The Influence of Kinematic Conditions and Variations in Component Positioning on the Severity of Edge Loading and Wear of Ceramic-on-Ceramic Hip Bearings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
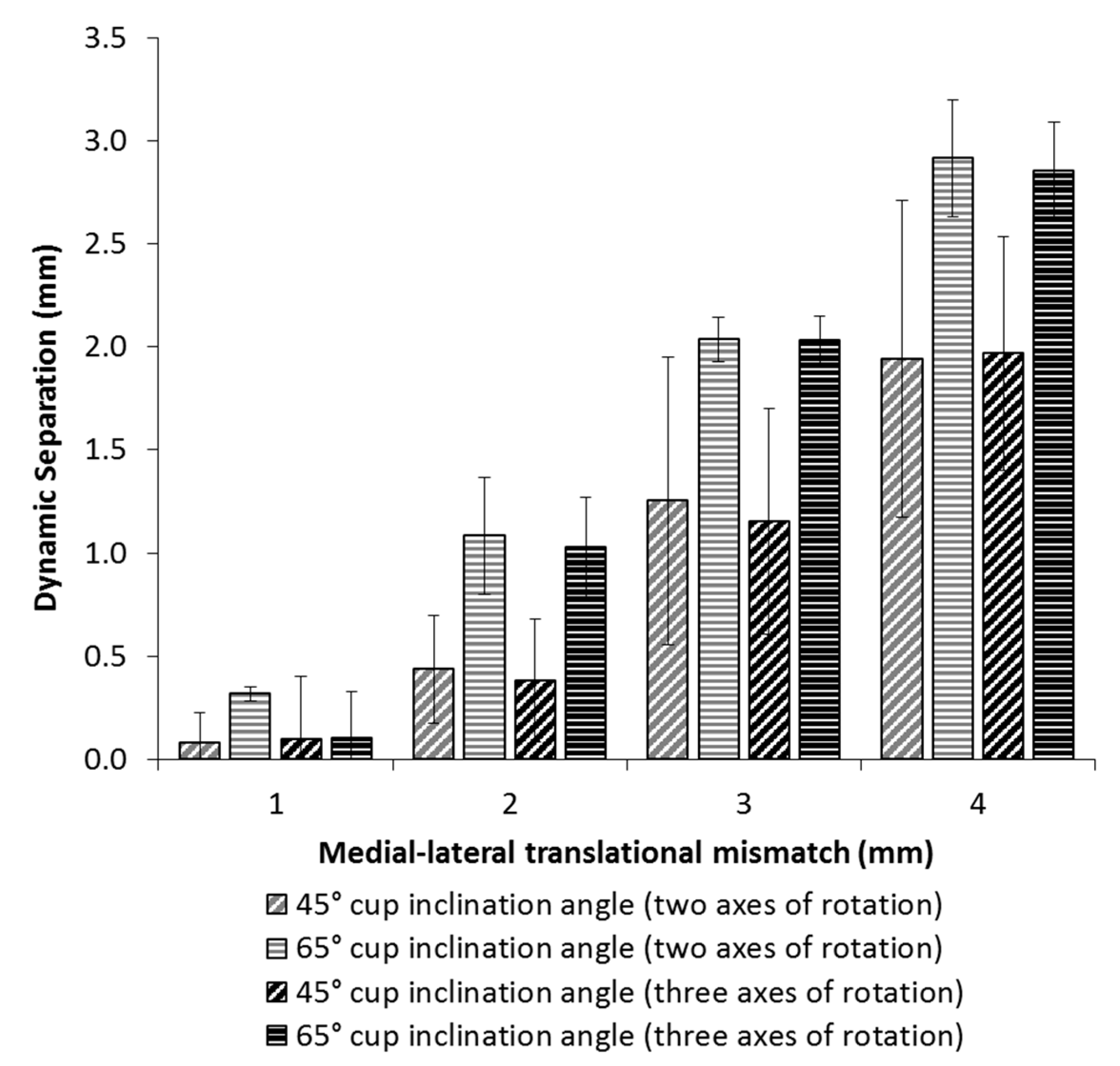
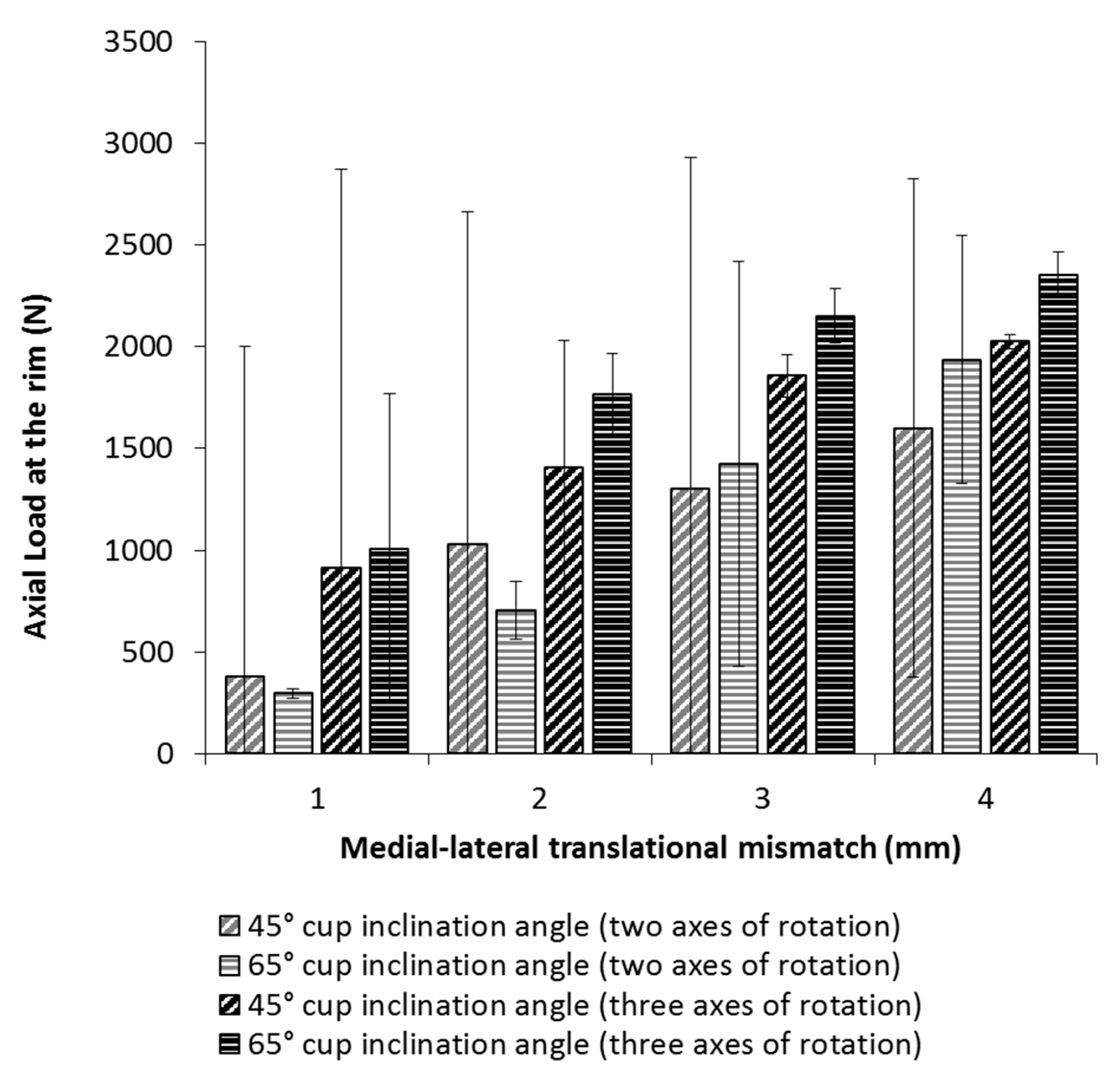
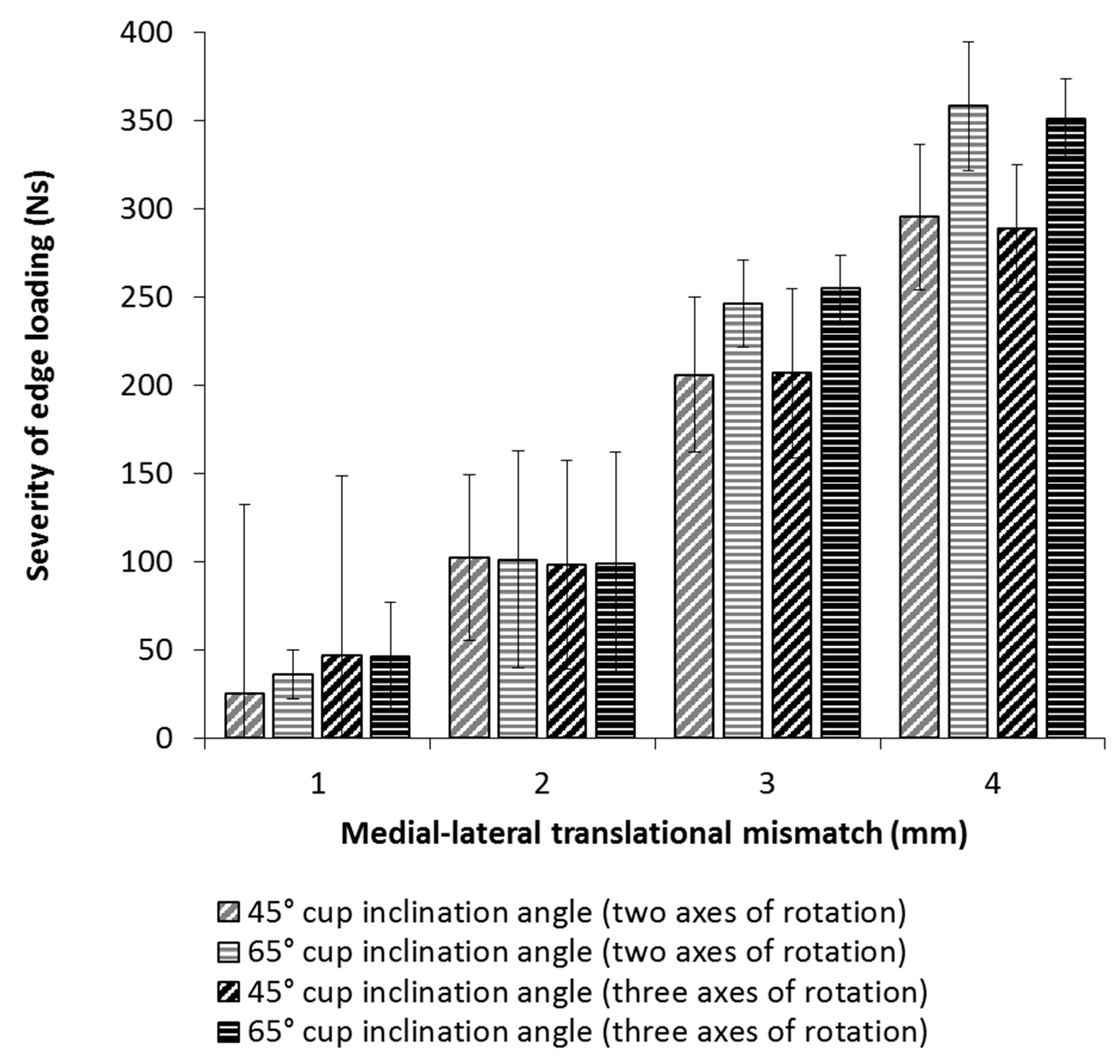
- Investigate the occurrence and severity of edge loading and dynamic separation under different levels of medial-lateral translational mismatch at standard and steep cup inclination angles (biomechanical study), under two axes of rotation simulation conditions (without abduction/adduction) and three axes of rotation simulation conditions (with abduction/adduction) with different loading profiles.
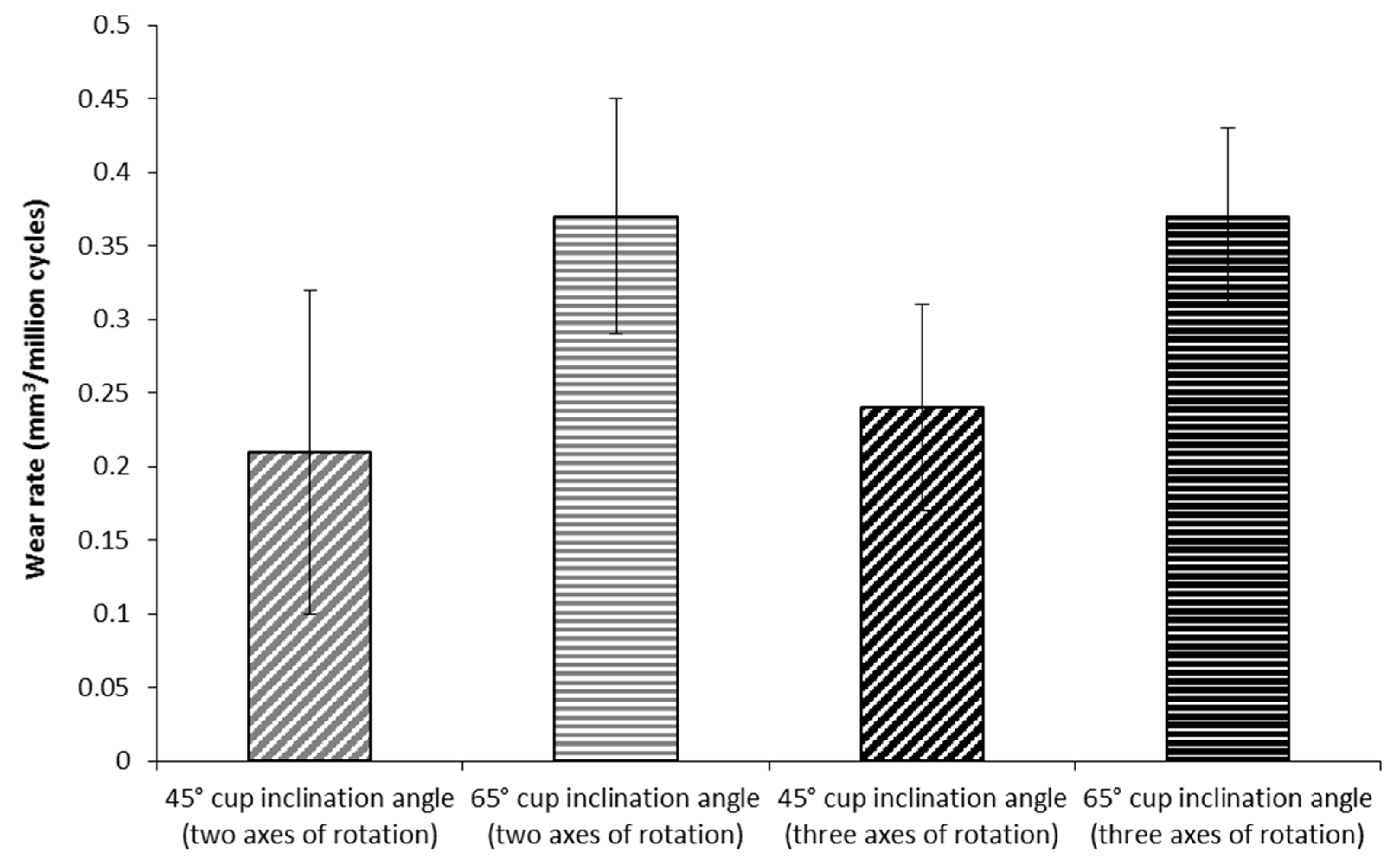
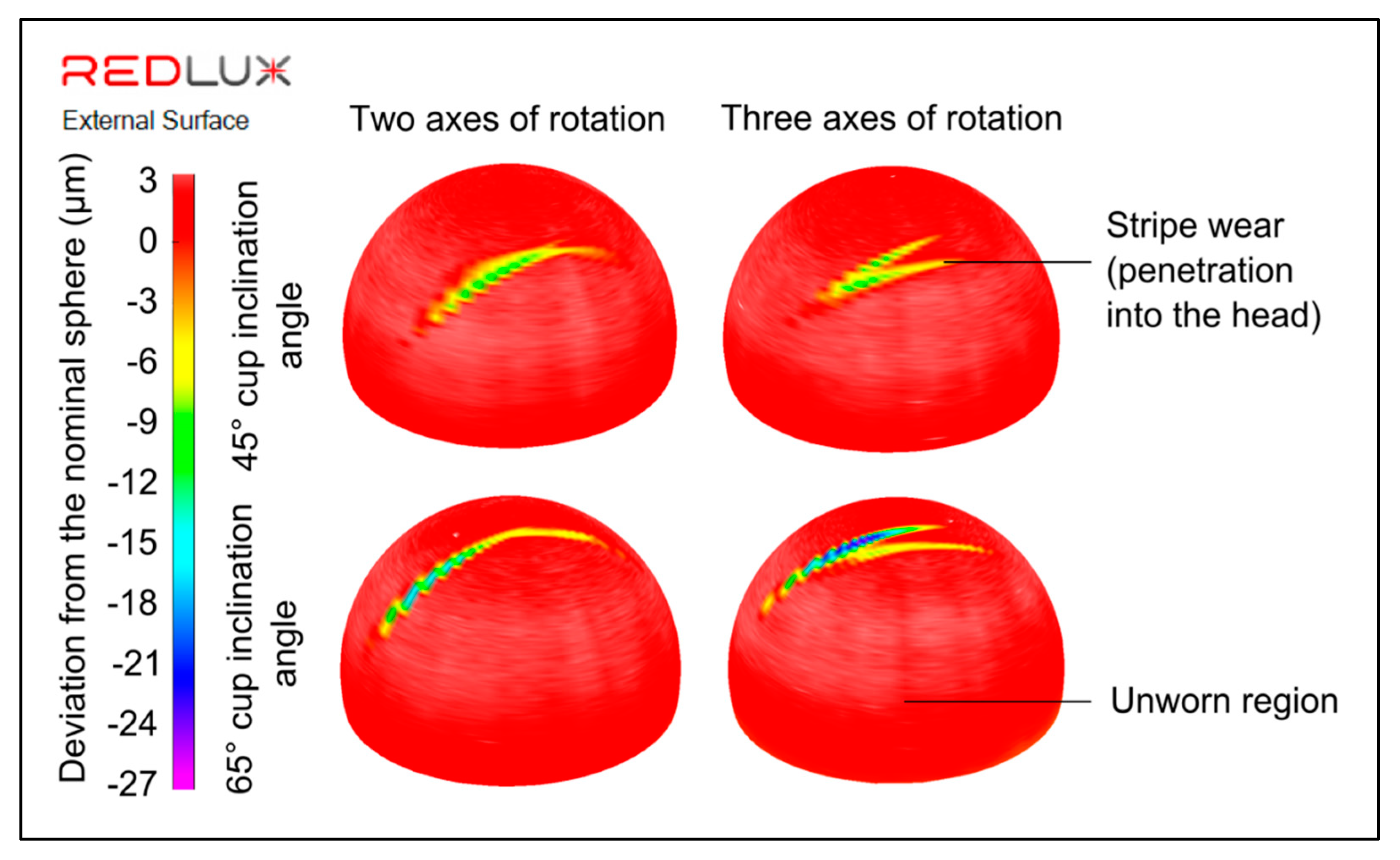
- Determine the wear of ceramic-on-ceramic bearings under edge loading conditions at standard and steep cup inclination angles (wear study), under two axes of rotation simulation conditions (without abduction/adduction) and three axes of rotation simulation conditions (with abduction/adduction and different loading profiles).
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nevelos, J.E.; Ingham, E.; Doyle, C.; Fisher, J.; Nevelos, A.B. Analysis of retrieved alumina ceramic components from Mittelmeier total hip prostheses. Biomaterials 1999, 20, 1833–1840. [Google Scholar] [CrossRef]
- Nevelos, J.E.; Ingham, E.C.; Doyle, C.; Nevelos, A.B.; Fisher, J. Wear of HIPed and non-HIPed alumina-alumina hip joints under standard and severe simulator testing conditions. Biomaterials 2001, 22, 2191–2197. [Google Scholar] [CrossRef]
- Lusty, P.J.; Tai, C.C.; Sew-Hoy, R.P.; Walter, W.L.; Walter, W.K.; Zicat, B.A. Third-generation alumina-on-alumina ceramic bearings in cementless total hip arthroplasty. J. Bone Jt. Surg. Am. 2007, 89, 2676–2683. [Google Scholar] [CrossRef] [PubMed]
- Nevelos, J.E.; Prudhommeaux, F.; Hamadouche, M.; Doyle, C.; Ingham, E.; Meunier, A.; Nevelos, A.B.; Sedel, L.; Fisher, J. Comparative analysis of two different types of alumina-alumina hip prosthesis retrieved for aseptic loosening. Bone Joint J. 2001, 83, 598–603. [Google Scholar] [CrossRef]
- Jeffers, J.R.T.; Walter, W.L. Ceramic-on-ceramic bearings in hip arthroplasty: State of the art and the future. J. Bone Jt. Surg. Br. Vol. 2012, 94, 735–745. [Google Scholar] [CrossRef] [PubMed]
- Mak, M.; Jin, Z.; Fisher, J.; Stewart, T.D. Influence of Acetabular Cup Rim Design on the Contact Stress During Edge Loading in Ceramic-on-Ceramic Hip Prostheses. J. Arthroplast. 2011, 26, 131–136. [Google Scholar] [CrossRef] [PubMed]
- Sariali, E.; Stewart, T.; Jin, Z.; Fisher, J. Effect of cup abduction angle and head lateral microseparation on contact stresses in ceramic-on-ceramic total hip arthroplasty. J. Biomech. 2012, 45, 390–393. [Google Scholar] [CrossRef]
- Nevelos, J.E.; Ingham, E.; Doyle, C.; Nevelos, A.B.; Fisher, J. The influence of acetabular cup angle on the wear of ‘BIOLOX Forte’ alumina ceramic bearing couples in a hip joint simulator. J. Mater. Sci. Mater. Med. 2001, 12, 141–144. [Google Scholar] [CrossRef]
- Hatton, A.; Nevelos, J.E.; Nevelos, A.A.; Banks, R.E.; Fisher, J.; Ingham, E. Alumina–alumina artificial hip joints. Part I: A histological analysis and characterisation of wear debris by laser capture microdissection of tissues retrieved at revision. Biomaterials 2002, 23, 3429–3440. [Google Scholar] [CrossRef]
- Nevelos, J.; Ingham, E.; Doyle, C.; Streicher, R.; Nevelos, A.; Walter, W.; Fisher, J. Microseparation of the centers of alumina-alumina artificial hip joints during simulator testing produces clinically relevant wear rates and patterns. J. Arthroplasty 2000, 15, 793–795. [Google Scholar] [CrossRef]
- Tipper, J.L.; Hatton, A.; Nevelos, J.E.; Ingham, E.; Doyle, C.; Streicher, R.; Nevelos, A.B.; Fisher, J. Alumina–alumina artificial hip joints. Part II: Characterisation of the wear debris from in vitro hip joint simulations. Biomaterials 2002, 23, 3441–3448. [Google Scholar] [CrossRef]
- Komistek, R.D.; Dennis, D.A.; Ochoa, J.A.; Haas, B.D.; Hammill, C. In Vivo Comparison of Hip Separation After Metal-on-Metal or Metal-on-Polyethylene Total Hip Arthroplasty. J. Bone Jt. Surg. Am. 2002, 84, 1836–1841. [Google Scholar] [CrossRef] [PubMed]
- Fisher, J.; Al-Hajjar, M.; Williams, S.; Jennings, L.M.; Ingham, E. In Vitro Measurement of Wear in Joint Replacements: A Stratified Approach for Enhanced Reliability ‘SAFER’ Pre-Clinical Simulation Testing. Semin. Arthroplasty 2012, 4, 286–288. [Google Scholar] [CrossRef]
- Jennings, L.M.; Al-Hajjar, M.; Brockett, C.L.; Williams, S.; Tipper, J.L.; Ingham, E.; Fisher, J. (iv) Enhancing the safety and reliability of joint replacement implants. Orthop. Trauma 2012, 26, 246–252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fisher, J. Bioengineering reasons for the failure of metal-on-metal hip prostheses: An engineer’s perspective. J. Bone Jt. Surg. Br. Vol. 2011, 93, 1001–1004. [Google Scholar] [CrossRef] [PubMed]
- Williams, S.; Jalali-Vahid, D.; Brockett, C.; Jin, Z.; Stone, M.H.; Ingham, E.; Fisher, J. Effect of swing phase load on metal-on-metal hip lubrication, friction and wear. J. Biomech. 2006, 12, 2274–2281. [Google Scholar] [CrossRef] [PubMed]
- Brockett, C.; Williams, S.; Jin, Z.; Isaac, G.; Fisher, J. Friction of total hip replacements with different bearings and loading conditions. J. Biomed. Mater. Res. Part B Appl. Biomater. 2007, 81, 508–515. [Google Scholar] [CrossRef] [PubMed]
- Fisher, J.; Bell, J.; Barbour, P.S.M.; Tipper, J.L.; Matthews, J.B.; Besong, A.A.; Stone, M.H.; Ingham, E. A novel method for the prediction of functional biological activity of polyethylene wear debris. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2001, 215, 127–132. [Google Scholar] [CrossRef]
- Barbour, P.S.M.; Stone, M.H.; Fisher, J. A hip joint simulator study using new and physiologically scratched femoral heads with ultra-high molecular weight polyethylene acetabular cups. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2000, 214, 569–576. [Google Scholar] [CrossRef]
- Lancaster-Jones, O.O.; Williams, S.; Jennings, L.M.; Thompson, J.; Isaac, G.H.; Fisher, J.; Al-Hajjar, M. An in vitro simulation model to assess the severity of edge loading and wear, due to variations in component positioning in hip joint replacements. J. Biomed. Mater. Res. Part B 2018, 106, 1897–1906. [Google Scholar] [CrossRef]
- Affatato, S.; Leardini, W.; Zavalloni, M. Hip Joint Simulators: State of the Art. In Bioceramics and Alternative Bearings in Joint Arthroplasty; Benazzo, F., Falez, F., Dietrich, M., Eds.; Steinkopff: Heidelberg, Germany, 2006; pp. 171–180. [Google Scholar]
- Affatato, S.; Spinelli, M.; Zavalloni, M.; Mazzega-Fabbro, C.; Viceconti, M. Tribology and total hip joint replacement: Current concepts in mechanical simulation. Med. Eng. Phys. 2008, 30, 1305–1317. [Google Scholar] [CrossRef] [PubMed]
- Calonius, O.; Saikko, V. Slide track analysis of eight contemporary hip simulator designs. J. Biomech. 2002, 35, 1439–1450. [Google Scholar] [CrossRef]
- Barbour, P.S.M.; Stone, M.H.; Fisher, J. A hip joint simulator study using simplified loading and motion cycles generating physiological wear paths and rates. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 1999, 213, 455–467. [Google Scholar] [CrossRef] [PubMed]
- ISO 14242-1:2014. Implants for Surgery—Wear of Total Hip-Joint Prostheses—Part 1: Loading and Displacement Parameters for Wear-Testing Machines and Corresponding Environmental Conditions for Test; ISO: Geneva, Switzerland, 2014. [Google Scholar]
- Ali, M.; Al-Hajjar, M.; Partridge, S.; Williams, S.; Fisher, J.; Jennings, L.M. Influence of hip joint simulator design and mechanics on the wear and creep of metal-on-polyethylene bearings. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2016, 230, 389–397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Goldsmith, A.A.J.; Dowson, D. A multi-station hip joint simulator study of the performance of 22 mm diameter zirconia-ultra-high molecular weight polyethylene total replacement hip joints. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 1999, 213, 77–90. [Google Scholar] [CrossRef] [PubMed]
- Williams, S.; Leslie, I.; Isaac, G.; Jin, Z.; Ingham, E.; Fisher, J. Tribology and wear of metal-on-metal hip prostheses: Influence of cup angle and head position. J. Bone Jt. Surg. Am. Vol. 2008, 90, 111–117. [Google Scholar] [CrossRef] [PubMed]
- Ali, M.; Jennings, L.M. The Influence of Kinematic Conditions and Variations in Component Positioning on the Severity of Edge Loading and Wear of Ceramic-on-Ceramic Hip Bearings; University of Leeds: Leeds, UK, 2019. [Google Scholar]
- Pecharromán, C.; Bartolomé, J.F.; Requena, J.; Moya, J.S.; Deville, S.; Chevalier, J.; Fantozzi, G.; Torrecillas, R. Percolative Mechanism of Aging in Zirconia-Containing Ceramics for Medical Applications. Adv. Mater. 2003, 15, 507–511. [Google Scholar] [CrossRef] [Green Version]
- Al-Hajjar, M.; Gremillard, L.; Begand, S.; Oberbach, T.; Hans, K.; Delfosse, D.; Chevalier, J.; Jennings, L.M. Combined Wear and Ageing of Ceramic-on-Ceramic Bearings in Total Hip Replacement under Edge Loading Conditions. J. Mech. Behav. Biomed. Mater. 2019, 98, 40–47. [Google Scholar] [CrossRef]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, M.; Al-Hajjar, M.; Fisher, J.; Jennings, L.M. The Influence of Kinematic Conditions and Variations in Component Positioning on the Severity of Edge Loading and Wear of Ceramic-on-Ceramic Hip Bearings. Ceramics 2019, 2, 488-501. https://0-doi-org.brum.beds.ac.uk/10.3390/ceramics2030037
Ali M, Al-Hajjar M, Fisher J, Jennings LM. The Influence of Kinematic Conditions and Variations in Component Positioning on the Severity of Edge Loading and Wear of Ceramic-on-Ceramic Hip Bearings. Ceramics. 2019; 2(3):488-501. https://0-doi-org.brum.beds.ac.uk/10.3390/ceramics2030037
Chicago/Turabian StyleAli, Murat, Mazen Al-Hajjar, John Fisher, and Louise M. Jennings. 2019. "The Influence of Kinematic Conditions and Variations in Component Positioning on the Severity of Edge Loading and Wear of Ceramic-on-Ceramic Hip Bearings" Ceramics 2, no. 3: 488-501. https://0-doi-org.brum.beds.ac.uk/10.3390/ceramics2030037