
Global Navigation Satellite Systems Signal Vulnerabilities in Unmanned Aerial Vehicle Operations: Impact of Affordable Software-Defined Radio


Abstract
:1. Introduction
2. Materials and Methods
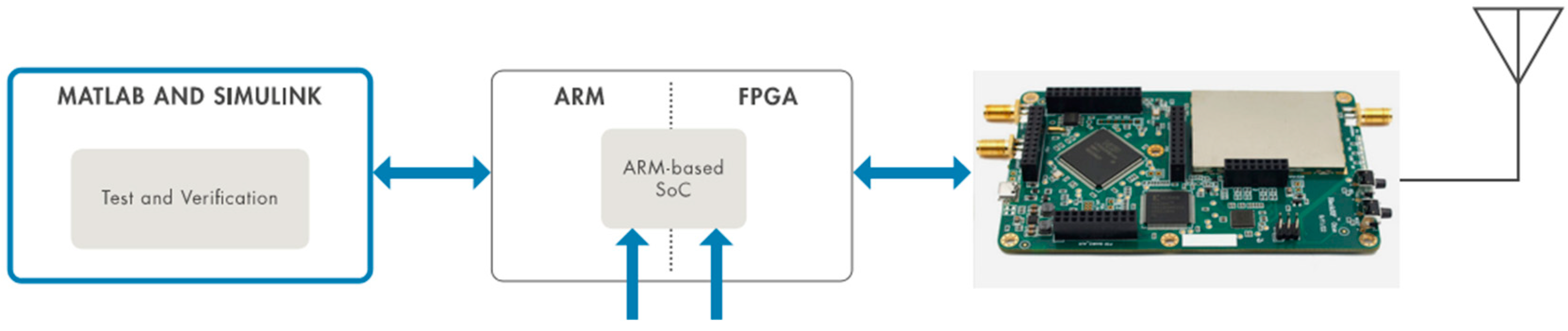
- Device configuration: the HackRF One was equipped with an external TCXO to enhance precision and performance.
- Signal generation: A GPS satellite constellation was specified through a GPS broadcast ephemeris file obtained from NASA. This file was processed to create a binary file for signal distribution using the “gps-sdr-sim” software Hack RF One.
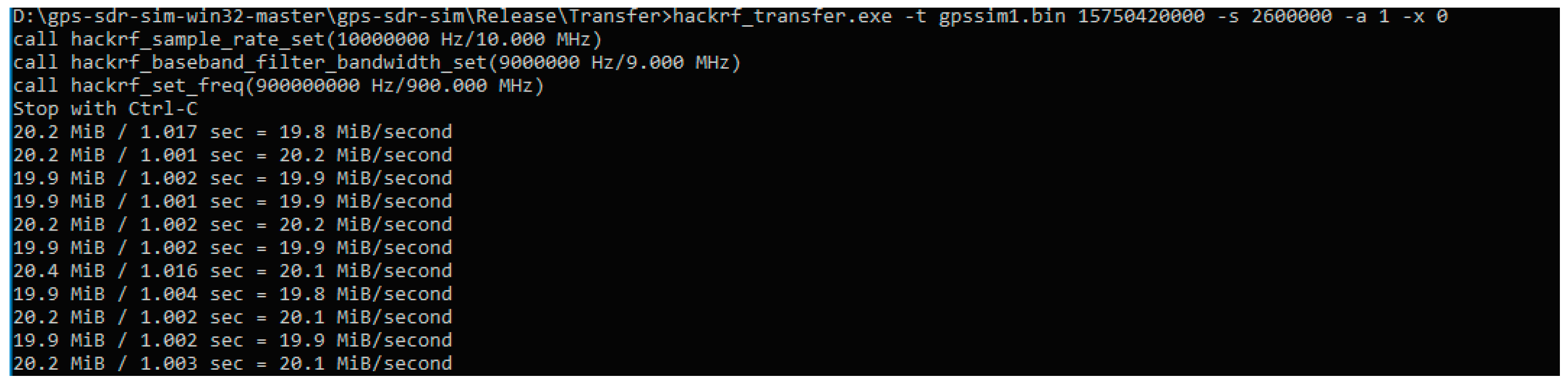
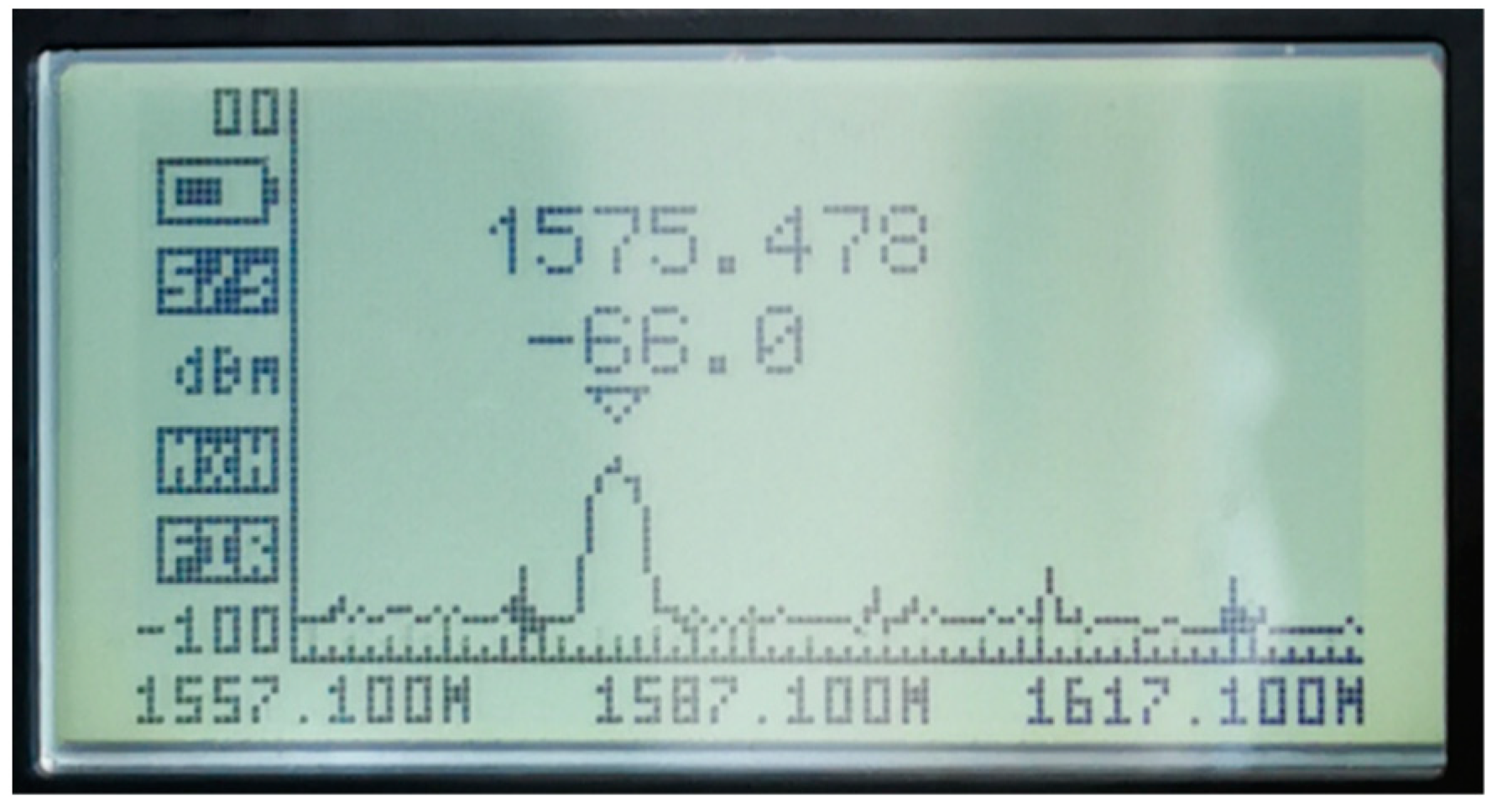
- Signal transmission: The generated GPS signal was transmitted using the HackRF One at a specified frequency. The transmission process was observed and verified using a spectrum analyzer.
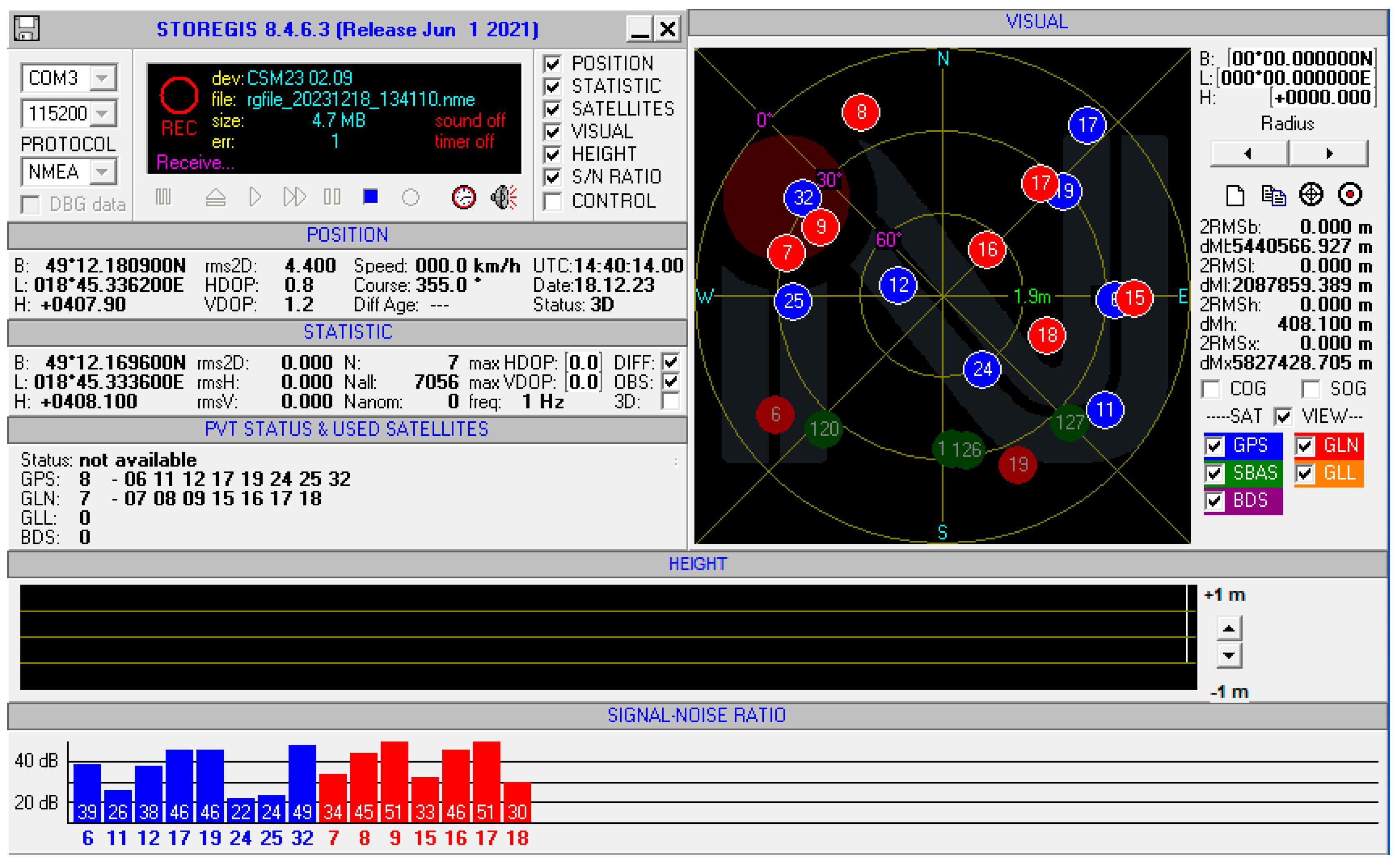
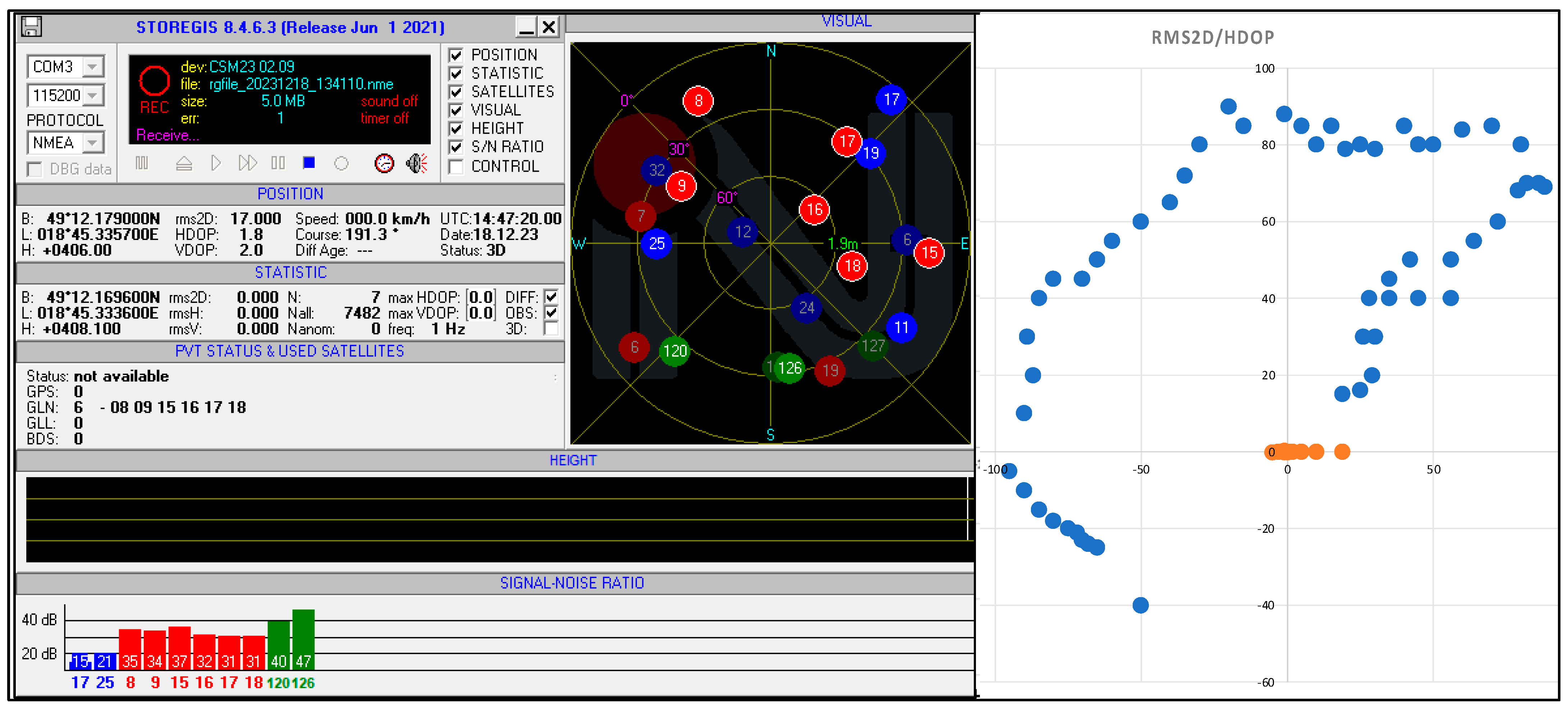
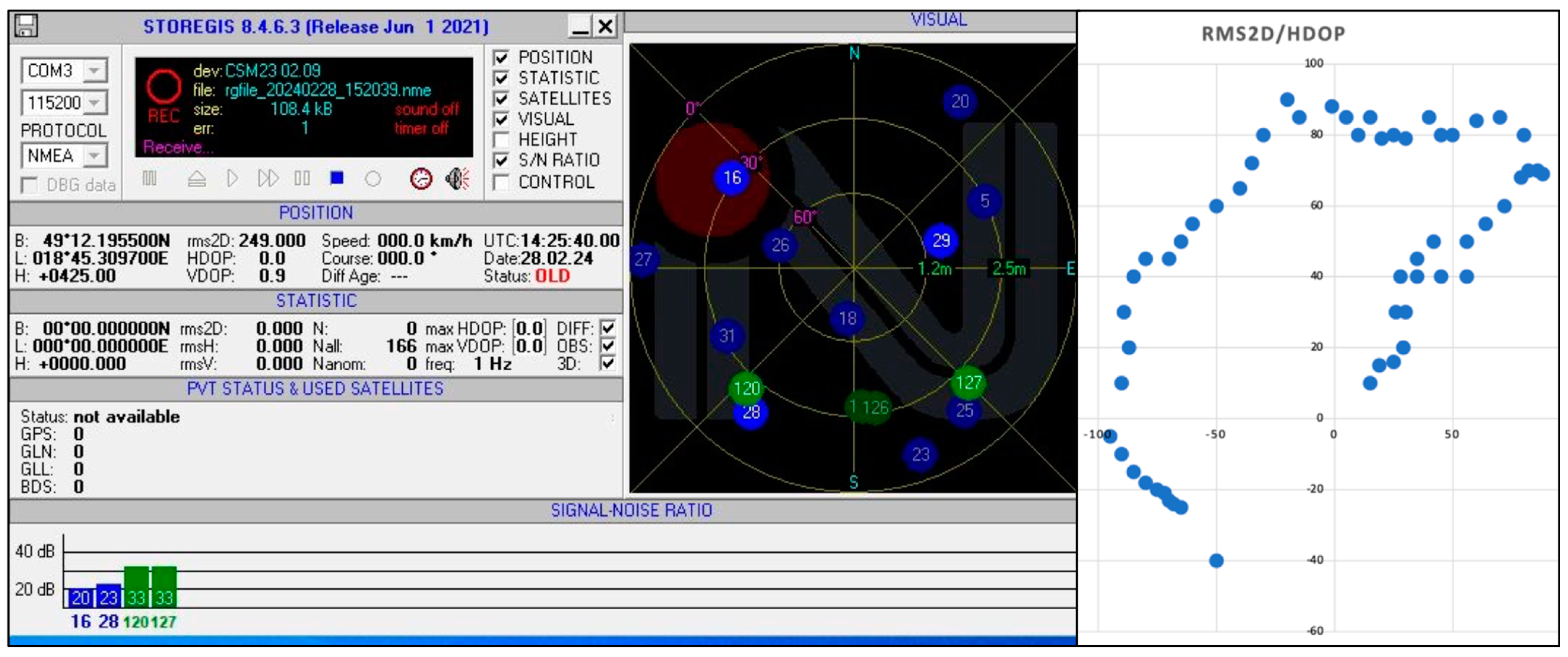
- Signal reception and analysis: The transmitted signal was analyzed using an NV08C-CSM integrated satellite navigation receiver. Measurements of signal reception, including changes in course, accuracy measures (such as 2DRMS), and interference effects on the receiver, were documented and analyzed.
- Assessment of interference power and distance: calculations and assessments were conducted to determine the interference power level, critical interference threshold, and maximum distance within which interference could disrupt the GNSS receiver.
- Documentation and comparison: results obtained from the transmitted spoof signal were compared with reference measurements taken without the artificial signal to evaluate the impact on the receiver’s performance and accuracy.
3. Results
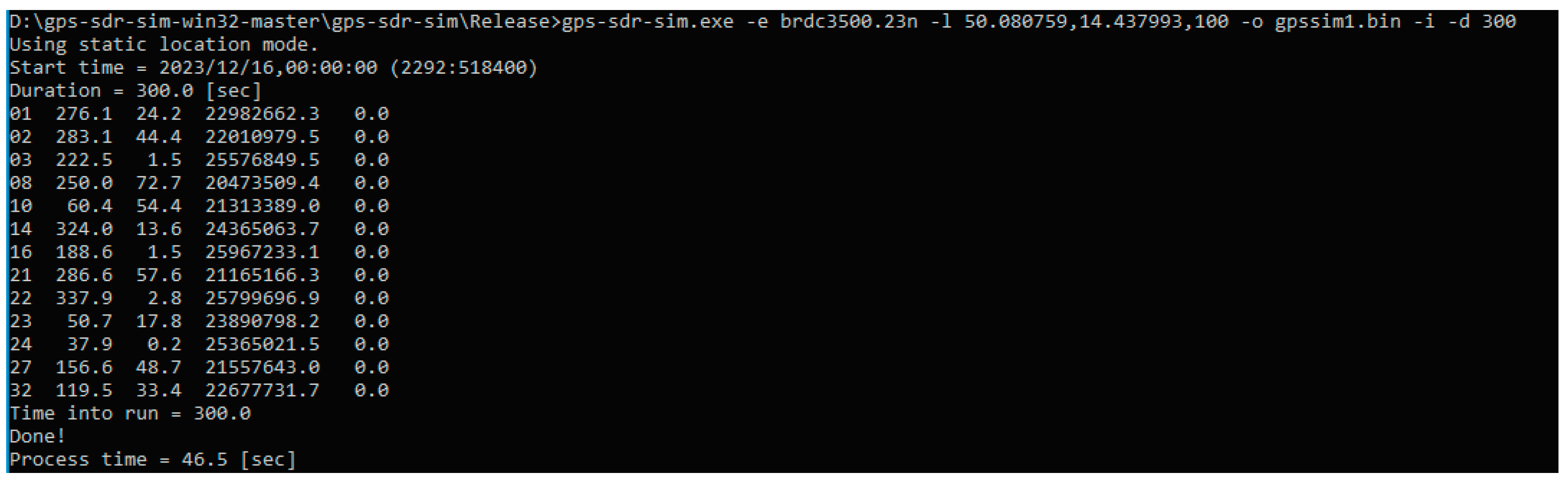
3.1. Generation of GPS Signal
- “gps sdr-sim” is software, through which it is possible to connect the created binary file and distribute it through RTL-SDR HackRF One;
- “-e <gps_nav>” is RINEX navigation file for GPS ephemerides;
- “brdc3500.23n” is the most recent daily GPS broadcast ephemeris file published by NASA on the daily basis;
- “-l <location>” are latitudinal, longitudinal and height coordinates (static mode), e.g., 50.080759,14.437993,100.
3.2. Power and Distance of Interfering Signal Assessment
3.3. Detection and Mitigation of Spoofing
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hoffman-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS-Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer and Science & Business Media: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-211-73012-6. [Google Scholar]
- Radočaj, D.; Plaščak, I.; Jurišić, M. Global navigation satellite systems as state-of-the-art solutions in precision agriculture: A review of studies indexed in the web of science. Agriculture 2023, 13, 1417. [Google Scholar] [CrossRef]
- Marz, S.; Schlicht, A.; Hugentobler, U. Toward a Geodesy and Time Reference in Space (GETRIS): A Study of Apparent Satellite Clocks of a Future GNSS Satellite Constellation. Geosciences 2023, 13, 173. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A comprehensive review of recent research trends on unmanned aerial vehicles (uavs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Budiyono, A.; Higashino, S.I. A Review of the Latest Innovations in UAV Technology. J. Instrum. Autom. Syst. 2023, 10, 7–16. [Google Scholar] [CrossRef]
- Milota, J. Software Radios: Survey, Critical Evaluation and Future Directions. IEEE Aerosp. Electron. Syst. Mag. 1993, 8, 25–36. [Google Scholar] [CrossRef]
- Del Barrio, A.A.; Manzano, J.P.; Maroto, V.M.; Villarín, Á.; Pagán, J.; Zapater, M.; Ayala, J.; Hermida, R. HackRF+ GNU Radio: A software-defined radio to teach communication theory. Int. J. Electr. Eng. Educ. 2023, 60, 23–40. [Google Scholar] [CrossRef]
- Mori, S.; Mizutani, K.; Harada, H. Software-Defined Radio-Based 5G Physical Layer Experimental Platform for Highly Mobile Environments. IEEE Open J. Veh. Technol. 2023, 4, 230–240. [Google Scholar] [CrossRef]
- Hrúz, M.; Bugaj, M.; Novák, A.; Kandera, B.; Badánik, B. The Use of UAV with Infrared Camera and RFID for Airframe Condition Monitoring. Appl. Sci. 2021, 11, 3737. [Google Scholar] [CrossRef]
- Kakkavas, G.; Tsitseklis, K.; Karyotis, V.; Papavassiliou, S. A software defined radio cross-layer resource allocation approach for cognitive radio networks: From theory to practice. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 740–755. [Google Scholar] [CrossRef]
- Bargarai, F.; Abdulazeez, A.; Tiryaki, V.; Zeebaree, D. Management of wireless communication systems using artificial intelligence-based software defined radio. IJIM 2020, 14, 107–133. [Google Scholar] [CrossRef]
- Kumar, B.P.; Paidimarry, C.S. Improved real time GPS RF data capturing for GNSS SDR applications. Gyroscopy Navig. 2020, 11, 59–67. [Google Scholar] [CrossRef]
- Flak, P. Drone detection sensor with continuous 2.4 GHz ISM band coverage based on cost-effective SDR platform. IEEE Access 2021, 9, 114574–114586. [Google Scholar] [CrossRef]
- Aboelazm, M.A. Design and implementation of analog modulated signals radio monitoring receiver based on SDR technology. J. Inf. Hiding Multimed. Signal Process. 2022, 13, 64–77. [Google Scholar]
- Woh, M.; Lin, Y.; Seo, S.; Mahlke, S.; Mudge, T.; Chakrabarti, C.; Bruce, R.; Kershaw, D.; Reid, A.; Wilder, M.; et al. From SODA to scotch: The evolution of a wireless baseband processor. In Proceedings of the 2008 41st IEEE/ACM International Symposium on Microarchitecture, Lake Como, Italy, 8–12 November 2008; pp. 152–163. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhan, X.; Xu, H. Development and Validation of a Low-cost GPS Spoofing Simulator. J. Aeronaut. Astronaut. Aviat. 2014, 46, 78–86. [Google Scholar] [CrossRef]
- Dovis, F. GNSS Interference Threats and Countermeasures; Artech House: Norwood, MA, USA, 2015; ISBN 978-1-60807-810-3. [Google Scholar]
- Broumandan, A.; Jafarnia-Jahromi, A.; Daneshmand, S.; Lachapelle, G. Overview of spatial processing approaches for GNSS structural interference detection and mitigation. Proc. IEEE 2016, 104, 1246–1257. [Google Scholar] [CrossRef]
- De Wilde, W.; Cuypers, G.; Sleewaegen, J.M.; Deurloo, R.; Bougard, B. GNSS interference in unmanned aerial systems. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Oregon, Portland, 12–16 September 2016; pp. 1465–1476. [Google Scholar] [CrossRef]
- Motella, B.; Savasta, S.; Margaria, D.; Dovis, F. Method for assessing the interference impact on GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1416–1432. [Google Scholar] [CrossRef]
- Qiao, J.; Lu, Z.; Lin, B.; Song, J.; Xiao, Z.; Wang, Z.; Li, B. A survey of GNSS interference monitoring technologies. Front. Phys. 2023, 11, 1133316. [Google Scholar] [CrossRef]
- Silva Lorraine, K.J.; Ramarakula, M. A comprehensive survey on GNSS interferences and the application of neural networks for anti-jamming. IETE J. Res. 2023, 69, 4286–4305. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, T. A new GNSS interference detection method based on rearranged wavelet–hough transform. Sensors 2021, 21, 1714. [Google Scholar] [CrossRef] [PubMed]
- Gadgets, G.S. HackRF One-Great Scott Gadgets. 2023. Available online: https://greatscottgadgets.com/hackrf/one (accessed on 30 November 2023).
- Elghamrawy, H.; Karaim, M.; Tamazin, M.; Noureldin, A. Experimental evaluation of the impact of different types of jamming signals on commercial GNSS receivers. Appl. Sci. 2020, 10, 4240. [Google Scholar] [CrossRef]
- McGraw, G.A.; Groves, P.D.; Ashman, B.W. Robust positioning in the presence of multipath and NLOS GNSS signals. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020; Volume 1, pp. 551–589. [Google Scholar] [CrossRef]
- Ding, M.; Chen, W.; Ding, W. Performance analysis of a normal GNSS receiver model under different types of jamming signals. Measurement 2023, 214, 112786. [Google Scholar] [CrossRef]
- ICAO. Doc 8071-Manual on Testing of Radio Navigation Aids. Volume II, Testing of Satellite Based Radio Navigation Aids, 5th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2006. [Google Scholar]
- Gao, G.X.; Sgammini, M.; Lu, M.; Kubo, N. Protecting GNSS receivers from jamming and interference. Proc. IEEE 2016, 104, 1327–1338. [Google Scholar] [CrossRef]
- Li, Y.; Feng, B.; Zhang, W. Mutual Interference Mitigation of Millimeter-Wave Radar Based on Variational Mode Decomposition and Signal Reconstruction. Remote Sens. 2023, 15, 557. [Google Scholar] [CrossRef]
- Li, A.; Spano, D.; Krivochiza, J.; Domouchtsidis, S.; Tsinos, C.G.; Masouros, C.; Chatzinotas, S.; Li, Y.; Vucetic, B.; Ottersten, B. A tutorial on interference exploitation via symbol-level precoding: Overview, state-of-the-art and future directions. IEEE Commun. Surv. Tutor. 2020, 22, 796–839. [Google Scholar] [CrossRef]
- Boyer, M.; Bouyer, L.; Roy, J.S.; Campeau-Lecours, A. Reducing Noise, Artifacts and Interference in Single-Channel EMG Signals: A Review. Sensors 2023, 23, 2927. [Google Scholar] [CrossRef] [PubMed]
- Ru, Z.; Moseley, N.A.; Klumperink, E.A.; Nauta, B. Digitally enhanced software-defined radio receiver robust to out-of-band interference. IEEE J. Solid-State Circuits 2009, 44, 3359–3375. [Google Scholar] [CrossRef]
- Rahman, M.; Haider, A.; Naghshvarianjahromi, M. A systematic methodology for the time-domain ringing reduction in UWB band-notched antennas. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 482–486. [Google Scholar] [CrossRef]
- Osechas, O.; Fohlmeister, F.; Dautermann, T.; Felux, M. Impact of GNSS-band radio interference on operational avionics. NAVIGATION J. Inst. Navig. 2022, 69, navi.516. [Google Scholar] [CrossRef]
- Le Roy, F.; Roland, C.; Le Jeune, D.; Diquet, J.P. Risk assessment of SDR-based attacks with UAVs. In Proceedings of the 16th International Symposium on Wireless Communication Systems, Oulu, Finland, 27–30 August 2019; pp. 222–226. [Google Scholar] [CrossRef]
- Huang, L.; Lu, Z.; Xiao, Z.; Ren, C.; Song, J.; Li, B. Suppression of jammer multipath in GNSS antenna array receiver. Remote Sens. 2022, 14, 350. [Google Scholar] [CrossRef]
- Su, X.L.; Zhan, X.; Tu, J. GNSS Constellation Integrity Evaluation Based on Quality Control. J. Aeronaut. Astronaut. Aviat. 2016, 48, 37–46. [Google Scholar] [CrossRef]
- Spens, N.; Lee, D.K.; Nedelkov, F.; Akos, D. Detecting GNSS jamming and spoofing on Android devices. NAVIGATION J. Inst. Navig. 2022, 69, navi.537. [Google Scholar] [CrossRef]
- Sharifi-Tehrani, O.; Sabahi, M.F.; Danaee, M.R. Low-complexity framework for GNSS jamming and spoofing detection on moving platforms. IET Radar Sonar Navig. 2020, 14, 2027–2038. [Google Scholar] [CrossRef]
- Falletti, E.; Gamba, M.T.; Pini, M. Design and analysis of activation strategies for adaptive notch filters to suppress GNSS jamming. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3718–3734. [Google Scholar] [CrossRef]
- Bažec, M.; Dimc, F.; Pavlovčič-Prešeren, P. Evaluating the vulnerability of several geodetic GNSS receivers under chirp signal L1/E1 jamming. Sensors 2020, 20, 814. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Cui, X.; Xu, H.; Lu, M. A two-stage interference suppression scheme based on antenna array for GNSS jamming and spoofing. Sensors 2019, 19, 3870. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhu, X.; Ouyang, M.; Li, W.; Chen, Z.; Fu, Q. GNSS spoofing jamming detection based on generative adversarial network. IEEE Sens. J. 2021, 21, 22823–22832. [Google Scholar] [CrossRef]
- Meng, L.; Yang, L.; Yang, W.; Zhang, L. A survey of GNSS spoofing and anti-spoofing technology. Remote Sens. 2022, 14, 4826. [Google Scholar] [CrossRef]
- Khan, S.Z.; Mohsin, M.; Iqbal, W. On GPS spoofing of aerial platforms: A review of threats, challenges, methodologies, and future research directions. PeerJ Comput. Sci. 2021, 7, e507. [Google Scholar] [CrossRef]
- Gaspar, J.; Ferreira, R.; Sebastião, P.; Souto, N. Capture of UAVs through GPS spoofing using low-cost SDR platforms. Wirel. Pers. Commun. 2020, 115, 2729–2754. [Google Scholar] [CrossRef]
- Haljaková, P.; Novák, A.; Žižka, J. Monitoring GNSS signal quality at Žilina airport. New Trends in Civil Aviation. In Proceedings of the 19th International Conference on New Trends in Civil Aviation, Prague, Czech Republic, 7–8 December 2017; pp. 289–293, ISBN 978-0-8153-7602-6. [Google Scholar]
- Van Rychlicki, M.; Kasprzyk, Z.; Rosiński, A. Analysis of accuracy and reliability of different types of GPS receivers. Sensors 2020, 20, 6498. [Google Scholar] [CrossRef]
- Gúcky, J.; Kováčiková, K.; Novák, A.; Bugaj, M. Analysis of the introduction of artificial intelligence in the control of UAV. In Proceedings of the New Trends in Aviation Development 2022, Novy Smokovec, Slovakia, 24–25 November 2022; pp. 67–70. [Google Scholar] [CrossRef]
- Kerns, A.K.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned Aircraft Capture and Control via GPS Spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Terris-Gallego, R.; López-Salcedo, J.A.; Seco-Granados, G.; Fernandez-Hernandez, I. Preliminary Evaluation of Galileo ACAS using Existing E1-E6 Open Signals and a Low-Cost SDR Platform. In Proceedings of the 36th International Technical Meeting of the Satellite Division of the Institute of Navigation, Denver, CO, USA, 11–15 September 2023; pp. 1388–1402. [Google Scholar] [CrossRef]
- Nayfeh, M.; Li, Y.; Shamaileh, K.A.; Devabhaktuni, V.; Kaabouch, N. Machine Learning Modeling of GPS Features with Applications to UAV Location Spoofing Detection and Classification. Comput. Secur. 2023, 126, 103085. [Google Scholar] [CrossRef]
- Bi, S.; Li, K.; Hu, S.; Ni, W.; Wang, C.; Wang, X. Detection and Mitigation of Position Spoofing Attacks on Cooperative UAV Swarm Formations. IEEE Trans. Inf. Forensics Secur. 2024, 19, 1883–1895. [Google Scholar] [CrossRef]
- Martinez Quintero, J.C.; Estupiñan Cuesta, E.P.; Ramirez Lopez, L.J. A new method for the detection and identification of the replay attack on cars using SDR technology and classification algorithms. Results Eng. 2023, 19, 101243. [Google Scholar] [CrossRef]
- Broadcast Ephemeris Data. National Aeronautics and Space Administration. 2023. Available online: https://cddis.nasa.gov/Data_and_Derived_Products/GNSS/broadcast_ephemeris_data.html (accessed on 30 November 2023).
- Zhang, T.; Song, T.; Chen, D.; Zhang, T.; Zhuang, J. WiGrus: A WiFi-based gesture recognition system using software-defined radio. IEEE Access 2019, 7, 131102–131113. [Google Scholar] [CrossRef]
- Borio, D.; Gioia, C. Interference mitigation: Impact on GNSS timing. GPS Solut. 2021, 25, 37. [Google Scholar] [CrossRef]
- Morong, T.; Puričer, P.; Kovář, P. Study of the GNSS Jamming in Real Environment. Int. J. Electron. Telecommun. 2019, 65, 65–70. [Google Scholar] [CrossRef]
- Specht, M. The evaluation of the positioning accuracy of the EGNOS and DGPS systems based on the long-term measurements in the years 2006–2014. Pol. Cartogr. Rev. 2015, 47, 99–108. [Google Scholar] [CrossRef]
- Kalašová, A.; Faith, P.; Mikulski, J. Telematics applications, an important basis for improving the road safety. Tools Transp. Telemat. 2015, 531, 292–299. [Google Scholar] [CrossRef]
- Harre, I. Navgen-Calculation of Position Errors drms, 2drms, cep95 and of the Error Ellipse for p = 0.95. 2009. Available online: http://www.mar-it.com/NavGen/navgen.htm (accessed on 30 November 2023).
- Closas, P.; Arribas, J.; Fernandez-Prades, C. Spoofing detection by a reduced acquisition process. In Proceedings of the 2016 International Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 726–731. [Google Scholar] [CrossRef]
- Jafarnia-Jahromi, A.; Daneshmand, S.; Broumandan, A.; Nielsen, J.; Lachapelle, G. PVT solution authentication based on monitoring the clock state for a moving GNSS receiver. In Proceedings of the European Navigation Conference (ENC), Vienna, Austria, 23–25 April 2013. [Google Scholar]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. Pre-despreading authenticity verification for GPS L1 C/A signals. Inst. Navig. 2014, 61, 1–11. [Google Scholar] [CrossRef]
- Broumandan, X.A.; Jafarnia-Jahromi, A.; Dehghanian, V.; Nielsen, J.; Lachapelle, G. GNSS spoofing detection in handheld receivers based on signal spatial correlation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 479–487. [Google Scholar]
- Broumandan, A.; Jafarnia-Jahromi, A.; Lachapelle, G. Spoofing detection, classification and cancelation (SDCC) receiver architecture for a moving GNSS receiver. GPS Solut. 2014, 19, 475–487. [Google Scholar] [CrossRef]
- Psiaki, X.M.L.; Powell, S.P.; O’Hanlon, B.W. GNSS spoofing detection using high-frequency antenna motion and carrier-phase data. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 2949–2991. [Google Scholar]
- Psiaki, X.M.L.; OHanlon, B.W.; Powell, S.P.; Bhatti, J.A.; Wesson, K.D.; Schofield, T.E.; Humphreys, A. GNSS spoofing detection using two-antenna differential carrier phase. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 2776–2800. [Google Scholar]
- Parro-Jimenez, M.; Ioannides, R.; Crisci, M.; Lopez-Salcedo, J.A. Signal-level integrity monitoring metric for robust GNSS receivers. In Proceedings of the 31st AIAA International Communications Satellite Systems Conference, Florence, Italy, 15–17 October 2013; p. 5613. [Google Scholar] [CrossRef]
- Roberts, X.J. Drones Vulnerable to Terrorist Hijacking, Researchers Say. 2012. Available online: http://www.foxnews.com/tech/2012/06/25/drones-vulnerable-to-terrorist-hijacking-researchers-say (accessed on 5 March 2024).
- UT News, The University of Texas at Austin. UT Austin Researchers Successfully Spoof an $80 Million Yacht at Sea. 2013. Available online: http://news.utexas.edu/2013/07/29/ut-austin-researchers-successfully-spoof-an-80-million-yacht-at-sea (accessed on 5 March 2024).
- Olson, P. Hacking a Phone’s GPS May Have Just Got Easier. Forbes. 2013. Available online: http://www.forbes.com/sites/parmyolson/2015/08/07/gps-spoofing-hackers-defcon/ (accessed on 5 March 2024).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Frequency Range | RF Bandwidth | Sampling Rate | Transmit Power | Price (EUR) |
|---|---|---|---|---|---|
| HackRF One | 1 MHz–6 GHz | 20 MHz | 20 MSPS | Max 10 dBm | 280 |
| BladeRF x-A4 | 47 MHz–6 GHz | 56 MHz | 61.44 MSPS | Max 8 dBm | 540 |
| ADALM-PLUTO | 325–3800 MHz | 20 MHz | 61.44 MSPS | 6 dBm | 230 |
| Measure | Dimensions | Probability [%] | Typical Usage |
|---|---|---|---|
| Root mean square [rms] | 1 | 68 | vertical |
| 2 | 63–68 | horizontal | |
| 3 | 61–68 | 3D | |
| Twice distance rms [2 drms] | 2 | 95–98 | horizontal |
| Circular error probable [CEP] | 2 | 50 | horizontal |
| Horizontal 95 percent accuracy [R95] | 2 | 95 | horizontal |
| Spherical error probable [SEP] | 3 | 50 | 3D |
3DR IRIS+ | Ublox NEO-6M-0 module, HMC5883L compass Concurrent reception of up to single GNSS up to 5 Hz-navigation rate | To combat against jamming, NEO-M6 modules include monitor for continuous wave (narrowband) jammers/interference only. This monitor reports whether jamming has been detected or suspected by the receiver. The receiver monitors the background noise and looks for significant changes. | HackRF One Jamming/spoofing detection Yes/No |
Tarot 650 v 2.2 | Ublox NEO-M8N module, IST8310 compass Concurrent reception of up to 3 GNSS single GNSS up to 10 Hz–navigation rate | To combat against spoofing, NEO-M8N modules include spoofing detection measures to alert the host when signals appear to be suspicious. The receiver combines several checks on the received signals looking for inconsistencies across several parameters. | HackRF One Jamming/spoofing detection Yes/Yes |
DJI INSPIRE 2 | Ublox M8 module, M8030 TK Concurrent reception of up to 2 GNSS up to 10 Hz -navigation rate | To combat against spoofing, NEO-M8 modules include spoofing detection measures to alert the host when signals appear to be suspicious. The receiver combines several checks on the received signals, looking for inconsistencies across several parameters. | HackRF One Jamming/spoofing detection Yes/Yes |
SKY HUNTER | MATEKSYS M8Q-5883 Concurrent reception of up to 2 GNSS up to 10 Hz, single GNSS up to 18 Hz–navigation rate | To combat against spoofing, NEO-M8Q modules include spoofing detection measures to alert the host when signals appear to be suspicious. The receiver combines several checks on the received signals looking for inconsistencies across several parameters | HackRF One Jamming/spoofing detection Yes/Yes |
| Distance d [m] | Attenuation [dB] |
|---|---|
| 10 | 56 |
| 100 | 76 |
| 1000 | 96 |
| 10,000 | 116 |
| Signal | Frequency [MHz] | Wavelength [m] |
|---|---|---|
| GPS L1 C/A | 1575.42 | 0.19 |
| GPS L2 C | 1227.6 | 0.244 |
| GPS L5 | 1176.45 | 0.254 |
| Galileo E5a E5b | 1191.795 | 0.251 |
| Galileo E1 O/S | 1575.42 | 0.19 |
| Galileo E6 PRS + CS | 1278.75 | 0.234 |
| GLONASS G1 SP | 1589.0625–1605.375 | 0.189–0.186 |
| GLONASS G3 CDMA | 1202 | 0.249 |
| Beidou B1 | 1561 | 0.192 |
| Beidou B2 | 1207 | 0.248 |
| Detection | Mitigation |
|---|---|
| Pre-correlation | |
| AGC, ADC monitoring | Blanking/channel exclusion |
| Signal spectrum analysis | Chanel exclusion |
| - | Multi antenna elements |
| Post-correlation | |
| Correlator’s spectral analysis | Notch, SEDLL |
| SQM, channel cross correlation analysis | Channel exclusion |
| INS integration | GNSS exclusion, Channel exclusion (tight), spoofing signal removal (ultra-thing) |
| C/N0, PR noise, PVT, RAIM clock monitoring | Channel exclusion |
| - | Multi antenna elements |
| σy/σx | 1 drms | p (1 drms) | 2 drms | p (2 drms) |
|---|---|---|---|---|
| 0.0 | 1.0 | 0.6827 | 2.0 | 0.9545 |
| 0.25 | 1.0308 | 0.6815 | 2.0616 | 0.9591 |
| 0.5 | 1.1180 | 0.6629 | 2.2361 | 0.9697 |
| 0.75 | 1.25 | 0.6392 | 2.5 | 0.9787 |
| 1.0 | 1.4142 | 0.6320 | 2.8284 | 0.9816 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Novák, A.; Kováčiková, K.; Kandera, B.; Sedláčková, A.N. Global Navigation Satellite Systems Signal Vulnerabilities in Unmanned Aerial Vehicle Operations: Impact of Affordable Software-Defined Radio. Drones 2024, 8, 109. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8030109
Novák A, Kováčiková K, Kandera B, Sedláčková AN. Global Navigation Satellite Systems Signal Vulnerabilities in Unmanned Aerial Vehicle Operations: Impact of Affordable Software-Defined Radio. Drones. 2024; 8(3):109. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8030109
Chicago/Turabian StyleNovák, Andrej, Kristína Kováčiková, Branislav Kandera, and Alena Novák Sedláčková. 2024. "Global Navigation Satellite Systems Signal Vulnerabilities in Unmanned Aerial Vehicle Operations: Impact of Affordable Software-Defined Radio" Drones 8, no. 3: 109. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8030109