1. Introduction
Multielectrode neural interfaces are widely used in basic neuroscience research [
1,
2,
3,
4] and for development of advanced brain-computer interfaces and neuroelectronic prostheses [
5,
6,
7]. Taking advantage of large numbers of closely spaced microelectrodes, such systems make it possible to record activity of large neuronal populations with resolution of individual neurons, providing new insights into processing and coding of information in the brain circuits. Systems with several hundred to a few thousand of channels are now routinely used for recording the brain activity in live animals [
8,
9] and a prototype device with tens of thousands of recording channels was reported recently [
10]. Systems dedicated to large-scale recording of brain activity in human are also being developed [
11].
The neural signals acquired by extracellular electrodes are of two types. First, the action potentials (APs) can be recorded from individual neurons located close to the sensing electrode. An action potential is generated by a neuron when the total input signal received by this cell—either from sensory circuits of the central nervous system like the eyes or ears, or from other neurons—exceeds a specific threshold [
12]. The APs recorded by extracellular electrodes have forms of short pulses with frequency spectrum from 300 Hz to 5 kHz and amplitudes range 50 μV
pp–2 mV
pp (peak-to-peak). Second, the electrodes can record local field potentials (LFPs) that are primarily generated by ionic currents that occur at the synapses—the physiological connections between neurons—when the information is transferred between cells; however, other processes also contribute to the LFPs [
13]. The LFPs are low-frequency oscillations (1–300 Hz) with amplitudes up to 10 mV
pp.
The readout electronics for modern multielectrode systems is routinely designed as application specific integrated circuits (ASIC) that can comprise hundreds or thousands of recoding amplifiers on a single chip. High-fidelity recording of neuronal signals requires that the noise within the AP range (300 Hz–10 kHz) and the LFP range (1–300 Hz) is not much higher than 5 μV. Also, signals up to ~10 mV
pp should be recorded with the total harmonic distortion on the order of 1% or lower [
14]. Minimization of the dissipated power and silicon area is also critical for the design of neuronal interfaces with very large number of recording channels.
One technical difficulty in electrical recording of neural signals is related to the large DC voltage at the input of the amplifier that results from electrochemical interactions between the electrode and the tissue [
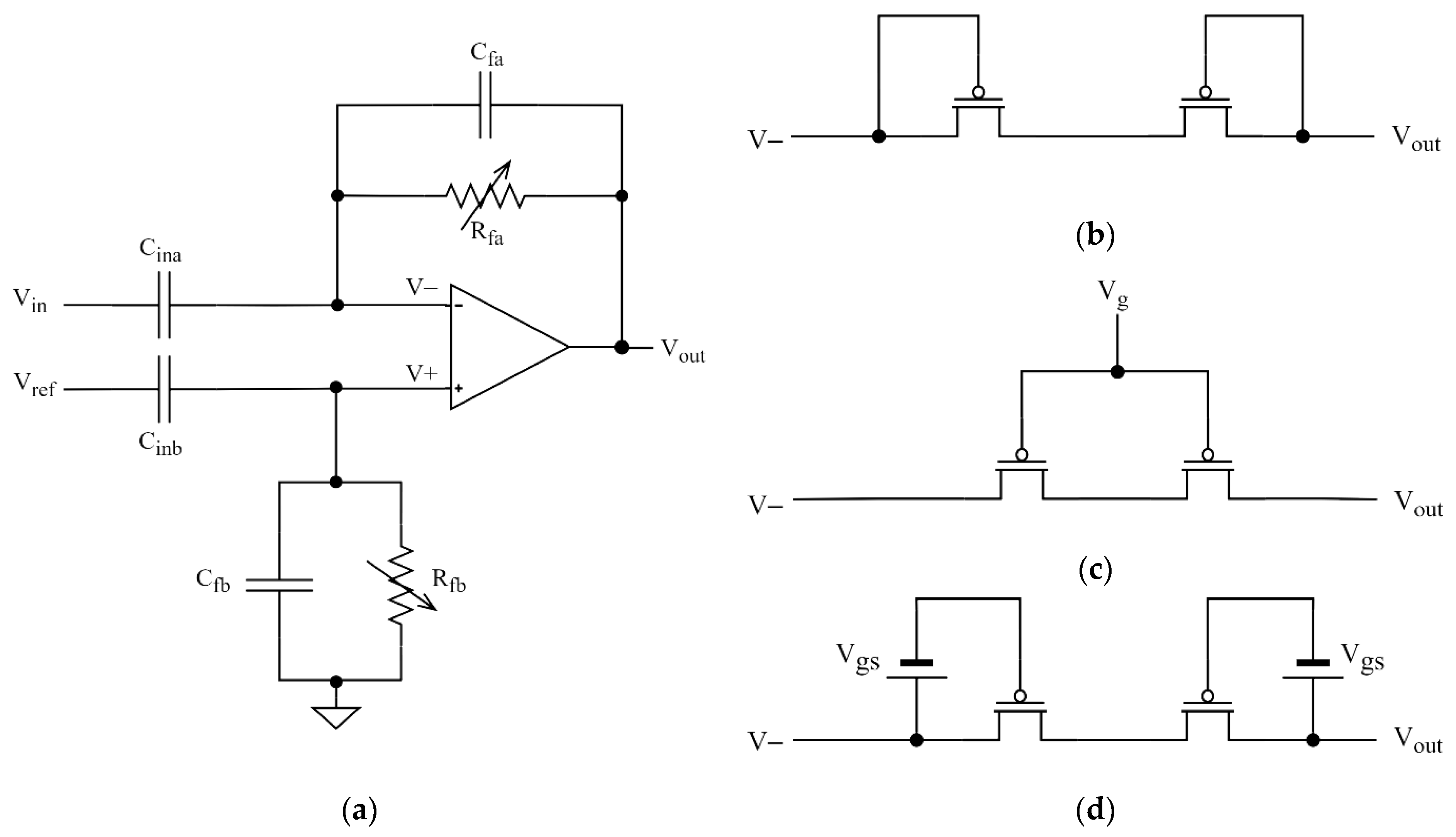
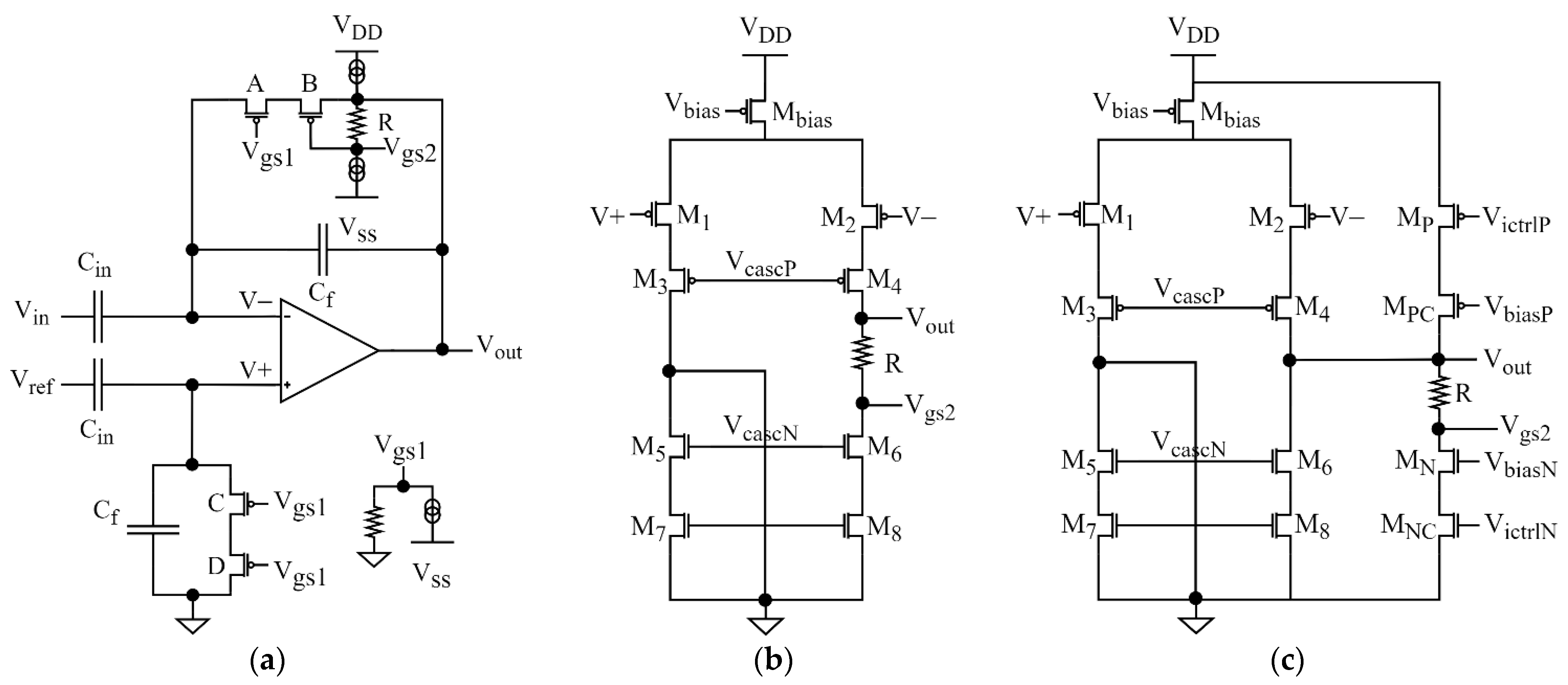
15]. The recording circuit must cut off this DC electrode voltage with high-pass filter with lower cutoff frequency typically on the order of 1 Hz and amplify the remaining AC signals with a gain on the order of 40 dB. Most of the multichannel integrated neural amplifiers are based on the architecture proposed in [
15] (
Figure 1a); in some designs, the circuit is followed by another amplification stage. The gain of the circuit shown in
Figure 1a is given by the
Cina/Cfa ratio and the cutoff frequency of the AC-coupling circuit is defined by the
Rfa × Cfa product [
15].
Due to silicon area restrictions, the
Cin is typically in the range 5–20 pF and the
Cf capacitance is typically in the range of tens to hundreds of fF. The feedback resistance in the TΩ range is necessary to achieve sufficiently large time constant. Such a resistance is realized by transistors connected in diode configuration [
15] (
Figure 1b) or in subthreshold mode that allows one to tune the channel resistance value by changing the gate voltage [
16,
17,
18] (
Figure 1c). Such tuning allows the user to control the cutoff frequency of the high-pass filtering and to find—for specific experimental conditions—the optimal compromise between the two requirements:
- -
efficacy of filtering out of the ultra-slow oscillations present in the brain [
19] and electrode drifts, which improves with increasing the cutoff frequency,
- -
the quality of recording of low-frequency signals with minimized amplitude and phase distortions related to analog high-pass filtering, which improves with lowering of the cutoff frequency.
As the two requirements mentioned above are difficult to define quantitatively in a general way, the ability to control the cutoff frequency of the high-pass filter is a desirable—even if not mandatory—feature of a neural amplifier.
The circuitry shown in
Figure 1a makes it possible to achieve very low input-referred noise values. Since the resistor
Rfa is in the feedback loop, its thermal noise is divided by the amplifier gain when referred to the input. Although this does not apply to resistor
Rfb, its integrated thermal noise is minimized thanks to the parallel connection with the large capacitor
Cinb (detailed analysis of the thermal noise introduced by the AC-coupling circuit is presented in
Section 4).
Three alternative approaches to remove the electrode offset have been proposed. First, a high-pass RC filter can be used to remove the DC voltage at the input of the amplifier that works without feedback loop [
14,
20]. This solution has worse noise performance than the circuit shown in
Figure 1a, since the thermal noise source from the large resistance is located directly at the amplifier input. The rms (root mean square) value of noise can be minimized by setting the cutoff frequency to very low values—much below the frequency range of interest [
20]—but this would compromise on filtering out very slow signals, as discussed previously. As a result, open-loop neural amplifiers use larger input capacitors (20 pF and more) to improve the signal-to-noise ratio (SNR). This comes at the cost of increased area, which is not optimal for systems with high channel counts.
Chopper stabilization is another technique to remove electrode offset in neural amplifiers [
21,
22]. This method uses modulation to shift the spectrum of the input signal to higher frequencies and to minimize the problem of 1/
f noise in the amplification circuits [
23]. However, high complexity of the design (further increased by a dedicated feedback loop to boost the input impedance, which is low in such circuits) results in increased circuit area.
The third alternative approach to remove the electrode DC voltage is to use a low‑pass filter in the feedback loop of the amplifier, which allows for subtraction of the low-frequency signal components (including the offset) from the input signal by a differential amplifier [
24,
25]. The low-pass filter requires using additional operational amplifier in the feedback loop that increases the circuit area and power. Using a sigma-delta modulation for low-pass filtering was proposed in [
25] with a promise of reduced circuit area in case of using higher-density CMOS process. However, the presented amplifier design in 130 nm technology has a total area (amplifier + ADC) per channel at ~0.05 mm
2, which is 3–4 times more than the most area-efficient existing designs. At the same time, using very high-density technologies for a large-scale design (with thousands of recording channels) that is not expected to be produced in high volume is impractical because of very high cost of fabrication.
In overall, the architecture shown in
Figure 1 remains the gold standard for modern neural amplifiers [
26,
27,
28]. Many designs based on this circuit idea, with excellent noise performance and low power consumption, have been reported; for a review see [
29,
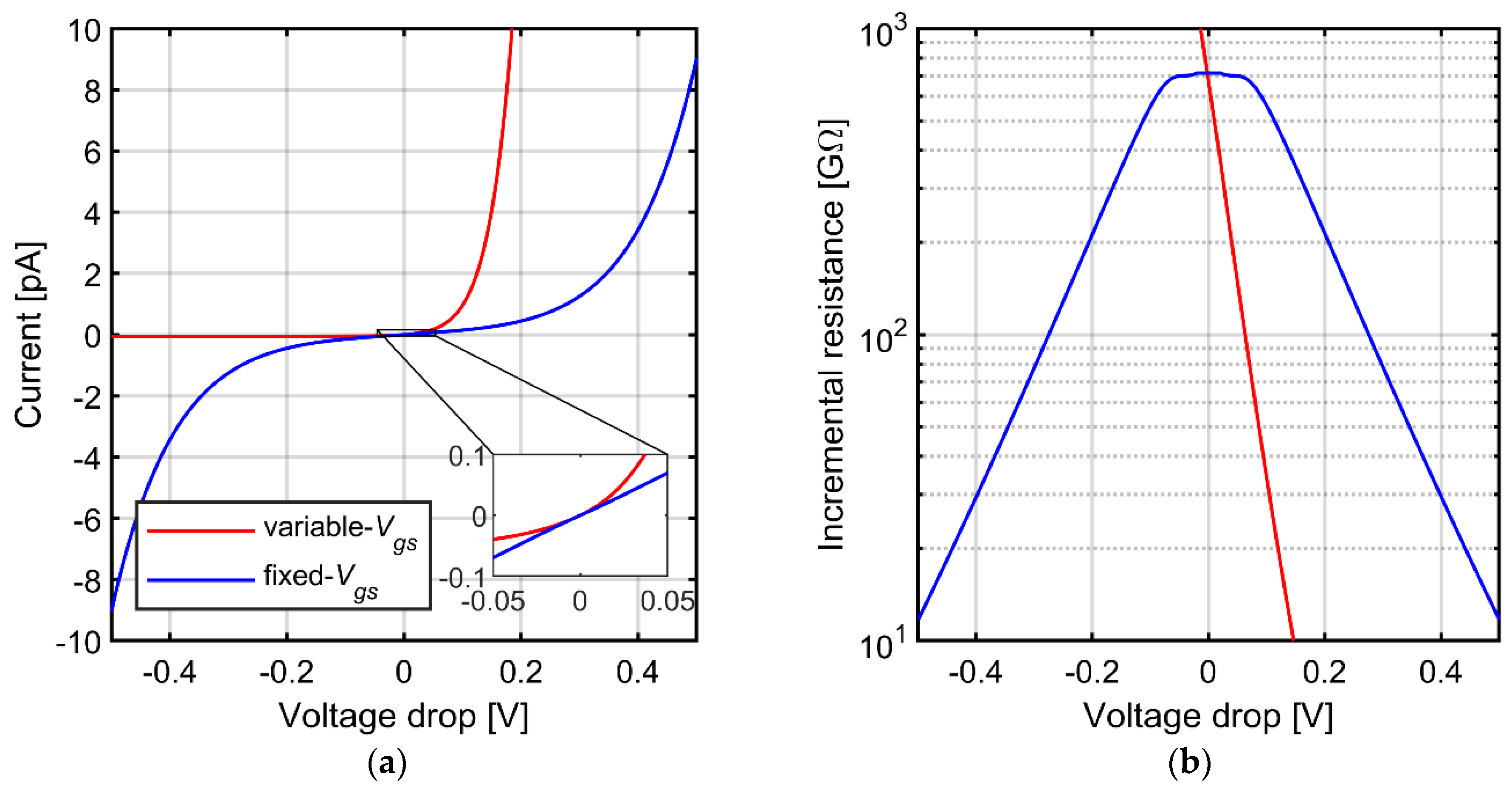
30]. However, a weak point of the pseudoresistor is its poor linearity. The pseudoresistor is placed in the feedback loop and the voltage drop across this resistance is identical to the amplifier output voltage. Within the range of the output voltage swing (several hundreds of mV to 1 V) the effective resistance of a pseudoresistor may differ by several orders of magnitude [
15]. For the circuit with tunable cutoff frequency (
Figure 1c) the main reason for the nonlinearity is the modulation of
Vgs bias voltage by the continuously changing voltage across the resistor. This nonlinear behavior affects the THD of the circuit, in particular for input signals of large amplitudes and frequencies close to the cutoff frequency of the AC-coupling circuit.
Very few of the published articles on neural amplifiers discuss this problem. Kassiri et al. [
31] analyzed several subthreshold two-transistor configurations with fixed-
Vgs voltage for the pseudoresistors and achieved significant reduction of nonlinear distortion compared with the classic diode-based architecture. However, the distortion level reported in that paper is still high for 0.5 V
pp voltage swing across the resistors. Another paper by the same group includes measurements of the THD vs. signal frequency for the AC-coupled amplifier. The reported value was 3% for the signal frequency equal to cutoff frequency, and input signal amplitude of 1.4 mV
pp [
32]. The distortion for larger amplitudes was not shown. To our knowledge, this is the only published measurement of THD as a function of signal frequency for amplifiers of this class.
It is important to note that the THD value of neural amplifiers is typically reported in the literature for the frequency of 1 kHz. Since this frequency is about three orders of magnitude higher than the cutoff frequency of the AC coupling circuit, the impedance of the feedback loop at this point is entirely defined by the capacitor Cfa. The THD value defined this way describes the performance of the operational amplifier used for the circuit but—as we show in this paper—it is not related to the distortion produced by the pseudoresistors at low frequencies. To our best knowledge, there has been no multichannel AC-coupled neural amplifier described in the literature with low distortion (~1% THD or less) reported consistently for the complete range of frequencies of extracellular neuronal signals.
In this paper we discuss an improved tunable AC-coupling architecture for CMOS neural amplifiers, based on pseudoresistors built from transistors working with fixed gate-source voltage, which yields low-distortion (~1%) for input signals ranging from 1 Hz to 10 kHz and with amplitudes up to 10 mVpp. Based on numerical simulations we describe in detail the mechanism of nonlinear distortion generation and scaling of the THD with the amplifier gain, the cutoff frequency setting, and sizing of the feedback transistors and input capacitors. We also discuss the impact of the AC coupling circuit parameters on the noise performance of the recording system and the noise-distortion design trade-off. Finally, we present results of post-layout simulations of an area-efficient neural preamplifier in an 180 nm PD-SOI technology for verification of the proposed AC coupling architecture at the level of complete integrated circuit.
4. Noise Contribution of the AC-Coupling Circuit
Since a neural amplifier must be capable of recording signals with amplitudes down to tens of µV with good SNR, noise performance is a critical aspect of the design [
15]. In this context, the noise contribution of the resistive elements of the AC coupling circuit must be carefully analyzed.
The results presented in this section are based on simulations of circuit shown in
Figure 1a, with ideal operational amplifier and ideal resistors. This way, the thermal noise of the resistors is analyzed in separation from other sources of noise associated with the pseudoresistors (like flicker noise) or with the operational amplifier. In the
Section 5 we discuss noise and nonlinear distortion based on simulations taking advantage of pseudoresistor built from PMOS transistors.
We start with analyzing the noise contribution from the feedback resistor
Rfa (compare
Figure 1a). At this point we assume the non-inverting input is at virtual ground, therefore the noise measured across the
Rfa is equivalent to the noise contribution of this resistor measured at the output of the circuit. The total rms voltage noise of this resistor is:
and is independent of the
Rfa value and the cutoff frequency. However, this value comes from integration of power spectral density (PSD) curve from 0 to infinity. In order to quantify noise level in the defined frequency range, we need to look closer at the noise spectrum.
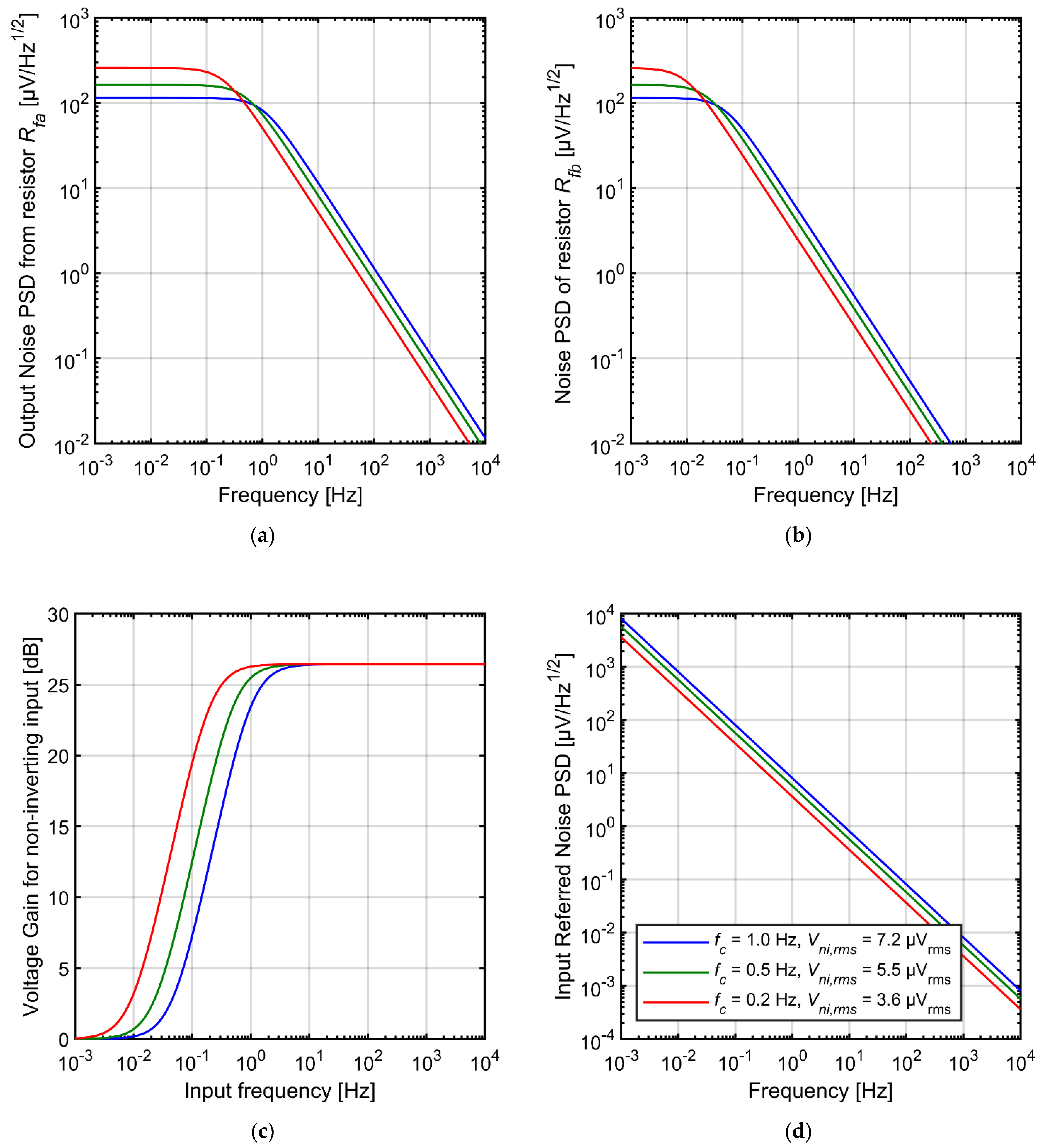
In
Figure 7a we present the PSDs of the noise contributed by
Rfa. The PSDs are shown at the amplifier output for various values of the cutoff frequency of the AC-coupling circuit. Although the tuning does not change the total rms noise, it shapes the noise spectrum. Therefore, the noise in the frequency range of interest can be reduced by shifting the cutoff frequency below this range; this is discussed in more detail later in this section.
In order to explain the noise contribution of the resistor
Rfb, we analyzed the PSD of its thermal noise (measured across the resistor itself) and the transmittance of the complete circuit with respect to signals that appear at the noninverting input of the operational amplifier U1 (compare
Figure 1a). The plots are shown in
Figure 7b,c. Since the resistor
Rfb is shunted with large capacitance (
Cinb + Cfb) the PSD values for most of the frequency range are much lower than those shown in
Figure 7a. On the other hand, the 1/
f dependence is extended toward lower frequencies as the time constant has a large value of
Rfb × (Cin + Cfb). For extremely low frequencies (below 0.1 Hz) the PSD values of the curves shown in
Figure 7a,b become identical. At the same time, the circuit transmittance for this noise is equal to 1 at the very low frequencies and equalizes at value
(Cina + Cfa)/Cfa for higher frequencies. Multiplication of the respective curves shown in
Figure 7b,c results in the output noise PSDs characteristics that are identical to that presented in
Figure 7a. We conclude that the resistors
Rfa and
Rfb have identical impact on the noise performance of the circuit, both in terms of noise PSDs and the rms values.
The input-referred noise rms values calculated in 1 Hz–10 kHz frequency range are given in
Table 1. One way to reduce the noise contribution of the AC-coupling circuit in specific frequency range is to set very low cutoff frequency. Some designs take advantage on this by shorting the gate and the source of the pseudoresistors, which leads to very large resistances of
Rfa and
Rfb. Such a solution will result in extremely low cutoff frequency in the range of tens of mHz or even lower and greatly reduced noise from feedback resistors above 1 Hz. Unfortunately, such filters do not remove the very slow and large-amplitude drifts of the electrode voltage from the signal, and this can lead to saturation of the recording amplifier. For this reason some users prefer circuits with tunable cutoff frequency which is set closer to the frequency range used for analyses, as discussed in the Introduction. Nevertheless, careful optimization of the filter time constant for specific experimental conditions may potentially be very useful in reducing the system noise.
The noise can be also reduced by decreasing the feedback capacitance
Cfa and consequently increasing the preamplifier gain (
Table 1). We speculate that for this reason virtually all the reported CMOS neural amplifiers use higher gain of the first amplification stage than the circuit proposed in this work. However, as increasing the gain results in higher voltage drop across the feedback resistor
Rfa, it is expected that the side effect of such a solution will be higher signal distortion, particularly for large input signals. We provide more detailed discussion on distortion-vs-noise trade-off in
Section 5.
Finally, an easy way to reduce the noise level is to increase the values of capacitors
Cina,
Cinb,
Cfa and
Cfb (
Table 1). Unfortunately, this comes at the price of circuit area. In reality, the total silicon area of many reported neural amplifiers is primarily defined by the capacitors—namely, both the input capacitors
Cina and
Cinb (
Figure 1). For design aiming for a compact amplifier footprint the capacitances must be kept as small as possible.
The analysis presented in this section and the noise values given in
Table 1 lead to conclusion that that the proposed design parameters (
Cina = Cinb = 4 pF,
Cfa = Cfb = 200 fF,
K = 20) should allow for reasonably good noise performance, comparable with advanced multichannel neural amplifiers reported in the literature [
10,
28]. At the same time, the moderate gain value
K = 20 V/V should help keeping the level of distortion under control. We therefore accept these parameters as the starting point for the following detailed analysis of the circuit distortion.
5. Design for Low Distortion, Low Noise and Small Silicon Area
In
Section 3 we described the mechanism of nonlinear distortion generation based on simulations of the circuit with nominal settings (
K = 20 V/V,
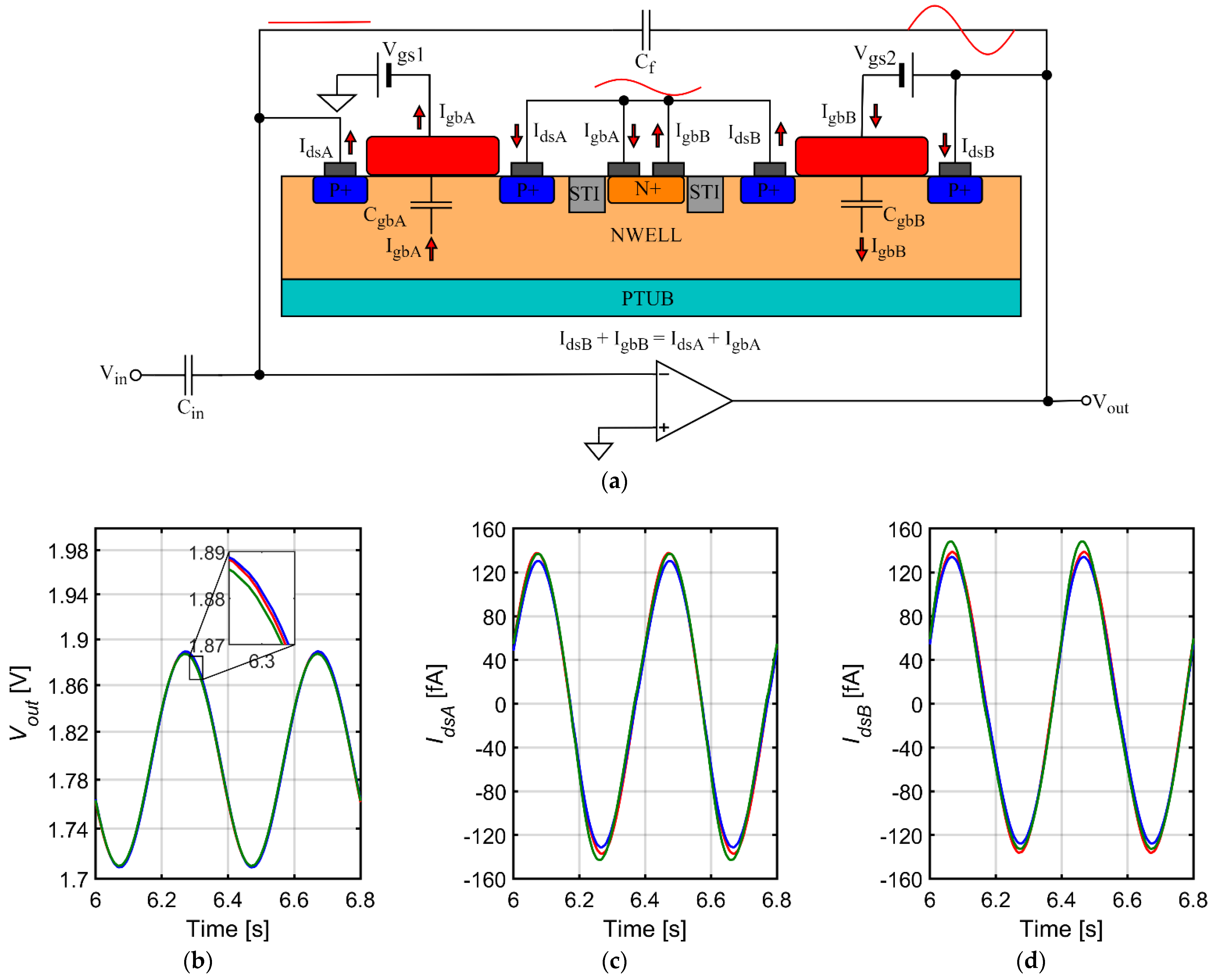
Cin = 4 pF, cutoff frequency = 1 Hz). In this section we analyze how changing of these parameters affects the THD values and we discuss the distortion-noise trade-off. The results are based on simulations with an ideal operational amplifier so we can analyze distortion and noise introduced by the pseudoresistor decoupled from nonidealities of the operational amplifier itself. The pseudoresistors in these simulations are built from 5 V PMOS transistors (
W/L = 1 μm/40 μm). We note that the results of the noise analyses presented here may be slightly different than those presented in
Section 4, where only the thermal noise from an ideal resistor was considered; however, the conclusions given in
Section 4 are sufficient to explain qualitatively the results presented here.
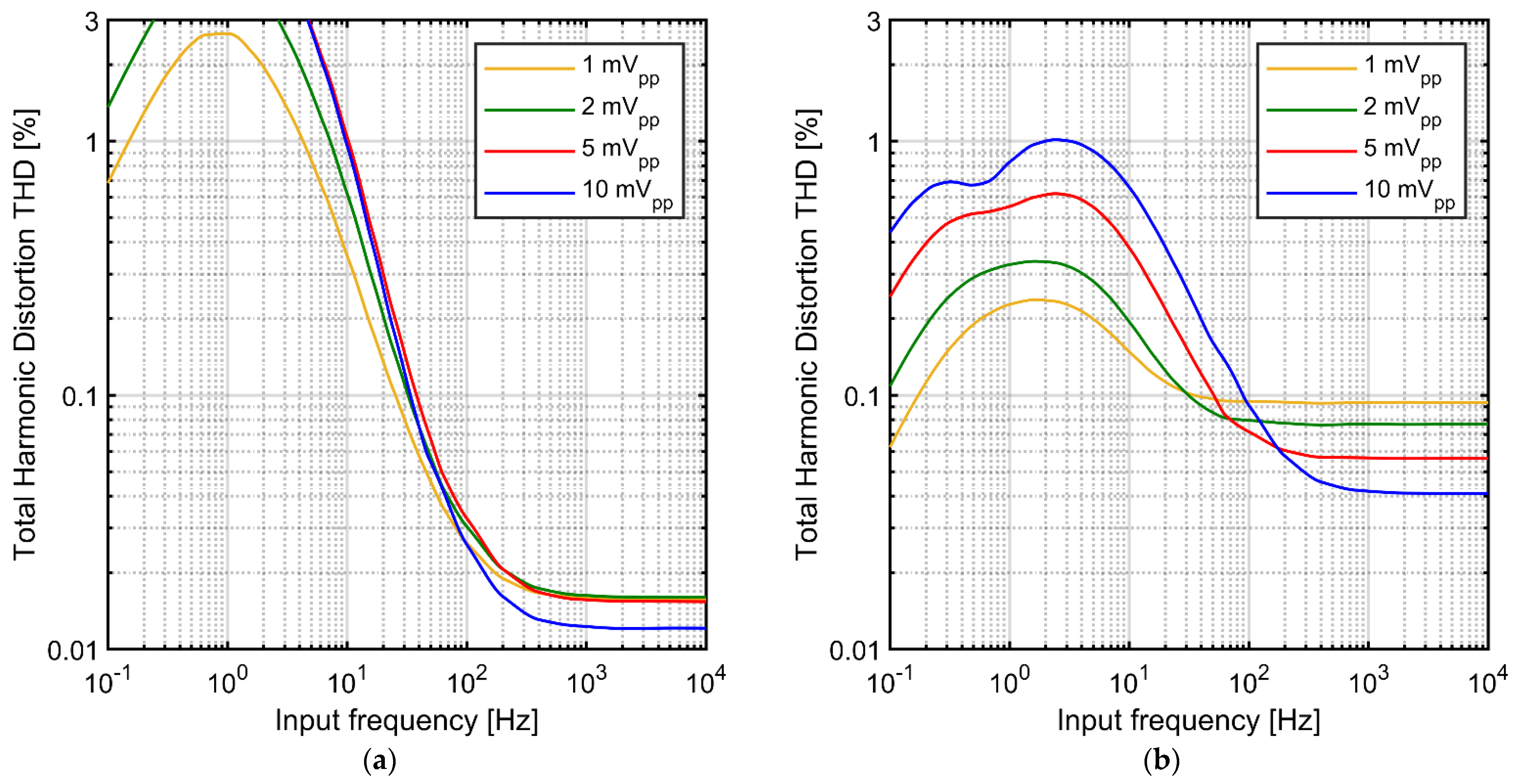
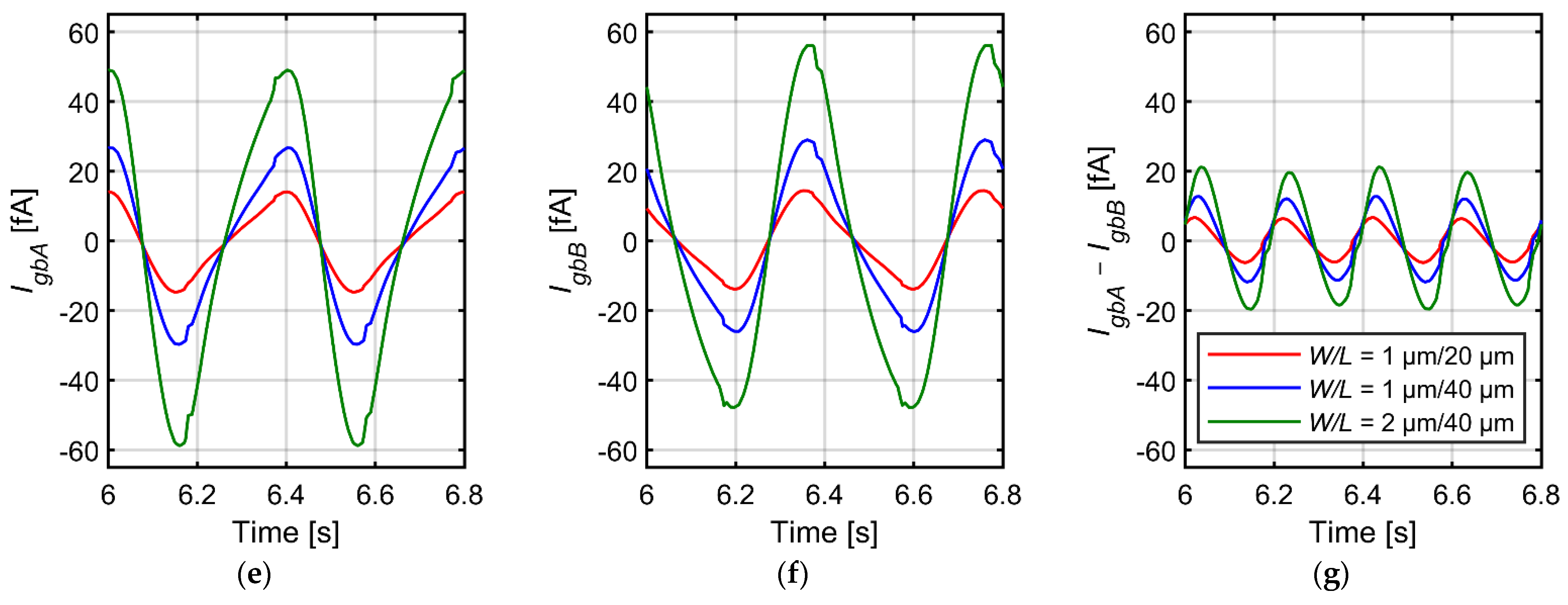
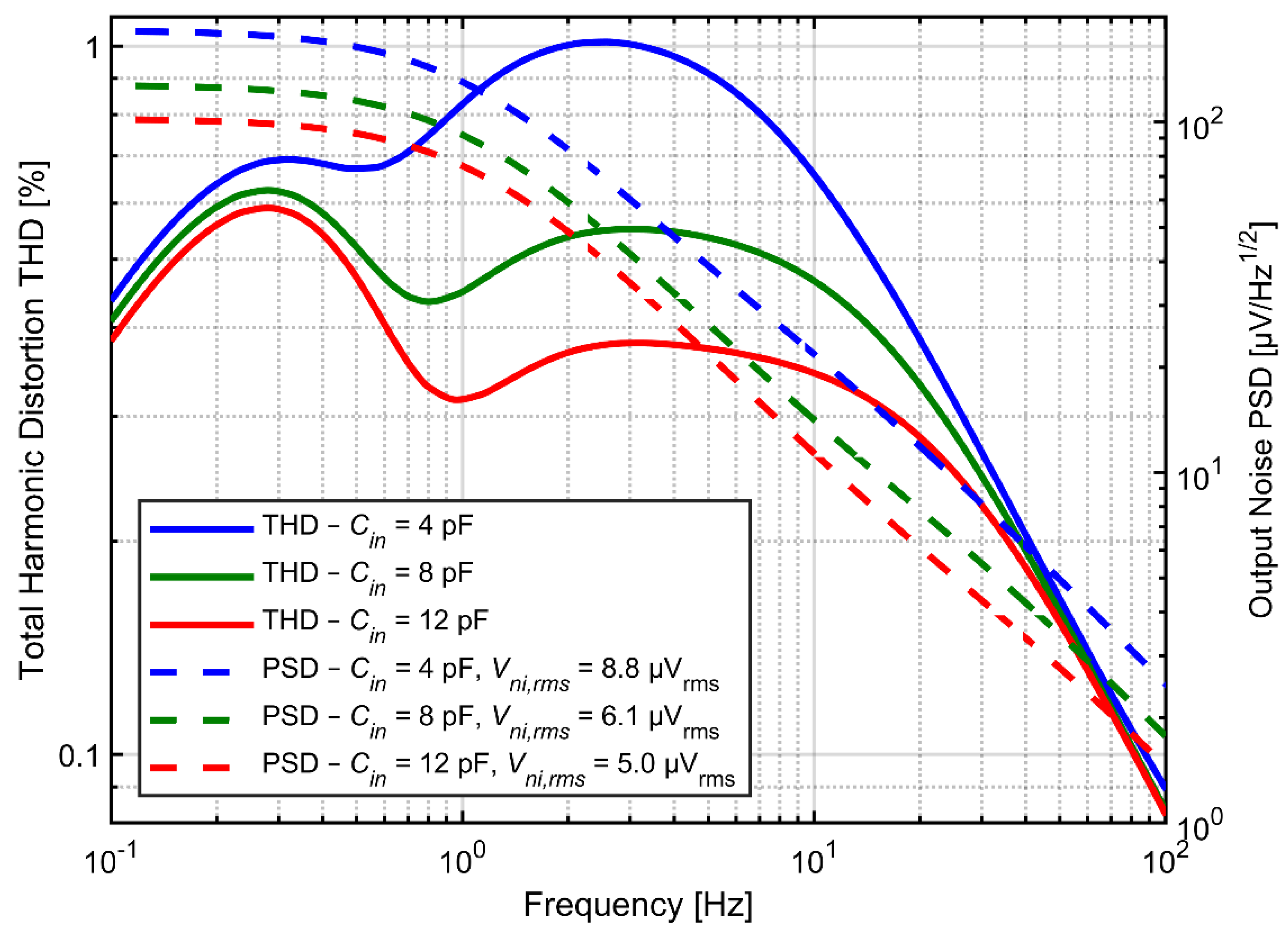
Figure 8 shows the noise PSD and the THD as a function of input signal frequency for various values of
Cin and
Cf but at fixed ratio
Cin/Cf = 20. Both the noise and distortion performance benefit from larger capacitors. Increasing the
Cf determines proportional decrease of the feedback resistance if the time constant of the high-pass filter is not expected to change. Obviously, the total current in the feedback loop increases proportionally to the increase of capacitors. The same applies to current in capacitor
Cfa as well as to the drain-source currents of transistors forming the pseudoresistor (the ratio of drain-source current to current in
Cfa for given frequency does not change, since we assumed that the time constant did not change). At the same time the gate currents for transistors A and B (
Figure 4a) do not change (as both the gate capacitances and the gate-to-bulk voltages for these transistors do not change). In consequence the influence of the current
IgbB–IgbA on the drain-source currents is reduced and the second peak in THD curves decreases, according to analysis presented in
Section 3.3. On the other hand, increasing of
Cfa and
Cina results automatically in reduction of thermal noise across both resistors
Rfa and
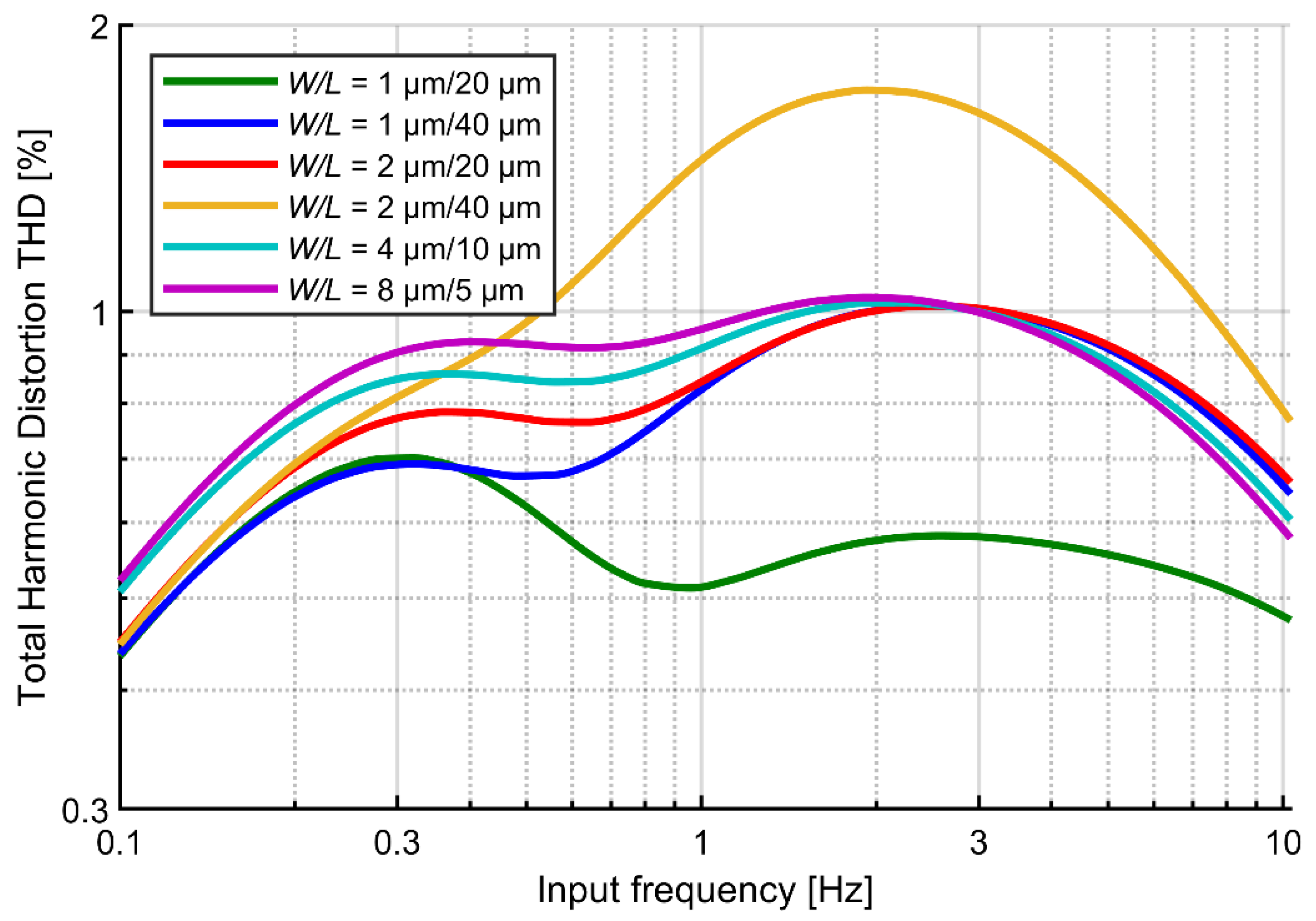
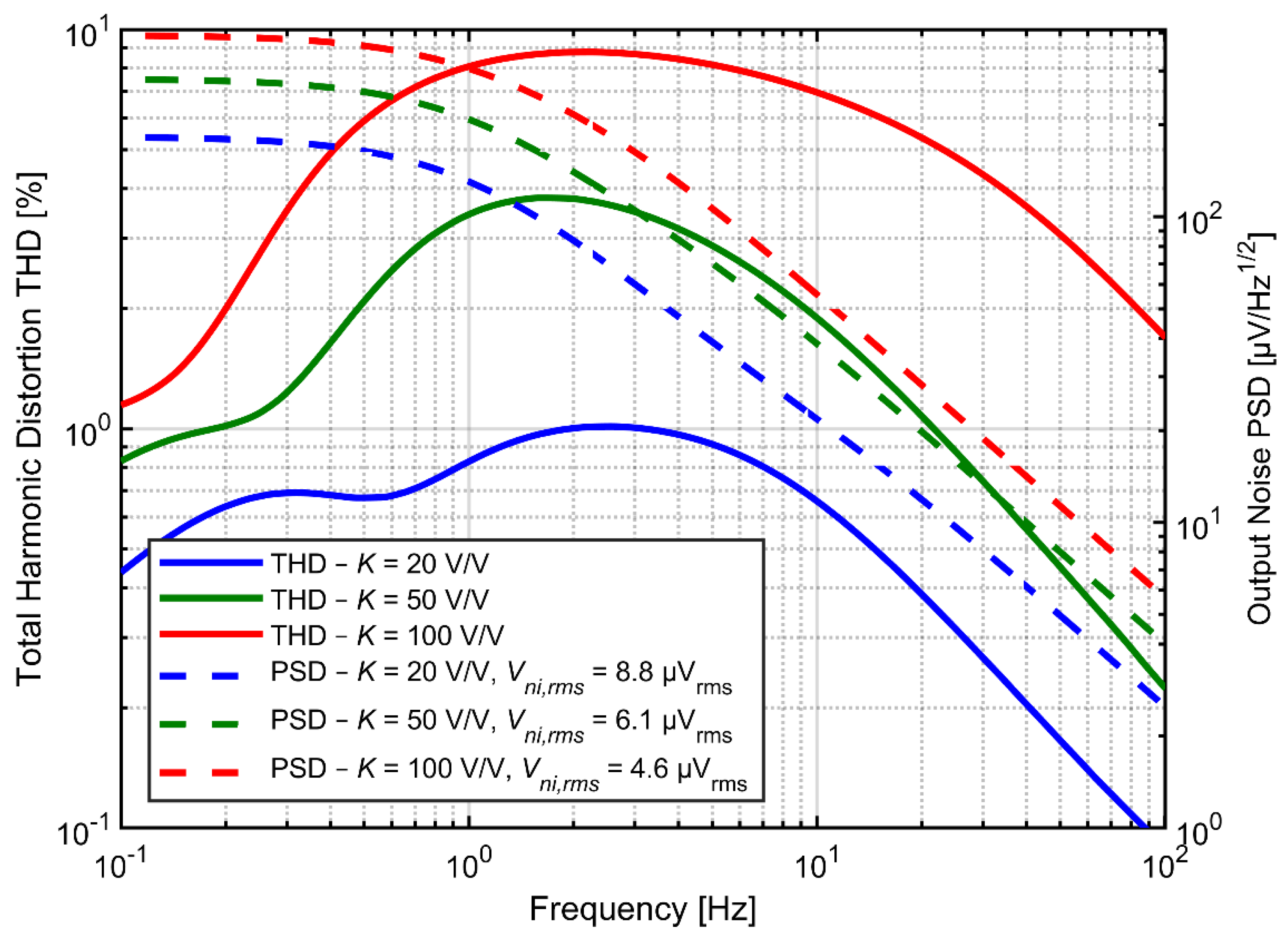
Rfb. Figure 9 presents the dependence of THD and noise spectrum on the amplifier gain. For the three gain settings the
Cin value was fixed at 4 pF and the
Cf value was set to 200, 80 or 40 fF for the gain of 20, 50 and 100 V/V, respectively. On the other hand, larger gain results in significant increase of the distortion, for two reasons. First, increased gain results in larger amplitudes of
Vout, for which the pseudoresistor linearity becomes much worse; this effect is visible in the DC I-V curves in
Figure 2. Second, the distortion related to gate-bulk nonlinear currents are also expected to increase, since these currents increase accordingly with larger gate-bulk voltages, and the total current in the feedback loop remains the same (as
Cin does not change). The end result is that the ratio of
IgbB–IgbA current to the drain-source currents is higher, and so are the THD values. On the other hand, since the noise rms is inversely proportional to the square-root of
Cf and the gain is inversely proportional to
Cf, the input-referred noise from the feedback resistor is lower if
Cf is reduced. We conclude that for designs with strict limits on the silicon area, when
Cin must be kept small, the gain of the preamplifier should be optimized for specific application in order to get the best compromise between noise and distortion values.
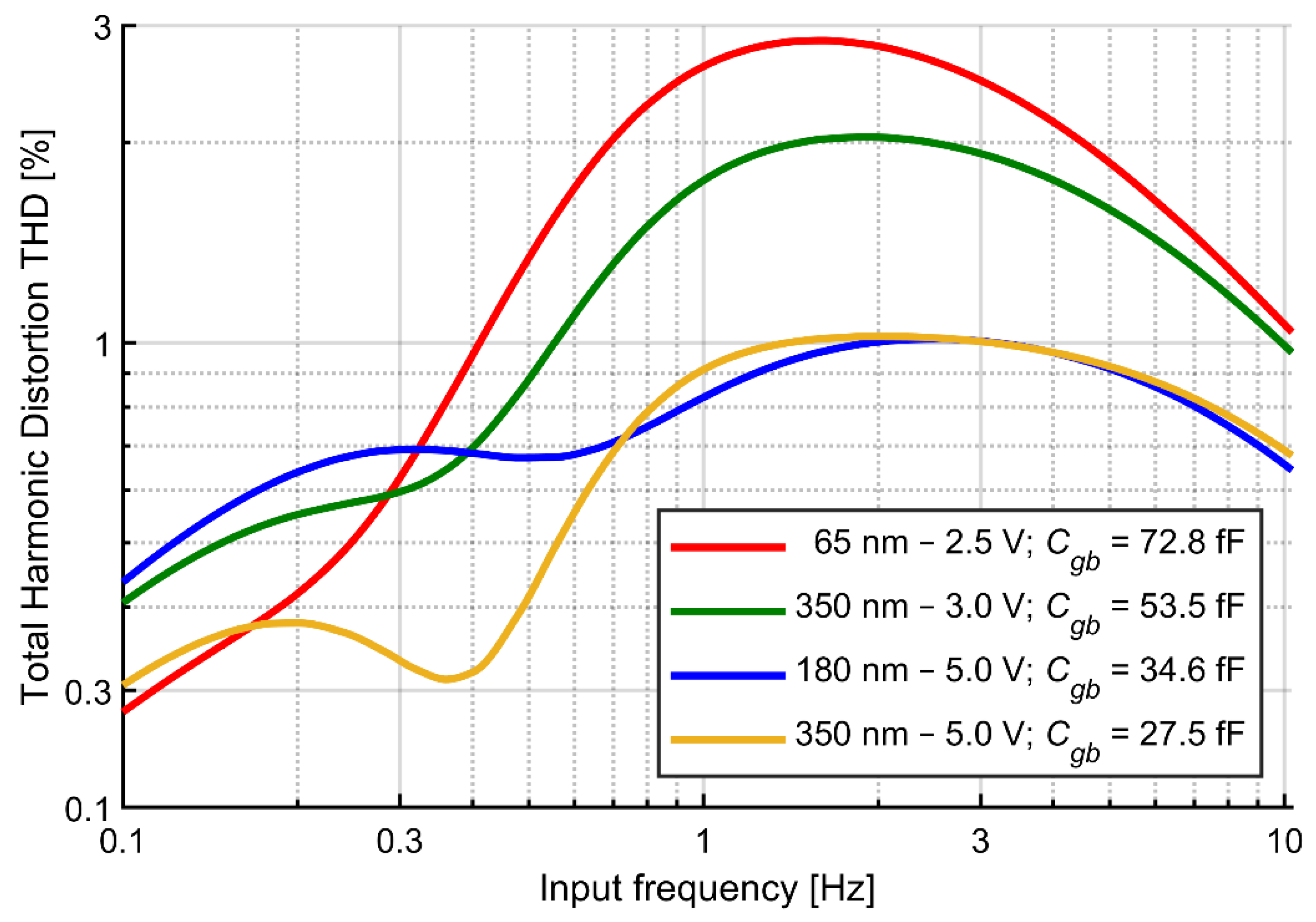
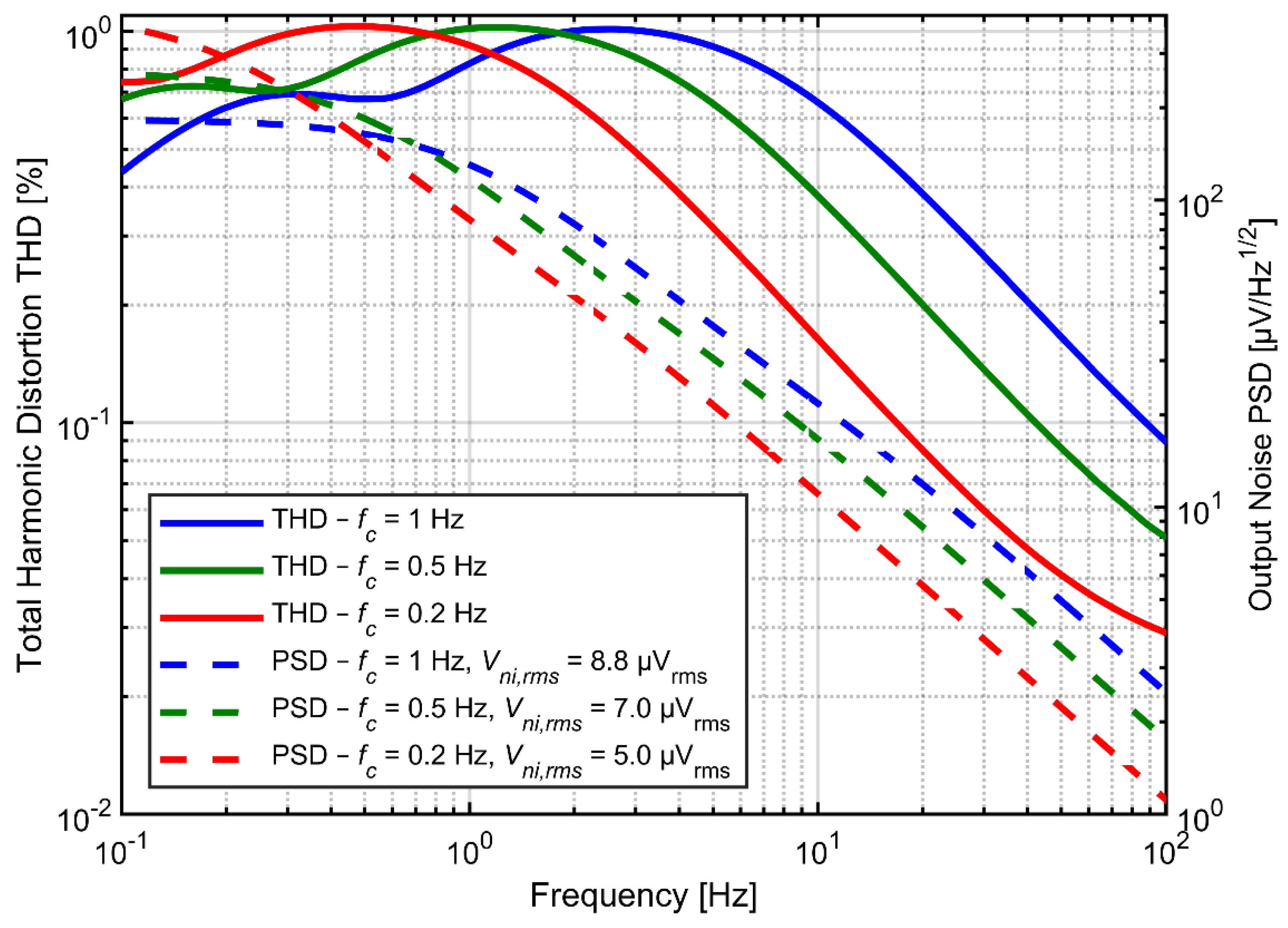
Tunable AC coupling circuit provides the opportunity to shape the spectrum of noise and distortion. One can shift the maxima of the THD curve out of the frequency range of interest by lowering the cutoff frequency (
Figure 10). However, the low frequency signal components can still generate harmonics leaking into higher frequency range and can modulate higher-frequency signals due to circuit nonlinearities. It is therefore difficult to analyze the profit of the cutoff frequency decrease on the output signal distortion without knowing the spectrum of the input signal, and in particular, the power of very slow (out‑of‑band) oscillations of the electrode voltage. The positive effect of lowering the cutoff frequency on the noise measured above 1 Hz is straightforward, as shown in
Figure 10.
6. Complete Preamplifier Design
In order to verify results of our analyses in practical circuit we designed a complete neural preamplifier based on the AC coupling architecture discussed above.
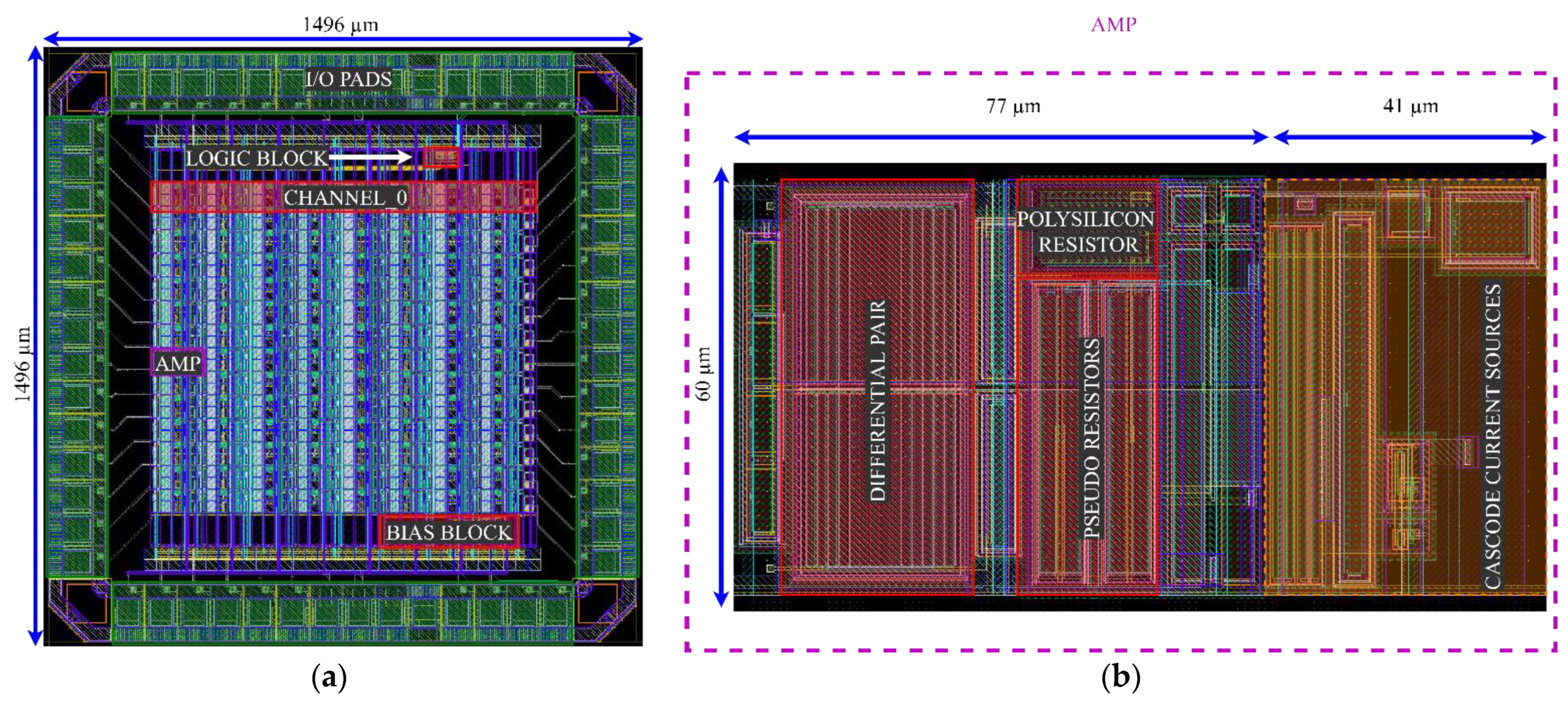
Figure 11a presents the block diagram of the preamplifier. We note that the
Vgs voltage that tunes the feedback resistance is generated differently for transistors A and B. Since the source of transistor A is at virtual ground, the gate potential of transistor A can be generated off‑channel and shared between all the channels of the ASIC.
The gate potential of transistor B must be shifted by a constant value (
Vgs) from the output voltage of the amplifier. This can be easily realized by integrating a single resistor into the amplifier, as shown in
Figure 11b, and taking advantage of the bias current of transistor M2 to generate the
Vgs. The required
Vgs values are on the order of 250–400 mV (see below) so assuming the bias current of ~1 µA, the value of resistor R must be in the range of several hundreds of kΩ. Such values can be easily realized using a polysilicon resistors that typically have resistivity of a few kΩ per square (6.6 kΩ per square in case of process used in this work). Due to excellent linearity and matching properties of the polysilicon resistors, the proposed method for generation of
Vgs value may be preferable to alternative solutions based on transistor-based voltage shifter [
31]. Although tuning of the feedback resistance requires changing of the bias current which affects the thermal noise of the preamplifier (contributed mostly by transistors M
3 and M
4 in
Figure 11b), this effect is negligible. The cutoff frequency scales exponentially with
Vgs and can be shifted by an order of magnitude from its nominal value (1 Hz) with changing the bias current by ~25%. This results in a change of the thermal noise of transistors M
3 and M
4 by only ~12%.
For the design of the test integrated circuit we decoupled the controls of bias current and cutoff frequency, as shown in
Figure 11c. This will allow us to measure the noise contribution of the amplifier as a function of bias current without changing the cutoff frequency. The current flowing through the polysilicon resistor is generated by cascode current sources. We used the resistor of 1 MΩ and the current of 315 nA is necessary to set the cutoff frequency to 1 Hz. For the design of the preamplifier we used the telescopic cascode architecture. Because the amplifier is designed for bidirectional neural interfaces with electrical stimulation capability, we plan to use relatively high supply voltage (3.0–3.6 V) for which the telescopic cascode architecture offers the best noise/power performance [
37] and provides enough voltage headroom for the ±200 mV
pp ac voltage swing. The supply voltage for the simulations was set at ±1.8 V with respect to ground.
Figure 12 shows the layout of the test integrated circuit. The chip includes 14 identical channels. Each channel includes eight versions of the preamplifier differentiated by the sizing of the pseudoresistors (four versions with
W/L respectively: 2 μm/40 μm, 1 μm/40 μm, 2 μm/20 μm, 1 μm/20 μm) and capacitors
Cin/Cf (two versions: 4 pF/200 fF and 8 pF/400 fF). The design of the operational amplifier is identical for all 8 versions. The bias current and
Vgs are controlled externally. The design was submitted to fabrication and the detailed measurements report will be published separately.
The results of noise simulations are presented in
Figure 13 and
Table 2. The total noise is dominated by the pseudoresistors in the LFP range (1–300 Hz) and by the preamplifier noise in the AP range (300 Hz–10 kHz). For both frequency ranges the noise on the order of 6 µV
rms is achievable. The results of post-layout simulations are perfectly consistent with simulations based on the schematics.
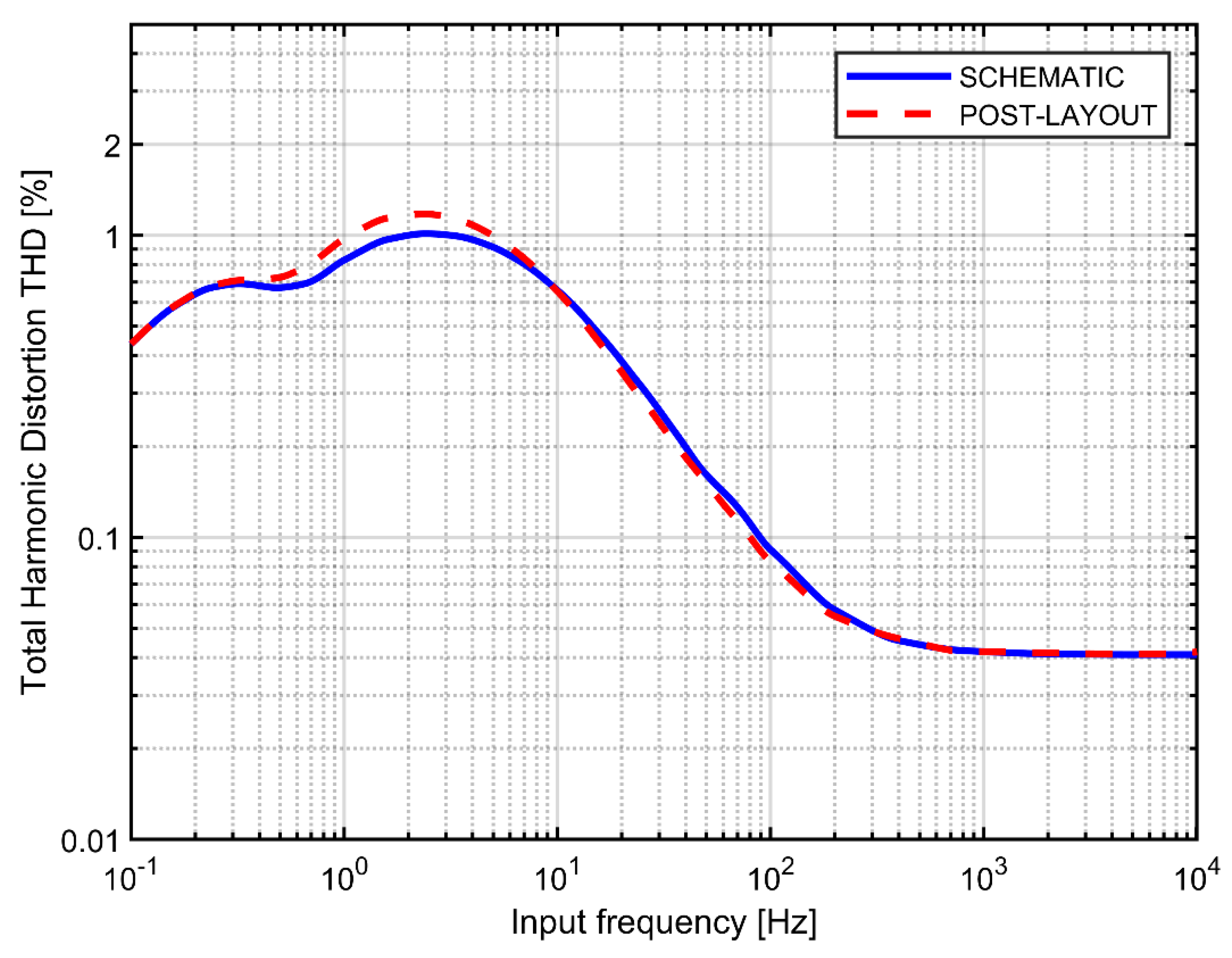
In
Figure 14 we compare the post-layout simulations of the THD-vs-frequency characteristic of the circuit presented in
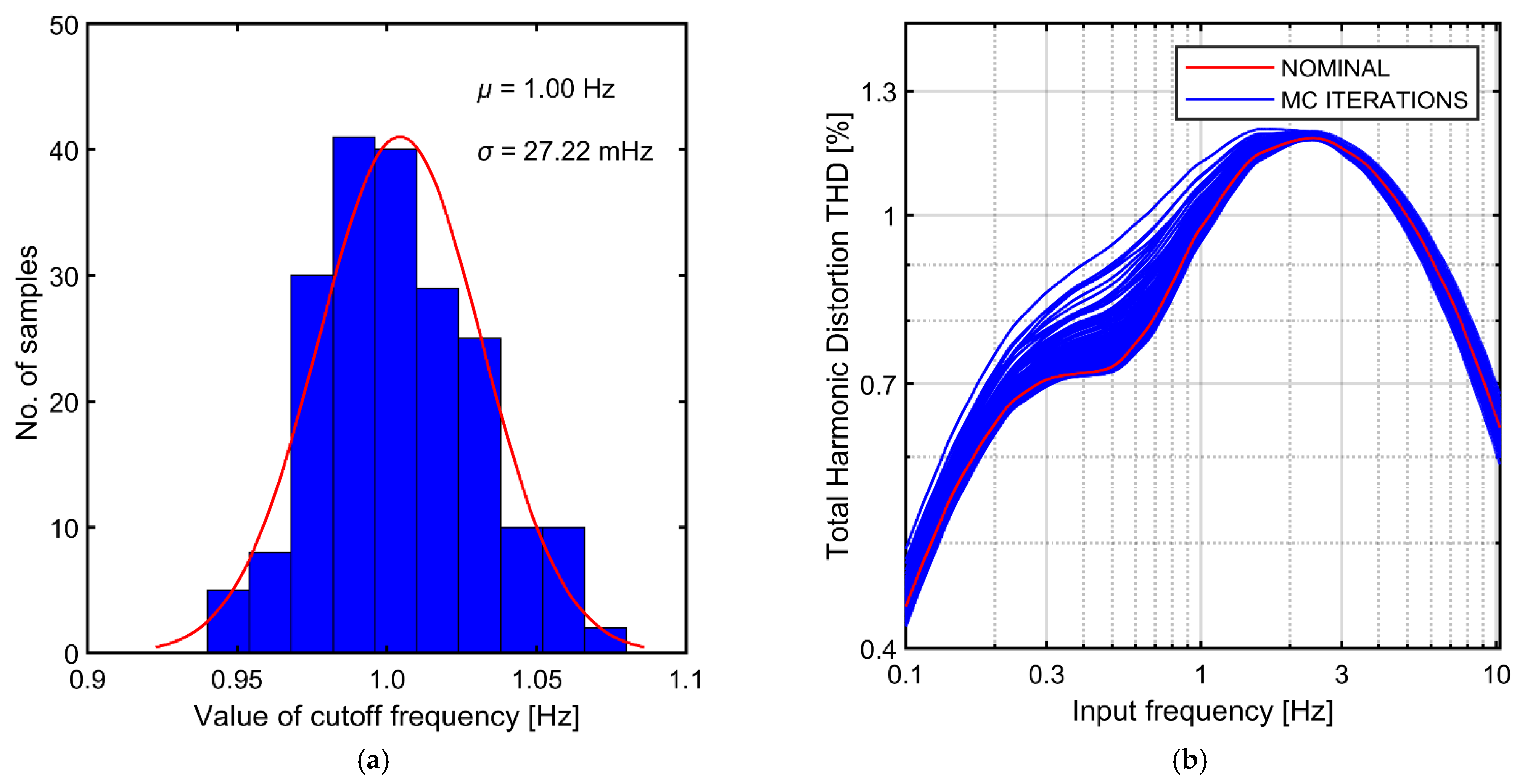
Figure 11c with schematic-based simulations of the circuit based on an ideal operational amplifier (discussed in the previous sections). The post-layout results show slightly higher THD peak at around 2.5 Hz (1.17% vs. 1.01%); otherwise the two graphs are very similar. Finally in
Figure 15 we present the results of post-layout Monte Carlo simulations of the THD curves. The transistors mismatch leads to slight increase of THD below the cutoff frequency, which is associated with perturbed symmetry of the I-V curve for positive and negative voltages. However, the peak at ~2.5 Hz that is responsible for the global maximum of the THD characteristic, is not affected by the mismatch.
The parameters of the test ASIC are given in
Table 3. The results suggest that the proposed circuit should be capable of providing the low-distortion amplification of full range of neuronal signals, with competitive noise and power figures and very small design area. However, small corrections of the preamplifier gain and/or absolute values of capacitors
Cin and
Cf may be necessary to meet the goal of <1% THD value for large signal amplitudes (10 mV
pp) and across complete range of signal frequencies. These considerations will be concluded based on detailed measurements of the test chip.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}