Study on an Energy-Harvesting Magnetorheological Damper System in Parallel Configuration for Lightweight Battery-Operated Automobiles



Abstract
:1. Introduction
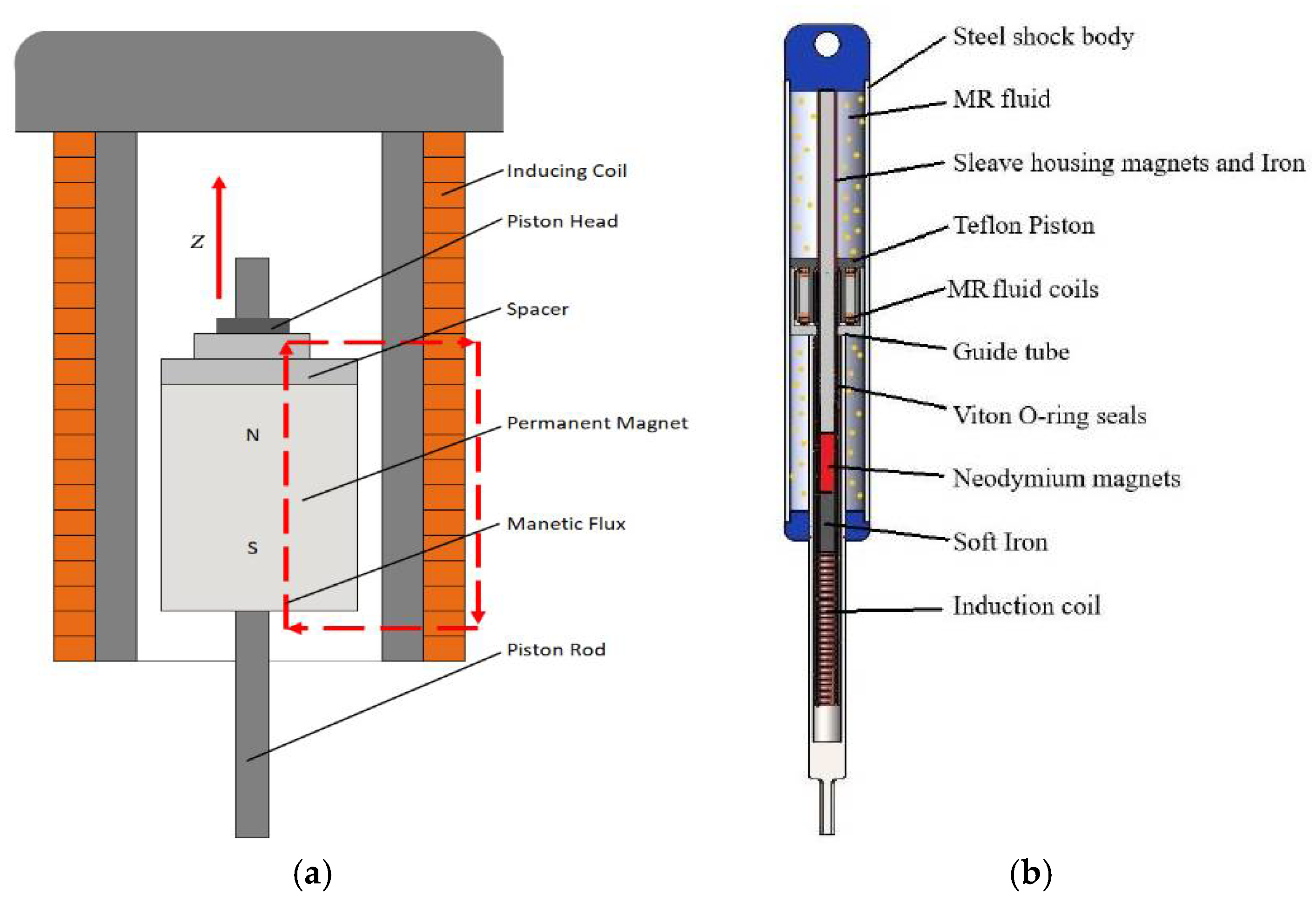
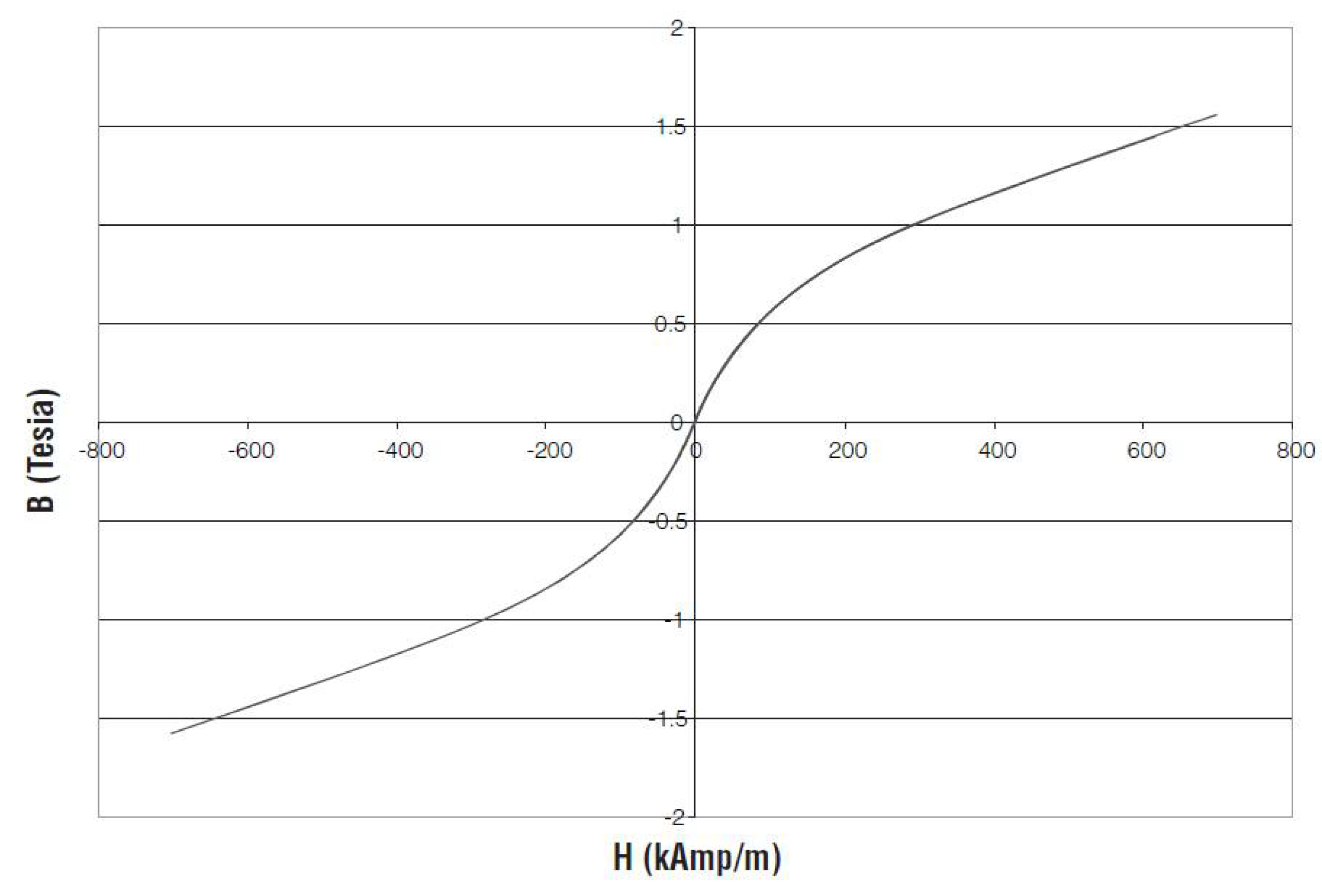
2. Analytical Modeling of Energy-Harvesting Module
3. MATLAB/Simulink Model
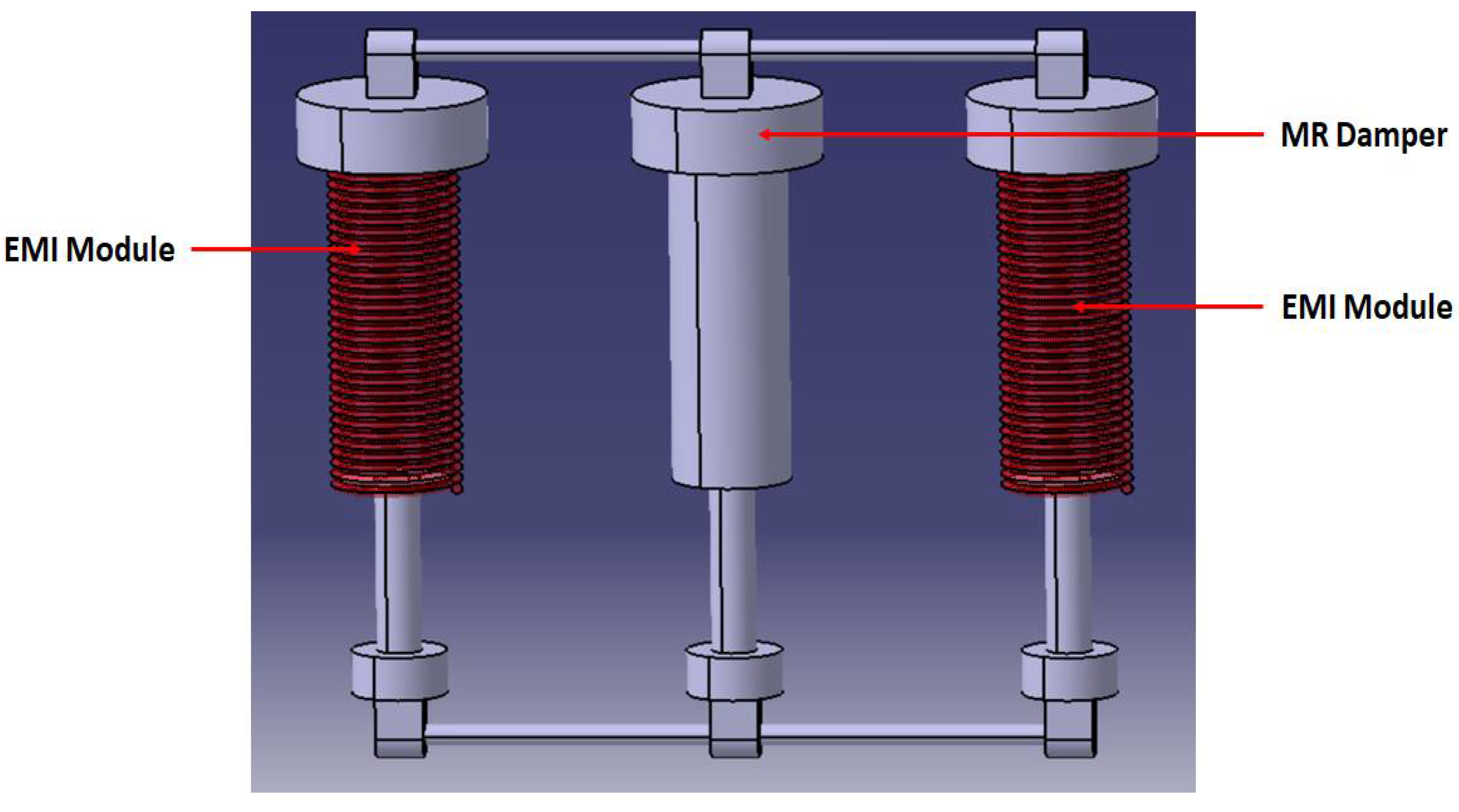
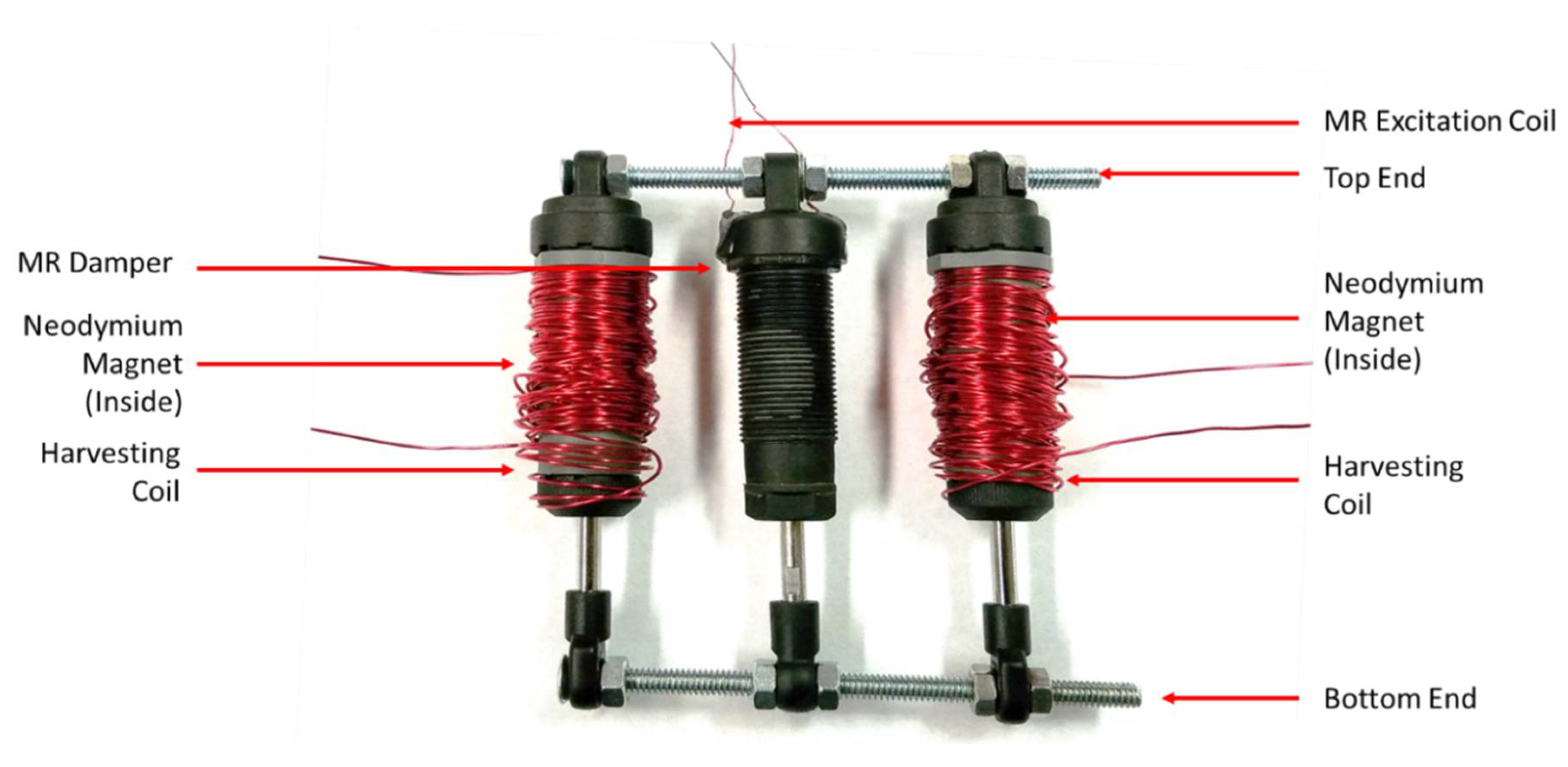
4. Energy-Harvesting Magneto-Rheological Suspension—Prototype Design
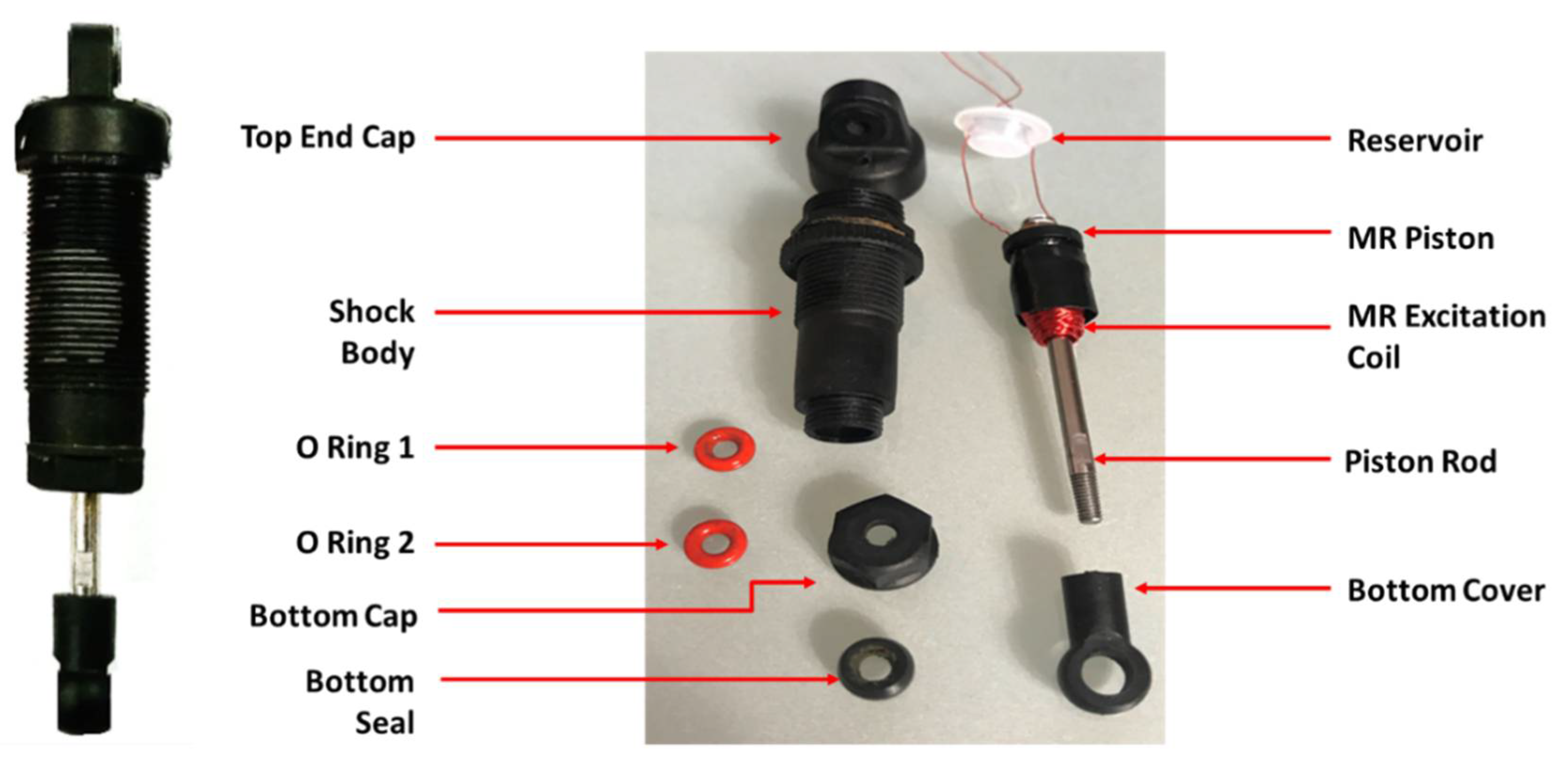
5. Fabrication of MR Damper
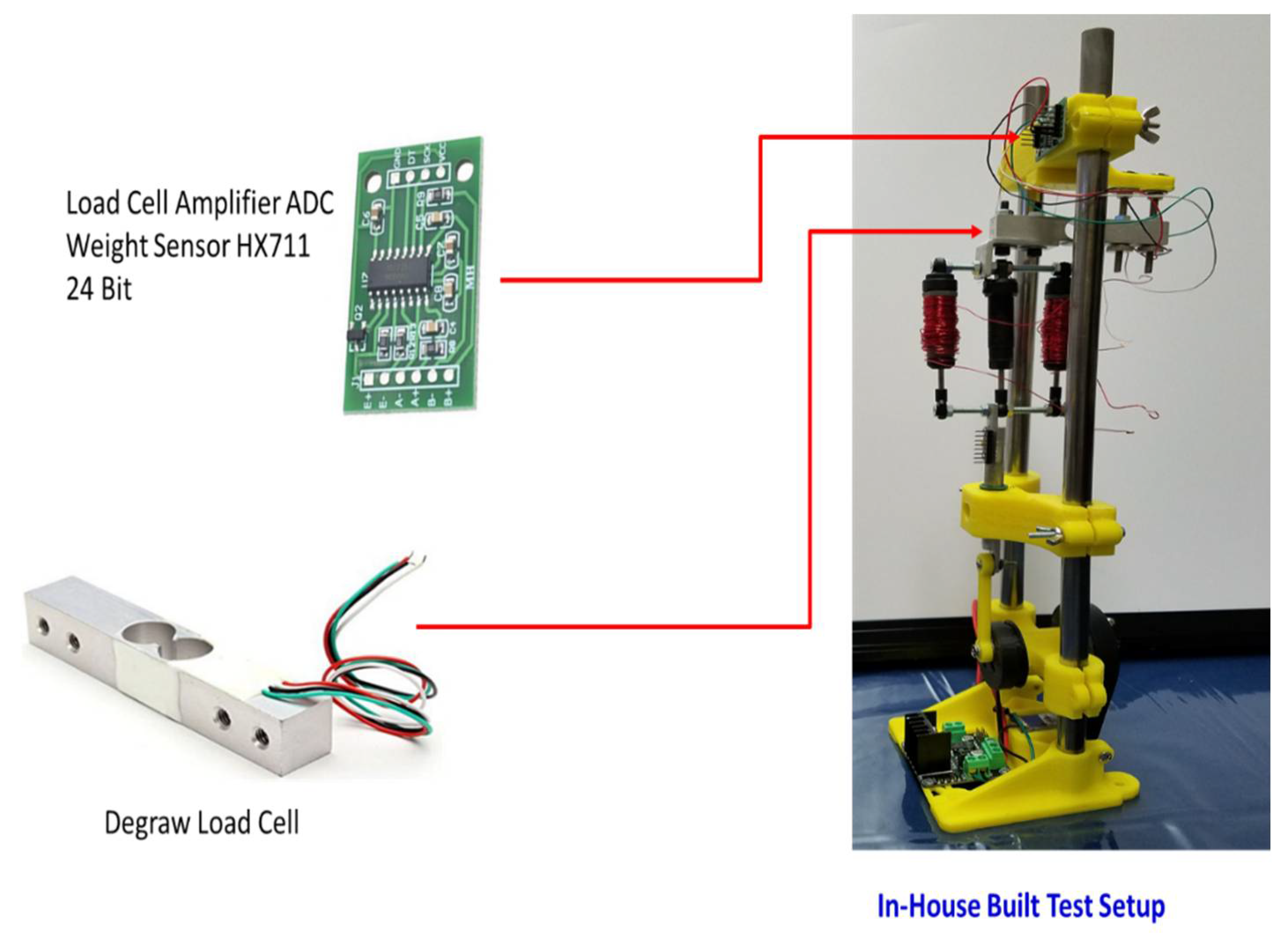
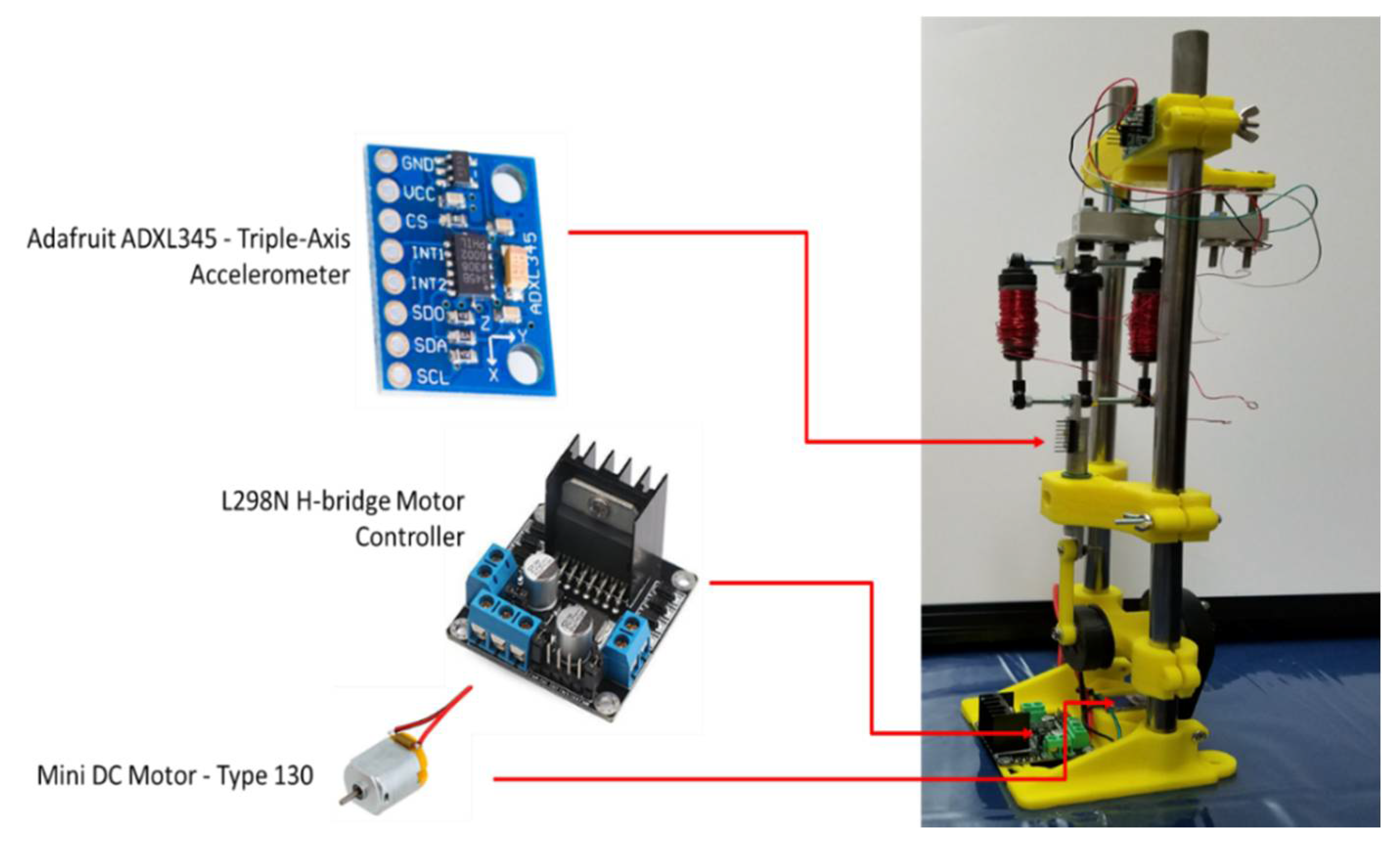
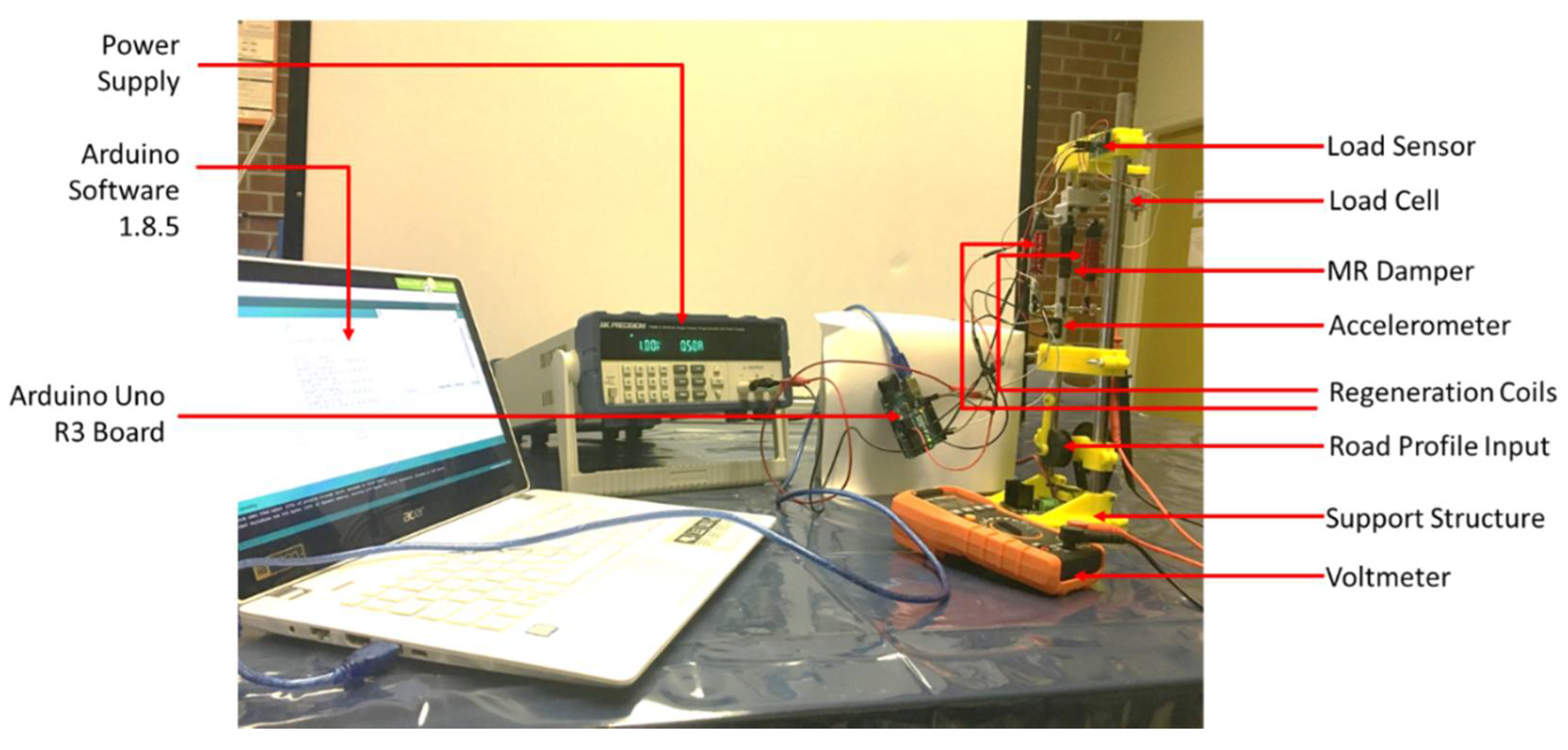
6. Testing of Proposed System
7. Results
8. Conclusions
- In this study, an EHMR suspension system consisting of an MR damper and an energy-harvesting module in the parallel configuration is successfully designed and fabricated.
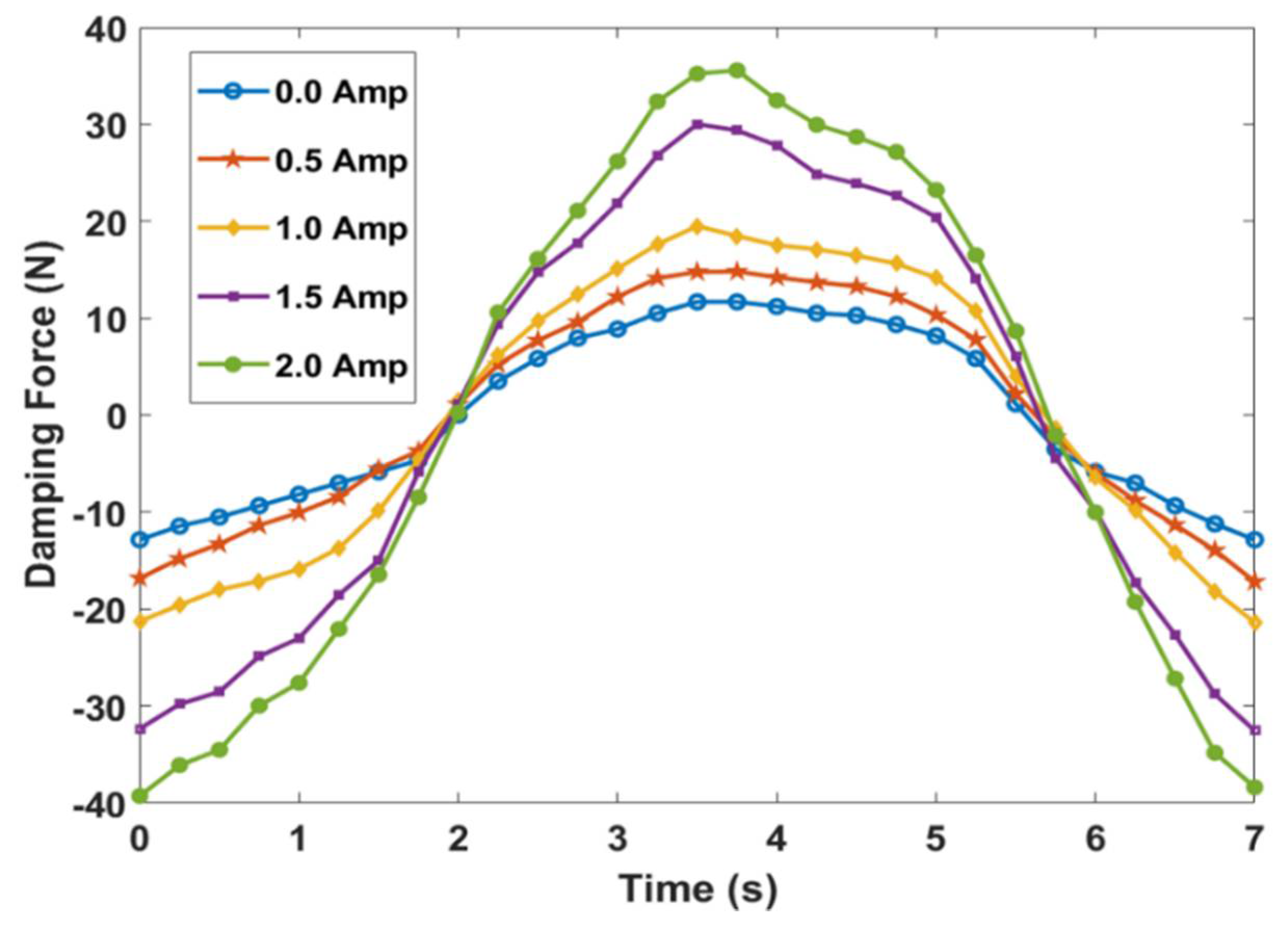
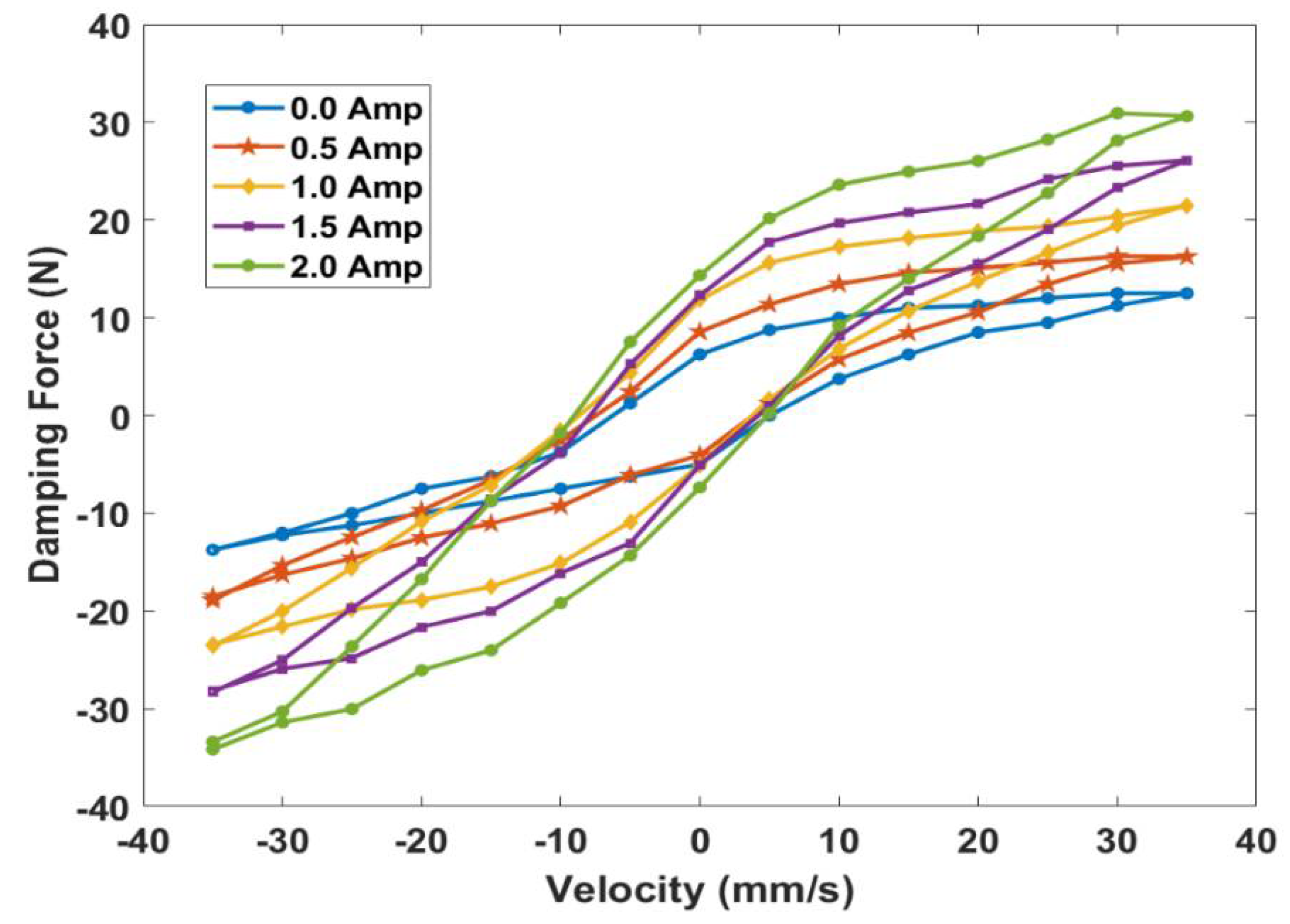
- The parametric study suggested that the parallel configuration of the energy-harvesting module with an MRD does not adversely affect the MR system performance.
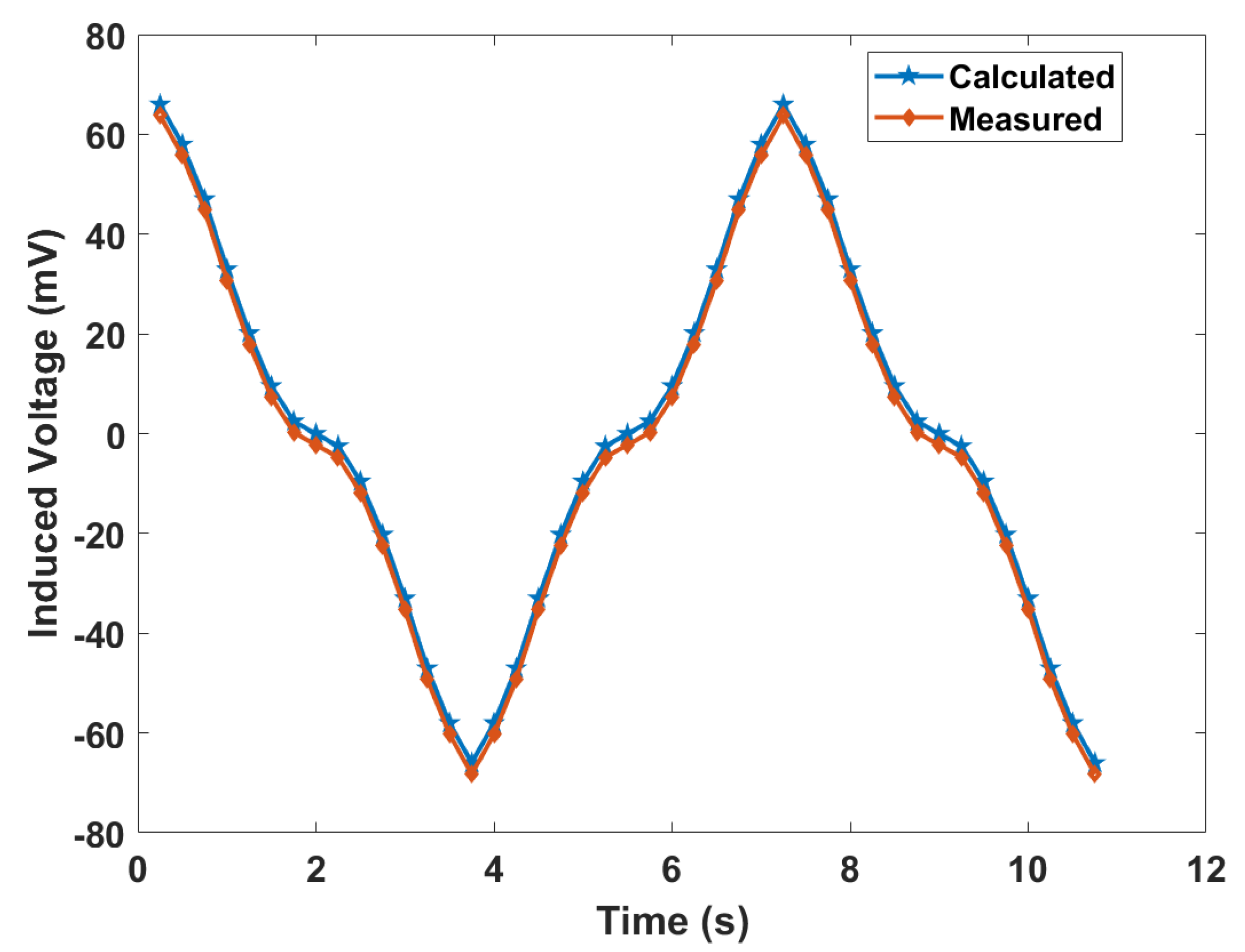
- The analytical model is validated, and the model can predict the induced voltage from the energy-harvesting module within an accuracy of 3.5% error.
- The energy-harvesting capability of the proposed system can be further improved by providing additional sets of magnets and increased coil windings.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zapateiro, M.; Pozo, F.; Karimi, H.R.; Luo, N. Semiactive control methodologies for suspension control with magnetorheological dampers. IEEE-ASME T. Mech. 2012, 17, 370–380. [Google Scholar] [CrossRef] [Green Version]
- Asadi, E.; Ribeiro, R.; Khamesee, M.B.; Khajepour, A. Analysis, Prototyping, and Experimental Characterization of an Adaptive Hybrid Electromagnetic Damper for Automotive Suspension Systems. IEEE T. Veh. Technol. 2017, 66, 3703–3713. [Google Scholar] [CrossRef]
- Taghirad, H.D.; Esmailzadeh, E. Automobile passenger comfort assured through LQG/LQR active suspension. J. Vib. Control 1998, 4, 603–618. [Google Scholar] [CrossRef]
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, M.F. Feasibility study of an electromagnetic shock absorber with position sensing capability. In Proceedings of the 34th Annual Conference of IEEE Industrial Electronics (IECON 2008), Orlando, FL, USA, 10–13 November 2008; pp. 2988–2991. [Google Scholar]
- Qazi, A.J.; de Silva, C.W.; Khan, A.; Khan, M.T. Performance analysis of a semiactive suspension system with particle swarm optimization and fuzzy logic control. Sci. World J. 2014, 2014, 174102. [Google Scholar] [CrossRef] [PubMed]
- Symans, M.D.; Constantinou, M.C. Semi-active control systems for seismic protection of structures: A state-of-the-art review. Eng. Struct. 1999, 21, 469–487. [Google Scholar] [CrossRef]
- Chen, C.; Liao, W.-H. A self-sensing magnetorheological damper with power generation. Smart Mater. Struct. 2012, 21, 025014. [Google Scholar] [CrossRef]
- Çeşmeci, Ş.; Engin, T. Modeling and testing of a field-controllable magnetorheological fluid damper. Int. J. Mech. Sci. 2010, 52, 1036–1046. [Google Scholar] [CrossRef]
- Shen, Y.; Golnaraghi, M.; Heppler, G. Analytical and experimental study of the response of a suspension system with a magnetorheological damper. J. Intel. Mat. Syst. Str. 2005, 16, 135–147. [Google Scholar] [CrossRef]
- Bucinskas, V.; Mitrouchev, P.; Sutinys, E.; Sesok, N.; Iljin, I.; Morkvenaite-Vilkonciene, I. Evaluation of comfort level and harvested energy in the vehicle using controlled damping. Energies 2017, 10, 1742. [Google Scholar] [CrossRef] [Green Version]
- Sarbaev, V.; Garmash, Y.V.; Blinnikova, L. Recuperative shock absorber. Russ. Eng. Res. 2016, 36, 920–922. [Google Scholar] [CrossRef]
- Sapiński, B. Energy-harvesting linear MR damper: Prototyping and testing. Smart Mater. Struct. 2014, 23, 035021. [Google Scholar] [CrossRef]
- Hadjiloucas, S.; Walker, G.C.; Bowen, J.W.; Karatzas, L. Performance limitations of piezoelectric and force feedback electrostatic transducers in different applications. J. Phys.-Conf. Ser. 2009, 178, 012036. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, Z.; Spencer, B.F. Self-powered and sensing control system based on MR damper: Presentation and application. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2009, San Diego, CA, USA, 8–12 March 2009; p. 729240. [Google Scholar]
- Eriksson, J.; Piroti, S. Review of Methods for Energy Harvesting from a Vehicle Suspension System; KTH Royal Institute of Technology: Stockholm, Sweden, 2016. [Google Scholar]
- Hu, G.; Lu, Y.; Sun, S.; Li, W. Performance analysis of a magnetorheological damper with energy harvesting ability. Shock Vib. 2016, 2016, 2959763. [Google Scholar] [CrossRef] [Green Version]
- Ahamed, R.; Rashid, M.; Ferdaus, M.; Yusuf, H.B. Modelling and performance evaluation of energy harvesting linear magnetorheological (MR) damper. J. Low Freq. Noise Vib. Active Control 2017, 36, 177–192. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.-W.; Jung, H.-J.; Lee, I.-W. Smart passive system based on magnetorheological damper. Smart Mater. Struct. 2005, 14, 707. [Google Scholar] [CrossRef]
- Choi, Y.-T.; Wereley, N.M. Self-powered magnetorheological dampers. J. Vib. Acoust. 2009, 131, 044501. [Google Scholar] [CrossRef]
- Sapiński, B. Vibration power generator for a linear MR damper. Smart Mater. Struct. 2010, 19, 105012. [Google Scholar] [CrossRef]
- Ghosh, A. Scaling laws. In Mechanics Over Micro and Nano Scales; Springer: New York, USA, 2011; pp. 61–94. [Google Scholar]
- Lord MRF-132DG Magneto-Rheological Fluid. Available online: http://www.lordmrstore.com/lord-mr-products/mrf-132dg-magneto-rheological-fluid (accessed on 14 May 2020).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Symbol |
|---|---|
| Magnetic flux of air gap without considering the leakage | |
| Flux density of the magnet | |
| Magnet thickness | |
| Relative magnetic permeability | |
| Magnetic field intensity of the magnet | |
| Length of the air gap between piston rod and permanent magnet array | |
| Surface area of cylindrical air gap | |
| Cross-sectional area of the magnet | |
| Diameter of the shaft |
| Energy-Harvesting Coil | Insulated Copper | 24 American Wire Gauge (AWG) |
| Magnet material | Neodymium | N48 |
| Thickness of magnet | 25.4 | mm |
| Width of magnet | 12.7 | mm |
| Generation coil winding (number of turns) | 72 | |
| Generation coil winding resistance | 0.572 | |
| Relative magnetic permeability | ||
| Length of the air gap | 2 | mm |
| Diameter of the shaft | 3 | mm |
| Spacer thickness | 1 | mm |
| Component | Material |
|---|---|
| MR Piston | Nylon |
| MR Excitation Coil | Insulated Copper (32AWG) |
| Shock Body | Acrylonitrile Butadiene Styrene (ABS) |
| Piston Rod | Steel 1020 |
| Bottom Seal | Rubber |
| MRF Fluid | Lord 132 DG |
| Parameter | Value | Unit |
|---|---|---|
| Diameter of the piston | 10 | mm |
| Length of the piston | 2 | mm |
| Inside diameter of the cylinder | 12 | mm |
| Outside diameter of the cylinder | 15 | mm |
| Diameter of piston rod | 3 | mm |
| Length of damper in extended position | 78.75 | mm |
| Length of damper in compressed position | 70 | mm |
| Stroke length | 8.75 | mm |
| MR coil winding (number of turns) | 970 | - |
| MR coil winding resistance | 5 |
| Appearance | Dark Grey |
|---|---|
| Viscosity @ | 0.112 ± 0.02 |
| Density, | 2.95–3.15 (24.6–26.3) |
| Solid content by weight, % | 80.98 |
| Flash point, () | >150 (>302) |
| Operating temperature, () | −40 to +130 (−40 to +266) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kabariya, U.; James, S. Study on an Energy-Harvesting Magnetorheological Damper System in Parallel Configuration for Lightweight Battery-Operated Automobiles. Vibration 2020, 3, 162-173. https://0-doi-org.brum.beds.ac.uk/10.3390/vibration3030013
Kabariya U, James S. Study on an Energy-Harvesting Magnetorheological Damper System in Parallel Configuration for Lightweight Battery-Operated Automobiles. Vibration. 2020; 3(3):162-173. https://0-doi-org.brum.beds.ac.uk/10.3390/vibration3030013
Chicago/Turabian StyleKabariya, Urvesh, and Sagil James. 2020. "Study on an Energy-Harvesting Magnetorheological Damper System in Parallel Configuration for Lightweight Battery-Operated Automobiles" Vibration 3, no. 3: 162-173. https://0-doi-org.brum.beds.ac.uk/10.3390/vibration3030013