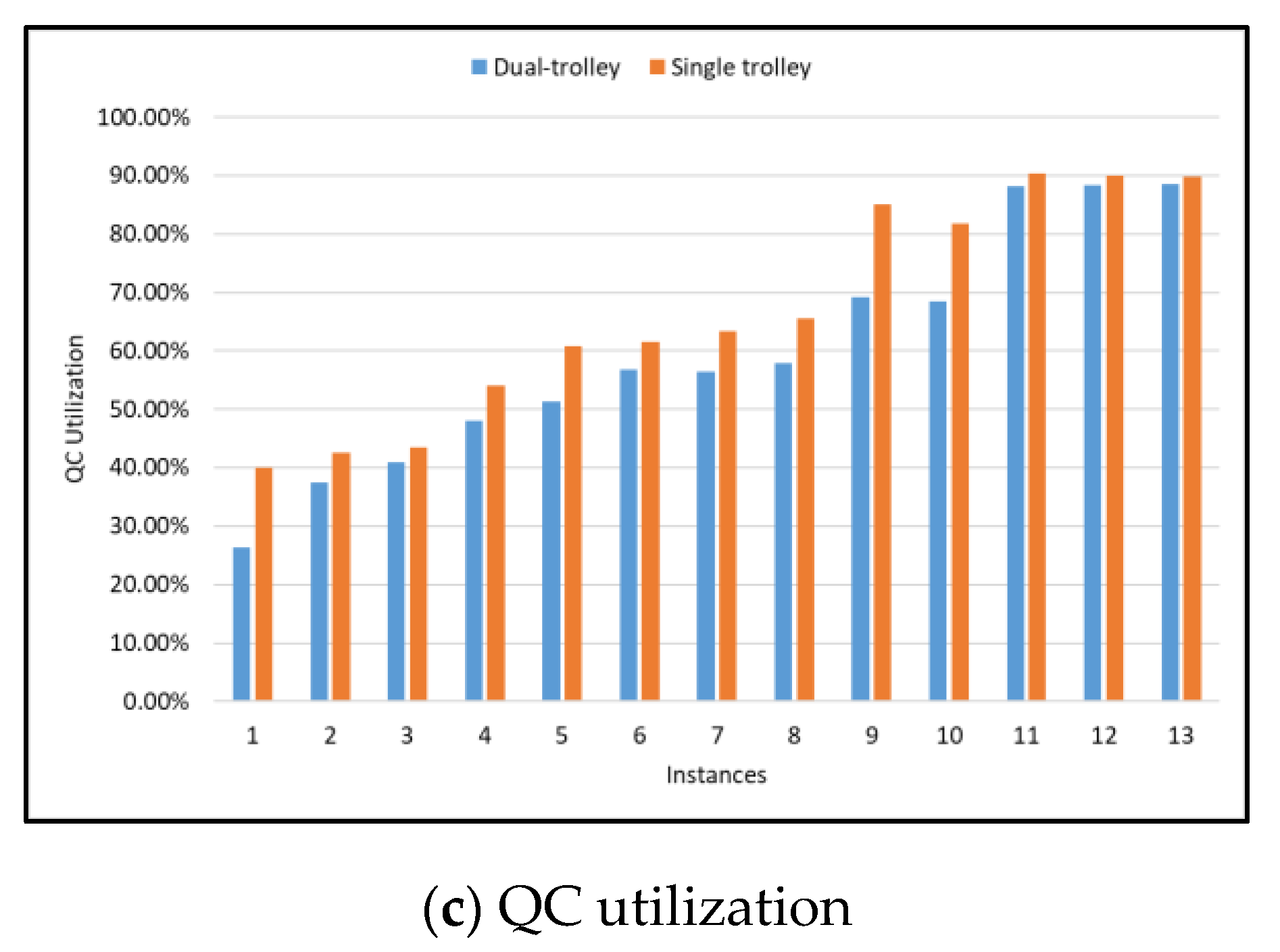
4.3. Investigating the Impact of Using Single-Trolley QCs Instead of Dual-Trolley QCs
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, E.S.; Goleman, D.; Boyatzis, R.; Mckee, A. Review of Maritime Transport 2020; United Nations: New York, NY, USA, 2020; Volume 53. [Google Scholar]
- Naeem, D.; Gheith, M.; Eltawil, A. Integrated Scheduling of AGVs and Yard Cranes in Automated Container Terminals. In Proceedings of the 2021 IEEE 8th International Conference on Industrial Engineering and Applications (ICIEA), Chengdu, China, 23–26 April 2021; pp. 632–636. [Google Scholar] [CrossRef]
- Lu, Y. The Three-Stage Integrated Optimization of Automated Container Terminal Scheduling Based on Improved Genetic Algorithm. Math. Probl. Eng. 2021, 2021, 6792137. [Google Scholar] [CrossRef]
- Hu, H.; Chen, X.; Wang, T.; Zhang, Y. A Three-Stage Decomposition Method for the Joint Vehicle Dispatching and Storage Allocation Problem in Automated Container Terminals. Comput. Ind. Eng. 2019, 129, 90–101. [Google Scholar] [CrossRef]
- Yu, H.; Deng, Y.; Zhang, L.; Xiao, X.; Tan, C. Yard Operations and Management in Automated Container Terminals: A Review. Sustainability 2022, 14, 3419. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y. Scheduling of Container-Handling Equipment during the Loading Process at an Automated Container Terminal. Comput. Ind. Eng. 2020, 149, 106848. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y.; Mendes, A.B. Modelling of Integrated Vehicle Scheduling and Container Storage Problems in Unloading Process at an Automated Container Terminal. Comput. Ind. Eng. 2016, 94, 32–44. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y. Modelling of Dual-Cycle Strategy for Container Storage and Vehicle Scheduling Problems at Automated Container Terminals. Transp. Res. Part E Logist. Transp. Rev. 2015, 79, 49–64. [Google Scholar] [CrossRef]
- Gheith, M.; Eltawil, A.B.; Harraz, N.A. Solving the Container Pre-Marshalling Problem Using Variable Length Genetic Algorithms. Eng. Optim. 2016, 48, 687–705. [Google Scholar] [CrossRef]
- Iris, Ç.; Pacino, D.; Ropke, S.; Larsen, A. Integrated Berth Allocation and Quay Crane Assignment Problem: Set Partitioning Models and Computational Results. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 75–97. [Google Scholar] [CrossRef] [Green Version]
- Li, C.-L. Managing Navigation Channel Traffic and Anchorage Area Utilization of a Container Port. Transp. Sci. 2019, 53, 728–745. [Google Scholar] [CrossRef]
- Jia, S.; Li, C.L.; Xu, Z. A Simulation Optimization Method for Deep-Sea Vessel Berth Planning and Feeder Arrival Scheduling at a Container Port. Transp. Res. Part B Methodol. 2020, 142, 174–196. [Google Scholar] [CrossRef]
- Li, S.; Jia, S. The Seaport Traffic Scheduling Problem: Formulations and a Column-Row Generation Algorithm. Transp. Res. Part B Methodol. 2019, 128, 158–184. [Google Scholar] [CrossRef]
- ElWakil, M.; Gheith, M.; Eltawil, A. A New Hybrid Salp Swarm-Simulated Annealing Algorithm for the Container Stacking Problem. In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems, Valletta, Malta, 22–24 February 2020; pp. 89–99. [Google Scholar] [CrossRef]
- Yue, L.; Fan, H.; Ma, M. Optimizing Configuration and Scheduling of Double 40 Ft Dual-Trolley Quay Cranes and AGVs for Improving Container Terminal Services. J. Clean. Prod. 2021, 292, 126019. [Google Scholar] [CrossRef]
- Karam, A.; Eltawil, A.B. Functional Integration Approach for the Berth Allocation, Quay Crane Assignment and Specific Quay Crane Assignment Problems. Comput. Ind. Eng. 2016, 102, 458–466. [Google Scholar] [CrossRef]
- Karam, A.; Eltawil, A.B. A Lagrangian Relaxation Approach for the Integrated Quay Crane and Internal Truck Assignment in Container Terminals. Int. J. Logist. Syst. Manag. 2016, 24, 113–136. [Google Scholar] [CrossRef]
- Sadeghian, S.H.; bin Mohd Ariffin, M.K.A.; Hong, T.S.; bt Ismail, N. Integrated Scheduling of Quay Cranes and Automated Lifting Vehicles in Automated Container Terminal with Unlimited Buffer Space. In Advances in Systems Science; Swiatek, J., Grzech, A., Swiątek, P., Tomczak, J.M., Eds.; Springer International Publishing: New York, NY, USA, 2014. [Google Scholar]
- Kress, D.; Meiswinkel, S.; Pesch, E. Straddle Carrier Routing at Seaport Container Terminals in the Presence of Short Term Quay Crane Buffer Areas. Eur. J. Oper. Res. 2019, 279, 732–750. [Google Scholar] [CrossRef]
- Castilla-Rodríguez, I.; Expósito-Izquierdo, C.; Melián-Batista, B.; Aguilar, R.M.; Moreno-Vega, J.M. Simulation-Optimization for the Management of the Transshipment Operations at Maritime Container Terminals. Expert. Syst. Appl. 2020, 139. [Google Scholar] [CrossRef]
- Duinkerken, M.B.; Evers, J.J.M.; Ottjes, J.A. A Simulation Model for Integrating Quay Transport and Stacking Policies on Automated Container Terminals. In Proceedings of the 15th European Simulation Multiconference, San Diego, CA, USA, 1 June 2001; pp. 909–916. [Google Scholar]
- Lau, H.Y.K.; Zhao, Y. Integrated Scheduling of Handling Equipment at Automated Container Terminals. Int. J. Prod. Econ. 2008, 112, 665–682. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An Integrated Scheduling Method for AGV Routing in Automated Container Terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Zhao, Q.; Ji, S.; Guo, D.; Du, X.; Wang, H. Research on Cooperative Scheduling of Automated Quayside Cranes and Automatic Guided Vehicles in Automated Container Terminal. Math. Probl. Eng. 2019, 2019, 6574582. [Google Scholar] [CrossRef]
- Yue, L.; Fan, H.; Zhai, C. Joint Configuration and Scheduling Optimization of the Dual Trolley Quay Crane and AGV for Automated Container Terminal. In Proceedings of the 2019 4th International Seminar on Computer Technology, Mechanical and Electrical Engineering (ISCME 2019), Chengdu, China, 13–15 December 2019; Volume 1486. [Google Scholar] [CrossRef]
- Li, H.; Peng, J.; Wang, X.; Wan, J. Integrated Resource Assignment and Scheduling Optimization with Limited Critical Equipment Constraints at an Automated Container Terminal. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7607–7618. [Google Scholar] [CrossRef]
- Xu, B.; Jie, D.; Li, J.; Yang, Y.; Wen, F.; Song, H. Integrated Scheduling Optimization of U-Shaped Automated Container Terminal under Loading and Unloading Mode. Comput. Ind. Eng. 2021, 162, 107695. [Google Scholar] [CrossRef]
- Lu, Y. The Optimization of Automated Container Terminal Scheduling Based on Proportional Fair Priority. Math. Probl. Eng. 2022, 2022, 7889048. [Google Scholar] [CrossRef]
- Qin, T.; Du, Y.; Chen, J.H.; Sha, M. Combining Mixed Integer Programming and Constraint Programming to Solve the Integrated Scheduling Problem of Container Handling Operations of a Single Vessel. Eur. J. Oper. Res. 2020, 285, 884–901. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instances | Number of Containers | AGV/YC | Optimum Solution | |||||
|---|---|---|---|---|---|---|---|---|
| Computational Time (s) | Completion Time (s) | Average AGV Waiting Time (s) | Average QC Waiting Time (s) | AGV Utilization (%) | QC Utilization (%) | |||
| 1 | 5 | 2/2 | 0.016 | 519 | 64.95 | 382 | 87.49 | 26.40 |
| 2 | 6 | 2/2 | 0.021 | 602 | 60 | 376 | 90.03 | 37.54 |
| 3 | 10 | 2/2 | 0.202 | 994 | 78 | 588 | 92.15 | 40.85 |
| 4 | 10 | 3/2 | 0.073 | 794 | 127 | 413 | 84.01 | 47.98 |
| 5 | 15 | 3/2 | 0.596 | 998 | 120 | 485 | 87.98 | 51.40 |
| 6 | 20 | 3/2 | 8 | 1451 | 159 | 626 | 89.04 | 56.86 |
| 7 | 25 | 3/2 | 46 | 1808 | 190 | 787 | 89.49 | 56.47 |
| 8 | 25 | 3/3 | 59 | 1793 | 183 | 756 | 89.79 | 57.84 |
| 9 | 25 | 5/3 | 5 | 1479 | 310 | 455 | 79.04 | 69.24 |
| 10 | 30 | 5/3 | 11 | 1809 | 263 | 570 | 85.46 | 68.49 |
| 11 | 40 | 6/4 | 110 | 2002 | 309 | 235 | 84.57 | 88.26 |
| 12 | 50 | 6/4 | 711 | 2261 | 358 | 262 | 84.84 | 88.90 |
| 13 | 60 | 6/4 | 1324 | 2822 | 409 | 325 | 85.51 | 88.48 |
| 14 | 70 | 6/4 | --- | --- | --- | --- | --- | --- |
| Instances | Number of Containers | AGV/YC | Optimum Solution | |||
|---|---|---|---|---|---|---|
| Computational Time (s) | Completion Time (s) | AGV Utilization (%) | QC Utilization (%) | |||
| 1 | 5 | 2/2 | 0.009 | 553 | 84.45 | 35.99 |
| 2 | 6 | 2/2 | 0.02 | 620 | 88.39 | 33.71 |
| 3 | 10 | 2/2 | 0.191 | 1079 | 90.82 | 41.89 |
| 4 | 10 | 3/2 | 0.05 | 808 | 80.82 | 48.39 |
| 5 | 15 | 3/2 | 0.563 | 1052 | 86.69 | 53.23 |
| 6 | 20 | 3/2 | 6.513 | 1483 | 88.00 | 58.26 |
| 7 | 25 | 3/2 | 30.999 | 1810 | 85.91 | 59.89 |
| 8 | 25 | 3/3 | 21.667 | 1842 | 89.03 | 60.26 |
| 9 | 25 | 5/3 | 2.5 | 1532 | 78.72 | 70.23 |
| 10 | 30 | 5/3 | 11.04 | 1833 | 82.54 | 69.50 |
| 11 | 40 | 6/4 | 94.535 | 2091 | 80.54 | 88.47 |
| 12 | 50 | 6/4 | 272.419 | 2374 | 80.88 | 89.51 |
| 13 | 60 | 6/4 | 1431.354 | 2971 | 80.88 | 88.59 |
| Instances | Number of Containers | AGV/YC | Optimum Solution | |||
|---|---|---|---|---|---|---|
| Computational Time (s) | Completion Time (s) | AGV Utilization (%) | QC Utilization (%) | |||
| 1 | 5 | 2/2 | 0.009 | 543.00 | 80.48 | 39.96 |
| 2 | 6 | 2/2 | 0.025 | 651 | 84.79 | 42.55 |
| 3 | 10 | 2/2 | 2 | 1045 | 85.36 | 43.44 |
| 4 | 10 | 3/2 | 0.074 | 845 | 75.98 | 54.08 |
| 5 | 15 | 3/2 | 0.646 | 1066 | 82.55 | 60.88 |
| 6 | 20 | 3/2 | 13 | 1565 | 83.39 | 61.47 |
| 7 | 25 | 3/2 | 70 | 1817 | 82.61 | 63.29 |
| 8 | 25 | 3/3 | 66 | 1889 | 84.33 | 65.64 |
| 9 | 25 | 5/3 | 3 | 1541 | 75.60 | 85.01 |
| 10 | 30 | 5/3 | 13 | 1843 | 81.88 | 81.71 |
| 11 | 40 | 6/4 | 82 | 2210 | 76.02 | 90.41 |
| 12 | 50 | 6/4 | 236 | 2728 | 76.83 | 89.96 |
| 13 | 60 | 6/4 | 449 | 3259 | 77.29 | 89.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naeem, D.; Eltawil, A.; Iijima, J.; Gheith, M. Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals. Logistics 2022, 6, 82. https://0-doi-org.brum.beds.ac.uk/10.3390/logistics6040082
Naeem D, Eltawil A, Iijima J, Gheith M. Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals. Logistics. 2022; 6(4):82. https://0-doi-org.brum.beds.ac.uk/10.3390/logistics6040082
Chicago/Turabian StyleNaeem, Doaa, Amr Eltawil, Junichi Iijima, and Mohamed Gheith. 2022. "Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals" Logistics 6, no. 4: 82. https://0-doi-org.brum.beds.ac.uk/10.3390/logistics6040082