
FastFix Albatross Data: Snapshots of Raw GPS L-1 Data from Southern Royal Albatross


Department of Physics, University of Otago, P.O. Box 56 Dunedin, New Zealand
*
Author to whom correspondence should be addressed.
Data 2021, 6(4), 37; https://0-doi-org.brum.beds.ac.uk/10.3390/data6040037
Submission received: 16 March 2021
/
Revised: 1 April 2021
/
Accepted: 1 April 2021
/
Published: 7 April 2021
Abstract
:This dataset contains 4-millisecond snapshots of the GPS radio spectrum stored by wildlife tracking tags deployed on adult Southern Royal Albatross (Diomedea epomophora) in New Zealand. Approximately 60,000 snapshots were recovered from nine birds over two southern-hemisphere summers in 2012 and 2013. The data can be post-processed using snapshot positioning algorithms, and are made available as a test dataset for further development of these algorithms. Included are post-processed position estimates for reference, as well as test data from stationary tags positioned under various test conditions for the purposes of characterizing tag performance.
Data Set: doi:10.5281/zenodo.4266994
Data Set License: CC BY-SA 4.0
1. Summary
Recent developments in Global Navigation Satellite System (GNSS) positioning have led to a family of algorithms that require only millisecond samples of data, with the satellite ephemeris being provided externally. These algorithms are referred to as coarse-time, time-free, or snapshot positioning algorithms, and were first suggested in 1995 [1] and refined in 2009 [2] to show that positioning was possible using only code-phase measurements. These early algorithms required an initial estimate of positions accurate to 100 km to refine the position. In 2009, these algorithms were extended in a provisional patent application [3] that described the use of Doppler information and relative code-phase to provide a position estimate without an approximate initial position estimate—this work was published in 2020 [4]. Further work was carried out in 2012 by Othieno and Gleason [5] who also combined Doppler and code-phase measurements.
These algorithms enable a new kind of wildlife tracking tag [6] that operates by waking from a low-power state, capturing the GPS L-1 data, storing the data with an estimate of the time, and then returning to a low-power state. All further processing is done after the tag is recovered. This approach reduces the power consumption for a position estimate from cold-start by a factor of approximately 10,000 [4].
Two kinds of data are presented. The first dataset is stationary data that were intended for performance evaluation of the FastFix algorithm—demonstrating that a positioning accuracy of m was possible from short 4-millisecond snapshots [4]. The second dataset was gathered from devices attached to nesting Royal Albatross. These data were gathered to demonstrate a practical use of snapshot positioning, as well as to further understand how these animals interact with fishing vessels [7] during their feeding flights (typically of 1–2 weeks’ duration) and to shed light on what resources these animals might be using for feeding.
2. Data Description
This dataset consists of snapshots of the GPS L-1 band (1575.42 MHz) raw sampled data. These data were captured by wildlife tracking tags deployed on southern Royal Albatross (Diomedea epomophora), at a colony at Tairoa Heads near Dunedin, New Zealand. Nine tags were recovered, and from these tags, 59,868 snapshots were stored that showed valid GPS satellite data1. Information about the successfully recovered tags with valid data is shown in Table 1.
2.1. Directory Structure
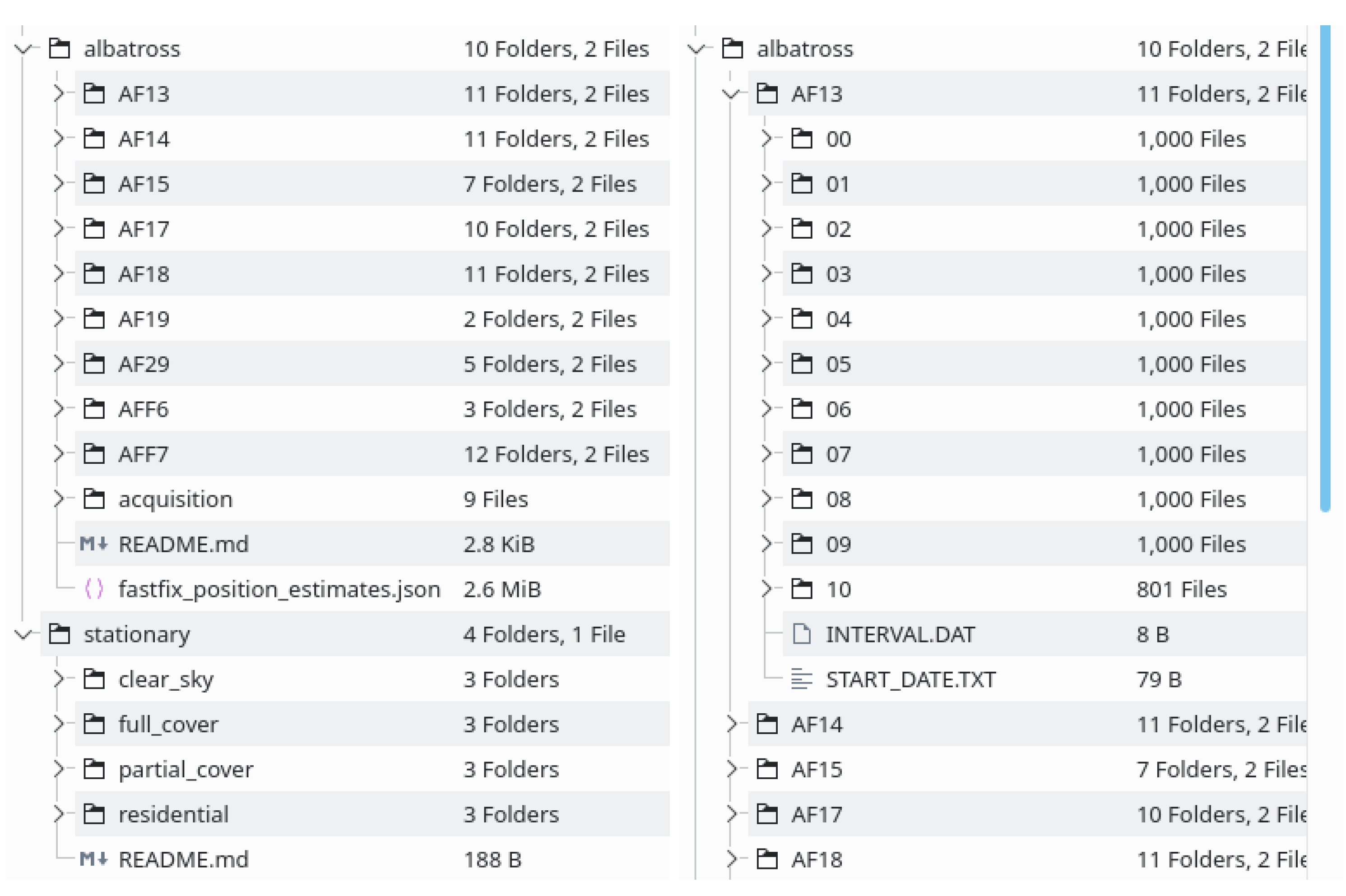
The directory structure of the dataset is broken into two main parts. The first is the albatross dataset, and the second is some stationary data from known locations for testing algorithms. The directory structure, shown in Figure 1, reflects this.
2.2. Tag Data Directory Structure
Each tag’s data are located in a directory, such as AF13, where the directory name identifies the tag. In it is a file START_DATE.TXT that contains the starting date and time of the local clock in the tag. This is stored in ISO UTC format. Within each tag directory are one or more two-digit subdirectories that contain groups of 1000 snapshots. The structure is shown below.

2.3. Snapshot File Structure
Each snapshot is a file FIXXXXX.BIN that contains a header, followed by interleaved 1-bit I/Q data sampled at 8.184 MHz, mixed down to a frequency of 32,000 Hz. The header consists of six 32-bit binary integers, which are shown in Table 2. The power spectral density of a typical sample is shown in Figure 2.
A checksum is included to validate the data stored in the file. The binary data are treated as an array of 16-bit words, and every second, one of these are added as unsigned 16-bit integers to produce a checksum, that is,
uint32_t calculate_checksum(struct fix* f) {
uint32_t i;
uint32_t word_count = f->sample_bytes / 2;
uint32_t ret = 0;
for (i=0;i<word_count;i+=2) {
ret += f->buffer[i];
}
return ret.
}
2.4. Stationary Test Data
The stationary test dataset is contained in the stationary folder, and consists of four different sets of samples taken with the tracking device under different conditions. The parameters of these stationary test datasets are shown in Table 3.
2.5. Acquisition Data
In addition, a GPS satellite acquisition [4] has been performed that retrieves the code-phase and Doppler shift from each of these files (where one or more satellites are visible). These are stored in a JSON file for each tag in the directory "acquisition". The following is an example of an entry that has three visible satellites.

It is important to note that the center frequency of the baseband signal can differ slightly from device to device. Typically, there is an uncertainty of up to 500 Hz, and this may need to be taken into account when carrying out Doppler-based analyses.
3. Methods
These data were gathered using FastFix GPS devices [4], designed to capture short samples of the GPS L1 signal and store it on a microSD card. These data can be processed using various snapshot algorithms—in particular, the tags were designed to collect 4 millisecond snapshots, as this is sufficient for position estimation using the FastFix algorithm [4].
3.1. Tag Electronics
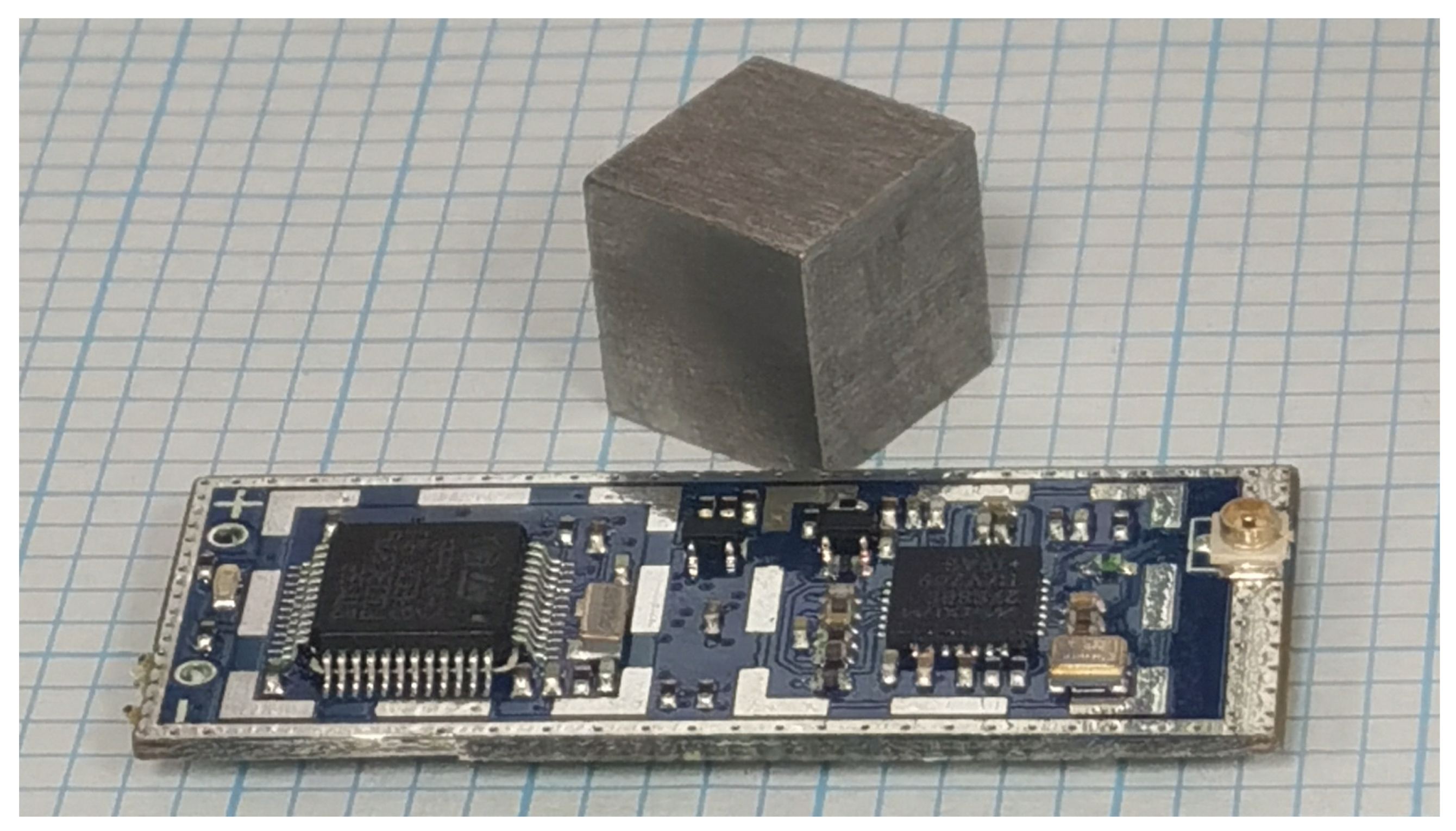
Tags were developed that use a Maxim MAX2769B Universal GPS Receiver RF front-end [8] to mix the GPS L1 signal at 1575.42 MHz down to an intermediate frequency of 4.092 MHz, and digitize the signal. The sampled data are transmitted over a high-speed serial interface to a low-power, 32-bit STM32F103CB [9] microcontroller. At fixed intervals, the system wakes from a low-power state, reads data from the GPS RF front-end, and stores this data in a file on a micro Secure Digital (microSD) Memory Card. A typical acquisition result from a single 4 ms stored sample is shown in Table 4. This shows that six satellite signals were visible in this data.
3.2. FastFix Position Estimates
Processed animal tracks are available in the file fastfix_position_estimates .json. This file contains JSON formatted arrays of 2D positions (without altitude, as all positions were essentially at sea-level since albatross seldom exceed altitudes of a few meters above wave height). These have been processed using the FastFix algorithm [4] to recover estimates of the animal’s position. These processed tracks are provided as a reference to compare improvements in algorithm performance. A map of the FastFix position estimates from the data in this repository are shown in Figure 4.
4. Discussion & Conclusions
This data is released into the public domain, in the hope that it will provide a useful test-bench for snapshot positioning algorithm development. There may be opportunities to further analyse this data in order to understand how these birds interact with features such as currents, continental shelves, and islands. as well as to perhaps explore a mechanism behind the remarkable feats of navigation shown by these amazing birds.
Author Contributions
Conceptualization, T.C.A.M.; methodology, T.C.A.M. and K.W.P.; Investigation; K.W.P.; software, T.C.A.M.; data curation, T.C.A.M.; writing–original draft preparation, T.C.A.M.; writing–review and editing, T.C.A.M.; visualization, T.C.A.M.; supervision, T.C.A.M.; funding acquisition, T.C.A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was partially funded by the New Zealand Ministry of Business, Innovation and Employment (MBIE; formerly FoRST). Grant Number: UOOX0904.
Institutional Review Board Statement
This study was authorized by the University of Otago animal ethics committee (AEC 71/11) and by the New Zealand Department of Conservation (OT-32054-RES).
Data Availability Statement
The data presented in this study are openly available in Zenodo at https://0-doi-org.brum.beds.ac.uk/10.5281/zenodo.4266994, reference number 4266994. The data are available under the CC BY-SA 4.0 license.
Acknowledgments
The authors would like to thank Phill Brown who assisted with the development of the FastFix wildlife tag electronics. They would also like to acknowledge Lyndon Perriman of the New Zealand Department of Conservation who attached and recovered the tags from the albatross, and Dr Juni Sugishita who assisted with the attachment.
Conflicts of Interest
The author declares no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript.
References
- Peterson, B.; Hartnett, R.; Ottman, G. GPS receiver structures for the urban canyon. In Proceedings of the 8th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995; pp. 1323–1332. [Google Scholar]
- Akopian, D.; Syrjarinne, J. A fast positioning method without navigation data decoding for assisted GPS receivers. IEEE Trans. Veh. Technol. 2009, 58, 4640–4645. [Google Scholar] [CrossRef]
- Molteno, T.C.A. An Apparatus and Method for Determining a Position of an Object. Provisional Patent Application No. WO2011046455A1, 21 April 2011. [Google Scholar]
- Molteno, T.C.A. Estimating Position from Millisecond Samples of GPS Signals (the “FastFix” Algorithm). Sensors 2020, 20, 6480. [Google Scholar] [CrossRef] [PubMed]
- Othieno, N.; Gleason, S. Combined Doppler and time free positioning technique for low dynamics receivers. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 60–65. [Google Scholar]
- Payne, K.W. Development of Two New GPS Avian Tracking Systems. Ph.D. Thesis, University of Otago, Dunedin, New Zealand, 2015. [Google Scholar]
- Sugishita, J. Provisioning and Foraging Strategies of Northern Royal Albatross (Diomedea Sanfordi) at Taiaroa Head/Pukekura, and Relationship with Fisheries. Ph.D. Thesis, University of Otago, Dunedin, New Zealand, 2016. [Google Scholar]
- Maxim Integrated Products. MAX2769B Universal GPS Receiver, rev 1st ed.; Maxim Integrated Products: Sunnyvale, CA, USA, 2011. [Google Scholar]
- ST Microelectronics NV. Medium-Density Performance line ARM®-Based 32-bit MCU with 64 or 128 KB Flash, USB, CAN, 7 Timers, 2 ADCs, 9 com. Interfaces, DocID13587 Rev 17 ed. 2015. Available online: www.st.com (accessed on 12 February 2021).
- Taoglas, Enniscorthy, Co. 12mm Two Stage 25dB GPS/GALILEO Active Patch Antenna Module with Front-End Saw Filter, spe-11-8-094/e/ss ed; Taoglas, Enniscorthy, Co.: Wexford, Ireland, 2009. [Google Scholar]
| 1 | Some tags stored data, but suspected antenna malfunctions meant no satellite data were present. These tags are not included in the dataset. |
Figure 1.
Directory Structure of the dataset.

Figure 2.
The power spectral density by Welch’s average periodogram method, of the L1-band sampled GPS data. The center frequency is 1575.42 MHz, which has been downsampled to an intermediate frequency (IF) of 32 kHz.
Figure 2.
The power spectral density by Welch’s average periodogram method, of the L1-band sampled GPS data. The center frequency is 1575.42 MHz, which has been downsampled to an intermediate frequency (IF) of 32 kHz.
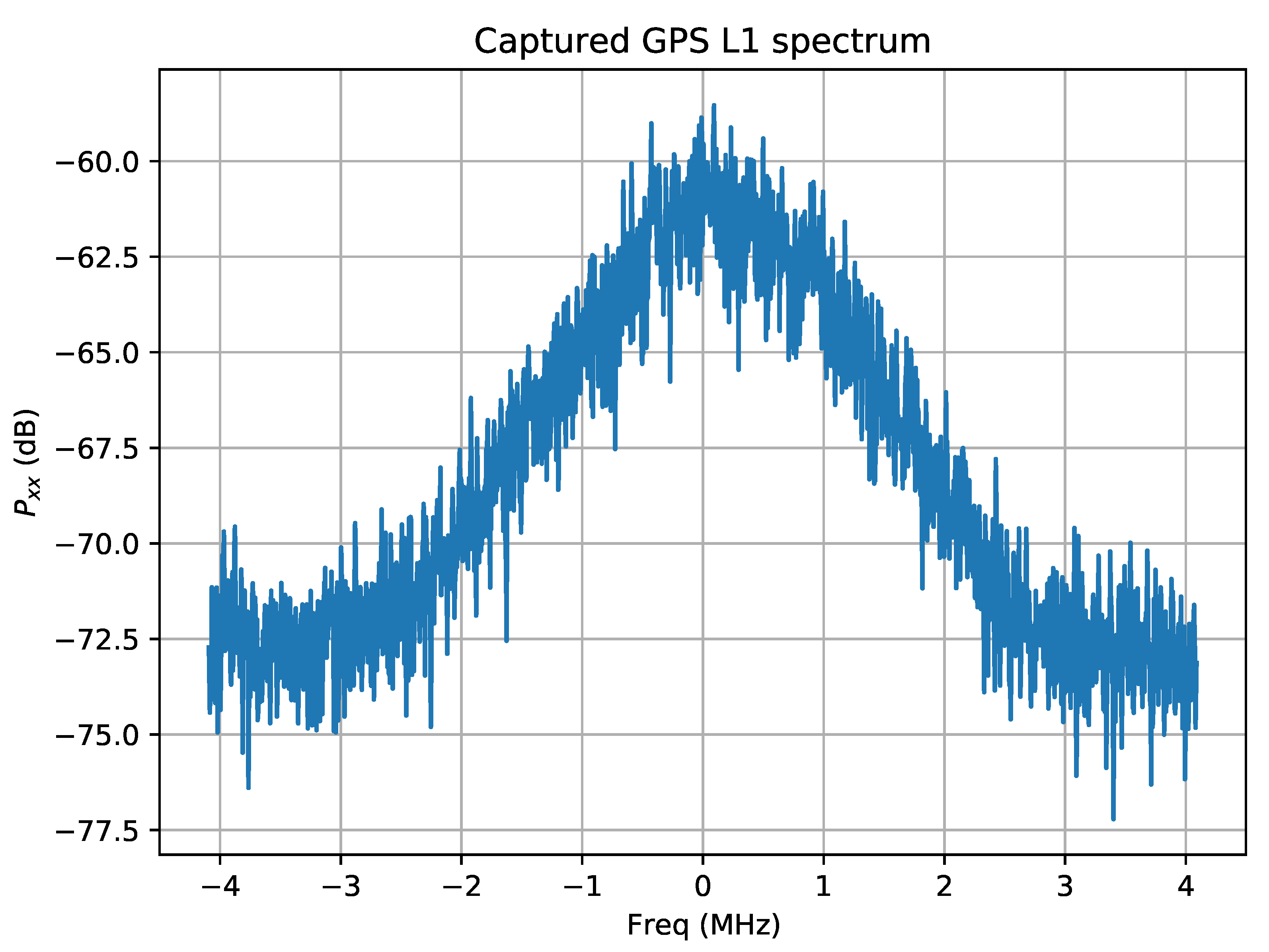
Figure 3.
FastFix tag electronics showing the microcontroller (on the left) and the GPS RF front-end radio on the right. The antenna connector is the small coaxial connector on the right. When fully assembled, the components are covered with RF shields. The microSD card is on the underside. The reference object is a 10 mm cube.
Figure 3.
FastFix tag electronics showing the microcontroller (on the left) and the GPS RF front-end radio on the right. The antenna connector is the small coaxial connector on the right. When fully assembled, the components are covered with RF shields. The microSD card is on the underside. The reference object is a 10 mm cube.

Figure 4.
Albatross tracks from this dataset, processed using the FastFix algorithm showing approximately 26,000 position estimates from the movement of Royal Albatross over the region of the ocean to the East of the South Island of New Zealand. The data were taken over the southern-hemisphere summer in 2012 and 2013.
Figure 4.
Albatross tracks from this dataset, processed using the FastFix algorithm showing approximately 26,000 position estimates from the movement of Royal Albatross over the region of the ocean to the East of the South Island of New Zealand. The data were taken over the southern-hemisphere summer in 2012 and 2013.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Details of the individual tags, showing the number of recovered snapshots, and the start time of the local clock on each tag.
Table 1.
Details of the individual tags, showing the number of recovered snapshots, and the start time of the local clock on each tag.
| Tag Name | Snapshot Count | Start Time (UTC) |
|---|---|---|
| AFF6 | 1888 | 2012-02-21T20:50:00 |
| AF13 | 10,801 | 2012-02-21T20:52:40 |
| AF14 | 11,054 | 2012-02-21T20:59:50 |
| AF15 | 6078 | 2012-02-22T03:17:30 |
| AF17 | 10,814 | 2012-02-29T22:01:30 |
| AF18 | 10,060 | 2012-02-29T22:07:15 |
| AF19 | 1701 | 2012-02-29T22:11:05 |
| AF29 | 4135 | 2013-01-10T19:45:53 |
| AF31 | 3337 | 2013-02-14T23:01:00 |
Table 2.
File structure for a snapshot binary data file recorded by a Fastfix tag.
| Bytes Address | Variable Name | Description |
|---|---|---|
| rtc_counter_value | Offset in seconds since the start time | |
| sample_count | Number of samples in this snapshot | |
| sample_bytes | Number of bytes in this snapshot | |
| sample_ms | Snapshot duration in milliseconds | |
| sampling_rate | Sampling rate | |
| checksum | A checksum for validating that data. | |
| data | Interleaved 1-bit I/Q binary baseband data. |
Table 3.
Details of the stationary test data sites.
| Scenario | Latitude | Longitude | Altitude (m) |
|---|---|---|---|
| roof_tests | −45.863912 | 170.51348452 | 46.5 |
| Clear Sky | −44.010808 | 170.489961 | 765 |
| Full Forest Cover | −44.006406 | 170.498767 | 768 |
| Partial Forest Cover | −44.005086 | 170.498037 | 766 |
| Residential | −44.010808 | 170.489125 | 770 |
Table 4.
Typical acquisition results for a 4 ms sample of signal (shown in Figure 2). There are six satellite signals that exceed the threshold set for signal detection in this data.
Table 4.
Typical acquisition results for a 4 ms sample of signal (shown in Figure 2). There are six satellite signals that exceed the threshold set for signal detection in this data.
| i | SV | Doppler-Sift | Code-Phase | |
|---|---|---|---|---|
| 1 | 16 | 30.01 | +2185.15461 | 0.503051794 |
| 2 | 23 | 21.08 | +1632.13669 | 0.576269412 |
| 3 | 32 | 16.84 | −2624.85478 | 0.209007485 |
| 4 | 13 | 14.03 | +2335.25122 | 0.197458456 |
| 5 | 20 | 13.56 | −818.94480 | 0.344973267 |
| 6 | 4 | 10.70 | −155.43040 | 0.439863498 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Molteno, T.C.A.; Payne, K.W. FastFix Albatross Data: Snapshots of Raw GPS L-1 Data from Southern Royal Albatross. Data 2021, 6, 37. https://0-doi-org.brum.beds.ac.uk/10.3390/data6040037
AMA Style
Molteno TCA, Payne KW. FastFix Albatross Data: Snapshots of Raw GPS L-1 Data from Southern Royal Albatross. Data. 2021; 6(4):37. https://0-doi-org.brum.beds.ac.uk/10.3390/data6040037
Chicago/Turabian StyleMolteno, Timothy C. A., and Keith W. Payne. 2021. "FastFix Albatross Data: Snapshots of Raw GPS L-1 Data from Southern Royal Albatross" Data 6, no. 4: 37. https://0-doi-org.brum.beds.ac.uk/10.3390/data6040037