In this section we briefly sketch the most salient features concerning the improvements in the software performance by comparing the results of the new program version (PV-II, hereafter) against those of the previous one (PV-II, hereafter). The comparison will be performed on a typical experimental realization [
17,
18,
19] of the bicone system with a bicone with radius
mm, in a cup, with radius
mm, the water bulk subphase being
mm deep. The frequency of the oscillation has been set at
rad/s. In the following, variables obtained by means of program versions PV-I and PV-II will be labeled with subscripts
I and
II, respectively. Regarding practical applications of such data analysis schemes in the lab, the balance between computational cost and computational errors is a key aspect of the problem. Hence, the effect of the mesh size on the numerical results is investigated in detail.
3.1. Velocity Field Configurations
In
Figure 3, we show color coded views of the differences between the velocity fields obtained with both versions of the software. The left panel in
Figure 3 shows the differences between the real parts of the velocity field,
, while the right panel shows the differences between the imaginary parts,
. It is clear that the most significant differences appear close to the interface and, particularly, at the bicone rim. Nevertheless, the observed values, for both the differences between real and imaginary parts are always smaller than
(remember that the highest value of the velocity field amplitude is 1 just at the bicone rim).
According to
Figure 3, relevant differences appear at the interface and just below it. In
Figure 4, we show a comparison between the profiles of the real and imaginary parts of the non-dimensional velocity at the interface obtained with both versions of the software,
(panels to the left) and
(panel to the right), at two different mesh sizes, namely,
(top row) and
(bottom row).
In each graph, we consider three different dynamical situations where continuous and dashed lines represent the real and imaginary parts, respectively. Case A (black lines) represents a viscoelastic interface () at high frequency ( Hz). Case B (red lines) represents a purely viscous interface () at an intermediate frequency ( Hz). Finally, case C (blue lines) refers to a clean air–water interface at low frequency ( Hz). It is clear that the slight piece-wise linear aspect of and at the bicone rim is not present anymore in and . This effect should be more appreciable for interfacial velocity profiles far from linear, i.e., for low interfacial viscosity and high oscillation frequency.
3.2. Interfacial and Subphase Torques
The differences found in the flow field profile just at the rim of the bicone might bring noticeable changes in the interfacial and subphase drag torques and, consequently, in the amplitude ratio. In the following, we will illustrate the influence of mesh spacing and interfacial viscosity on the drag torques just for the case of purely viscous interfaces on top of a water subphase and at a fixed frequency of 0.5 Hz.
In
Figure 5, we show the relative differences in the real,
(solid symbols), and imaginary parts,
(open symbols), of the subphase drag torque,
, between the solutions obtained with different mesh sizes taking as reference the solution obtained for the mesh with the highest resolution used (
mesh). Black, red, and blue symbols correspond to meshes with
,
, and
nodes, respectively. The left and right panels display the results for PV-I and PV-II, respectively.
The results obtained for subphase drag with versions I and II of the program show no apparent differences. This fact can be easily explained, because the subphase drag occurs mostly at the lower surface of the bicone, where the difference between the flow field computed with PV-I and PV-II are negligible. Interestingly, the relative difference in is practically unaffected by the value of the interfacial viscosity .
On the contrary, the interfacial drag torque is determined by the velocity field gradient right at the bicone rim and, consequently, the corresponding figure for the interfacial drag torque is expected to show some differences. Such differences can be appreciated in
Figure 6, where we show the relative differences real part,
(solid symbols), and imaginary part,
(open symbols) of the interfacial drag torque,
, between the solutions obtained with different mesh sizes taking as a reference the
mesh solution. Black, red, and blue symbols correspond to meshes with
,
, and
nodes, respectively. The left and right panels of
Figure 6 correspond, respectively, to the results obtained with PV-I and PV-II.
In both versions of the program, and decrease with increasing until they eventually level at values between and . However, is considerably larger in PV-I than in PV-II for all the mesh sizes analyzed. Considering , version II again shows smaller values, but the difference between version I and II is in this case much smaller than for .
This fact can be explained by the effect of the box size length scale [
26]. There are several characteristic length scales that affect the flow behavior in the bicone geometry. Following Fitzgibbon et al. [
26], we can distinguish the subphase viscous (Stokes) length scale,
, where
is the kinematic viscosity, the interfacial viscous length scale,
, the box size,
, and finally the bob radius,
. In the terms of Reference [
26], the box size is the interface radial extension,
. Then, the interfacial length scale for velocity attenuation becomes larger than the box size when
In the configuration here considered, the cross over value for
then should be
that is in very good agreement with the cross over value found numerically. Below that value, the interfacial viscous length scale, which depends on the value of
, dominates the dynamics, while above that value the box size, which is constant, is the relevant length scale. In the bulk subphase the Stokes length is
mm; hence, in this study
and, consequently, the relevant viscous length scale at the subphase is
.
The differences observed in the calculations of
and
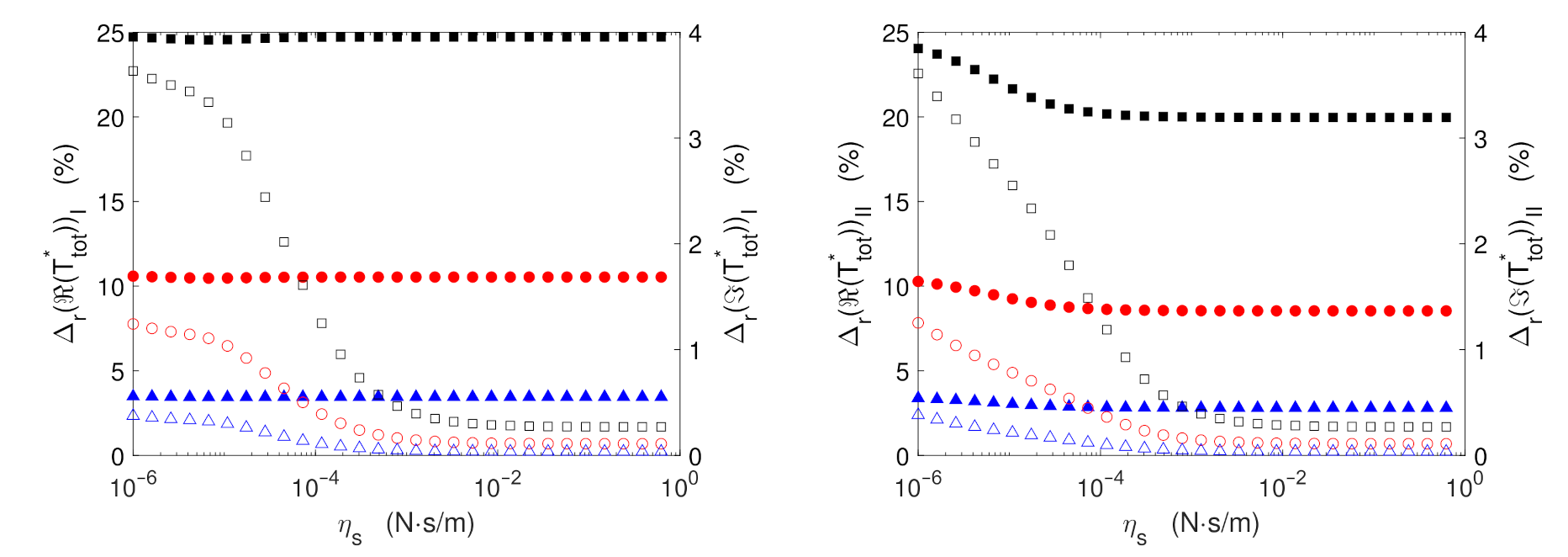
certainly have consequences on the total drag torque too. Such differences can be appreciated in
Figure 7, where we show the relative differences in the real part,
(solid symbols), and imaginary part,
(open symbols) of the total drag over the bicone + rotor assembly, between the solutions obtained with different mesh sizes taking as a reference the
mesh solution. Black, red, and blue symbols correspond to meshes with
,
, and
nodes, respectively. The left and right panels of
Figure 7 correspond, respectively, to the results obtained with versions I and II of the software.
Generally speaking, both the real and imaginary parts of the relative differences in the total torque are smaller in PV-II. Moreover, for all the mesh sizes analyzed and for both versions of the numerical approach, is considerably smaller than (see the different scale of the left and right vertical axes). Interestingly, the results for PV-I show a practically constant value of the relative differences in the real part of the total torque, , while the imaginary part shows trend changes at two different values of . Indeed, the imaginary part levels out below N·s/m and above N·s/m, while showing a steep decrease in between those values upon increasing . On the contrary, for PV-II, the real part of the total torque is flat above N·s/m and increases upon decreasing below that value, while the imaginary part shows a similar behavior although in this case the cross-over value is N·s/m.
3.3. Complex Amplitude Ratio
The differences in the drag terms must show up in the complex amplitude ratio,
, too. In
Figure 8, we show the relative differences in the modulus and argument of the complex amplitude ratio for the two program versions (left and right panels correspond to PV-I and PV-II, respectively). The dependence with the mesh size has been studied and the relative differences are referred to the results of the highest resolution mesh used (
nodes). Black symbol curves correspond to a
mesh, red symbols to a
mesh, and blue symbols to a
mesh. Filled and empty symbols correspond to relative differences in the modulus and argument, respectively.
The relative differences in the modulus and argument of the complex amplitude ratio show a more complex behavior as a function of
, because the contributions of the differences in the interfacial and subphase drags are combined together with the inertia term (see Equation (
9)) and nonlinearly transformed into modulus and argument.
In
Figure 8, the aforementioned three distinct regions appear too. In this case the cross-over values are located approximately at
and
N·s/m. Generally speaking, the values of the relative differences for PV-II are always smaller than those corresponding to PV-I, particularly regarding the argument. Moreover, the modulus relative differences shows a monotonic variation with
for PV-II, while this is not true for PV-I. Overall, the convergence of the results as a function of mesh size is quite good because the relative differences always decrease upon increasing mesh spatial resolution. Indeed, the relative differences between the best resolution mesh (
nodes) and the second best resolution mesh (
nodes) are about
in the modulus and
in the argument. Hence, if in a given application the computing time needs to be shortened, spatial meshes of
nodes or even
nodes might be safely used.
3.4. Local Strain at the Bicone Rim
It is not surprising that physical quantities that involve the response of the whole interface, such as the total torque, the complex amplitude ratio, or the complex interfacial viscosity, show small differences between the values obtained with both versions of the program. The opposite is true concerning physical variables that depend mostly on the local values at the bicone rim, such as the interfacial torque or the interfacial strain close to the bicone rim. The changes in the interfacial torque have already been illustrated in
Figure 6. Indeed, the interfacial strain close to the bicon rim is, typically, the reference variable to study whether the measurements are made in the linear regime or not.
In the mathematical representation of the problem used here, the expression for the interfacial strain at the bicone rim is
Hence
and, taking into account Equation (
6), the expression for the relationship between the strain at the bicone rim and the interfacial torque is
In
Figure 9, we show the relative differences in the modulus and argument of the complex interfacial strain at the bicone rim for the two program versions (left and right panels correspond to PV-I and PV-II, respectively). The dependence with the mesh size has been studied and the relative differences are referred to the results of the highest resolution mesh used (
nodes). Black symbol curves correspond to a
mesh, red symbols to a
mesh, and blue symbols to a
mesh. Filled and empty symbols correspond to relative differences in the modulus and argument, respectively.
On the one hand, the relative differences in the modulus of the complex interfacial strain at the bicone rim, , do not differ significantly for both program versions. On the other hand, the relative differences in the argument of the complex interfacial strain at the bicone rim, , show large differences for N·s/m. The relative differences in between program versions I and II are particularly important in the range N·s/m, where the relative differences obtained with version PV-I are higher by a factor of 10 than those corresponding to version PV-II. This variation, in favor of version PV-II, is important because the range of between and N·s/m is, precisely, where more gain should be expected from using FFBDA schemes in the bicone geometry, provided the rheometer’s resolution in torque and angular displacement is good enough.
3.5. Consistency Tests
Consistency tests consist of programming a given interfacial viscosity, solving the flow field configuration, obtaining the corresponding value of the complex amplitude ratio, and feeding the data analysis scheme with those data to check if the FFBDA scheme yields the same values that were programmed initially. The test is performed for a set of 30 values of the interfacial viscosity with logarithmic spacing in the interval N·s/m. All of the results shown here have been obtained with a high resolution mesh ( nodes).
The consistency tests performed on the iterative scheme using PV-II, with the same protocol employed in [
19], are shown in the left panels of
Figure 10. Different rows correspond to the three aforementioned representative cases. The top row corresponds to a perfectly viscous interface, so that the real part of the complex interfacial viscosity should coincide with the programmed value of
and the value of the imaginary part should be negligible, as it is shown in the top left panel of
Figure 10, where the real part of the calculated values of the interfacial viscosity is always larger by at least three orders of magnitude than the corresponding values of the imaginary part. The middle row corresponds to a viscoelastic interface with equal real and imaginary components of the perfectly viscous interface, so that both the real and imaginary parts of the complex interfacial viscosity should coincide with the programmed value of
. This is precisely what is shown in the middle left panel of
Figure 10 where the real and imaginary parts superpose nicely in a single symbol line. The bottom row corresponds to a perfectly elastic interface, so that the real part of the complex interfacial viscosity should be negligible, while the imaginary part should coincide with the programmed value of
. This happens again, as shown in the bottom left panel of
Figure 10, but in a small region slightly above
N·s/m; such a behavior appeared also in PV-I [
19].
The tests yielded very similar results to those reported for version I in [
19]. This is not strange since in the consistency tests of each version of the software, the initial flow configuration is obtained using the same version that is used to process the data afterwards. The curves in the right side panels of
Figure 10 show the number of iterations needed for convergence at each
value for PV-II. They show very similar trends to those corresponding to PV-I [
19] but the numbers of iterations needed for convergence with PV-II are slightly larger (2 to 3 more iteration steps, typically) than those corresponding to PV-I, probably a consequence of the more involved mathematical implementation of the boundary condition at the interface.
3.6. Comparative Results on Experimental Data
In the following, we illustrate the differences in the performance of both program versions on experimental data obtained in, first, thin silicone oil films of known interfacial viscosity and depth, and, second, on a pentadecanoic acid (PDA) Langmuir monolayer under an isothermal compression. All of the results shown here have been obtained with a high resolution mesh ( nodes); hence, the differences in the results obtained with program versions PV-I and PV-II have been minimized.
In
Figure 11, we show the results of processing experimental data obtained at an air/water interface covered with three different silicone oil films. Red symbols:
Pa·s,
m;
N·s/m. Black symbols:
Pa·s,
m;
N·s/m. Blue symbols:
Pa·s,
m;
N·s/m. In the left panel, circles and triangles correspond to the interfacial viscosity,
, and interfacial loss modulus,
, respectively. The values obtained with both program versions are indistinguishable in the logarithmic vertical scale chosen. Moreover, the values obtained for the interfacial viscosity agree very well with the expected value in the three cases, and the loss modulus shows a linear dependence on frequency (straight line with unity slope in the doubly logarithmic plot). Such data convergence was achieved with 5 iteration steps or less.
The corresponding relative differences in the values of the loss modulus,
, and the interfacial viscosity,
, processed with both versions of the program are shown in the right panel of
Figure 11. As expected, the relative differences coincide for the loss modulus and the interfacial viscosity exception made of the points at which both moduli take values comparable to the resolution limit of the instrument ∼
N/m [
18], that according to the data shown in the left panel corresponds, approximately, to
rad/s. Hence, the circles and triangles appear superposed in the right panel plot but at
rad/s. Not surprisingly, the relative differences are much bigger for the case of the lower value of the interfacial viscosity because the case with
N·s/m is close to the resolution limit of the instrument [
18] and, consequently, small errors in the flow field solution yield larger errors in the determination of the values of the rheological properties. Moreover, the relative differences grow with frequency, which is not surprising because the interfacial velocity profile becomes increasingly nonlinear as the frequency is increased, and the difference between the profiles determined with both versions of the program should increase accordingly.
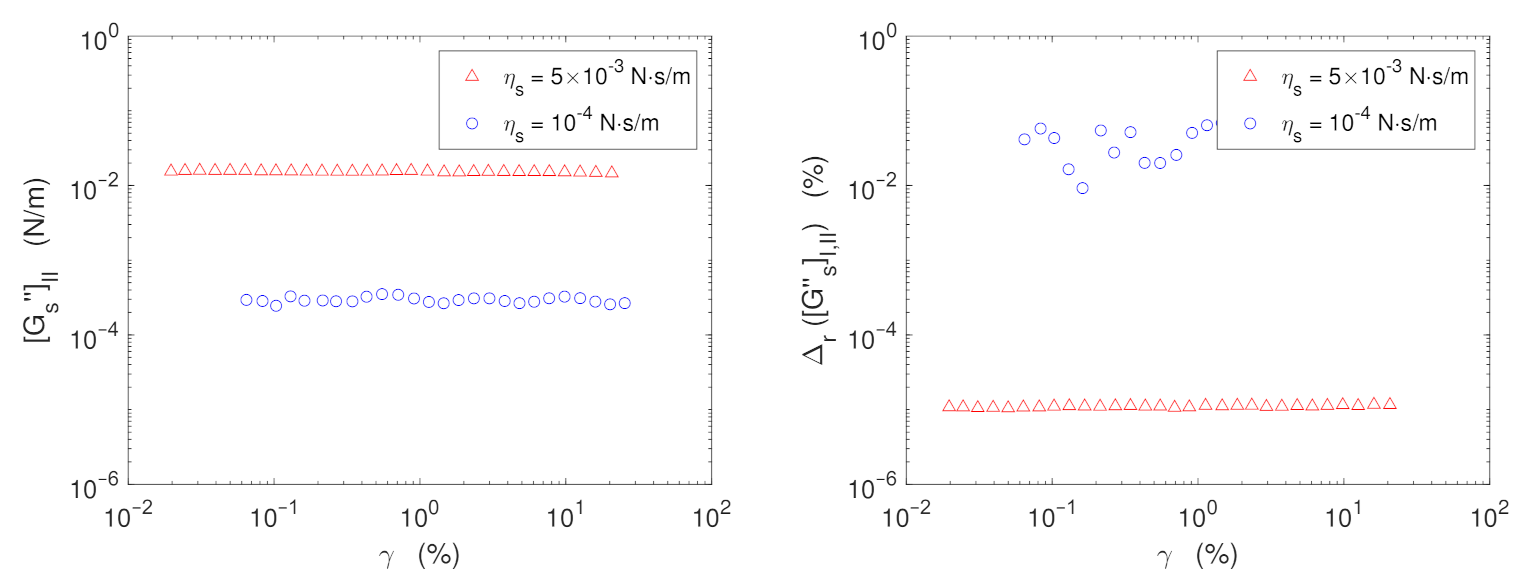
In the left panel of
Figure 12, we show plots of the values obtained for the interfacial loss modulus,
, as a function of the strain,
, for the silicone oil films with
N·s/m (red triangles; expected loss modulus
N/m) and
N·s/m (blue circles; expected loss modulus
N/m)). In these measurements the frequency was set at
Hz (
rad/s), and the oscillation amplitude was varied. The left panel shows that the measurements are well within the linear regime, and good agreement with the expected values of the loss modulus is obtained. The corresponding relative differences in the values of the loss modulus processed with both versions of the program are shown in the right panel of
Figure 12. Again, the relative differences are larger for the case of the lower value of the interfacial viscosity.
In
Figure 13, we show (red triangles) the values of
(red triangles) as a function of the interfacial pressure,
, of a pentadecanoic acid Langmuir monolayer [
19] obtained with PV-II, together with the relative difference,
, between the values obtained when analyzed with both versions of the program calculated with two different mesh resolutions, namely,
nodes (black dots) and
nodes (blue dots). From the results obtained with the high spatial resolution mesh (black dots), it is clear that the values of the difference, due to higher errors in the computations made with PV-I, are very small when the interfacial viscosity is larger than
N·s/m, roughly corresponding to interfacial pressure values above 25 mN/m, while they grow up to values about
for lower values of the interfacial viscosity. The comparison with the results obtained using the low spatial resolution mesh (blue dots) shows that the differences increase by, roughly, a tenfold factor.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












