
UAV4PE: An Open-Source Framework to Plan UAV Autonomous Missions for Planetary Exploration

 , ,
, ,  , and
, and
Abstract
:1. Introduction
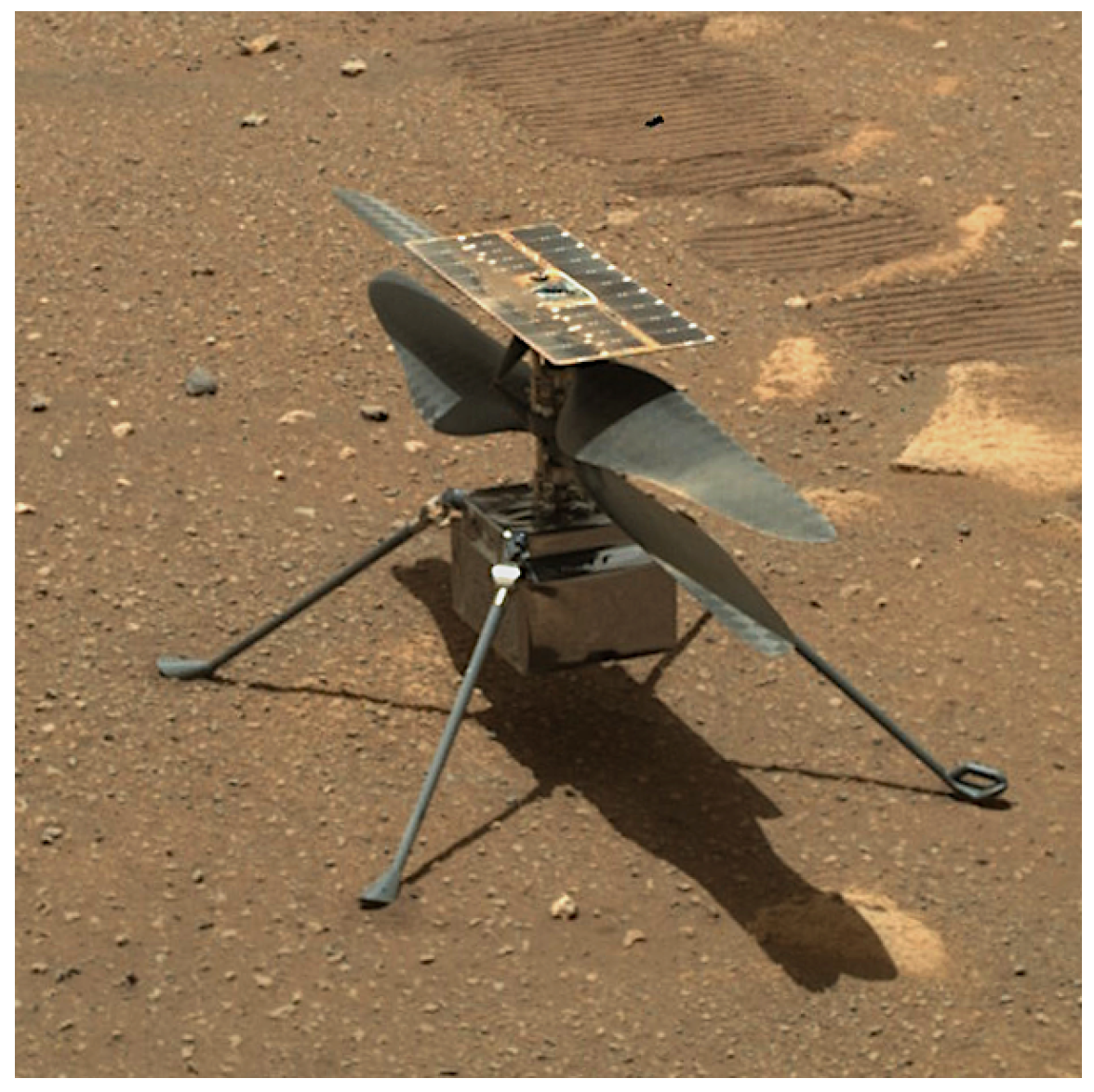
1.1. UAV Autonomous Mission Planning for Planetary Exploration
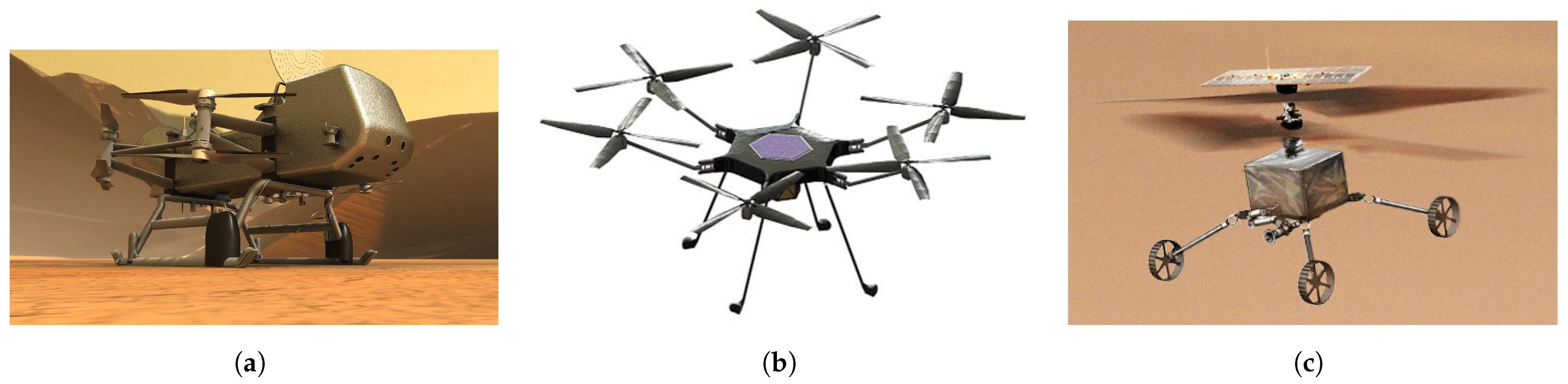
1.2. Frameworks for UAV Autonomous Planetary Exploration
2. Background
2.1. ROS
2.2. UAV Flight Stack
2.3. POMDPs and the POMDP.jl Library
3. Framework Implementation
3.1. UAV4PE_Mission_Planner
3.1.1. States (St)
3.1.2. Observations (O)
3.1.3. Actions (A)
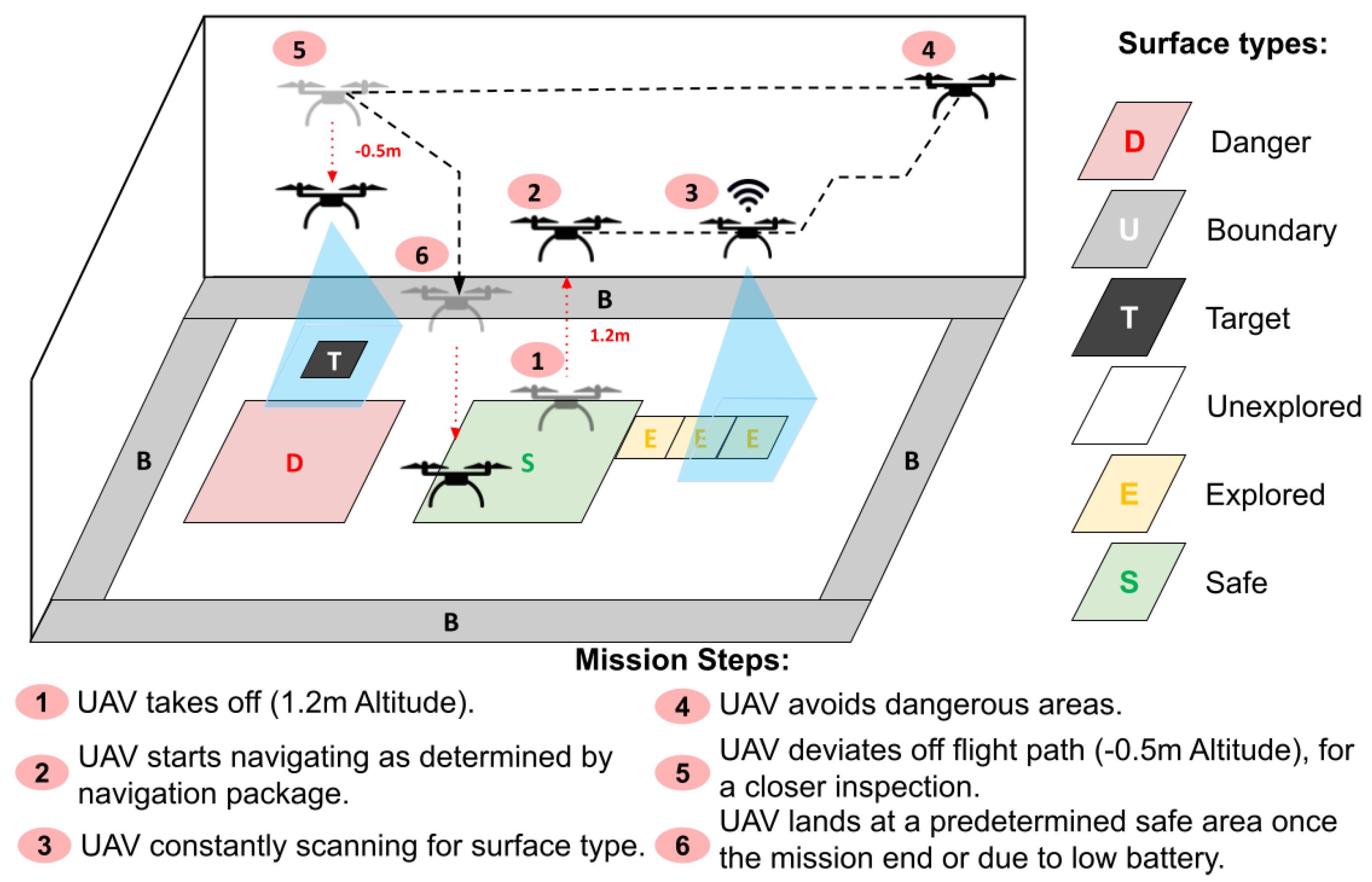
- Stay On the Ground : If this action is commanded from a different state to Landed, the navigation module performs a landing action. This action incorporates charging, processing, and idle tasks.
- Hover : It is a transition action between Take-off, Explore, Inspect and Landing actions. If commanded from the Landed state, a take-off action is attempted; otherwise, this action holds the position of the UAV.
- Horizontal search or Explore : The Explore action commands the UAV to explore, following which it will change its airborne horizontal position based on the navigation strategy, with a preference for unexplored regions. By performing this action, the UAV aims to explore the map cell by cell.
- Vertical descend or Inspect : The Inspect action commands the UAV to descend and collect surface data at a higher resolution.
- Land : This action is the last step to satisfy a successful flight and commands the UAV to navigate to the closest safe landing region and land there.
3.1.4. Transition Function (T)
3.1.5. Reward Function (R)
| Algorithm 1 Reward function R for each state during the UAV mission. | |
|
▹ UAV landed reward ▹ UAV landing reward ▹ UAV hovering reward ▹ UAV exploring reward ▹ UAV inspecting reward ▹ Default reward |
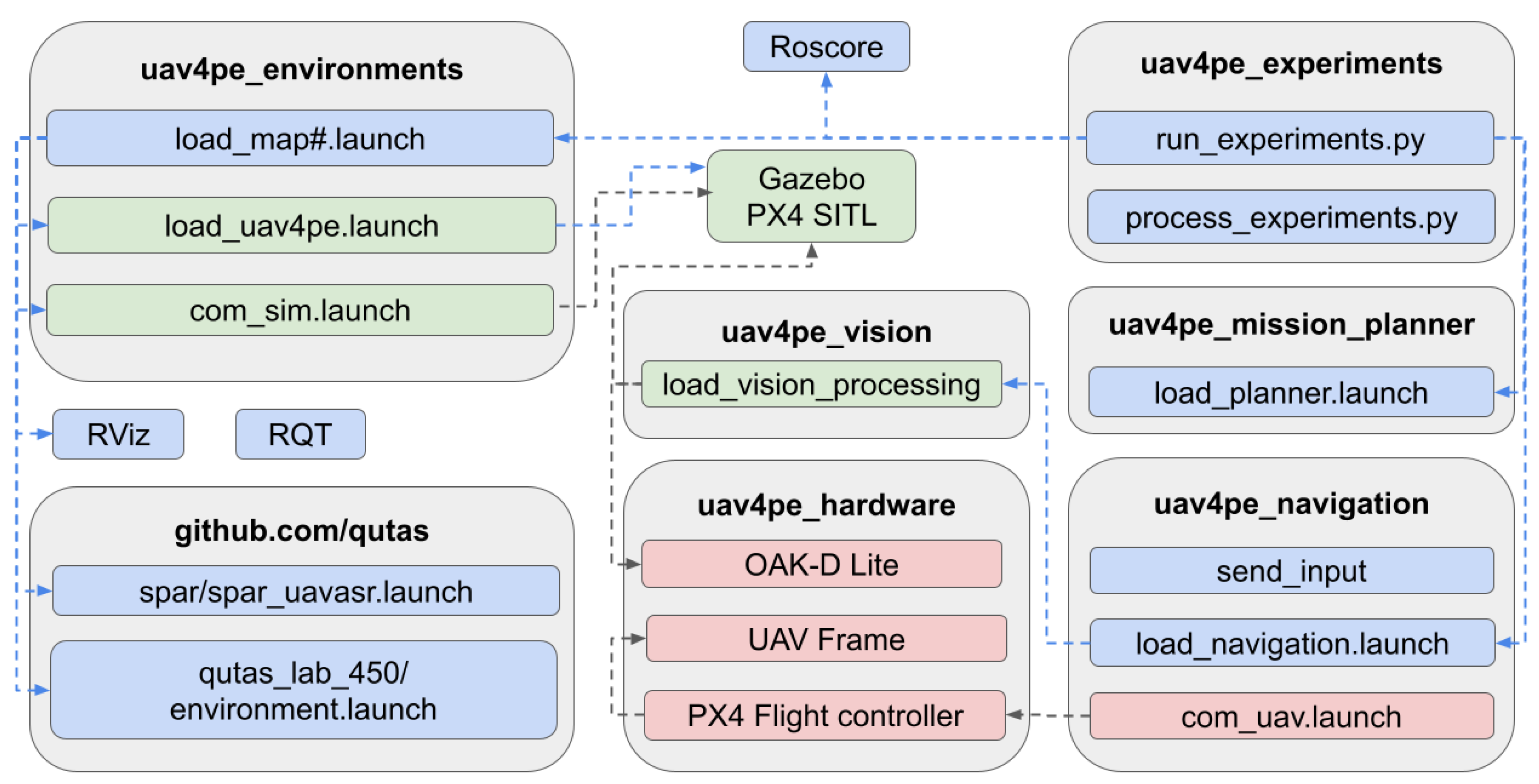
3.2. UAV4PE_Environments
3.3. Github.com/Qutas
3.4. UAV4PE_Navigation
3.5. UAV4PE_Vision
3.6. UAV4PE_Experiments
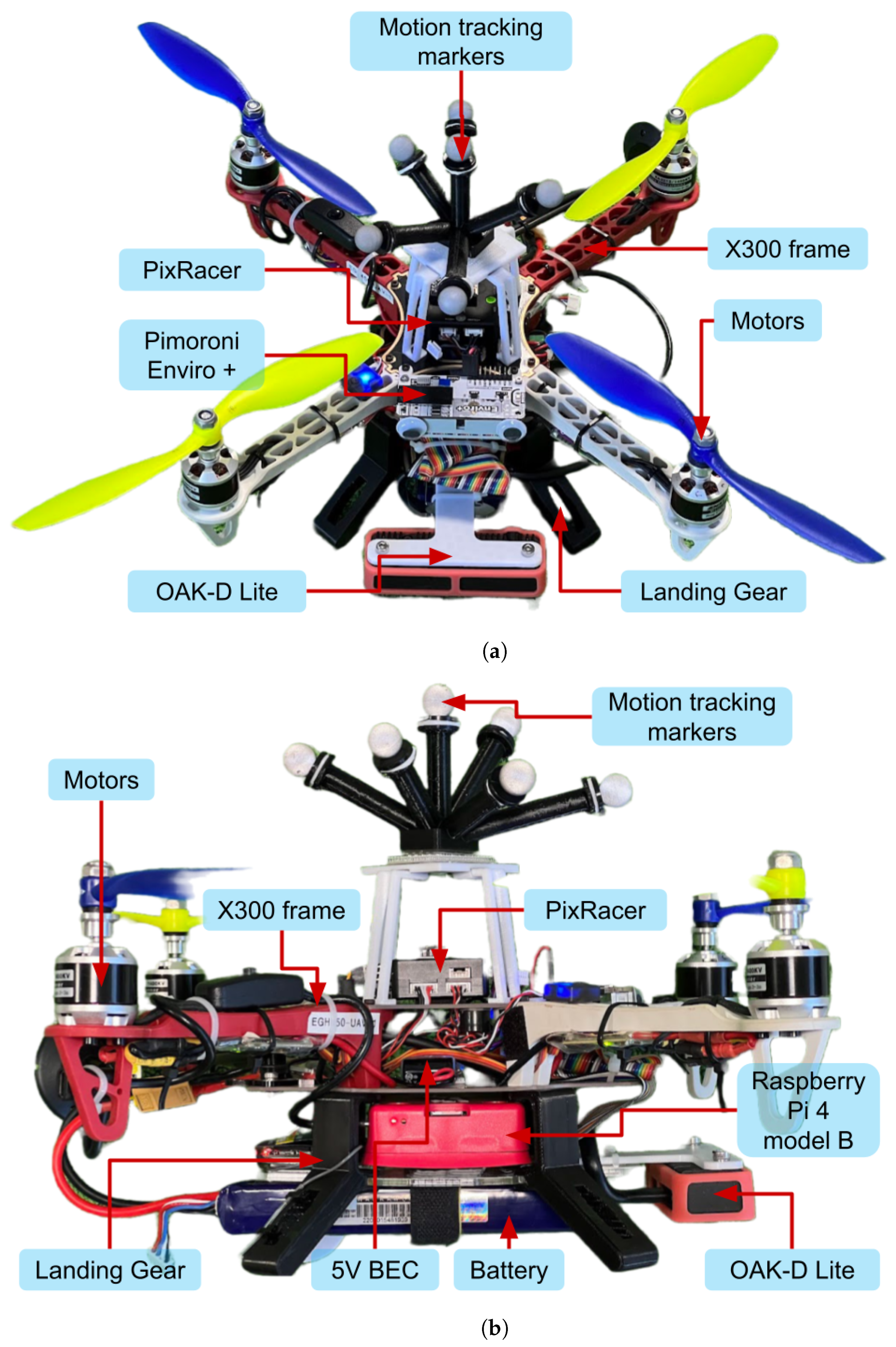
3.7. UAV4PE_Hardware
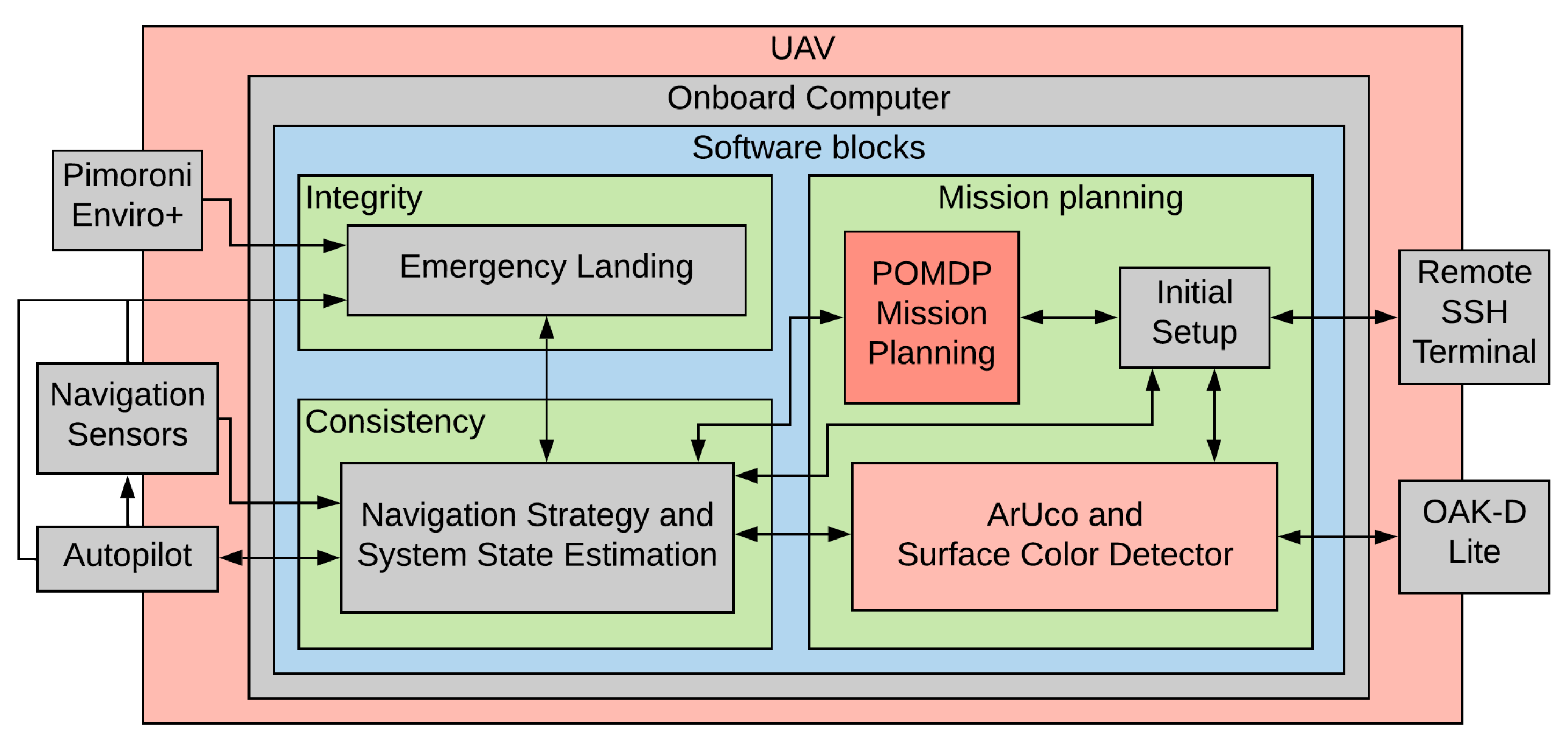
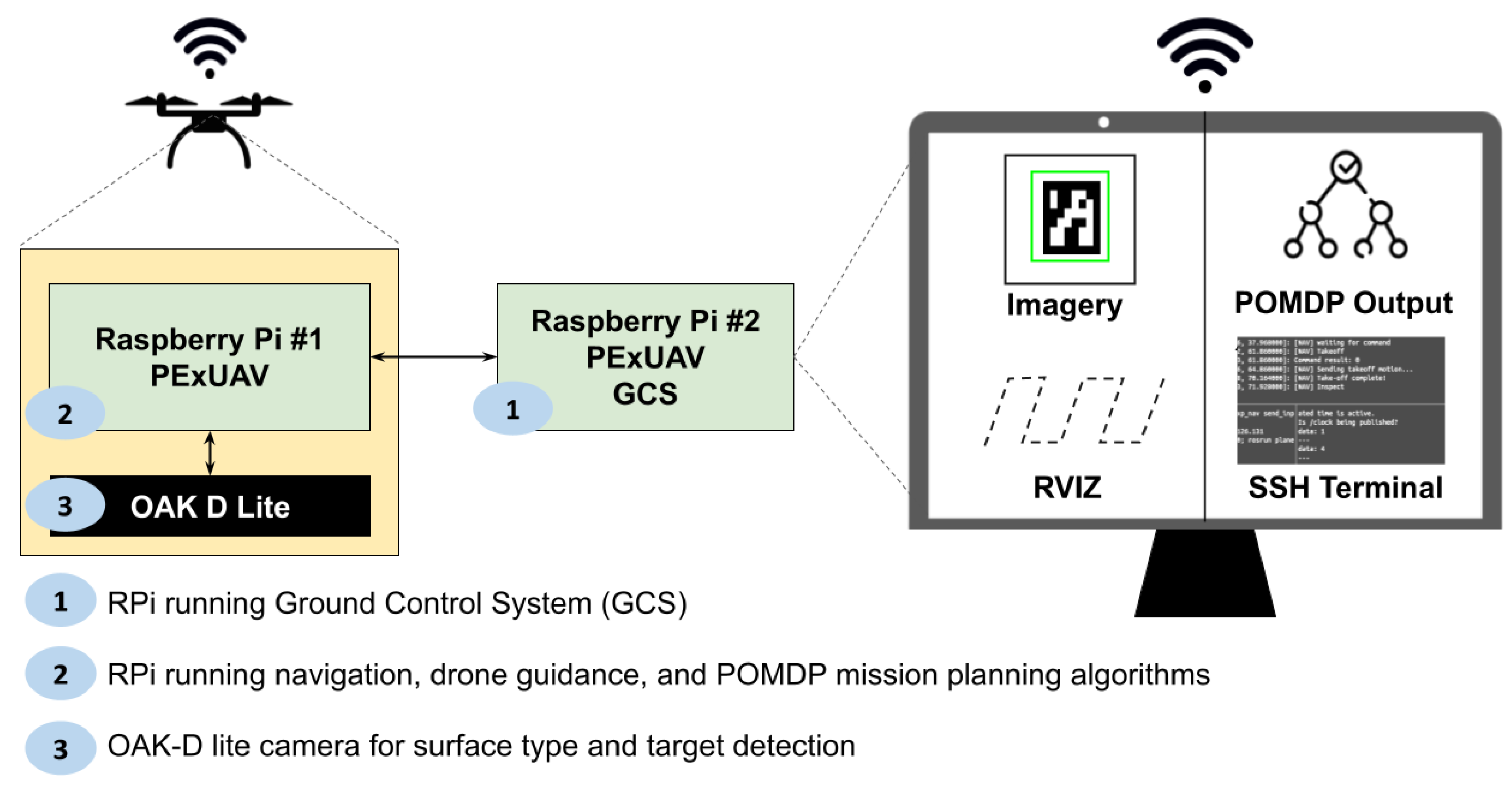
4. System Architecture
5. Experiments
5.1. Experimental Approaches
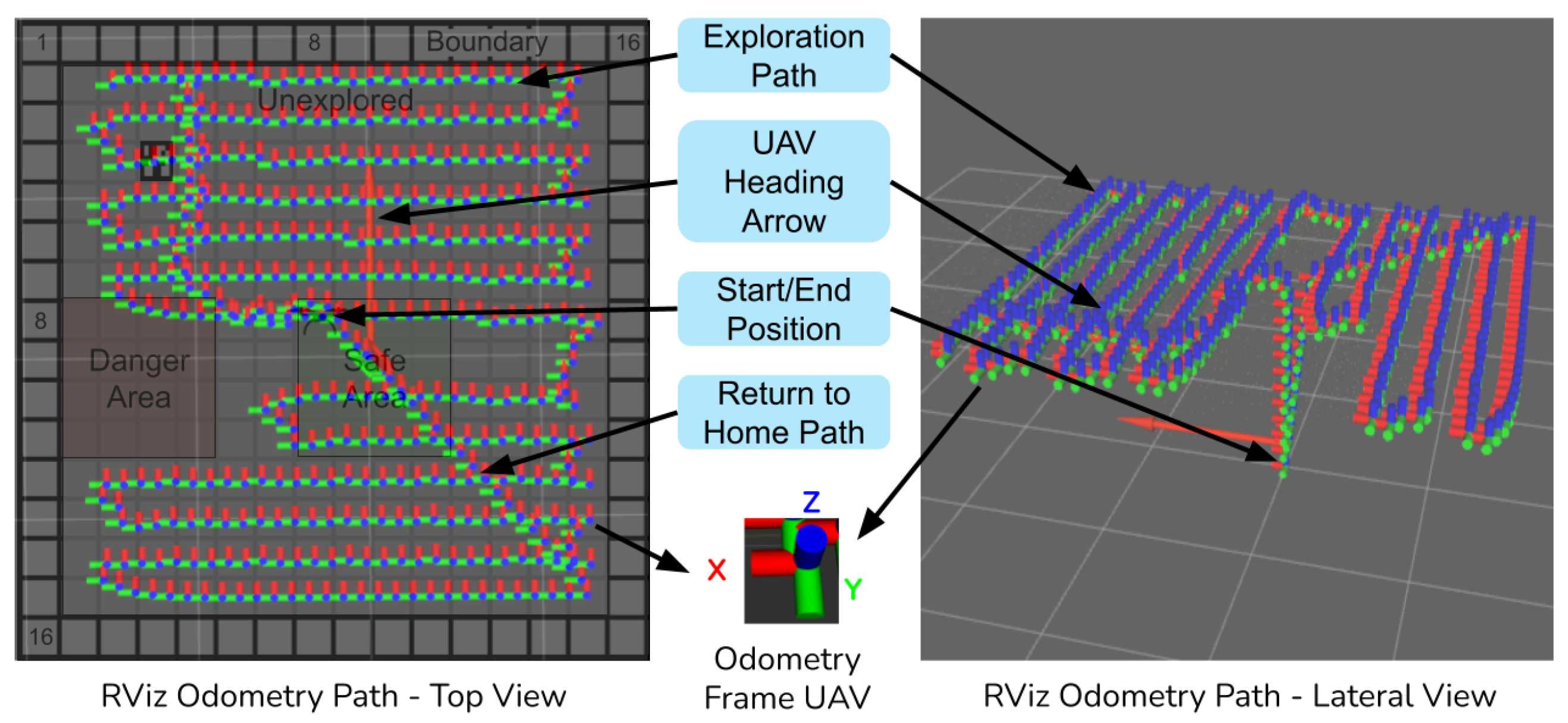
5.1.1. Simulation Environment
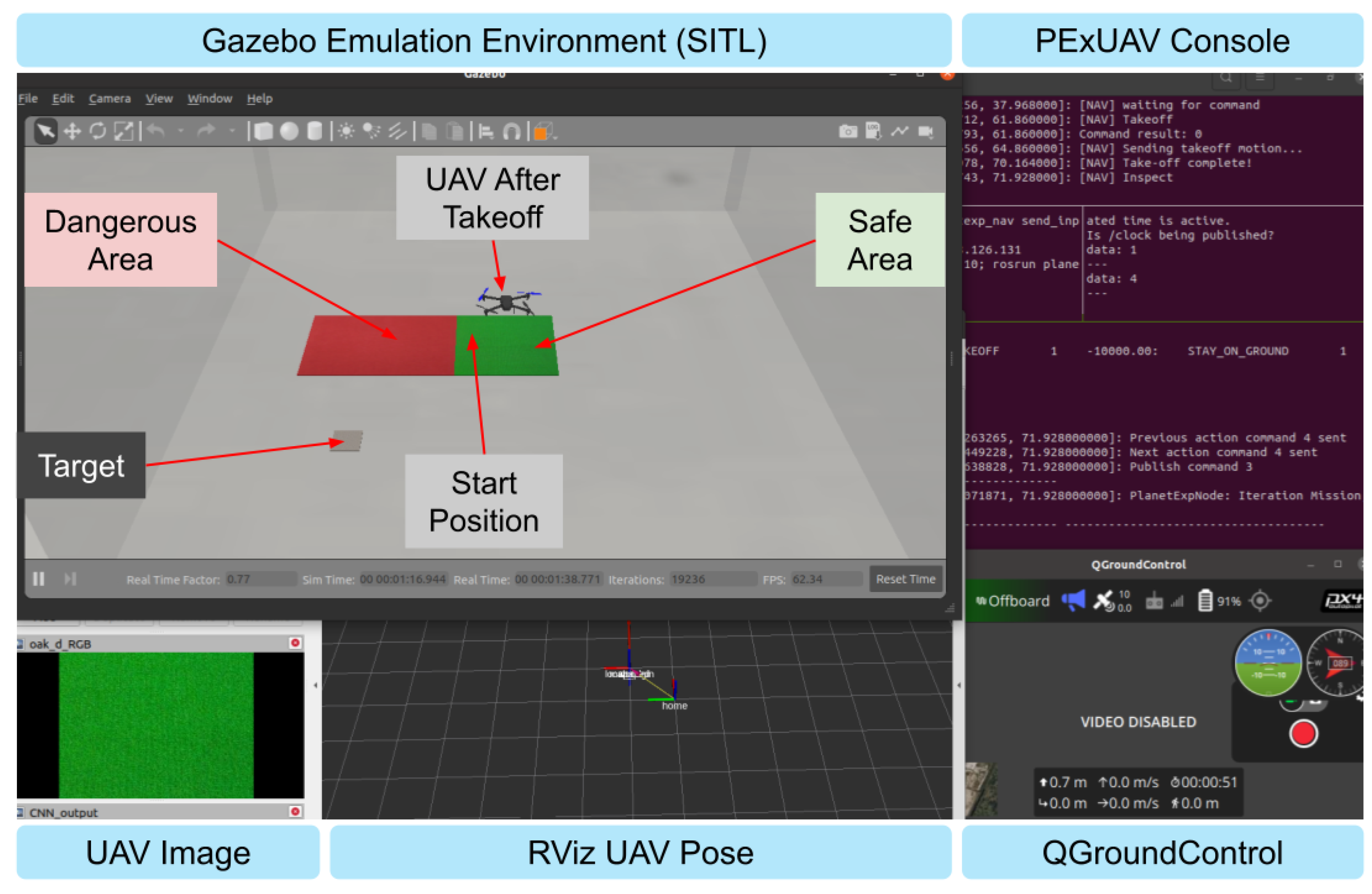
5.1.2. Emulated Environment
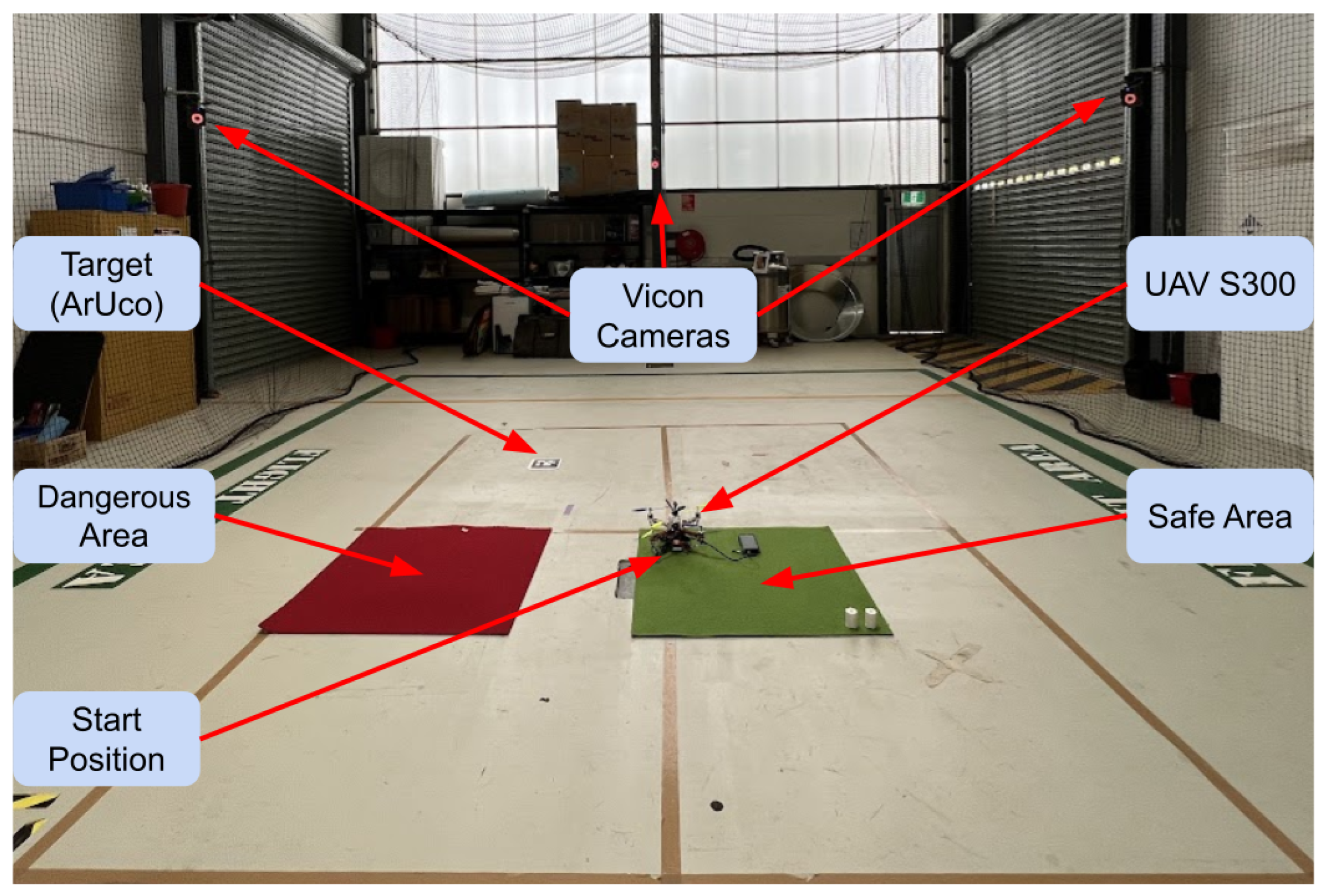
5.1.3. Real Environment
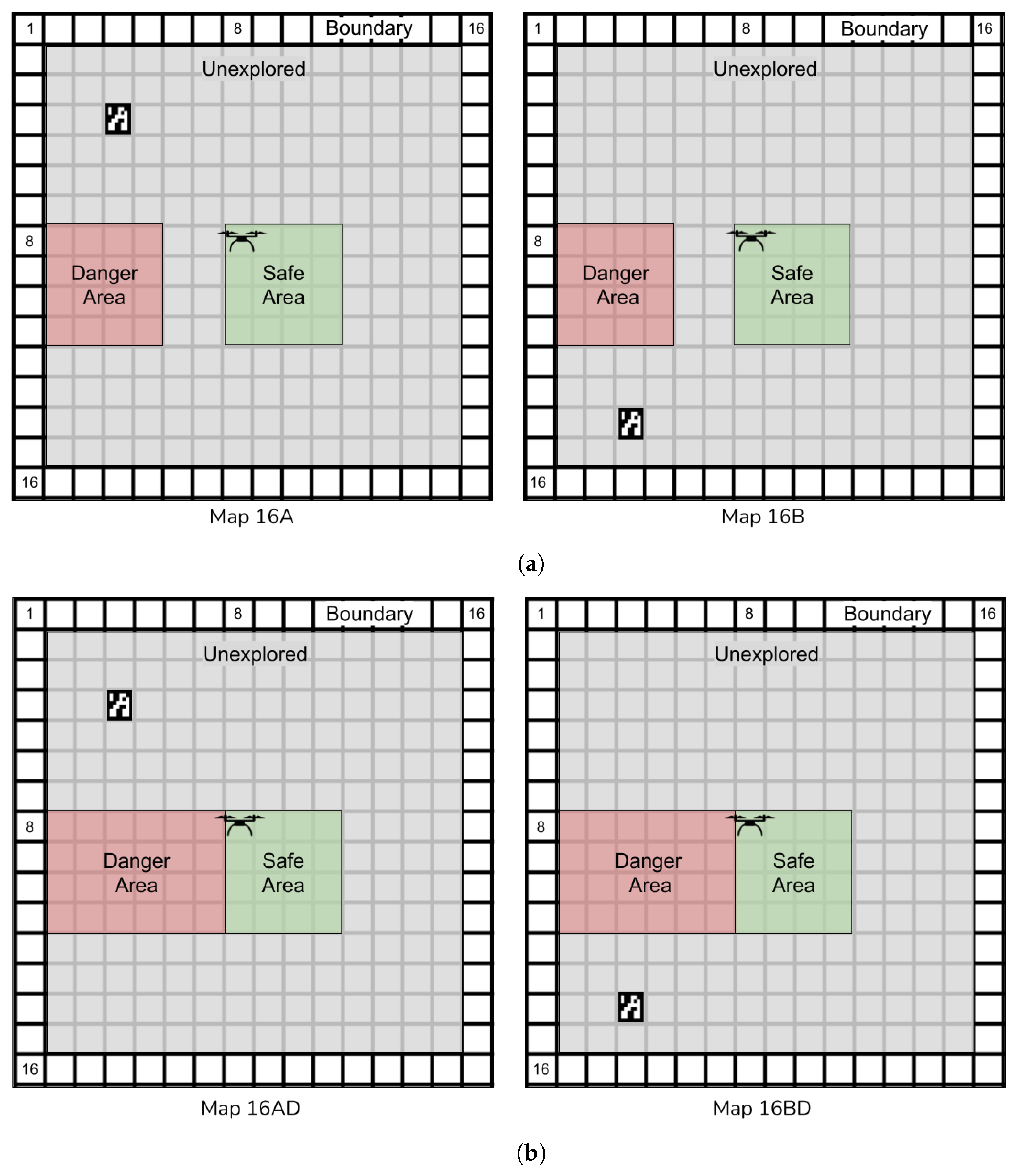
5.2. Experiments Setup
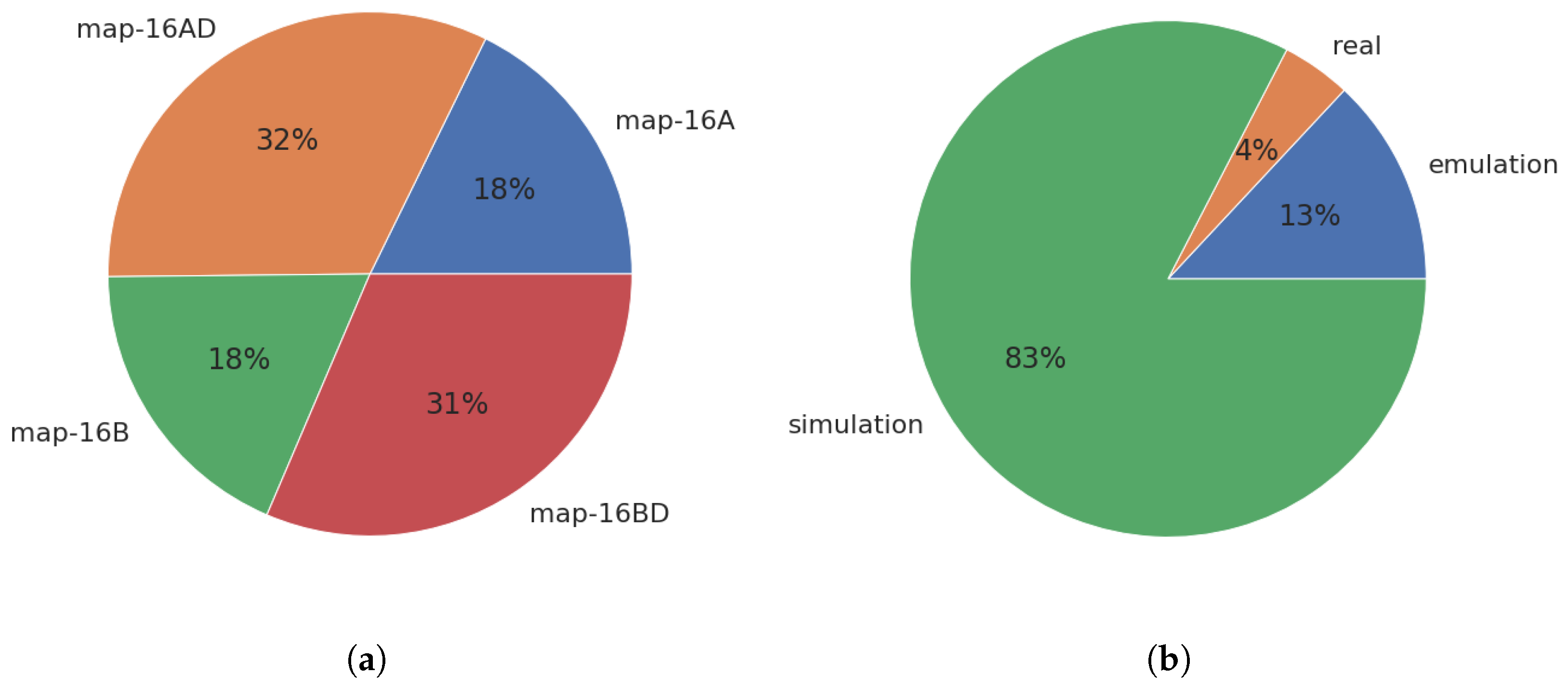
5.3. Data Extraction and Analysis
Data Filtering
6. Results
6.1. Successful Missions Analysis
7. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| POMDP | Partially Observable Markov Decision Process |
| ArUco | Augmented Reality University of Cordoba |
| ROS | Robot Operating System |
| GPS | Global Positioning System |
| NASA | National Aeronautics and Space Administration |
| I2C | Inter-Integrated Circuit |
| UART | Universal Asynchronous Receiver-Transmitter serial communication |
| SPI | Serial Peripheral Interface |
| PMW | Pulse Width Modulation |
| PPM | Pulse Position Modulation for radio control |
| MSO | Mars Science Orbiter |
| GCS | Ground Control System |
| SITL | Software In The Loop |
| CSV | Comma Separated Values |
| CPU | Central Processing Unit |
| DEM | Digital Elevation Model |
Appendix A. Additonal Experiments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Configuration Number (Conf_#) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Configuration Number | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 7.1 |
| Configuration used in: | S | S,E | S,E | S | S | S | S | S | S,E,R |
| maxRunTime (secs) | 720 | 360 | 360 | 360 | 360 | 360 | 360 | 360,600,720 | 360,600,720 |
| discountFactor | - | 0.9 | 0.99 | 0.9 | 0.99 | 0.9 | 0.99 | 0.99 | 0.9 |
| nSteps | - | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| maxDepthTree | - | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 |
| inspectingReward | - | 20 | 20 | 1 | 1 | 2 | 2 | 20 | 20 |
| exploringReward | - | 50 | 50 | 5 | 5 | 5 | 5 | 50 | 50 |
| landedReward | - | 1 | 1 | 0 | 0 | −2 | −2 | −10 | −10 |
| landingReward | - | −15 | −15 | −2 | −2 | −2 | −2 | −15 | −15 |
| hoveringReward | - | −10 | −10 | −2 | −2 | −2 | −2 | −10 | −10 |
| illegalMovePenalty | - | −2 | −2 | −2 | −2 | −2 | −2 | −2 | −2 |
| Parameters | Configuration Number (Conf_#) | ||||||
|---|---|---|---|---|---|---|---|
| Configuration Number | 7.2–7.9 | 8 | 8.1 | 9 | 10 | 11 | 12 |
| Configuration used in: | S | S,E,R | R | S | S | S | S |
| maxRunTime (secs) | 720 | 360,600 | 600 | 600 | 600 | 600 | 600 |
| discountFactor | (0.8–0.1) | 0.99 | 0.9 | 0.99 | 0.99 | 0.99 | 0.99 |
| nSteps | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| maxDepthTree | 20 | 20 | 20 | 20 | 20 | 20 | 20 |
| inspectingReward | 20 | 20 | 20 | 0 | 2 | 2 | 2 |
| exploringReward | 50 | 50 | 50 | 5 | 5 | 5 | 5 |
| landedReward | −10 | −10 | −10 | 0 | 1 | 1 | 1 |
| landingReward | −15 | −10 | −10 | 0 | 0 | 0 | −1 |
| hoveringReward | −10 | −10 | −10 | 0 | 0 | 0 | −1 |
| illegalMovePenalty | −2 | −2 | −2 | −100 | −10 | −50 | −50 |
| Count | Mean | Std | Min | 25% | 50% | 75% | Max | ||
|---|---|---|---|---|---|---|---|---|---|
| Conf | Type | ||||||||
| conf1 | emulation | 4.0 | 33.000000 | 0.816497 | 32.0 | 32.75 | 33.0 | 33.25 | 34.0 |
| conf8 | emulation | 2.0 | 35.000000 | 2.828427 | 33.0 | 34.00 | 35.0 | 36.00 | 37.0 |
| conf7.1 | real | 11.0 | 35.181818 | 6.539391 | 25.0 | 31.50 | 35.0 | 38.50 | 46.0 |
| conf2 | emulation | 1.0 | 36.000000 | NaN | 36.0 | 36.00 | 36.0 | 36.00 | 36.0 |
| conf8 | real | 2.0 | 42.000000 | 9.899495 | 35.0 | 38.50 | 42.0 | 45.50 | 49.0 |
| conf7.1 | emulation | 32.0 | 48.500000 | 9.705336 | 29.0 | 40.75 | 50.5 | 55.00 | 67.0 |
| conf8 | simulation | 10.0 | 55.400000 | 2.011080 | 51.0 | 54.25 | 56.0 | 56.75 | 58.0 |
| conf7.3 | simulation | 41.0 | 60.560976 | 7.252754 | 41.0 | 56.00 | 63.0 | 66.00 | 69.0 |
| conf7.6 | simulation | 28.0 | 60.571429 | 5.820962 | 42.0 | 57.75 | 61.0 | 64.25 | 69.0 |
| conf7.2 | simulation | 32.0 | 60.812500 | 6.981254 | 46.0 | 56.00 | 62.0 | 67.00 | 70.0 |
| conf7.5 | simulation | 37.0 | 61.081081 | 5.804110 | 52.0 | 55.00 | 62.0 | 66.00 | 71.0 |
| conf7.4 | simulation | 37.0 | 61.729730 | 4.793796 | 49.0 | 58.00 | 62.0 | 66.00 | 69.0 |
| conf7.1 | simulation | 20.0 | 62.900000 | 6.742637 | 47.0 | 57.50 | 65.5 | 67.50 | 71.0 |
| conf7.7 | simulation | 22.0 | 63.000000 | 4.850135 | 54.0 | 60.25 | 64.0 | 66.75 | 70.0 |
| conf7 | simulation | 2.0 | 64.500000 | 7.778175 | 59.0 | 61.75 | 64.5 | 67.25 | 70.0 |
| conf7.8 | simulation | 15.0 | 64.533333 | 5.617151 | 49.0 | 63.00 | 65.0 | 68.50 | 70.0 |
| conf7.9 | simulation | 3.0 | 67.666667 | 1.527525 | 66.0 | 67.00 | 68.0 | 68.50 | 69.0 |
References
- Toro, F.G.; Tsourdos, A. UAV Sensors for Environmental Monitoring; MDPI: Basel, Switzerland, 2018. [Google Scholar]
- Rojas, A.J.; Gonzalez, L.F.; Motta, N.; Villa, T.F. Design and flight testing of an integrated solar powered UAV and WSN for remote gas sensing. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; Mattingly, R., Ed.; IEEE: Piscataway, NJ, USA, 2015; Volume 2015, pp. 1–10. [Google Scholar]
- Al-Sabban, W.H.; Gonzalez, L.F.; Smith, R.N. Wind-energy based path planning for Unmanned Aerial Vehicles using Markov Decision Processes. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; Vincze, M., Ed.; IEEE: Piscataway, NJ, USA, 2013; pp. 784–789. [Google Scholar]
- Saffre, F.; Hildmann, H.; Karvonen, H.; Lind, T. Monitoring and Cordoning Wildfires with an Autonomous Swarm of Unmanned Aerial Vehicles. Drones 2022, 6, 301. [Google Scholar] [CrossRef]
- Serna, J.G.; Vanegas, F.; Gonzalez, F.; Flannery, D. A Review of Current Approaches for UAV Autonomous Mission Planning for Mars Biosignatures Detection. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. IEEE Aerospace Conference Proceedings. pp. 1–15. [Google Scholar]
- Ingenuity. Available online: https://www.jpl.nasa.gov/missions/ingenuity (accessed on 22 August 2022).
- Hassanalian, M.; Rice, D.; Abdelkefi, A. Evolution of space drones for planetary exploration: A review. Prog. Aerosp. Sci. 2018, 97, 61–105. [Google Scholar] [CrossRef]
- Balaram, B.; Canham, T.; Duncan, C.; Grip, H.F.; Johnson, W.; Maki, J.; Quon, A.; Stern, R.; Zhu, D. Mars helicopter technology demonstrator. In Proceedings of the 2018 AIAA Atmospheric Flight Mechanics Conference, Atlanta, Georgia, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018; pp. 1–18. [Google Scholar]
- Lorenz, R.D.; Turtle, E.P.; Barnes, J.W.; Trainer, M.G.; Adams, D.; Hibbard, K.E.; Sheldon, C.Z.; Zacny, K.; Peplowski, P.N.; Lawrence, D.J.; et al. Dragonfly: A rotorcraft lander concept for scientific exploration at Titan. Johns Hopkins APL Tech. Dig. 2018, 34, 374–387. [Google Scholar]
- Pipenberg, B.T.; Langberg, S.A.; Tyler, J.D.; Keennon, M.T. Conceptual Design of a Mars Rotorcraft for Future Sample Fetch Missions. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–14. [Google Scholar]
- Westall, F.; Cavalazzi, B. Biosignatures in Rocks. In Encyclopedia of Geobiology; Reitner, J., Thiel, V., Eds.; Springer: Dordrecht, The Netherlands, 2011; pp. 189–201. [Google Scholar]
- Galvez-Serna, J.; Mandel, N.; Sandino, J.; Vanegas, F.; Ly, N.; Flannery, D.T.; Gonzalez, F. Real-time Segmentation of Desiccation Cracks onboard UAVs for Planetary Exploration. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–12. [Google Scholar]
- Johnson, A.; Fox, K. NASA’s Ingenuity Mars Helicopter to Begin New Demonstration Phase; NASA: Washington, DC, USA, 2021. [Google Scholar]
- Johnson, A.; Fox, K. My Favorite Martian Image: Helicopter Sees Potential Rover Road Ahead–NASA’s Mars Exploration Program; NASA: Washington, DC, USA, 2021. [Google Scholar]
- Tzanetos, T.; Aung, M.; Balaram, J.; Grip, H.F.; Karras, J.T.; Canham, T.K.; Kubiak, G.; Anderson, J.; Merewether, G.; Starch, M.; et al. Ingenuity Mars Helicopter: From Technology Demonstration to Extraterrestrial Scout. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 01–19. [Google Scholar]
- Sasaki, T.; Otsu, K.; Thakker, R.; Haesaert, S.; Agha-mohammadi, A.A. Where to Map? Iterative Rover-Copter Path Planning for Mars Exploration. IEEE Robot. Autom. Lett. 2020, 5, 2123–2130. [Google Scholar] [CrossRef]
- Atyabi, A.; MahmoudZadeh, S.; Nefti-Meziani, S. Current advancements on autonomous mission planning and management systems: An AUV and UAV perspective. Annu. Rev. Control 2018, 46, 196–215. [Google Scholar] [CrossRef]
- Zermani, S.; Dezan, C.; Euler, R. Embedded decision making for UAV missions. In Proceedings of the 2017 6th Mediterranean Conference on Embedded Computing, MECO 2017–Including ECYPS 2017, Bar, MT, USA, 11–15 June 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017. [Google Scholar]
- Campo, L.V.; Ledezma, A.; Corrales, J.C. MCO Plan: Efficient Coverage Mission for Multiple Micro Aerial Vehicles Modeled as Agents. Drones 2022, 6, 181. [Google Scholar] [CrossRef]
- Vanegas, F.; Gaston, K.J.; Roberts, J.; Gonzalez, F. A Framework for UAV Navigation and Exploration in GPS-Denied Environments. In Proceedings of the IEEE Aerospace Conference Proceedings. IEEE Computer Society, Big Sky, MT, USA, 2–9 March 2019; Volume 2019. [Google Scholar]
- Allak, E.; Brommer, C.; Dallenbach, D.; Weiss, S. AMADEE-18: Vision-Based Unmanned Aerial Vehicle Navigation for Analog Mars Mission (AVI-NAV). Astrobiology 2020, 20, 1321–1337. [Google Scholar] [CrossRef] [PubMed]
- Sandino, J.; Vanegas, F.; Gonzalez, F.; Maire, F. Autonomous UAV Navigation for Active Perception of Targets in Uncertain and Cluttered Environments. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–12. [Google Scholar]
- Sandino, J.; Vanegas, F.; Maire, F.; Caccetta, P.; Sanderson, C.; Gonzalez, F. UAV framework for autonomous onboard navigation and people/object detection in cluttered indoor environments. Remote Sens. 2020, 12, 3386. [Google Scholar] [CrossRef]
- Galvez-Serna, J.; Vanegas, F.; Gonzalez, F.; Flannery, D. Towards a Probabilistic Based Autonomous UAV Mission Planning for Planetary Exploration. In Proceedings of the 2021 IEEE Aerospace Conference (50100), IEEE Computer Society, Big Sky, MT, USA, 6–13 March 2021; Volume 2021, pp. 1–8. [Google Scholar]
- Kim, S.K.; Salzman, O.; Likhachev, M. POMHDP: Search-Based Belief Space Planning Using Multiple Heuristics. ICAPS 2019, 29, 734–744. [Google Scholar] [CrossRef]
- Hireche, C.; Dezan, C.; Diguet, J.P.; Mejias, L. BFM: A Scalable and Resource-Aware Method for Adaptive Mission Planning of UAVs. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; Institute of Electrical and Electronics Engineers Inc.: New Jersey, USA, 2018; pp. 6702–6707. [Google Scholar]
- Kaelbling, L.P.; Littman, M.L.; Cassandra, A.R. Planning and acting in partially observable stochastic domains. Artif. Intell. 1998, 101, 99–134. [Google Scholar] [CrossRef] [Green Version]
- Vanegas, F.; Gonzalez, F. Enabling UAV Navigation with Sensor and Environmental Uncertainty in Cluttered and GPS-Denied Environments. Sensors 2016, 16, 666. [Google Scholar] [CrossRef] [PubMed]
- Hireche, C.; Dezan, C.; Mocanu, S.; Heller, D.; Diguet, J.P. Context/Resource-Aware Mission Planning Based on BNs and Concurrent MDPs for Autonomous UAVs. Sensors 2018, 18, 4266. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Silver, D.; Veness, J. Monte-Carlo Planning in Large POMDPs. In Advances in Neural Information Processing Systems; Lafferty, J., Williams, C., Shawe-Taylor, J., Zemel, R., Culotta, A., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2010; Volume 23. [Google Scholar]
- Serna, J.G.; Gonzalez, F.; Alvarez, F.V.; Flannery, D. A Probabilistic based UAV Mission Planning and Navigation for Planetary Exploration. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems: ICUAS’20, Athens, Greece, 1–4 September 2020; pp. 594–599. [Google Scholar]
- Walker, O.; Vanegas, F.; Gonzalez, F. A Framework for Multi-Agent UAV Exploration and Target-Finding in GPS-Denied and Partially Observable Environments. Sensors 2020, 20, 4739. [Google Scholar] [CrossRef] [PubMed]
- Canham, T. The Mars Ingenuity Helicopter—A Victory for Open-Source Software. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–11. [Google Scholar]
- Egorov, M.; Sunberg, Z.N.; Balaban, E.; Wheeler, T.A.; Gupta, J.K.; Kochenderfer, M.J. POMDPs.jl: A Framework for Sequential Decision Making under Uncertainty. J. Mach. Learn. Res. 2017, 18, 1–5. [Google Scholar]
- Klimenko, D.; Song, J.; Kurniawati, H. TAPIR: A software Toolkit for approximating and adapting POMDP solutions online. In Proceedings of the Australasian Conference on Robotics and Automation, Melbourne, Australia, 2–4 December 2014; Volume 24. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Cambridge, UK, 2005; Volume 45, p. 668. [Google Scholar]



















| Observation Probability for State | |||||
|---|---|---|---|---|---|
| Action | Landed | Hovering | Exploring | Inspecting | Landing |
| Stay on ground | 0.9 | 0.03 | 0.01 | 0.01 | 0.05 |
| Hover | 0.05 | 0.9 | 0.01 | 0.01 | 0.03 |
| Explore | 0.01 | 0.05 | 0.9 | 0.01 | 0.03 |
| Inspect | 0.01 | 0.05 | 0.01 | 0.9 | 0.03 |
| Land | 0.05 | 0.03 | 0.01 | 0.01 | 0.9 |
| Transition probability to State | |||||
|---|---|---|---|---|---|
| Action | Landed | Hovering | Exploring | Inspecting | Landing |
| Stay on ground | 0.9 | 0.03 | 0.01 | 0.01 | 0.05 |
| Hover | 0.05 | 0.9 | 0.01 | 0.01 | 0.03 |
| Explore | 0.01 | 0.05 | 0.9 | 0.01 | 0.03 |
| Inspect | 0.01 | 0.05 | 0.01 | 0.9 | 0.03 |
| Land | 0.05 | 0.03 | 0.01 | 0.01 | 0.9 |
| # | Column | Non-Null Count | Dtype |
|---|---|---|---|
| 0 | type | 2123 non-null | object |
| 1 | conf | 2123 non-null | object |
| 2 | expFolder | 2123 non-null | object |
| 3 | map | 2123 non-null | object |
| 4 | expNumber | 2123 non-null | int64 |
| 5 | targetFound | 2123 non-null | int64 |
| 6 | exploredArea | 2123 non-null | float64 |
| 7 | takeoffsCount | 2123 non-null | int64 |
| 8 | actionsTotal | 2123 non-null | int64 |
| 9 | actionsCount | 2123 non-null | object |
| 10 | actionSequence | 2123 non-null | object |
| Index | Experiment Number | Target Found | Area Explored | Takeoffs Count | Actions Count |
|---|---|---|---|---|---|
| count | 2112.00 | 2112.00 | 2112.00 | 2112.00 | 2112.00 |
| mean | 4.89 | 0.63 | 66.45 | 5.29 | 49.29 |
| std | 3.45 | 0.48 | 25.69 | 3.61 | 14.43 |
| min | 0.00 | 0.00 | 1.22 | 0.00 | 8.00 |
| 25% | 2.00 | 0.00 | 46.15 | 2.00 | 35.00 |
| 50% | 5.00 | 1.00 | 61.56 | 4.00 | 53.00 |
| 75% | 8.00 | 1.00 | 96.34 | 8.00 | 59.00 |
| max | 11.00 | 1.00 | 100.00 | 18.00 | 71.00 |
| Map | Type | Experiment Number | Target Found | Area Explored | Takeoffs Count | Actions Count |
|---|---|---|---|---|---|---|
| map-16A | emulation | 4.63 | 0.84 | 66.65 | 2.92 | 37.14 |
| real | 0.9 | 1.0 | 82.68 | 5.0 | 42.0 | |
| simulation | 5.07 | 0.95 | 62.82 | 6.0 | 53.15 | |
| map-16AD | emulation | 4.61 | 0.89 | 69.68 | 2.55 | 35.9 |
| real | 0.7 | 1.0 | 86.8 | 5.3 | 44.3 | |
| simulation | 5.07 | 0.93 | 67.97 | 5.95 | 52.11 | |
| map-16B | emulation | 4.63 | 0.31 | 67.12 | 2.48 | 36.75 |
| real | 0.8 | 0.5 | 83.78 | 5.2 | 42.9 | |
| simulation | 5.07 | 0.28 | 62.93 | 6.03 | 53.23 | |
| map-16BD | emulation | 4.59 | 0.35 | 70.77 | 2.37 | 35.35 |
| real | 1.14 | 0.71 | 85.62 | 4.93 | 40.86 | |
| simulation | 5.06 | 0.39 | 68.15 | 5.89 | 52.222 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galvez-Serna, J.; Vanegas, F.; Brar, S.; Sandino, J.; Flannery, D.; Gonzalez, F. UAV4PE: An Open-Source Framework to Plan UAV Autonomous Missions for Planetary Exploration. Drones 2022, 6, 391. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6120391
Galvez-Serna J, Vanegas F, Brar S, Sandino J, Flannery D, Gonzalez F. UAV4PE: An Open-Source Framework to Plan UAV Autonomous Missions for Planetary Exploration. Drones. 2022; 6(12):391. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6120391
Chicago/Turabian StyleGalvez-Serna, Julian, Fernando Vanegas, Shahzad Brar, Juan Sandino, David Flannery, and Felipe Gonzalez. 2022. "UAV4PE: An Open-Source Framework to Plan UAV Autonomous Missions for Planetary Exploration" Drones 6, no. 12: 391. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6120391