3.1. Ant Colony Optimization
The ACO, part of the ACO-SA algorithm, is based on the algorithm proposed by the authors for the multi-depot vehicle routing problem (MDVRP). This section adapts this algorithm to the DTSP; the MDVRP version can be found in [
46]. The application of this algorithm to the DTSP instead of the MDVRP allows some simplifications which follow from using only a single colony of ants instead of multiple colonies, or missing constraints concerning the maximum length and/or capacity of vehicles.
The key parameters of the ACO algorithm are in
Table 1 along with a brief discussion. More information about their function and place in the algorithm can be found in the text below.
Table 2 records all variables and symbols used in this section.
Algorithm 1 presents the ACO algorithm in pseudocode. For each iteration, including iteration zero (), the algorithm repeats the same process in a loop (lines 3 to 34); the result of each loop is cost (line 33) and route . (line 34) representing the -th TSP solution. The first key step in each loop is the initialization of the pheromone matrix (line 6). The details of this process are mentioned later in this section (see Algorithm 2). Note that in the zero iteration (), route , which is undefined, is used as an input of the initialization function. It does not affect the functionality, as Algorithm 2 does not work with this parameter when .
The process of finding a solution for the -th TSP proceeds in a number of generations (lines 7 to 32). In each generation, heuristic information obtained in previous generations in the form of the pheromone matrix is used to generate a set of solutions; each solution (route ) is found for each ant in the colony () independently of one another (lines 9 to 25).
A solution for each ant is created based on the gradual selection of vertices from set
and their insertion into route
in a loop (lines 14 to 20). For this, set
is established, registering all vertices still missing in route
(line 13). The loop ends when this set is empty, i.e., there are no more vertices in set
, which means that route
contains all vertices from set
. Each vertex
is a candidate for insertion into route
; the probability of this insertion
(lines 15 to 16) is calculated according to Formula (4). The next vertex in the route is selected based on these probabilities (line 17) using a simple roulette wheel principle (see Algorithm 3 later in this section):
where
is the distance between the last vertex inserted into route
(which is vertex
) and candidate vertex
(
),
is a pheromone trail between the last vertex inserted into route and vertex
,
is the distance between the last vertex inserted into route and vertex
(
),
is a pheromone trail between the last vertex inserted into route and
,
is the coefficient controlling the influence of the distance between vertices on the probability, and
is the coefficient controlling the influence of the pheromones on the probability. As can be seen, the distance is inversed, i.e., the bigger the distance, the lower the probability.
The best route of all ants (.), i.e., the one with the lowest cost , is stored as route (lines 23 to 25). If the best solution found in a generation is better than the best solution found so far in previous generations, this solution is saved as route with cost (lines 26 to 28).
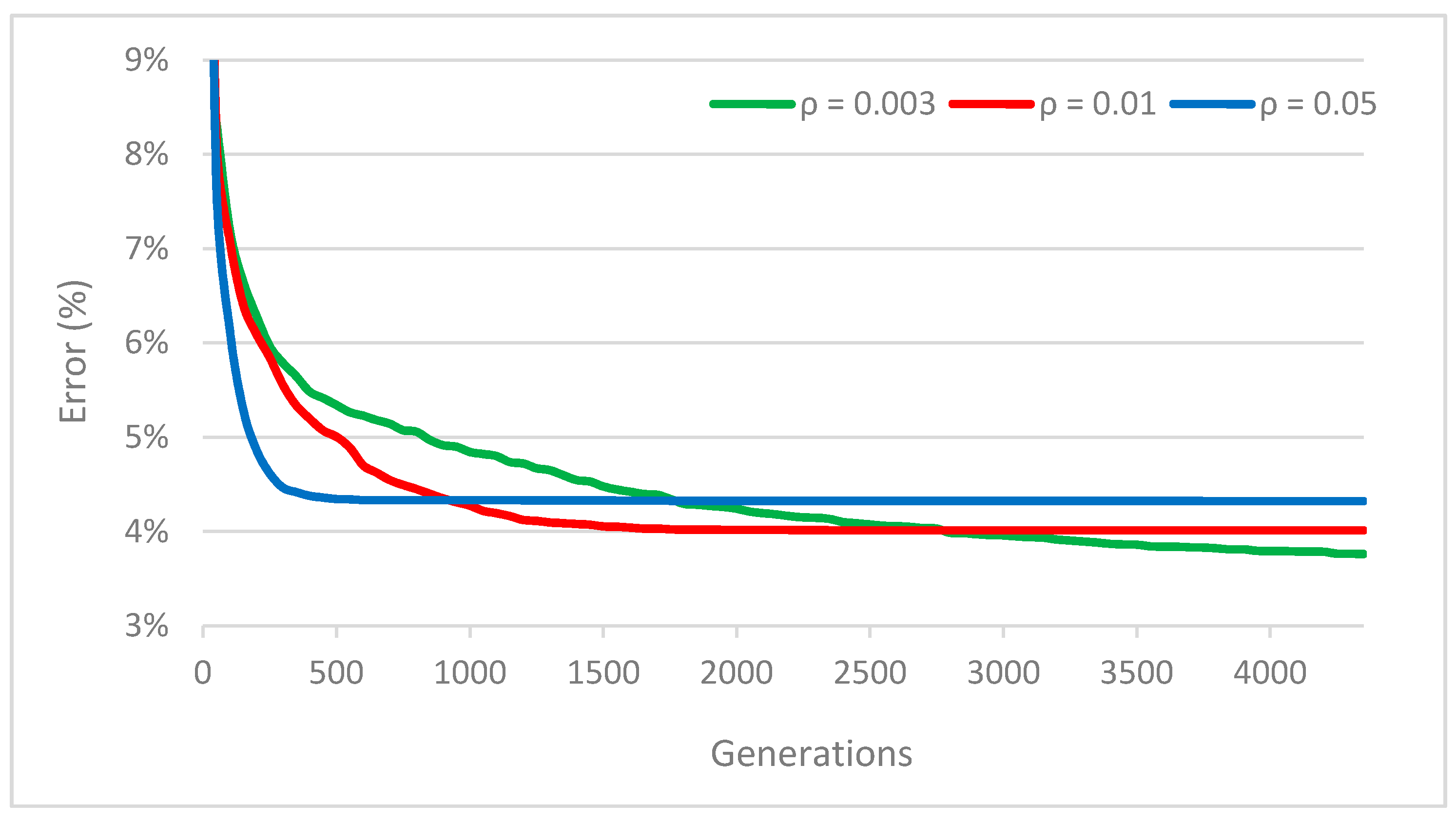
Then, the pheromone matrix modification process starts; this process is composed of two phases. In the first phase (lines 29 to 30), the trails in the pheromone matrix evaporate; the speed is controlled by the pheromone evaporation coefficient . In the second phase (lines 31 to 32), the pheromone matrix is updated according to best route . Trails between neighboring vertices in route are intensified. The strength depends on the pheromone updating coefficient as well as on the quality of solution compared to the best-known solution .
Although Algorithm 1, for the sake of simplicity, uses a constant number of generations to find a TSP solution (loop on lines 7 to 32), the real implementation enables two other termination conditions to end an individual iteration. The first one is the maximum time constraint; the second is the maximum specified number of generations without improving a solution (i.e., the number of generations in which the condition on line 26 is not met).
| Algorithm 1. ACO algorithm for the DTSP |
Algorithm_DTSP_ACO (V,Ng,Na,ρ,δ,τ,α,β)
for
to I do // Iterations for to Ng do // Generations for to Na do // Route for each ant while do for each do compute
if then do
if then do
for each
do // Evaporate pheromones
for to N do // Update pheromones returnC,R
|
Algorithm 2 presents the principle of the pheromone matrix initialization at the beginning of each -th TSP iteration (see line 6 in Algorithm 1). In the first phase, all elements in pheromone matrix are set to 1 (lines 2 to 3); this value represents the initial pheromone strength of a connection between two vertices. In the second phase, a solution from the previous iteration () is used to update the matrix. This is based on an assumption following from the DTSP problem that only a small percentage of vertices changed from one iteration to another. Thus, a great part of the information from the solution found in the previous iteration is also valid in the current iteration. This information is integrated into the pheromone matrix by intensifying the trails between neighboring vertices in route (lines 5 to 6). The strength of this intensification is controlled by the pheromone initialization coefficient . In the zero iteration () where there is no known route from the previous iteration, the second phase is skipped (see the condition on line 4). The second phase could also be skipped in case it is required to solve the DTSP problem as a number of independent TSP problems.
| Algorithm 2. Pheromone matrix initialization |
Initialize_Pheromone_Matrix (N,Ri−1,τ)
for
do
if
then do for to N do
return F
|
Algorithm 3 shows the principle of selecting the next vertex from set based on probabilities (see line 17 in Algorithm 1). The algorithm uses the simple roulette wheel selection principle. is a pseudo-random number generator with uniform distribution ranging from to .
| Algorithm 3. Selection of the next vertex in the route |
| Select_Next_Vertex (U,p1,p2, ...p|U|)
|
3.2. Simulated Annealing
The simulated annealing (SA) part of the ACO-SA algorithm is inspired by annealing in metallurgy, where this process is used to reduce the defects of material by way of heating and controlled cooling. The key idea behind the SA is to accept the worse solutions with some probability, thus expanding the search space explored for the global optimum. The SA can be used both for continuous and discrete state space.
The SA implementation presented in this section is only used for a single TSP problem instead of a series of TSP iterations. The reason for this is that it is needed for the hybridization with the ACO. To use it for the DTSP, the algorithm could be executed repeatedly with the solution from the previous iteration as an input.
Table 3 shows the key parameters of the SA algorithm; their function and place in the algorithm is mentioned below in more detail.
Table 4 records all new symbols and variables used in this section; symbols in common with
Section 3.1 can be found in
Table 2.
Algorithm 4 shows the SA algorithm for the TSP in pseudocode. As input, route enters the algorithm representing the first (initial) solution. This can be any feasible solution either found by another algorithm (e.g., by the nearest neighbor algorithm) or randomly generated (i.e., containing all vertices in random order). The algorithm works in generations (lines 4 to 19); during each generation, the same value is used for the temperature (starting with value in the first generation). When a generation ends, the temperature is lowered (line 18) and the next generation starts. When the temperature is lower than the minimum threshold , the algorithm ends, returning the best solution found.
In each generation, a number of transformations and replacements are conducted (lines 6 to 17). The transformation of a current solution into a new solution (line 7) is a key part of the algorithm. This process is discussed later in this section (see Algorithm 5). The newly created solution replaces the original (lines 10 to 13) with a probability (line 9) calculated according to the Metropolis criterion (5). If the new solution is better than the original, it is always replaced. Otherwise, the probability of replacements depends on the difference in quality of both solutions and the current temperature. Higher temperatures increase the chances of accepting worse solutions; this happens more often in the initial phases (generations) of the algorithm.
The numbers of conducted transformations and replacements within a generation are limited by the parameters and . Each generation ends when either or exceeds its permitted value. The best solution found during the execution of the algorithm is saved (lines 14 to 16) and returned when the algorithm ends (line 19).
| Algorithm 4. SA algorithm for the TSP |
Algorithm_TSP_SA (Vi,RSA,Tmax,Tmin,γ,n1max,n2max)
while
do // Generations while and do // Transformations
if
then do // Replacements
if
then do
return CSA,RSA
|
Table 5. Firstly, a random vertex from the original route is selected (except the first and the last vertices) to change its position (line 1); RandI(a,b) is a pseudo-random integer generator with uniform distribution ranging from
to
. Then, the range specifying the number of positions by which the selected vertex moves within the route is calculated (lines 2 to 3) using the
function which is a pseudo-random number generator with normal distribution with a mean of
and a standard deviation of
calculated according to Formula (6). This ensures that when the current temperature is not far from its maximum value, the selected vertex can be moved across the whole route (
for
), whereas when the current temperature is close to its minimum value, the selected vertex is moved only in the close vicinity around its position in the route (
for
). This principle ensures the extensive exploration of state space in the beginning phases of the algorithm and the tuning of the solution in the final phases. Finally, the vertex is moved in the transformed route
(lines 4 to 12) by a specified number of positions to the left (
) or the right (
).
| Algorithm 5. Solution transformation |
Transform_Solution (rSA,N,T,Tmax,Tmin)
// Vertex selection // Range
for to |range| do // Movement if then if then return rSA’
|
3.3. Hybridization
In this section, hybridization of the ACO and SA algorithms is proposed. The basic idea behind this is as follows: the ACO algorithm (
Section 3.1) is the key approach complemented by the SA algorithm (
Section 3.2) which is used as a local optimization process. This process is applied to the best solution (
) found by the ants in a generation; this solution inputs the SA algorithm where it is possibly improved.
Table 5 shows the new parameters controlling this local optimization process. These parameters determine the generations in which the SA algorithm is executed. The first one (
) controls the frequency of executions, the second (
) sets the last generation where the SA algorithm is executed (i.e., it is not executed in generations after the one given by this parameter).
Algorithm 6 shows the hybridization in pseudocode. The ACO part is simplified compared to the original, as shown in Algorithm 1. Instead, new procedures are used as follows:
Find_Route (used on line 7 in Algorithm 6). This procedure covers the process of finding a route for each ant (it replaces lines 10 to 22 in Algorithm 1).
Get_Best_Route (used on line 8 in Algorithm 6). This procedure selects the best solution found by ants (it replaces lines 23 to 25 in Algorithm 1).
Get_Better_Route (used on line 11 in Algorithm 6). This procedure returns the better of two solutions in order to save the best solution found so far (it replaces lines 26 to 28 in Algorithm 1).
Evaporate_Pheromone_Matrix (used on line 12 in Algorithm 6). This procedure evaporates the pheromone matrix as shown on lines 29 to 30 in Algorithm 1.
Update_Pheromone_Matrix (used on line 13 in Algorithm 6). This procedure updates the pheromone matrix as shown on lines 31 to 32 in Algorithm 1.
The local optimization process in the form of the SA algorithm is located on lines 9 to 10 in Algorithm 6. This process is executed provided that the condition on line 9 is satisfied; this condition uses parameters as described in
Table 5. If the condition is satisfied, the SA algorithm is executed; the best route found by ants in a generation (
) inputs the algorithm as an initial solution (
). If the SA algorithm improves the initial solution, the solution
is replaced by this new improved solution (if not, the solution returned by the SA algorithm is the same as the initial solution). The improved solution is used to update the pheromone matrix (line 13). Then, a new generation starts and the whole principle is repeated until the termination condition is met.
| Algorithm 6. Hybrid ACO-SA algorithm |
Algorithm_DTSP_ACO-SA (V,Ng,Na,ρ,δ,τ,α,β,Tmax,Tmin,γ,nimax,n2max,safreq,sanum)
for to I do // Iterations for to Ng do // Generations
for to Na do if and then do Evaporate_Pheromone_Matrix (F,ρ) Update_Pheromone_Matrix (F,δ,rbest) return R
|
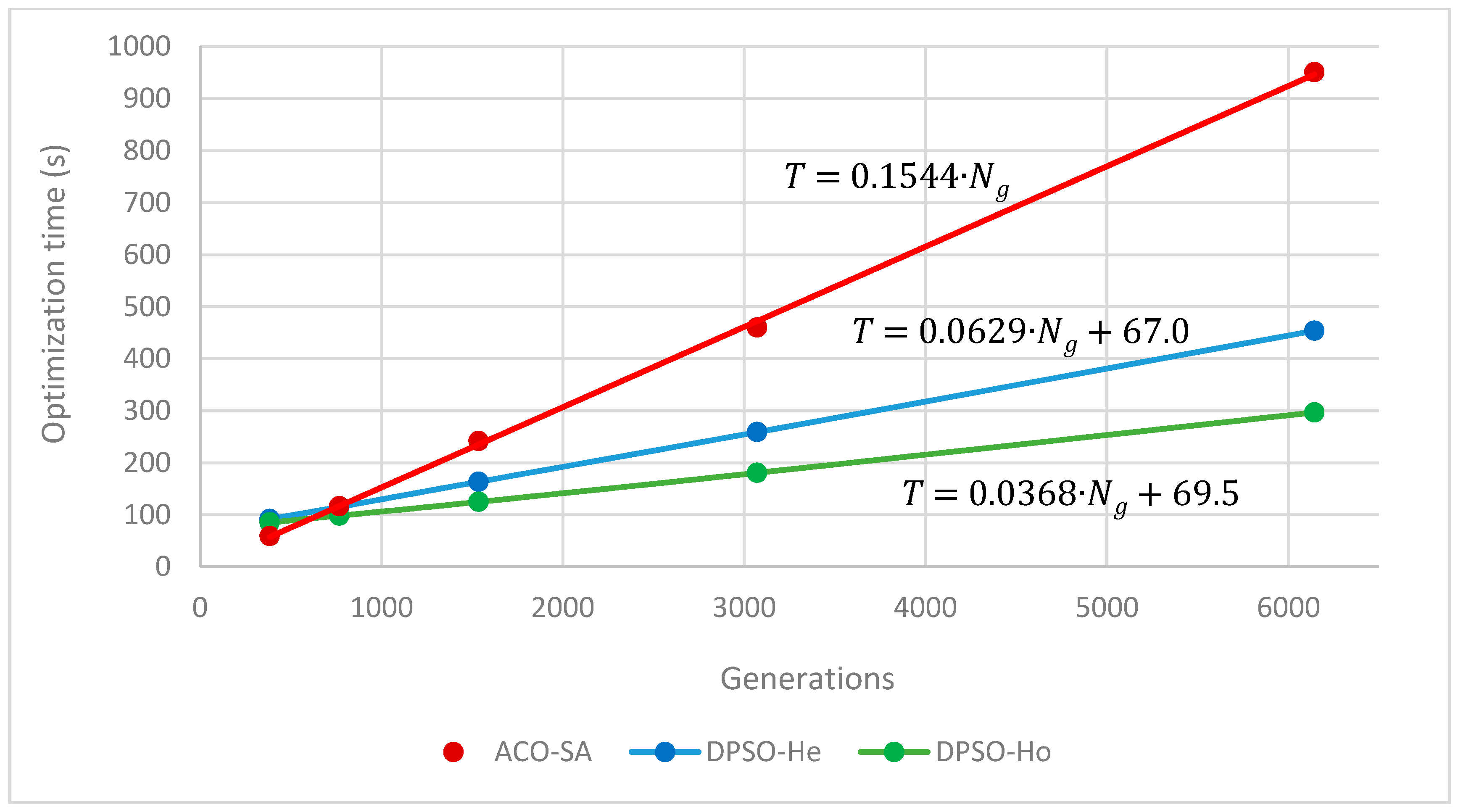
3.4. Computational Complexity
The computational complexity of the ACO algorithm is defined in Formula (7). It depends on the number of generations
(linear dependence), the size of the population of ants
(linear dependence), and the number of vertices
in the graph (quadratic dependence). The dependence on the number of vertices emerges three times on the left side of the formula: the left term
is caused by finding a route for each ant (quadratic dependence), the middle term
represents the pheromone evaporation process (quadratic dependence), and the right term
represents the pheromone updating process (linear dependence). However, both the pheromone evaporation and pheromone updating processes can be ignored (see the right side of the formula) as they are outside the loop for finding routes for ants. The quadratic complexity of finding a route for each ant is caused by consecutive insertion of
vertices into the route; the selection of each vertex is also linearly dependent on
as every vertex still missing in the route has to be considered (i.e., the probabilities of inserting all missing vertices have to be calculated).
The computational complexity of the SA algorithm is defined in Formula (8). It depends on the number of generations
(linear dependence), the maximum number of transformations in a generation
(linear dependence), and the number of vertices
in the graph (linear dependence). The number of generations for the SA algorithm was not defined in the text above; it depends on the maximum and minimum temperature and cooling coefficient as shown in Formula (9). The maximum number of transformations
is used in Formula (8) instead of the maximum number of replacements
because the number of transformations is always equal to or greater than the number of replacements. The linear dependence on the number of vertices
represents the process of the solution transformation and its following evaluation.
The final computational complexity of the proposed ACO-SA algorithm is defined in Formula (10) which combines Formulas (7) and (8). In each generation of the ACO part of the algorithm, routes for each ant need to be found (term
), and then the SA algorithm is executed (term
).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}