A Low-Cost Chamber Prototype for Automatic Thermal Analysis of MEMS IMU Sensors in Tilt Measurements Perspective


Abstract
:1. Introduction
2. The Thermal Chamber Prototype
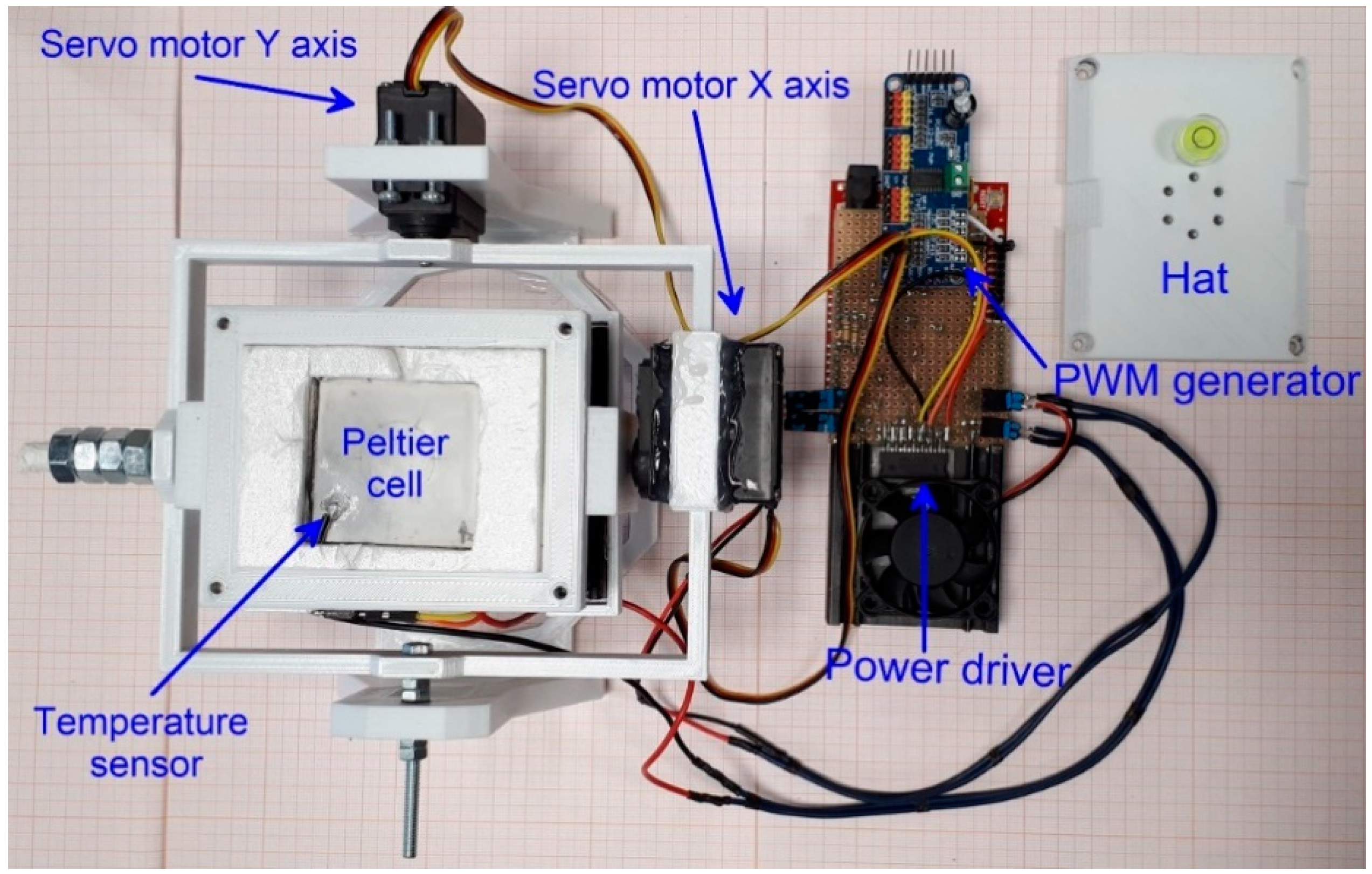
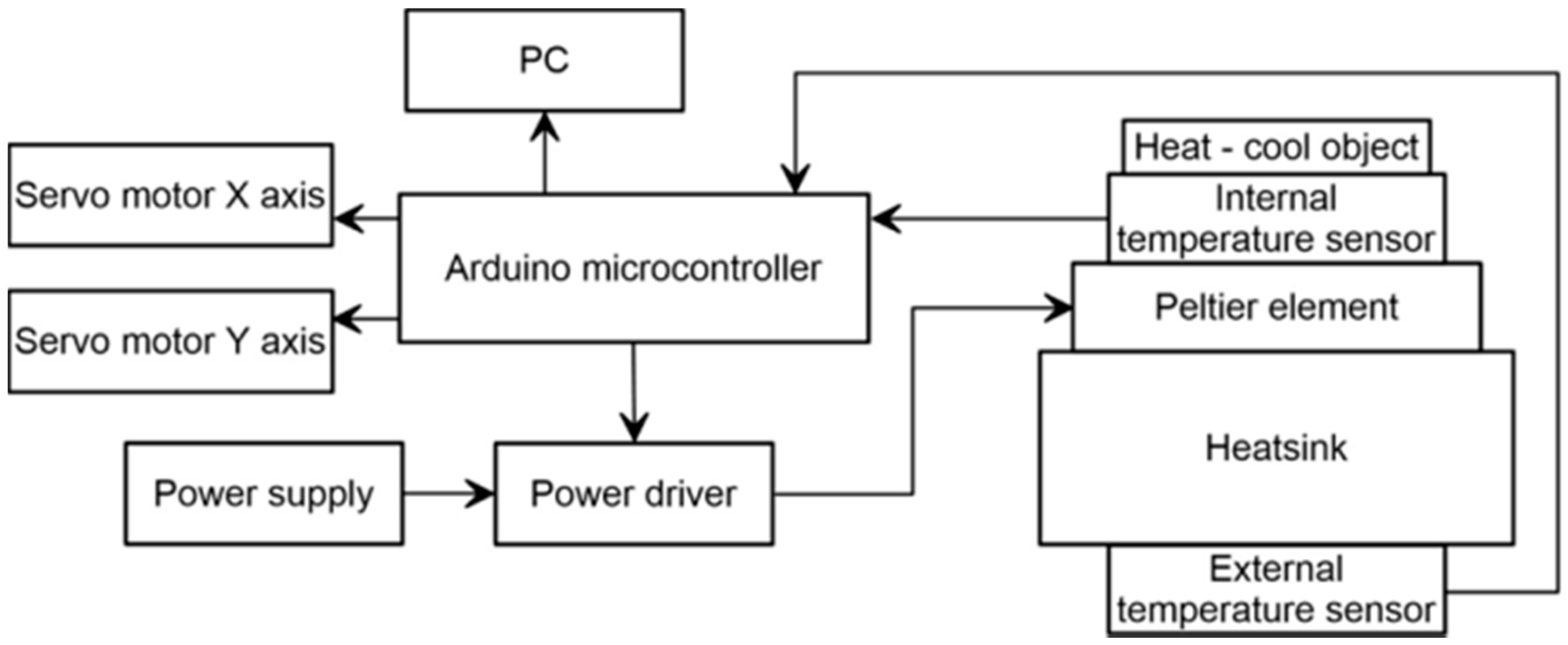
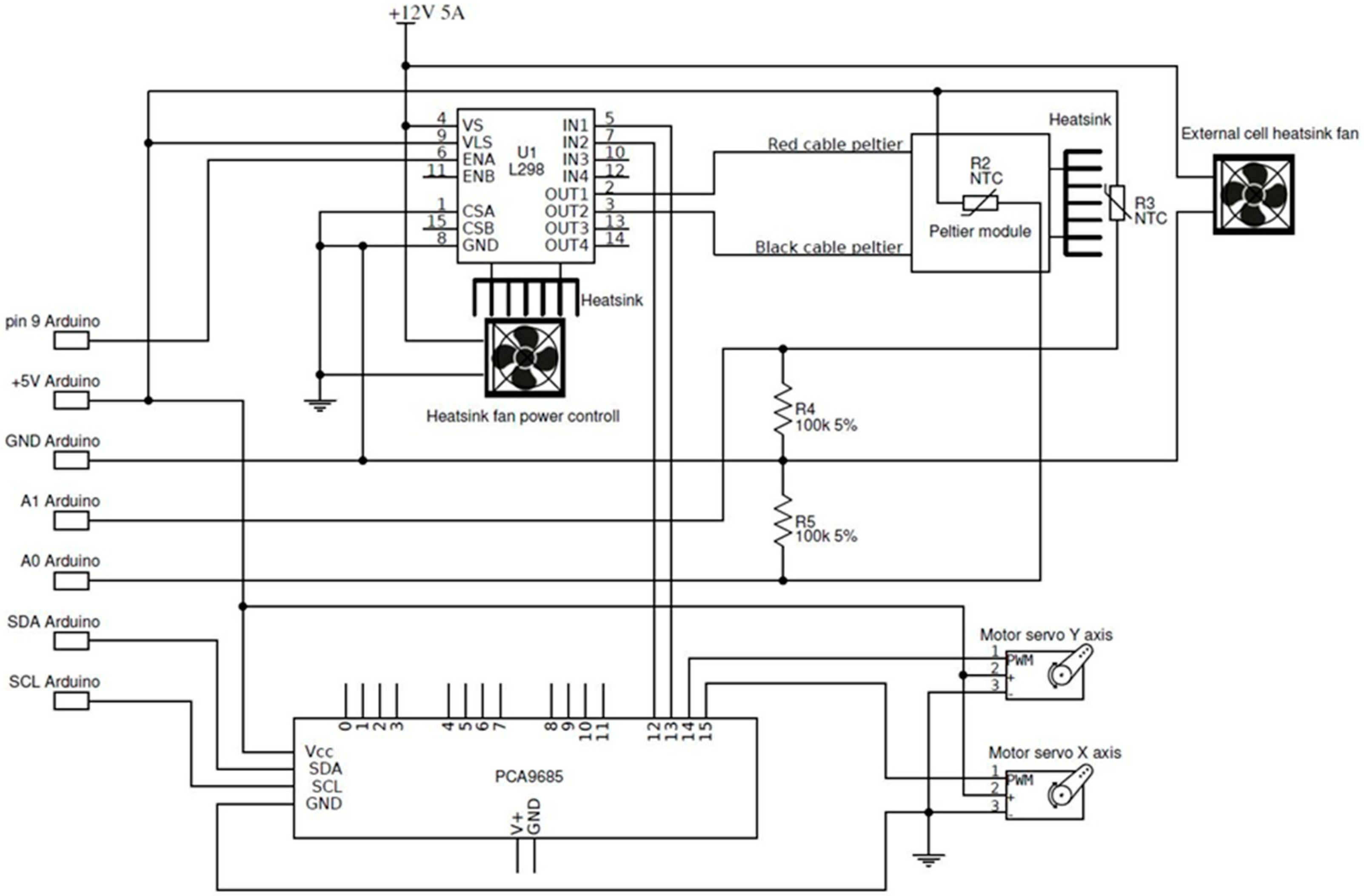
2.1. Concept and Hardware
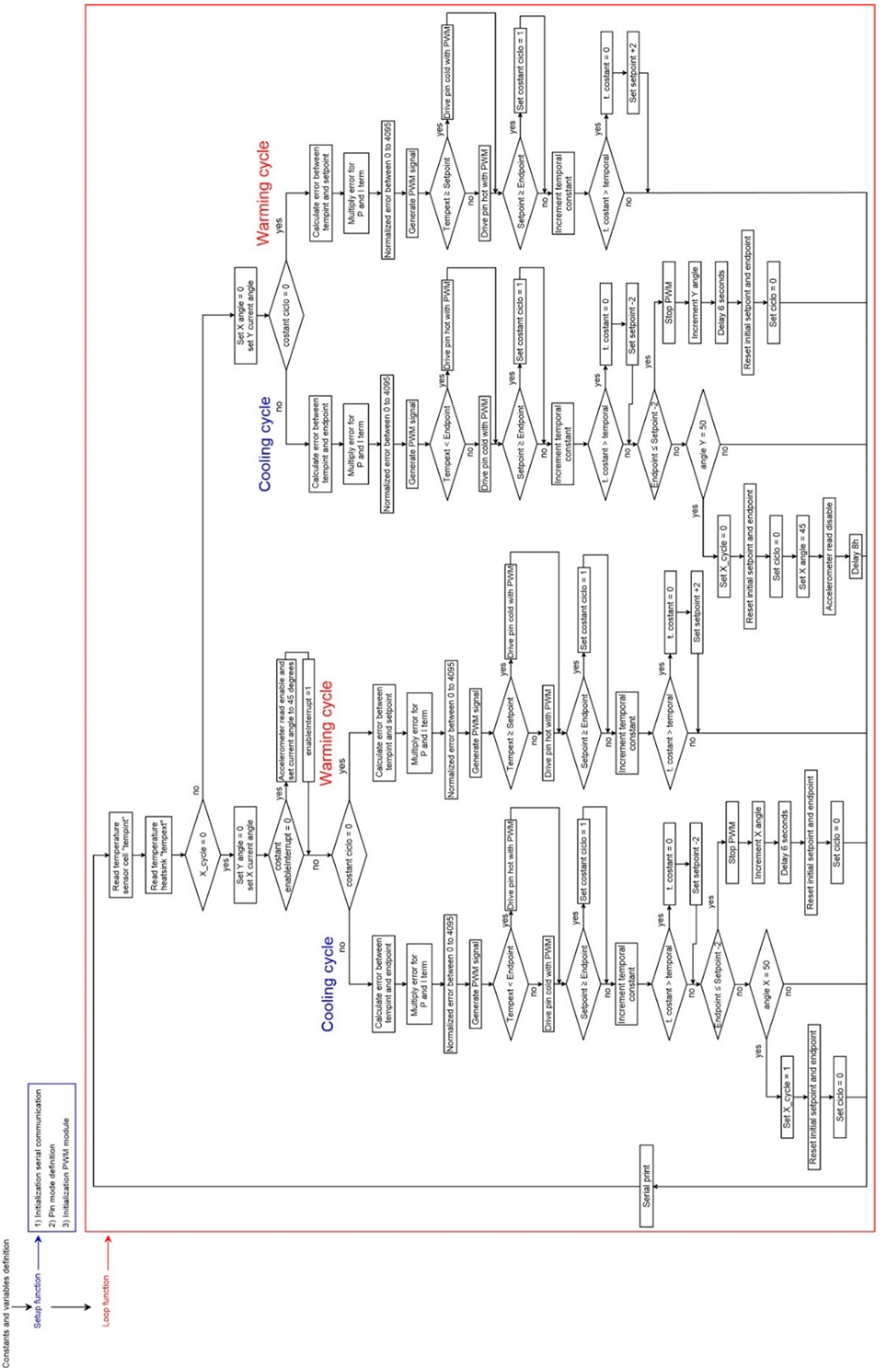
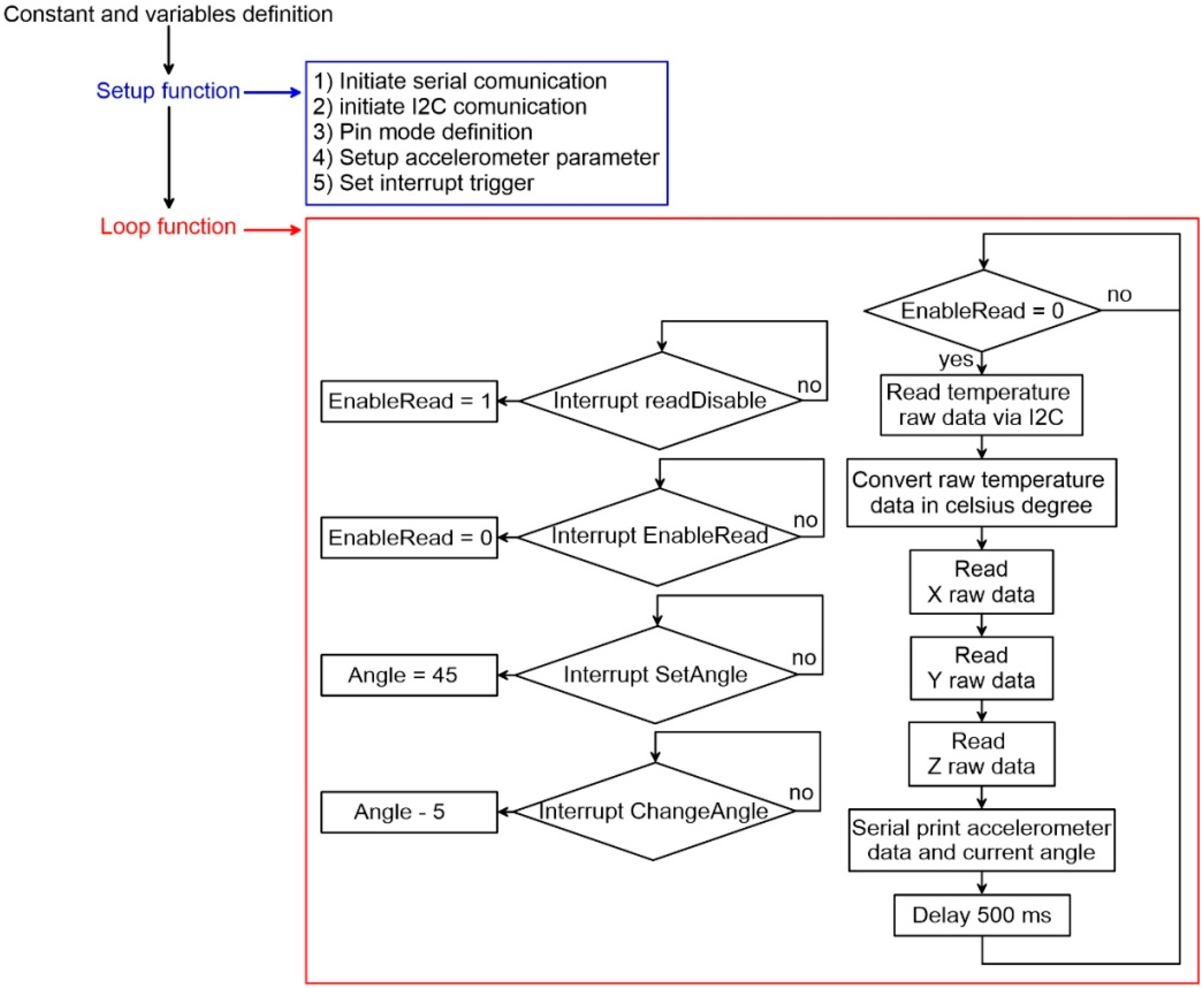
2.2. Software and Workflow
3. Application: Thermal Analysis of MEMS
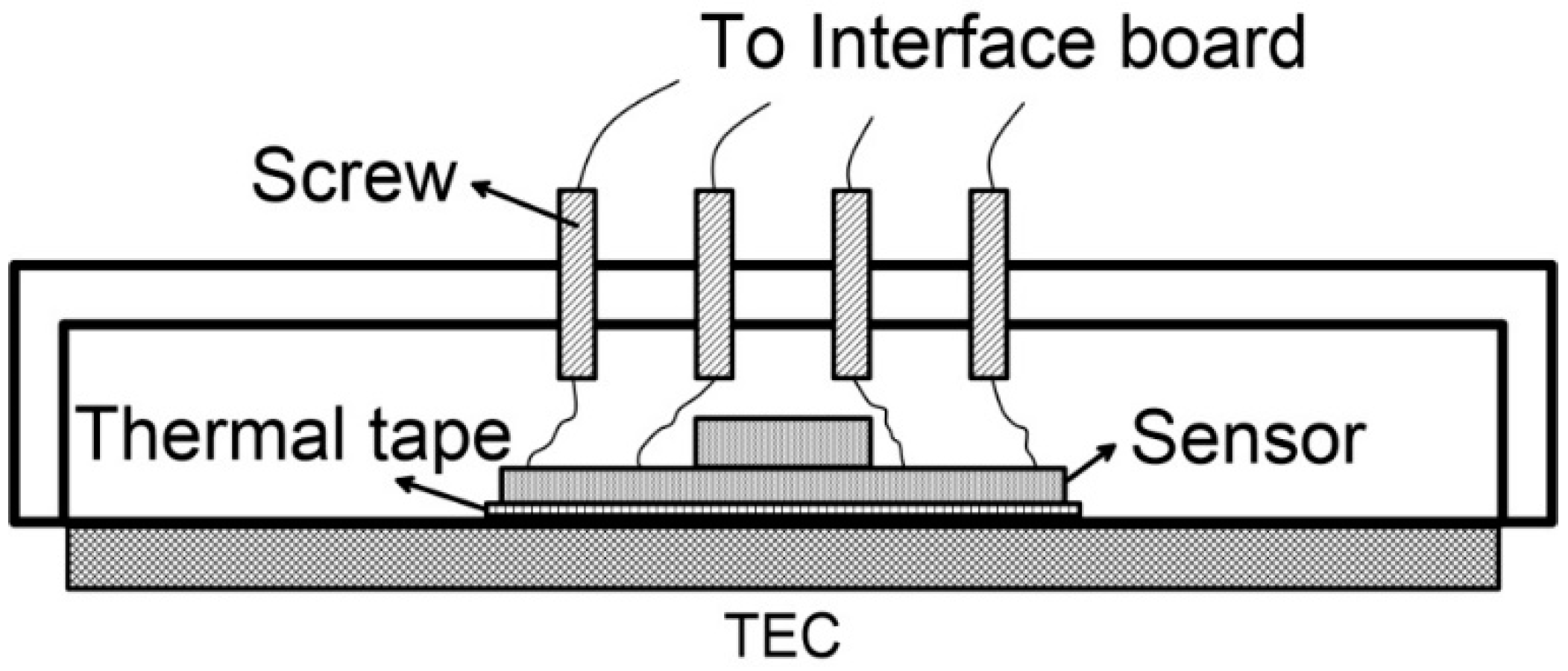
3.1. Sensor and Interface
3.2. Thermal Analysis
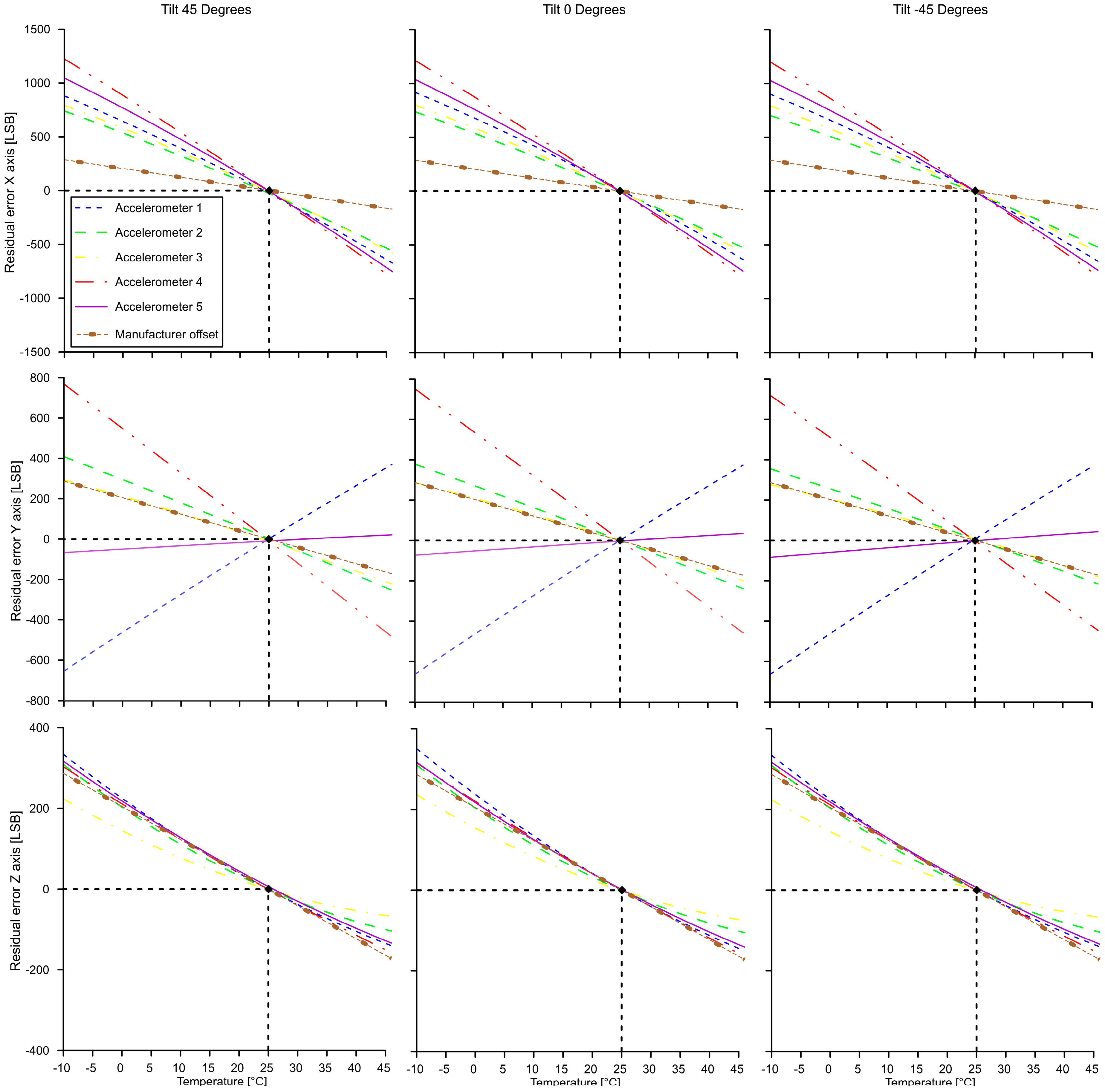
3.3. Thermal Behavior of MEMS Accelerometer
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Van Emmerik, T.; Steele-Dunne, S.; Hurt, R.; Gentine, P.; Guerin, M.; Oliveira, R.S.; Wagner, J.; Selker, J.; van de Giesen, N. Measuring Tree Properties and Responses Using Low-Cost Accelerometers. Sensors 2017, 17, 1098. [Google Scholar] [CrossRef] [PubMed]
- Feng, M.; Fukuda, Y.; Mizuta, M.; Ozer, E. Citizen Sensors for SHM: Use of Accelerometer Data from Smartphones. Sensors 2015, 15, 2980–2998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daponte, P.; de Vito, L.; Picariello, F.; Riccio, M. State of the art and future developments of measurement applications on smartphones. Measurement 2013, 46, 3291–3307. [Google Scholar] [CrossRef]
- Li, C.; Fernandez-Streeger, T.M.; Link, J.A.B.; May, M.; Azzam, R. Use of Mems Accelerometers as a Getechnical Monitoring Method for Ground Subsidence. Acta Geodyn. Geomater. 2014, 11, 337–349. [Google Scholar] [CrossRef]
- Milne, D.; le Pen, L.; Watson, G.; Thompson, D.; Powrie, W.; Hayward, M.; Morley, S. Proving MEMS Technologies for Smarter Railway Infrastructure. Procedia Eng. 2016, 143, 1077–1084. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.W.; Zhang, D.M.; Ayyub, B.M. An integrated risk sensing system for geo-structural safety. J. Rock Mech. Geothech. Eng. 2017, 9, 226–238. [Google Scholar] [CrossRef]
- Uchimura, T.; Towhata, I.; Wang, L.; Nishie, S.; Yamaguchi, H.; Seko, I.; Qiao, J. Precaution and early warning of surface failure of slopes using tilt sensors. Soil Found. 2015, 55, 1086–1099. [Google Scholar] [CrossRef] [Green Version]
- Bedon, C.; Bergamo, E.; Izzi, M.; Noè, S. Prototyping and Validation of MEMS Accelerometers for structural Health Monitoring—The case Study of the Pietratagliata Cable-Stayed Bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar] [CrossRef]
- Kavithaa, S.; Daniela, R.J.; Sumangala, K. Design and Analysis of MEMS Comb Drive Capacitive Accelerometer for SHM and Seismic Applications. Measurement 2016, 93, 327–339. [Google Scholar] [CrossRef]
- Swagato, D.; Purnachandra, S. A review of some advanced sensors used for health diagnosis of civil engineering structures. Measurement 2018, 129, 68–90. [Google Scholar] [CrossRef]
- Han, M.; Kim, J.K.; Park, J.H.; Kim, W.; Kang, S.W.; Kong, S.H.; Jung, D. Sensitivity and Frequency-Response Improvement of a Thermal Convection–Based Accelerometer. Sensors 2017, 17, 1765. [Google Scholar] [CrossRef] [PubMed]
- Fisher, C.J. Using an Accelerometer for Inclination Sensing; AN-1057 Application Note; Analog Devices: Norwood, MA, USA, 2010. [Google Scholar]
- Guerriero, L.; Guerriero, G.; Grelle, G.; Guadagno, F.M.; Revellino, P. Brief Communication: A low-cost Arduino®-based wire extensometer for earth flow monitoring. Nat. Hazards Earth Syst. Sci. 2017, 17, 881–885. [Google Scholar] [CrossRef]
- Bitella, G.; Rossi, R.; Bochicchio, R.; Perniola, M.; Amato, M. A novel low-cost open-hardware platform for monitoring soil water content and multiple soil-air-vegetation parameter. Sensors 2014, 14, 19639–19659. [Google Scholar] [CrossRef] [PubMed]
- di Gennaro, S.F.; Matese, A.; Mancin, M.; Primicerio, J.; Palliotti, A. An open-source and low-cost monitoring system for precision enology. Sensors 2014, 14, 23388–23397. [Google Scholar] [CrossRef] [PubMed]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a low-cost arduino-based sonde for coastal applications. Sensors 2016, 16, 528. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Yang, F.; Bao, X.; Jang, T. Robust Optimization of a MEMS Accelerometer Considering Temperature Variations. Sensors 2015, 15, 6342–6359. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, M.; Pang, L.; Xiao, Z.; Shen, C.; Cao, H.; Shi, Y.; Liu, J. Temperature Drift Compensation for High-G MEMS Accelerometer Based on RBF NN Improved Method. Appl. Sci. 2019, 9, 695. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. Thermal Compensation of Low-Cost MEMS Accelerometers for Tilt Measurements. Sensors 2018, 18, 2536. [Google Scholar] [CrossRef]
- Riffat, S.B.; Ma, X. Thermoelectrics: A review of present and potential applications. Appl. Therm. Eng. 2003, 23, 913–935. [Google Scholar] [CrossRef]
- Xiaoqin, S.; Linfeng, Z.; Shunguang, L. Performance of a thermoelectric cooling system integrated with a gravity-assisted heat pipe for cooling electronics. Appl. Therm. Eng. 2017, 116, 433–444. [Google Scholar] [CrossRef]
- STMicroelectronics. L298 Dual Full-Bridge Driver; L298 Datasheet; STMicroelectronics: Geneva, Switzerland, 2000. [Google Scholar]
- Andreev, S.K.; Bobev, S.R.; Aleksandrova, M.P.; Videkov, V.H. Programmable setup for Peltier element control with fine smooth regulation of the temperature about testing of semiconductor structures. In Proceedings of the 2016 XXV International Scientific Conference Electronics, Sozopol, Bulgaria, 12–14 September 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Sun, J. Pulse-Width Modulation. In Dynamics and Control of Switched Electronic Systems; Vasca, F., Iannelli, L., Eds.; Advances in Industrial Control; Springer: London, UK, 2002. [Google Scholar]
- Chengming, L.; Rongshun, C. Optimal Self-Tuning PID Controller Based on Low Power Consumption for a Sever Fan Cooling System. Sensors 2015, 15, 11685–11700. [Google Scholar] [CrossRef]
- Bista, D. Understanding and Design of an Arduino-Based PID Controlled. Ph.D. Dissertation, Virginia Commonwealth University, Richmond, VA, USA, 2016. [Google Scholar]
- STMicroelectronics. LSM9DS0, iNemo Inertial Module: 3D Accelerometer, 3D Gyroscope, 3D Magnetometer; LSM9DS0 Datasheet; STMicroelectronics: Geneva, Switzerland, 2013. [Google Scholar]
- Jiménez-Naharro, R.; Gòmez-Bravo, F.; Medina-Garcìa, J.; Sànchez-Raya, M.; Gòmez-Galàn, J.A. A Smart sensor for Defending against Clock Glitching Attacks on the I2C Protocol in Robotic Applications. Sensors 2017, 17, 677. [Google Scholar] [CrossRef] [PubMed]
- Kourepenis, A.; Borenstein, J.; Connely, J.; Elliott, R.; Ward, P.; Weinberg, M. Performance of mems inertial sensors. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1996; IEEE Plans: Piscataway, NJ, USA, 1998. [Google Scholar] [CrossRef]
- Chau, K.H.L.; Lewis, S.R.; Zhao, Y.; Howe, R.T.; Bart, S.F.; Marcheselli, R.G. An integrated Force-balanced capacitive accelerometer for Low-G applications. Sens. Actuators A Phys. 1995, 54, 472–476. [Google Scholar] [CrossRef]
- Shaeffer, D.K. MEMS Inertial Sensors: A Tutorial Overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer | Total Error X Axis 45 | Total Error X Axis 0 | Total Error X Axis −45 |
|---|---|---|---|
| 1 | 1553 | 1553 | 1553 |
| 2 | 1300 | 1262 | 1223 |
| 3 | 1373 | 1367 | 1362 |
| 4 | 2037 | 2014 | 1991 |
| 5 | 1797 | 1781 | 1764 |
| Mean | 1612 | 1595.4 | 1578.6 |
| Standard Deviation (σ) | 273 | 273.8 | 275.1 |
| Accelerometer | Total Error Y Axis 45 | Total Error Y Axis 0 | Total Error Y Axis −45 |
|---|---|---|---|
| 1 | 1024 | 1037 | 1048 |
| 2 | 662 | 617 | 571 |
| 3 | 515 | 485 | 457 |
| 4 | 1252 | 1226 | 1165 |
| 5 | 88 | 108 | 128 |
| Mean | 708.2 | 694.6 | 673.8 |
| Standard Deviation (σ) | 404.8 | 398.4 | 383.8 |
| Accelerometer | Total Error Z Axis 45 | Total Error Z Axis 0 | Total Error Z Axis −45 |
|---|---|---|---|
| 1 | 500 | 474 | 500 |
| 2 | 415 | 412 | 415 |
| 3 | 348 | 291 | 348 |
| 4 | 479 | 460 | 479 |
| 5 | 458 | 451 | 458 |
| Mean | 440 | 417.6 | 440 |
| Standard Deviation (σ) | 53.9 | 66.5 | 53.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Low-Cost Chamber Prototype for Automatic Thermal Analysis of MEMS IMU Sensors in Tilt Measurements Perspective. Sensors 2019, 19, 2705. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122705
Ruzza G, Guerriero L, Revellino P, Guadagno FM. A Low-Cost Chamber Prototype for Automatic Thermal Analysis of MEMS IMU Sensors in Tilt Measurements Perspective. Sensors. 2019; 19(12):2705. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122705
Chicago/Turabian StyleRuzza, Giuseppe, Luigi Guerriero, Paola Revellino, and Francesco M. Guadagno. 2019. "A Low-Cost Chamber Prototype for Automatic Thermal Analysis of MEMS IMU Sensors in Tilt Measurements Perspective" Sensors 19, no. 12: 2705. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122705