
Research on A Global Path-Planning Algorithm for Unmanned Arial Vehicle Swarm in Three-Dimensional Space Based on Theta*–Artificial Potential Field Method

Abstract
:1. Introduction
2. Theta*–Artificial Potential Field Method Path-Planning Algorithm
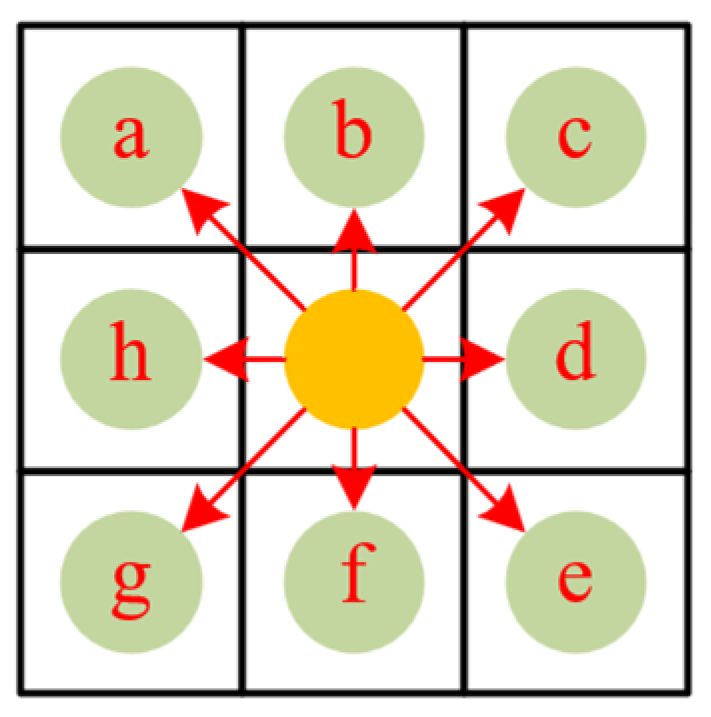
2.1. A* Algorithm
2.1.1. Manhattan Distance
2.1.2. Euclidean Distance
2.1.3. Chebyshev Distance
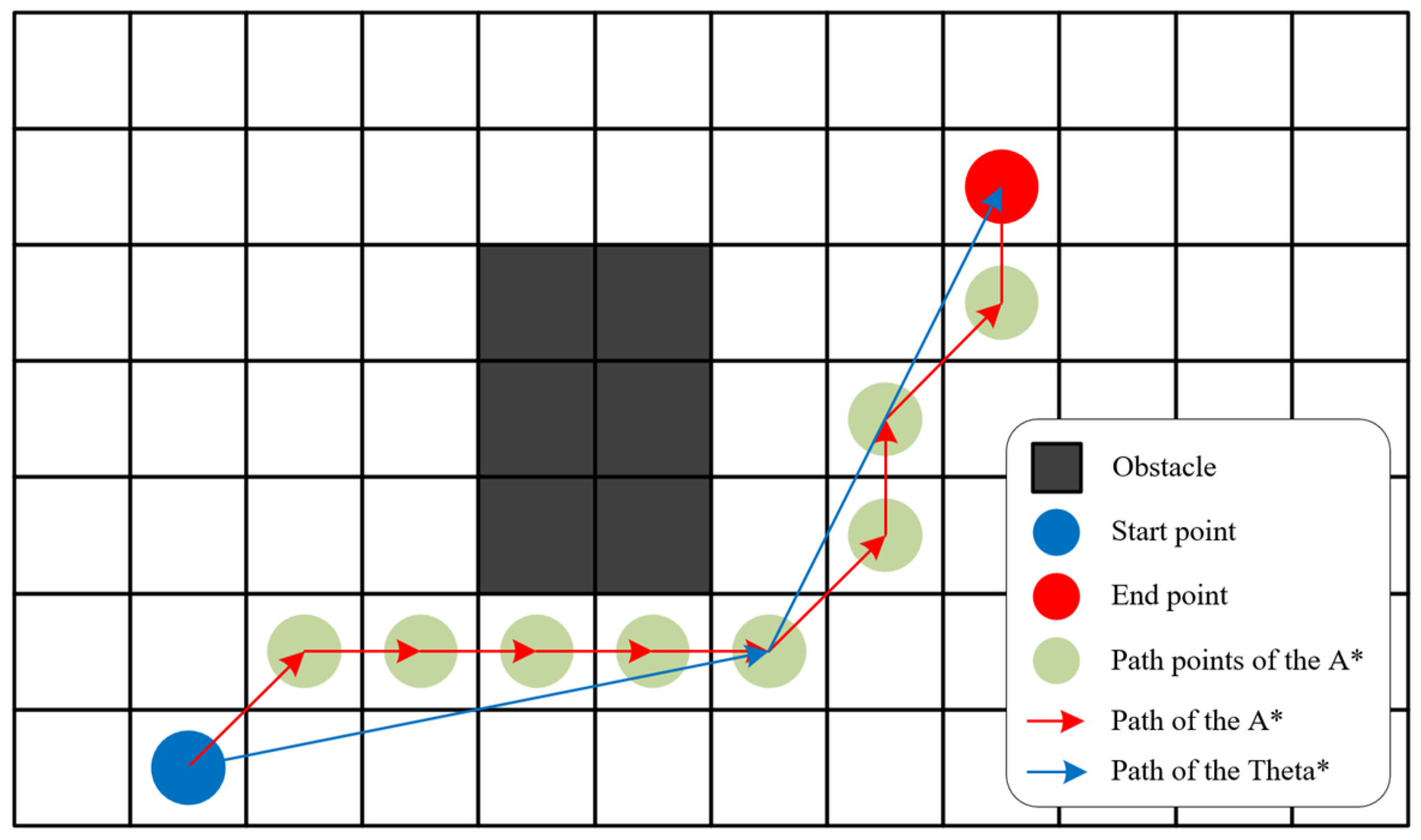
2.2. Theta* Algorithm
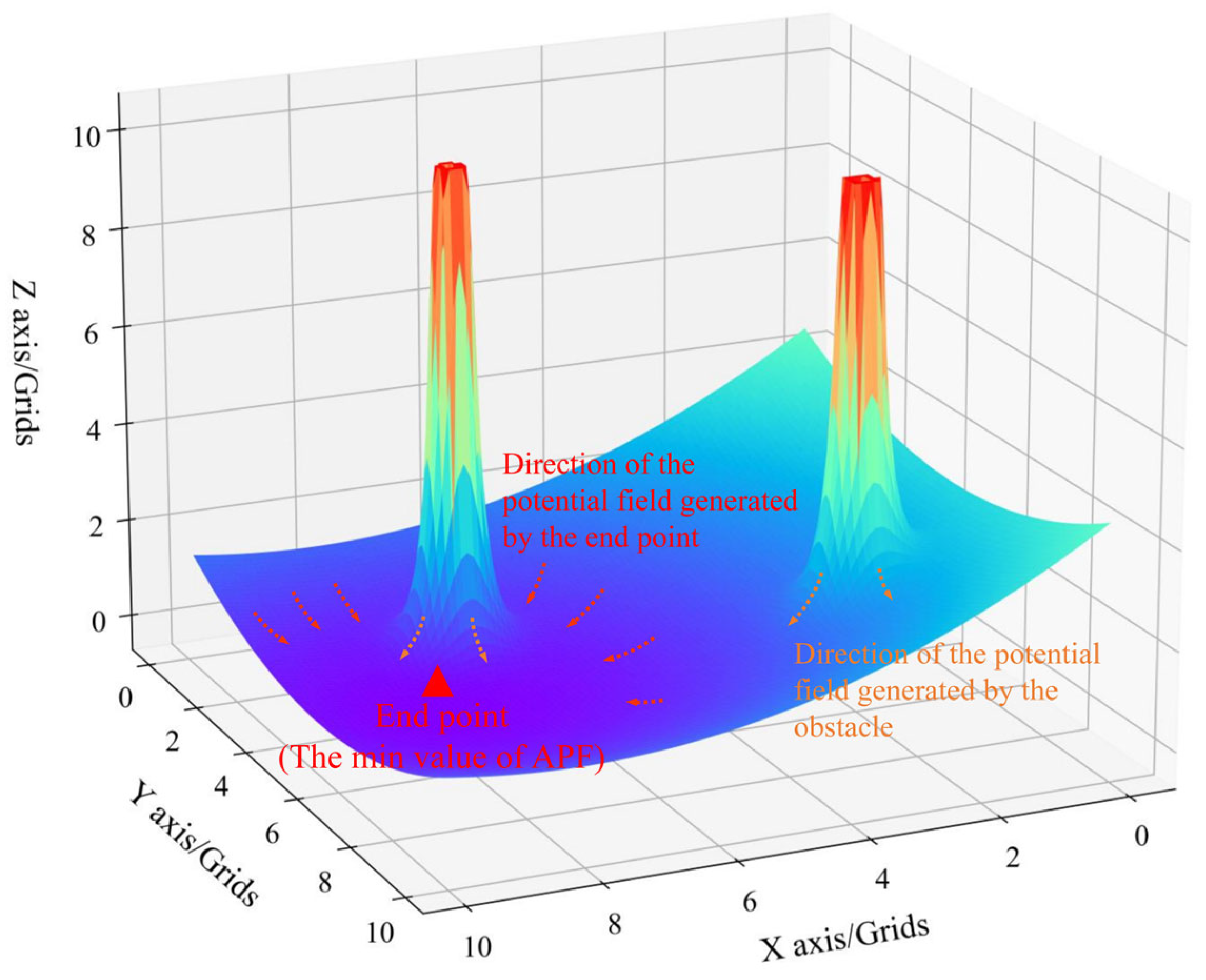
2.3. Heuristic Functions for the Artificial Potential Field Method
3. Drone Formation Organization
3.1. Virtual Pilot Formation-Control Algorithm
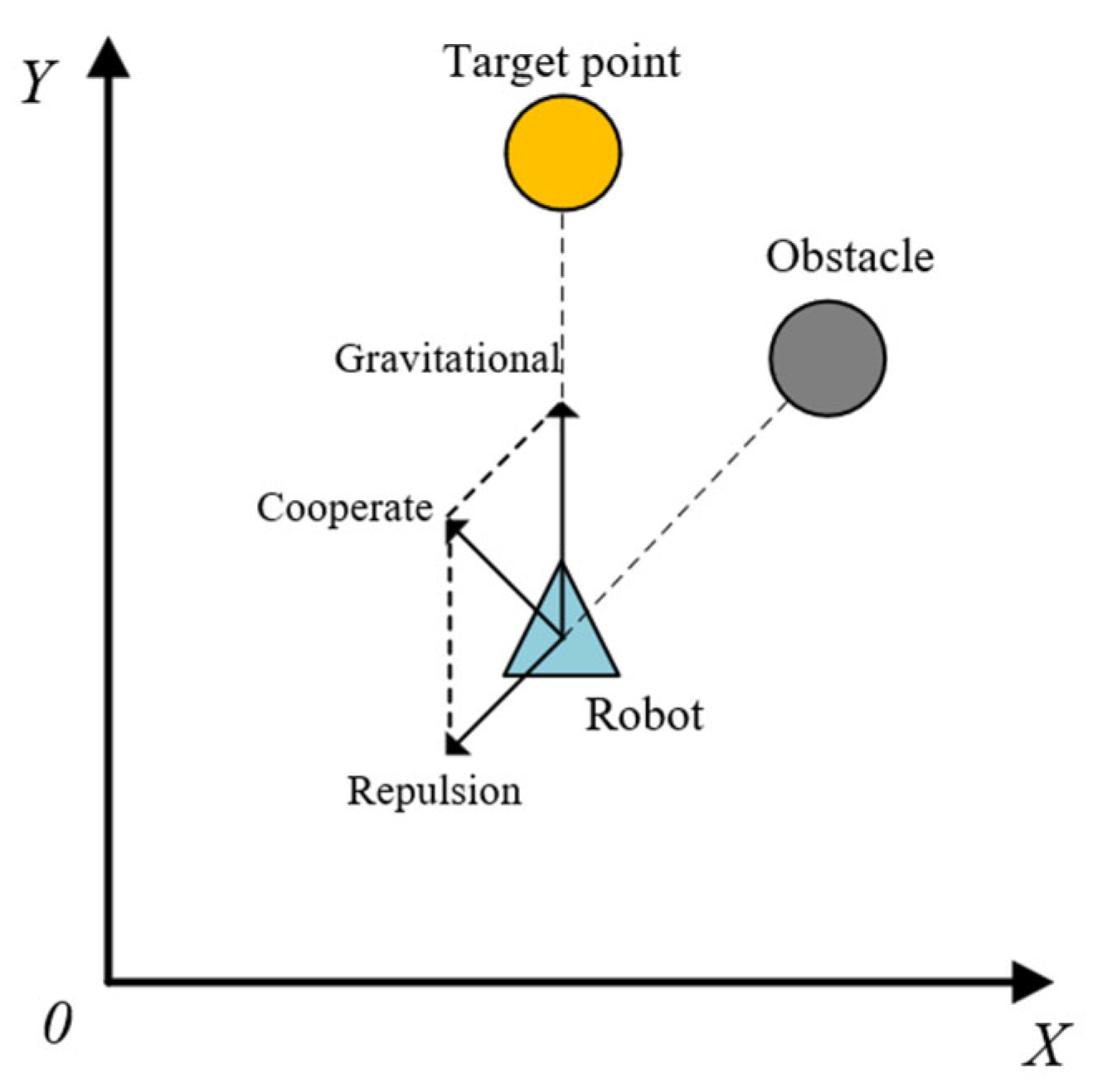
3.2. Global Artificial Potential Field Method
4. Algorithm Validation
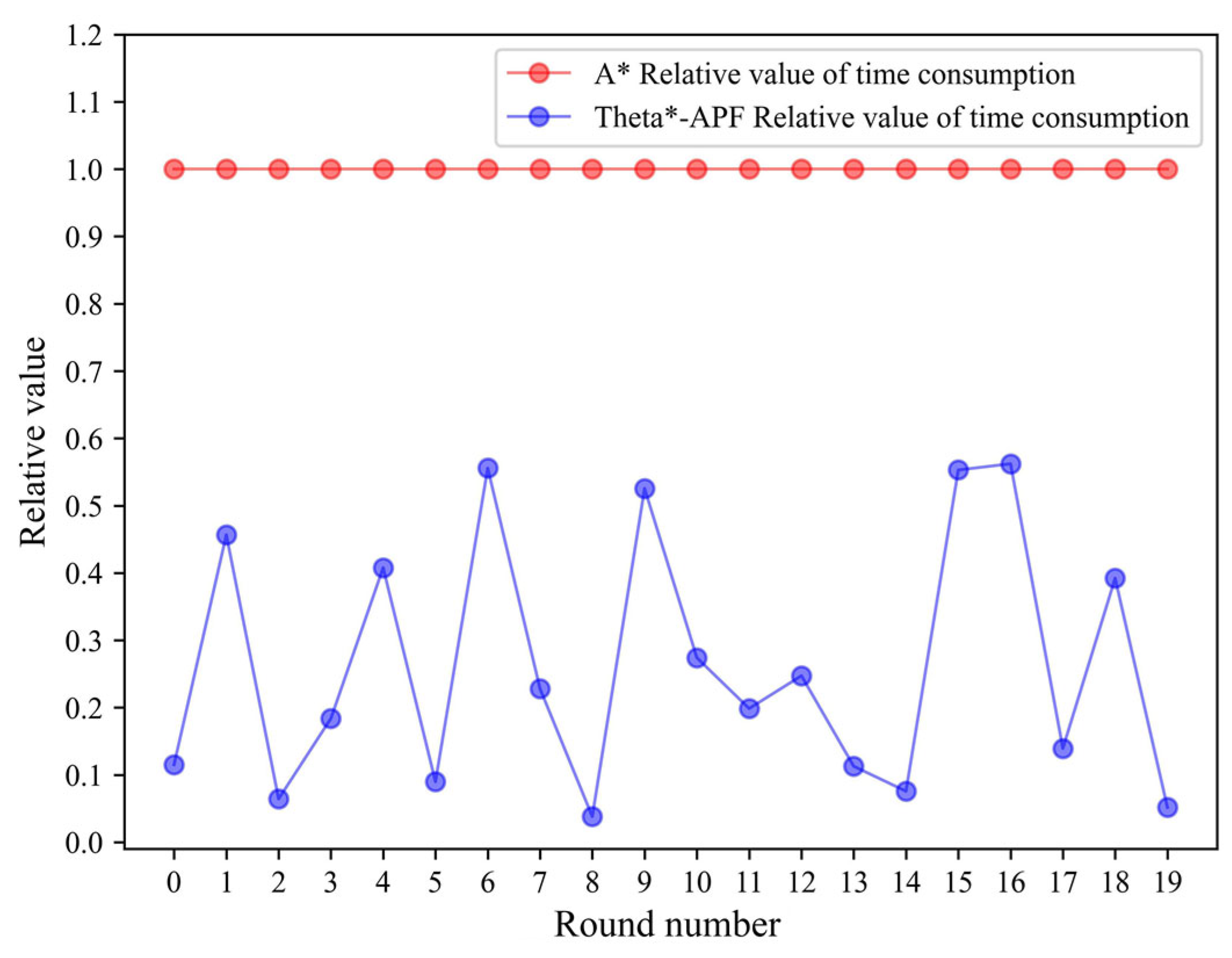
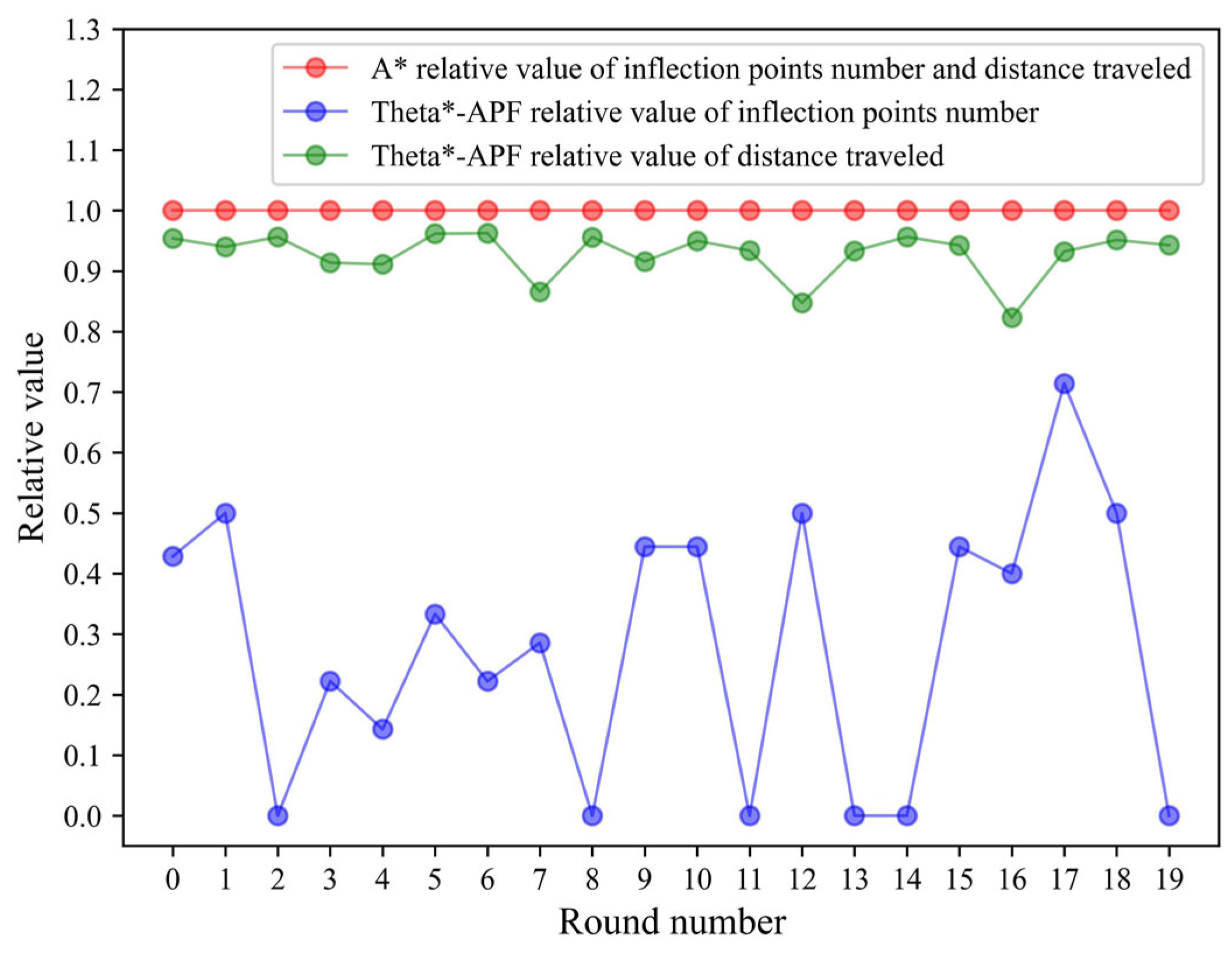
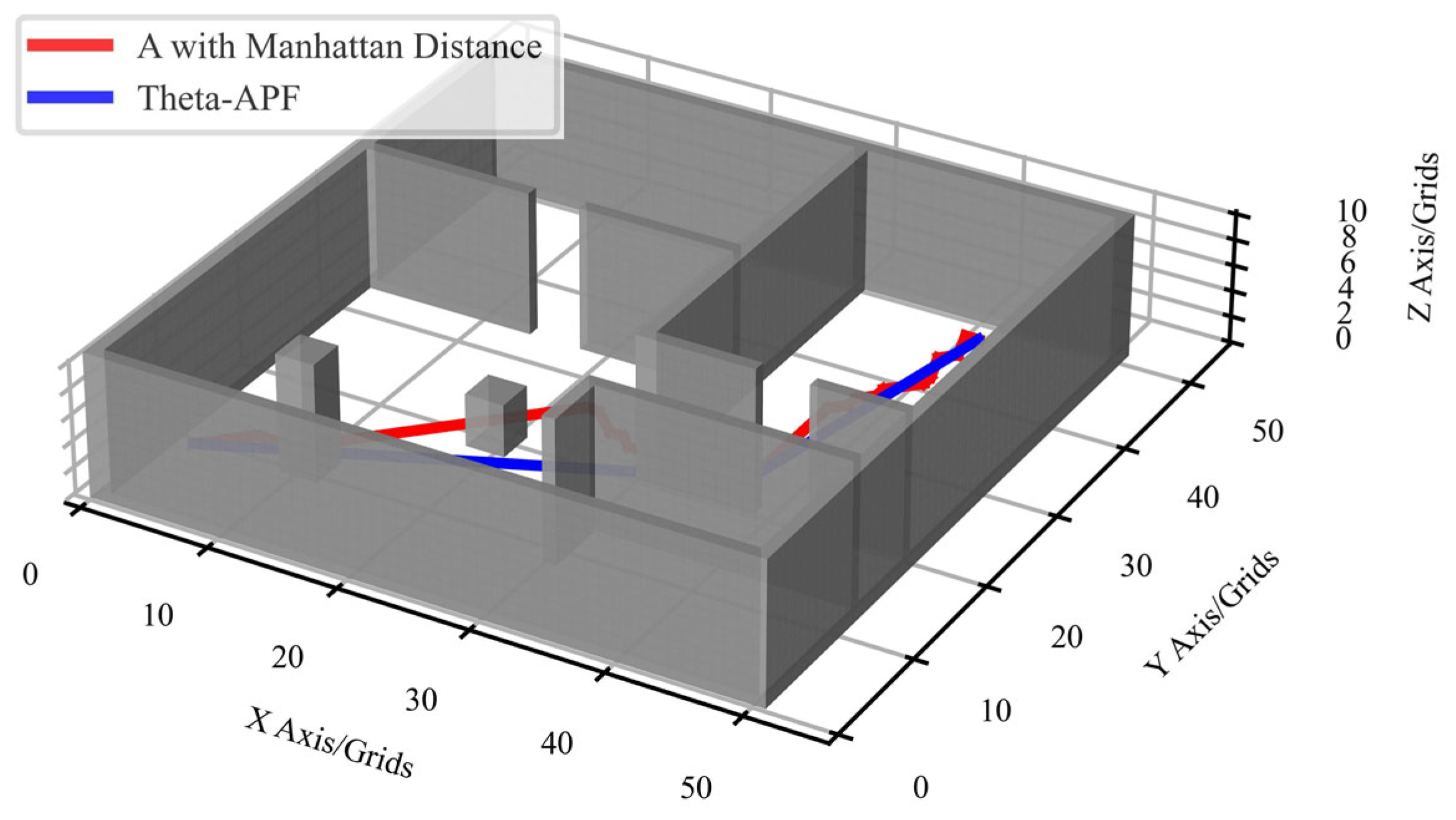
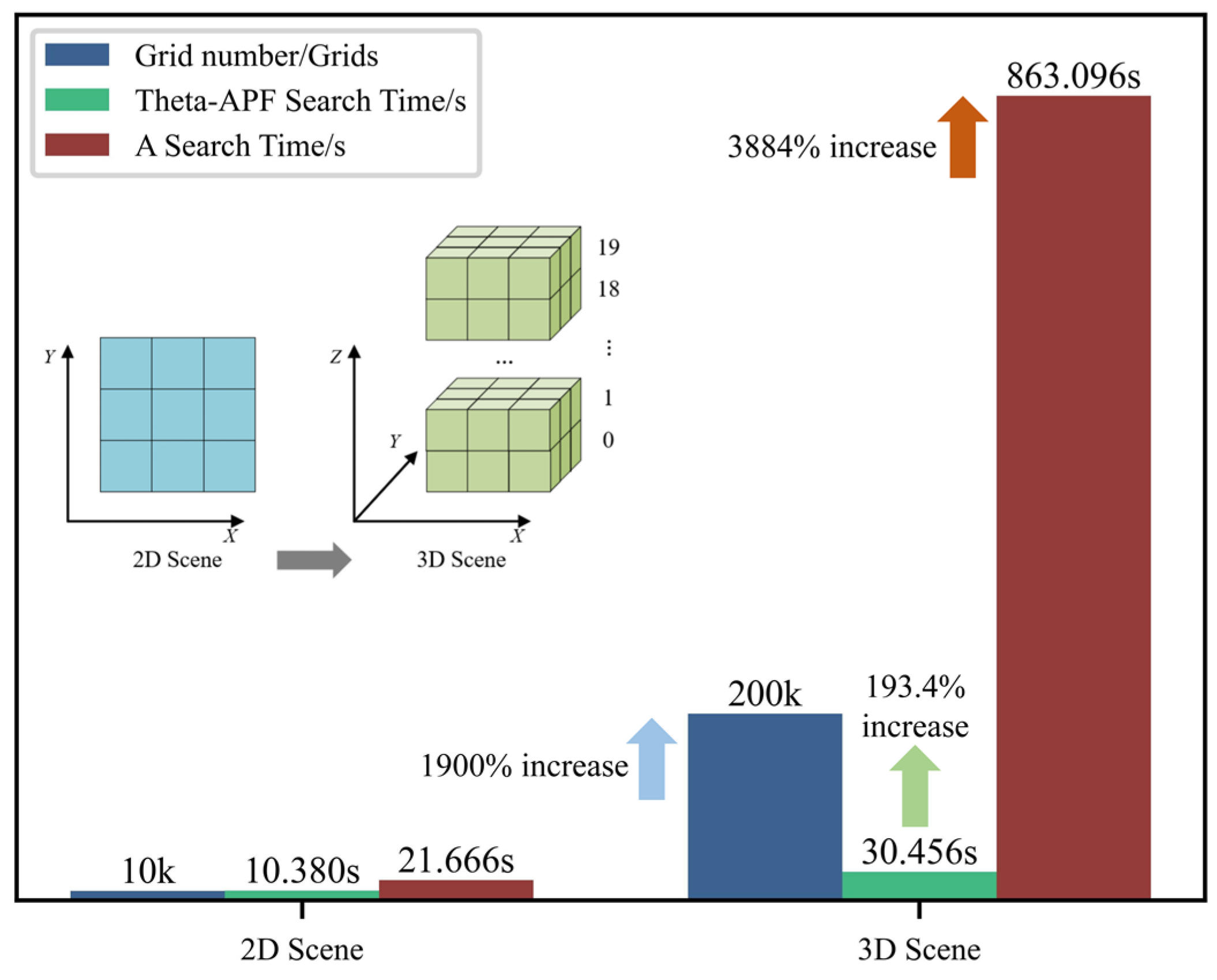
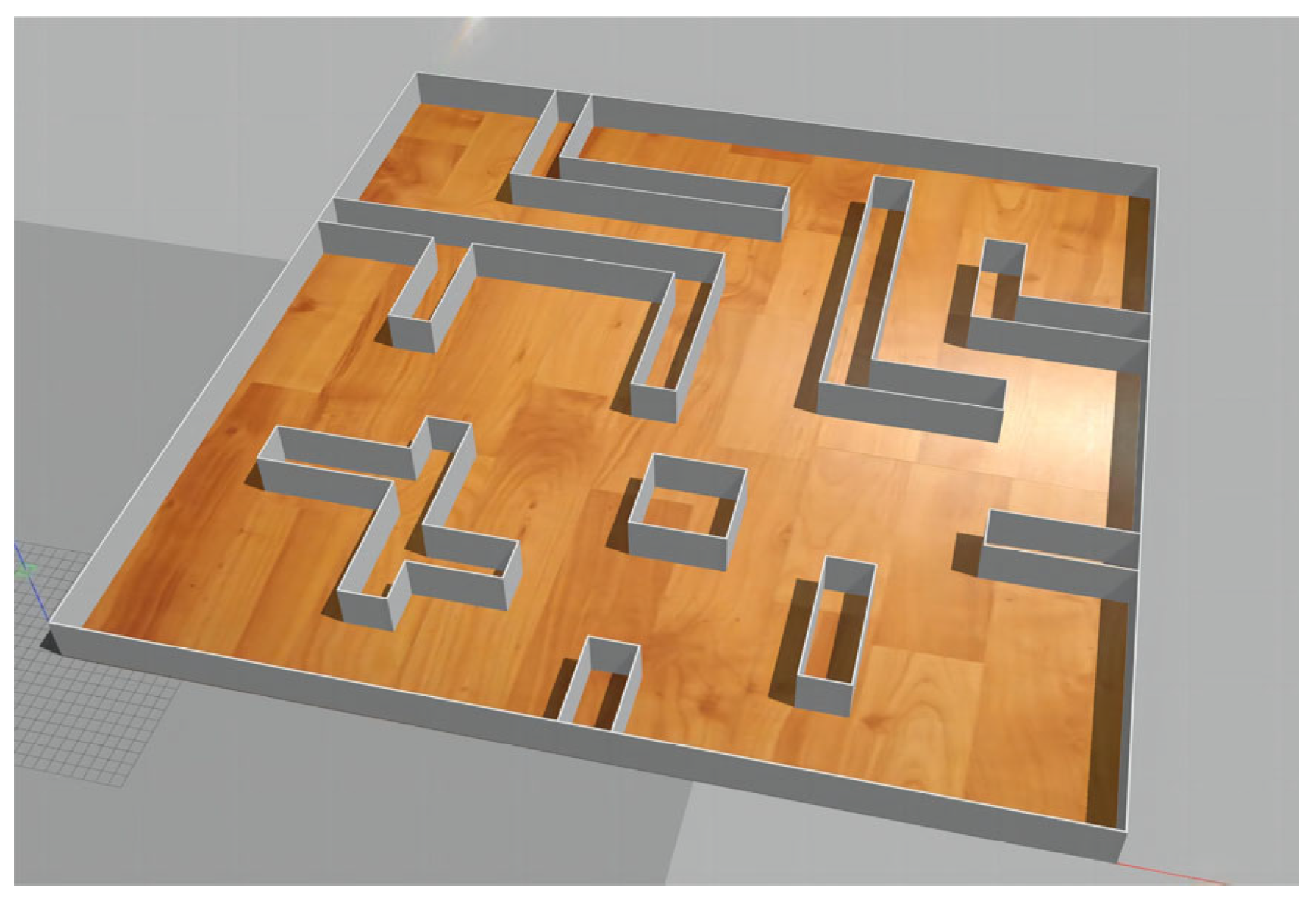
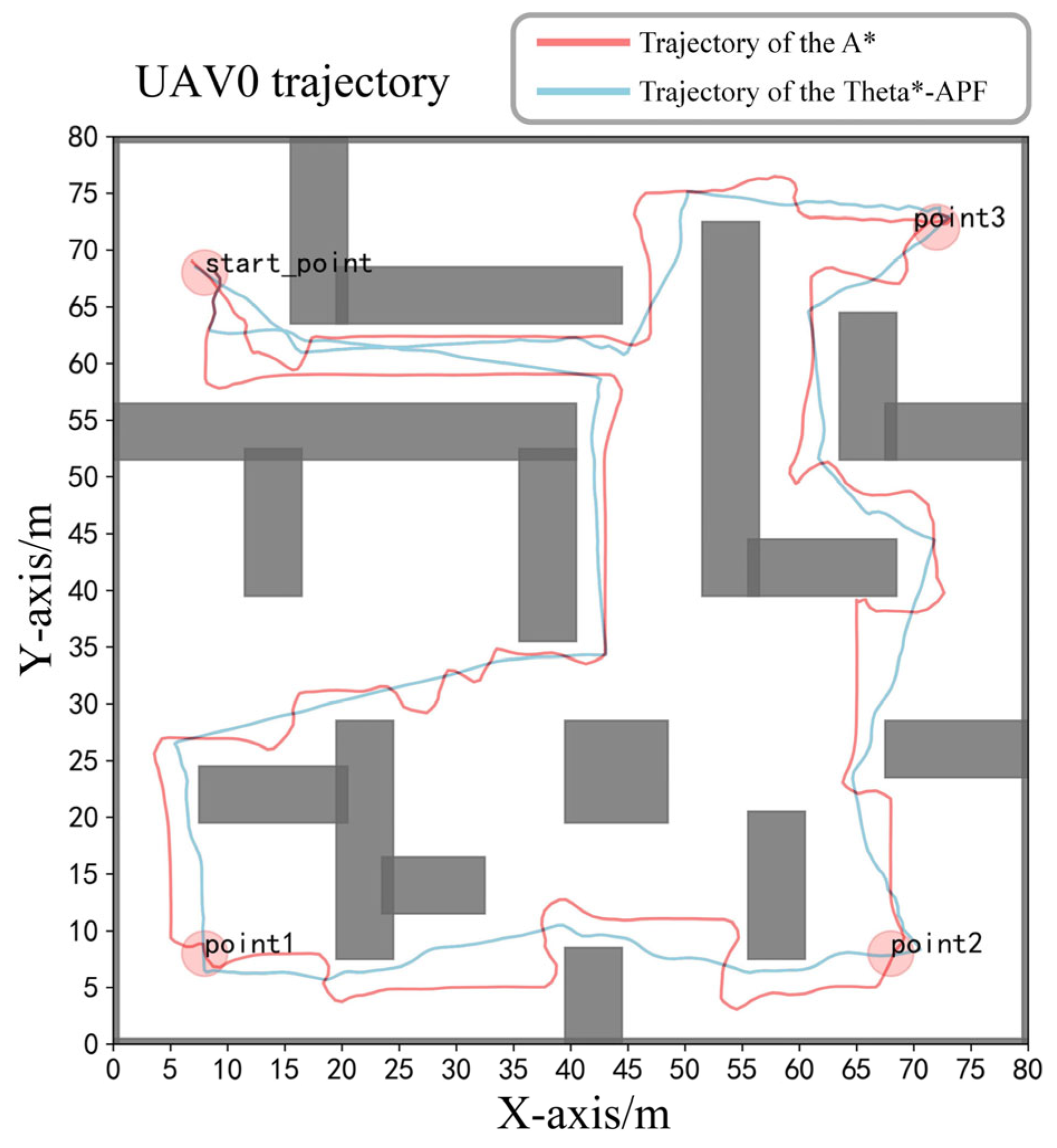
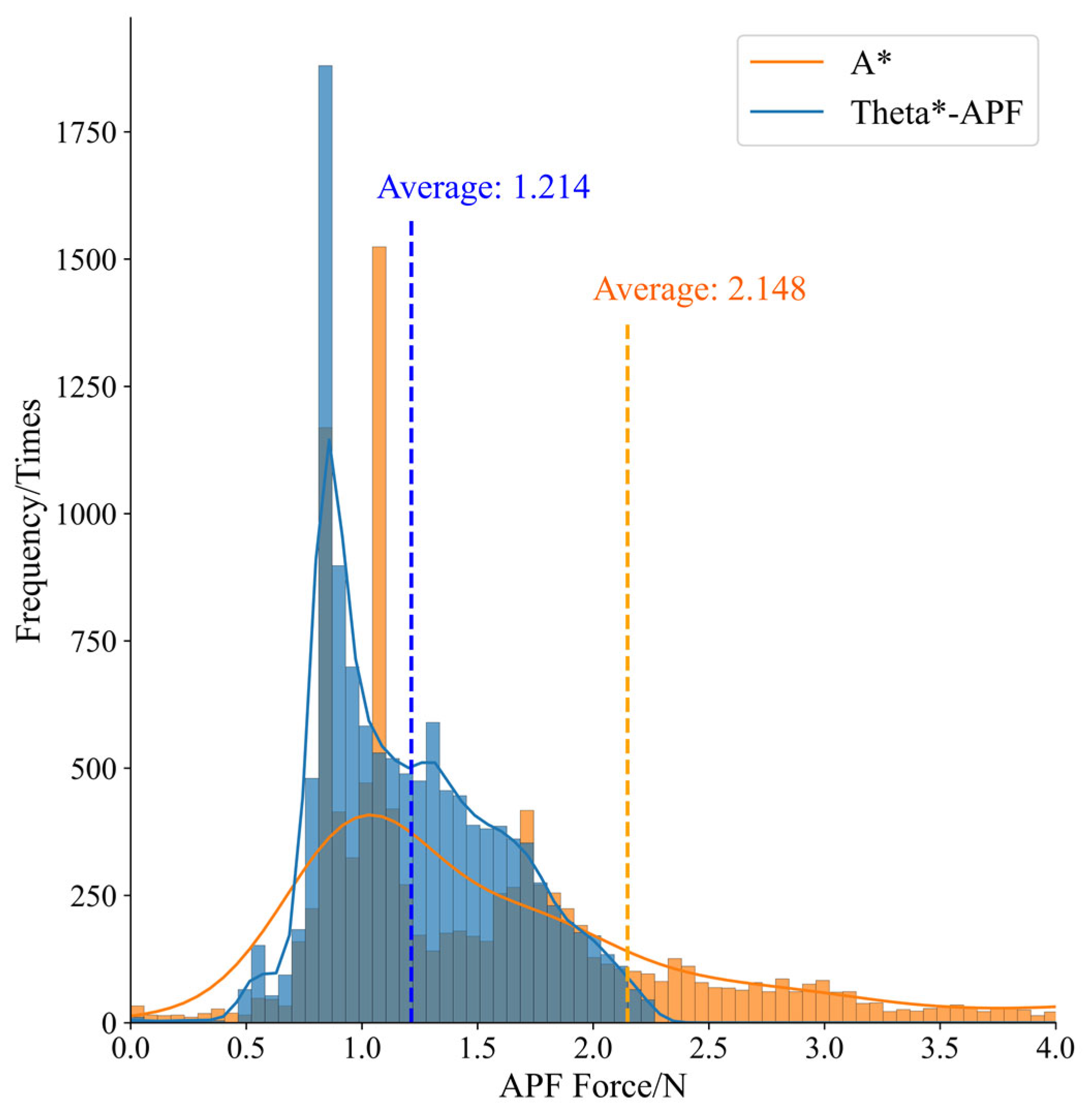
4.1. Simulation of Theta*–APF Algorithm Path Planning
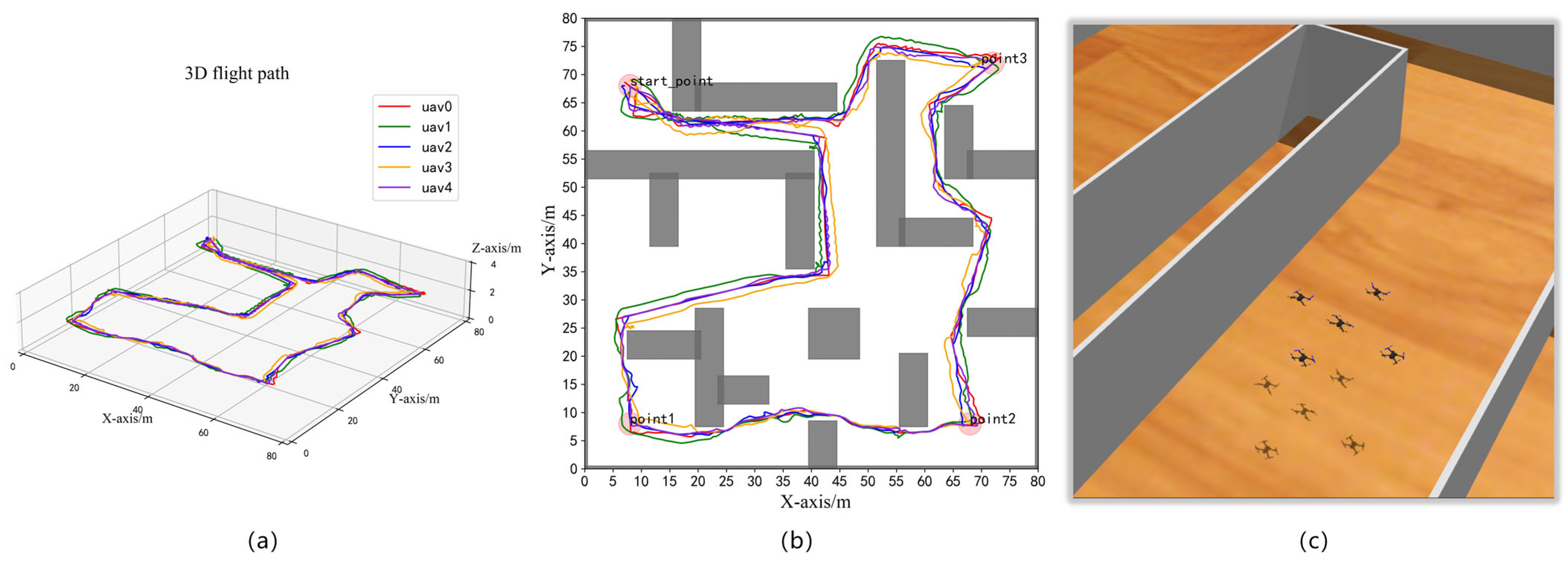
4.2. Simulation of UAV Formation Flight in 3D Environment
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Yan, J.; Zhang, P. Multi-UAV Formation Control Based on a Novel Back-Stepping Approach. IEEE Trans. Veh. Technol. 2020, 69, 2437–2448. [Google Scholar] [CrossRef]
- Shao, S.; Peng, Y.; He, C.; Du, Y. Efficient Path Planning for UAV Formation via Comprehensively Improved Particle Swarm Optimization. ISA Trans. 2020, 97, 415–430. [Google Scholar] [CrossRef] [PubMed]
- Warren, C.W. Global Path Planning Using Artificial Potential Fields. In Proceedings of the 1989 IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; IEEE Computer Society: Washington, DC, USA, 1989; pp. 316–317. [Google Scholar]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment. Auton. Robot. 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Zhu, Z.; Xie, J.; Wang, Z. Global Dynamic Path Planning Based on Fusion of A* Algorithm and Dynamic Window Approach. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5572–5576. [Google Scholar]
- Jin, Q.; Tang, C.; Cai, W. Research on Dynamic Path Planning Based on the Fusion Algorithm of Improved Ant Colony Optimization and Rolling Window Method. IEEE Access 2021, 10, 28322–28332. [Google Scholar] [CrossRef]
- Kothari, M.; Postlethwaite, I. A Probabilistically Robust Path Planning Algorithm for UAVs Using Rapidly-Exploring Random Trees. J. Intell. Robot. Syst. 2013, 71, 231–253. [Google Scholar] [CrossRef]
- Janoš, J.; Vonásek, V.; Pěnička, R. Multi-Goal Path Planning Using Multiple Random Trees. IEEE Robot. Autom. Lett. 2021, 6, 4201–4208. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Yuan, Q. Application of Dijkstra Algorithm in Robot Path-Planning. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Hohhot, China, 15–17 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1067–1069. [Google Scholar]
- Mesquita, R.; Gaspar, P.D. A Path Planning Optimization Algorithm Based on Particle Swarm Optimization for UAVs for Bird Monitoring and Repelling–Simulation Results. In Proceedings of the 2020 International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 8–9 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1144–1148. [Google Scholar]
- Sharma, A.; Shoval, S.; Sharma, A.; Pandey, J.K. Path Planning for Multiple Targets Interception by the Swarm of UAVs Based on Swarm Intelligence Algorithms: A Review. IETE Tech. Rev. 2022, 39, 675–697. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Liu, H.; Chen, J.; Feng, J.; Zhao, H. An Improved RRT* UAV Formation Path Planning Algorithm Based on Goal Bias and Node Rejection Strategy. Unmanned Syst. 2023, 11, 317–326. [Google Scholar] [CrossRef]
- Hoang, V.; Phung, M.D.; Dinh, T.H.; Ha, Q.P. Angle-Encoded Swarm Optimization for Uav Formation Path Planning. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5239–5244. [Google Scholar]
- Chen, H.; Chen, H.; Qiang, L. Multi-UAV 3D Formation Path Planning Based on Improved Artificial Potential Field. J. Syst. Simul. 2020, 32, 414–420. [Google Scholar]
- Chen, Q.; Lu, Y.; Jia, G.; Li, Y.; Zhu, B.; Lin, J. Path Planning for UAVs Formation Reconfiguration Based on Dubins Trajectory. J. Cent. South Univ. 2018, 25, 2664–2676. [Google Scholar] [CrossRef]
- Wu, Z.; Li, J.; Zuo, J.; Li, S. Path Planning of UAVs Based on Collision Probability and Kalman Filter. IEEE Access 2018, 6, 34237–34245. [Google Scholar] [CrossRef]
- Luis, C.E.; Schoellig, A.P. Trajectory Generation for Multiagent Point-to-Point Transitions via Distributed Model Predictive Control. IEEE Robot. Autom. Lett. 2019, 4, 375–382. [Google Scholar] [CrossRef]
- Palossi, D.; Furci, M.; Naldi, R.; Marongiu, A.; Marconi, L.; Benini, L. An Energy-Efficient Parallel Algorithm for Real-Time near-Optimal Uav Path Planning. In Proceedings of the ACM International Conference on Computing Frontiers, Como, Italy, 16–19 May 2016; pp. 392–397. [Google Scholar]
- Yao, J.; Lin, C.; Xie, X.; Wang, A.J.; Hung, C.-C. Path Planning for Virtual Human Motion Using Improved A* Star Algorithm. In Proceedings of the 2010 Seventh International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 12–14 April 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1154–1158. [Google Scholar]
- Zhang, J.; Li, J.; Yang, H.; Feng, X.; Sun, G. Complex Environment Path Planning for Unmanned Aerial Vehicles. Sensors 2021, 21, 5250. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Wang, J.; Zhu, Z.; Yang, D.; Wu, J. Tangent Navigated Robot Path Planning Strategy Using Particle Swarm Optimized Artificial Potential Field. Optik 2018, 158, 639–651. [Google Scholar] [CrossRef]
- Mai, X.; Li, D.; Ouyang, J.; Luo, Y. An Improved Dynamic Window Approach for Local Trajectory Planning in the Environment with Dense Objects. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1884, p. 012003. [Google Scholar] [CrossRef]
- Fan, D.; Shi, P. Improvement of Dijkstra’s Algorithm and Its Application in Route Planning. In Proceedings of the 2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; IEEE: Piscataway, NJ, USA, 2010; Volume 4, pp. 1901–1904. [Google Scholar]
- Chen, J.; Li, M.; Yuan, Z.; Gu, Q. An Improved A* Algorithm for UAV Path Planning Problems. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; IEEE: Piscataway, NJ, USA, 2020; Volume 1, pp. 958–962. [Google Scholar]
- Sánchez-Ibáñez, J.R.; Pérez-del-Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef] [PubMed]
- Desai, J.P.; Ostrowski, J.; Kumar, V. Controlling Formations of Multiple Mobile Robots. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20–20 May 1998; IEEE: Piscataway, NJ, USA, 1998; Volume 4, pp. 2864–2869. [Google Scholar]
- Weitzenfeld, A.; Vallesa, A.; Flores, H. A Biologically-Inspired Wolf Pack Multiple Robot Hunting Model. In Proceedings of the 2006 IEEE 3rd Latin American Robotics Symposium, Santiago, Chile, 26–27 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 120–127. [Google Scholar]
- Lewis, M.A.; Tan, K.-H. High Precision Formation Control of Mobile Robots Using Virtual Structures. Auton. Robot. 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Persson, S.M.; Sharf, I. Sampling-Based A* Algorithm for Robot Path-Planning. Int. J. Robot. Res. 2014, 33, 1683–1708. [Google Scholar] [CrossRef]
- Souissi, O.; Benatitallah, R.; Duvivier, D.; Artiba, A.; Belanger, N.; Feyzeau, P. Path Planning: A 2013 Survey. In Proceedings of the 2013 International Conference on Industrial Engineering and Systems Management (IESM), Rabat, Morocco, 28–30 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar]
- Daniel, K.; Nash, A.; Koenig, S.; Felner, A. Theta*: Any-Angle Path Planning on Grids. J. Artif. Intell. Res. 2010, 39, 533–579. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path-Planning Algorithm | Number of Search Nodes (Grids) | Path Length (Grids) | Inflection Number | Search Time |
|---|---|---|---|---|
| A* Manhattan distance calculation method | 6679 | 137.095 | 6 | 21.666 s |
| Theta*–APF | 4222 | 119.207 | 3 | 10.380 s |
| Path-Planning Algorithm | Path Length (m) |
|---|---|
| A* algorithm | 370.711 |
| Theta*–APF | 325.321 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Li, L.; Wang, Y.; Zhan, H.; Fu, Y.; Song, Y. Research on A Global Path-Planning Algorithm for Unmanned Arial Vehicle Swarm in Three-Dimensional Space Based on Theta*–Artificial Potential Field Method. Drones 2024, 8, 125. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8040125
Zhao W, Li L, Wang Y, Zhan H, Fu Y, Song Y. Research on A Global Path-Planning Algorithm for Unmanned Arial Vehicle Swarm in Three-Dimensional Space Based on Theta*–Artificial Potential Field Method. Drones. 2024; 8(4):125. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8040125
Chicago/Turabian StyleZhao, Wen, Liqiao Li, Yingqi Wang, Hanwen Zhan, Yiqi Fu, and Yunfei Song. 2024. "Research on A Global Path-Planning Algorithm for Unmanned Arial Vehicle Swarm in Three-Dimensional Space Based on Theta*–Artificial Potential Field Method" Drones 8, no. 4: 125. https://0-doi-org.brum.beds.ac.uk/10.3390/drones8040125