
Ambient and Wearable Sensor Technologies for Energy Expenditure Quantification of Ageing Adults

 , , , , and
, , , , and
Abstract
:1. Introduction
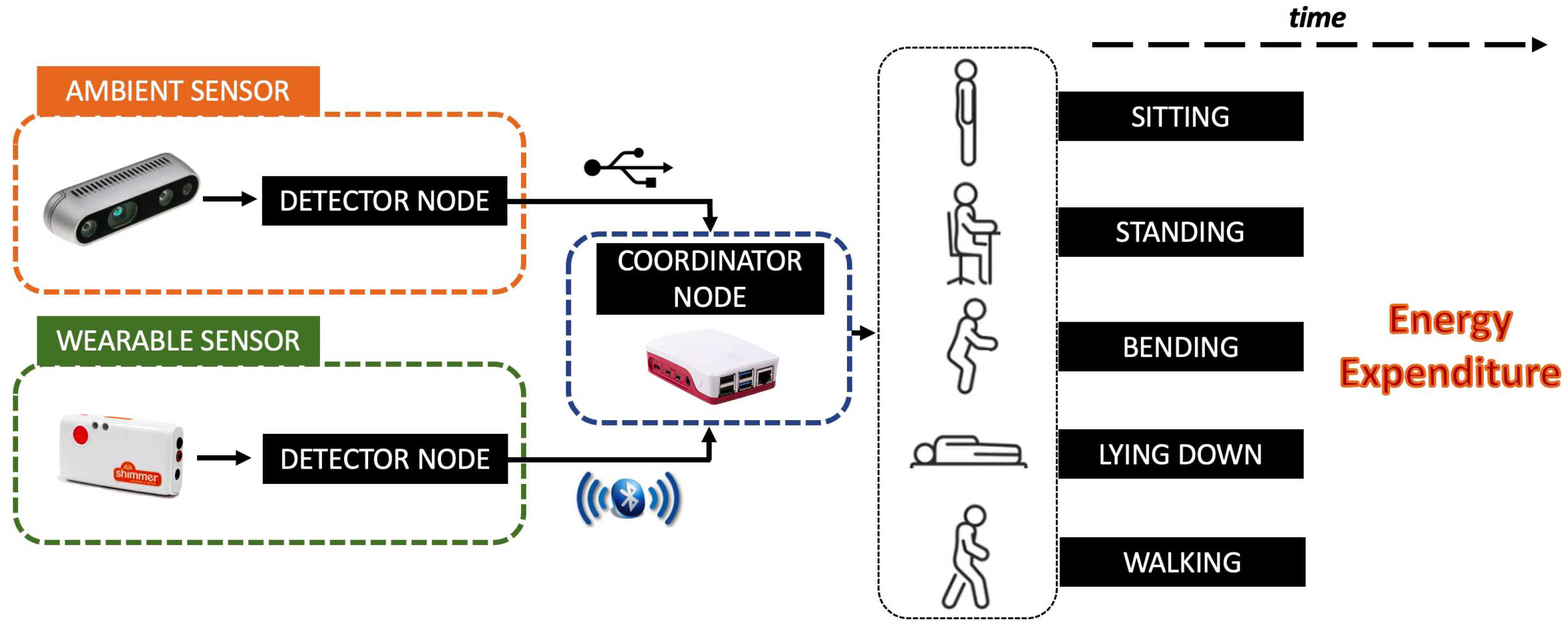
- An algorithmic framework for the classification of postures and walking activity using commercial ambient and wearable sensors is designed and implemented;
- A data fusion algorithmic block is implemented on a low-cost processing unit;
- Three different machine learning classification algorithms are compared to distinguish between posture and walking activitiy after data fusion;
- EE was objectively quantified for each end user through the time trend of the postures and the walking activity length via the lookup table of the corresponding MET values.
2. Related Work
3. Materials and Methods
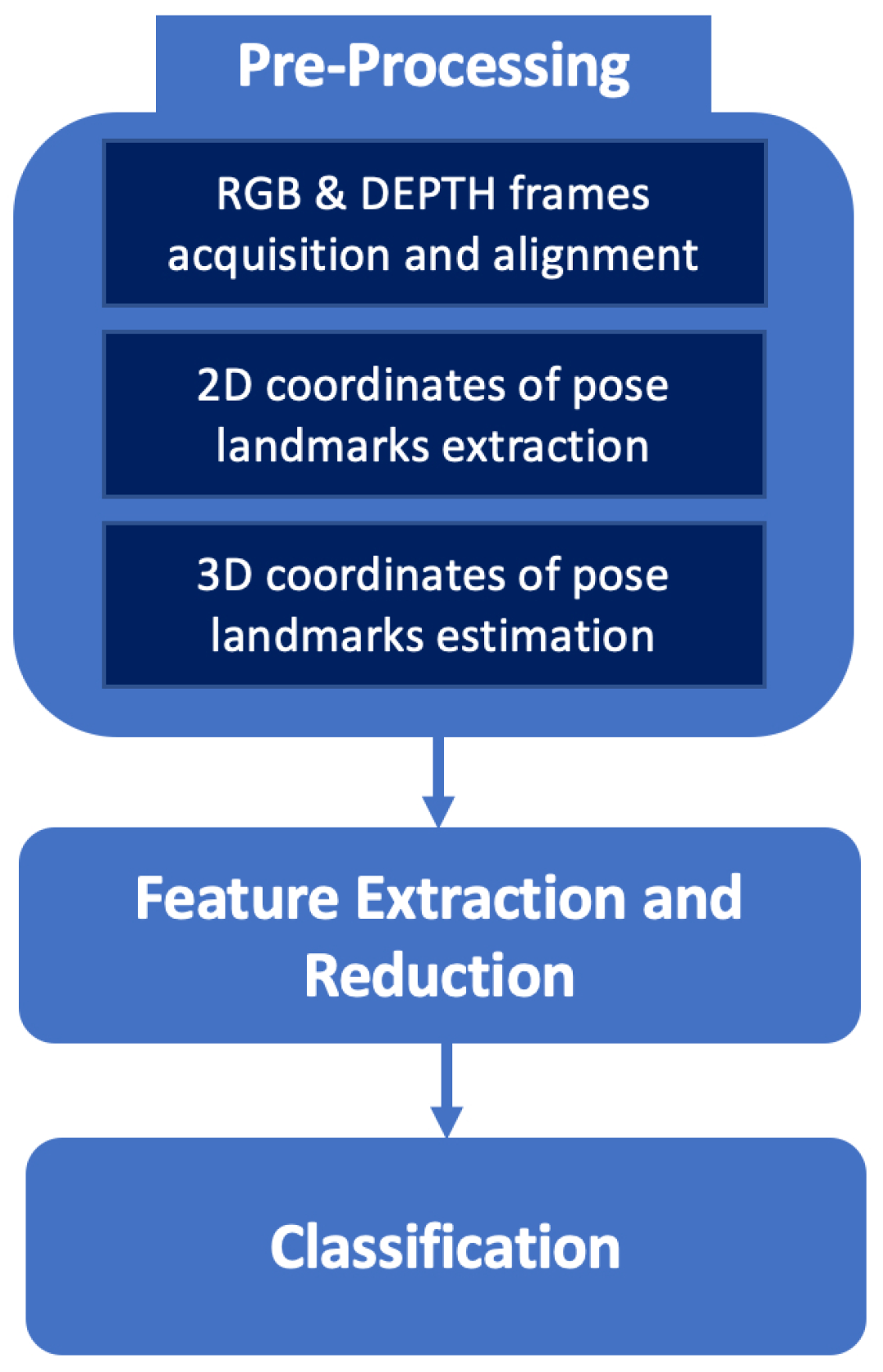
3.1. Computational Frameworks for Human Posture and Walking Activity Recognition
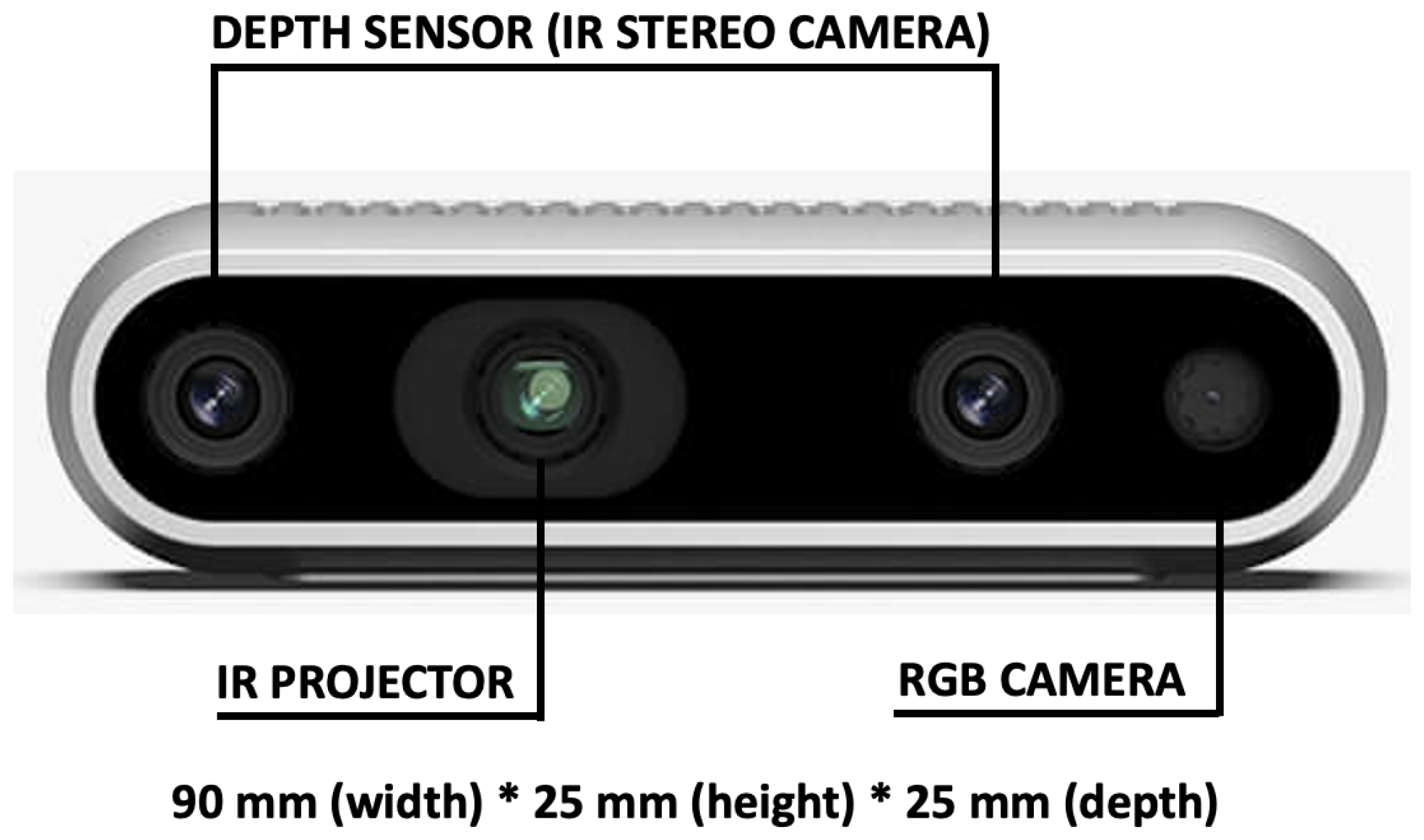
3.1.1. Ambient Sensor
- Acquisition of RGB and depth frame from the 3D camera and their alignment;
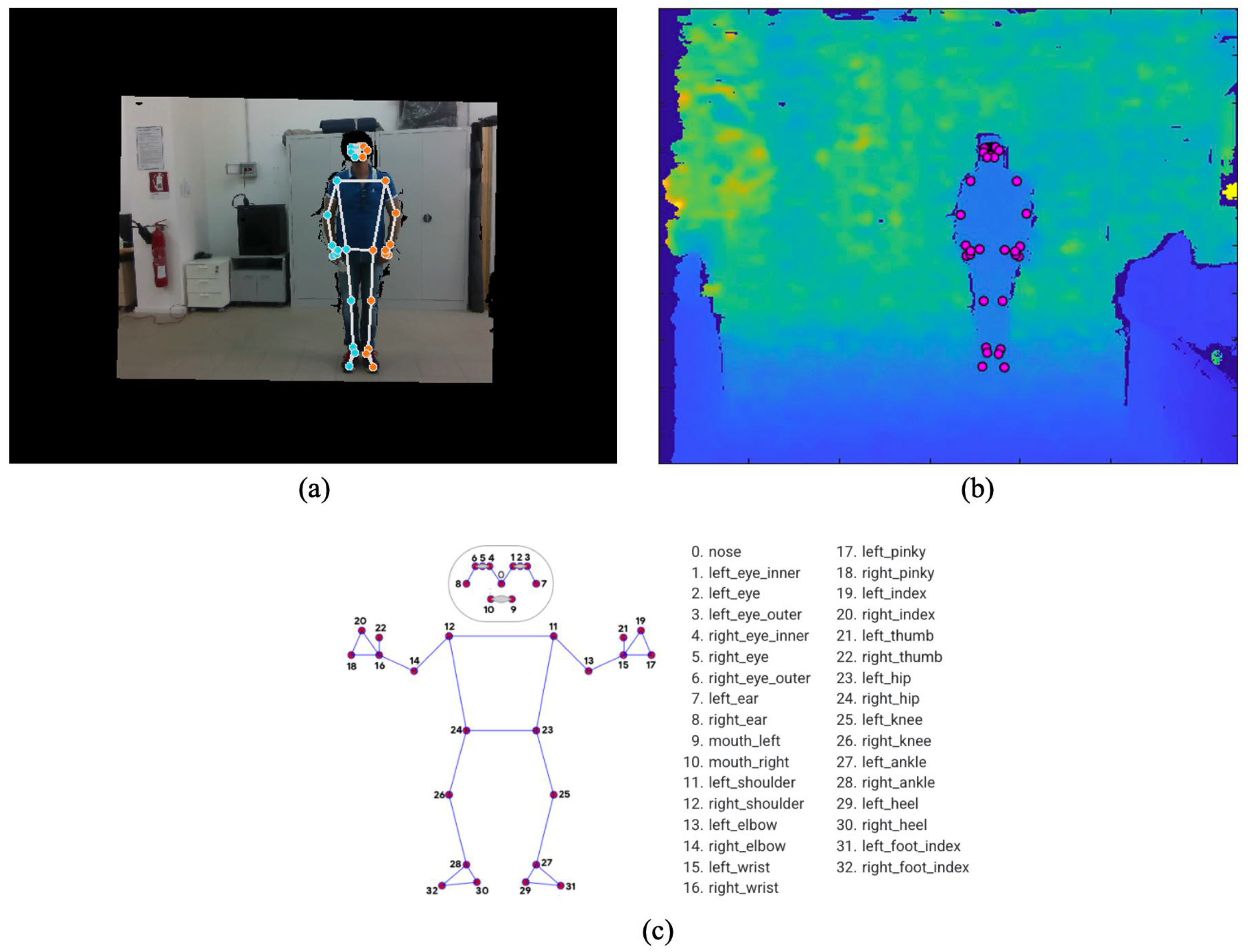
- Extraction of the pose landmarks from the RGB frame;
- Estimation of the 3D coordinates of the pose landmarks from the depth frame;
- Definition, extraction and reduction in postural features;
- Posture and walking activity classification.
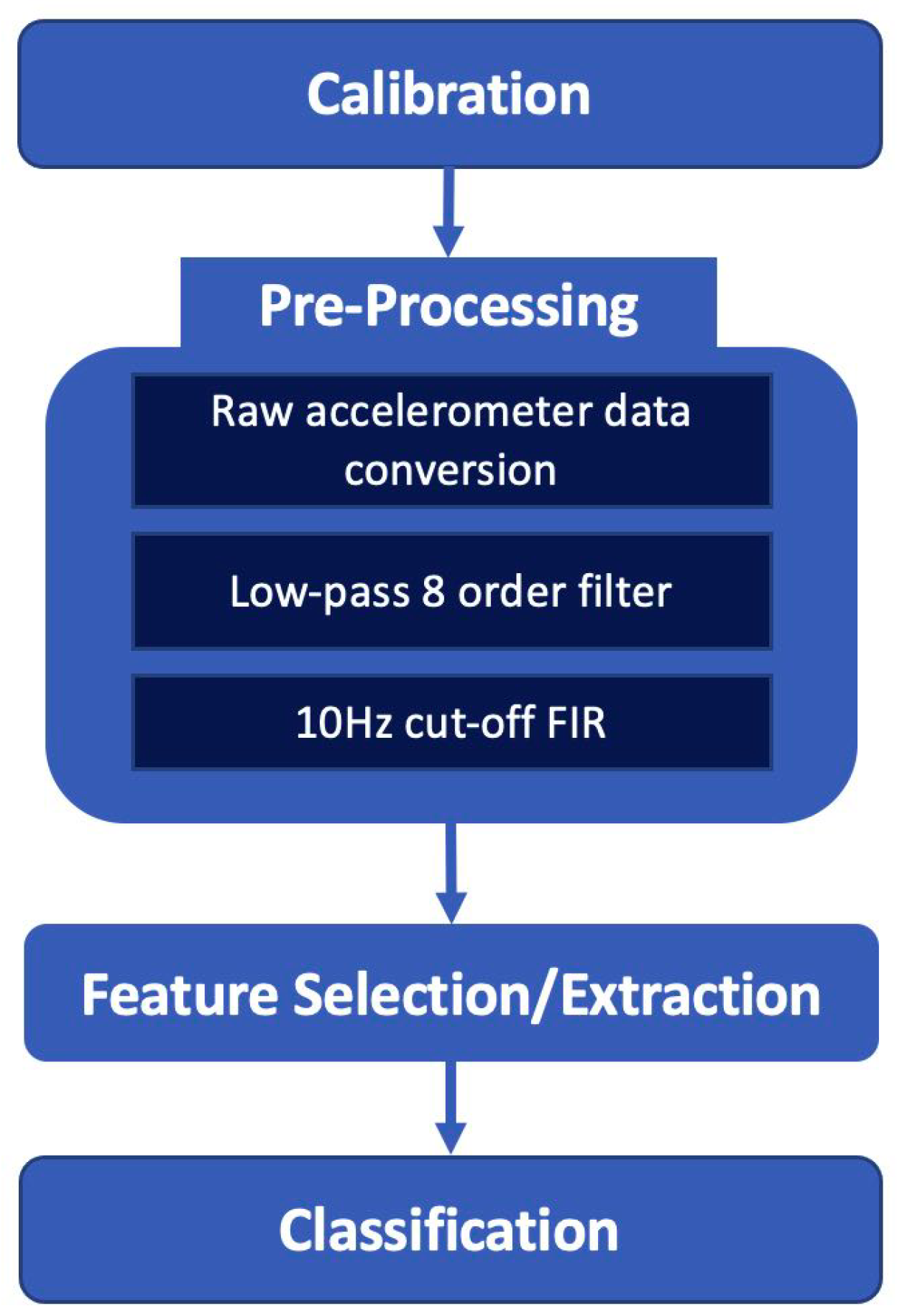
3.1.2. Wearable Sensor
- Tri-axial accelerometer;
- Magnetometer;
- Pressure and temperature sensor;
- Tri-axial gyroscope.
3.1.3. Elaboration Unit
3.1.4. Data Fusion
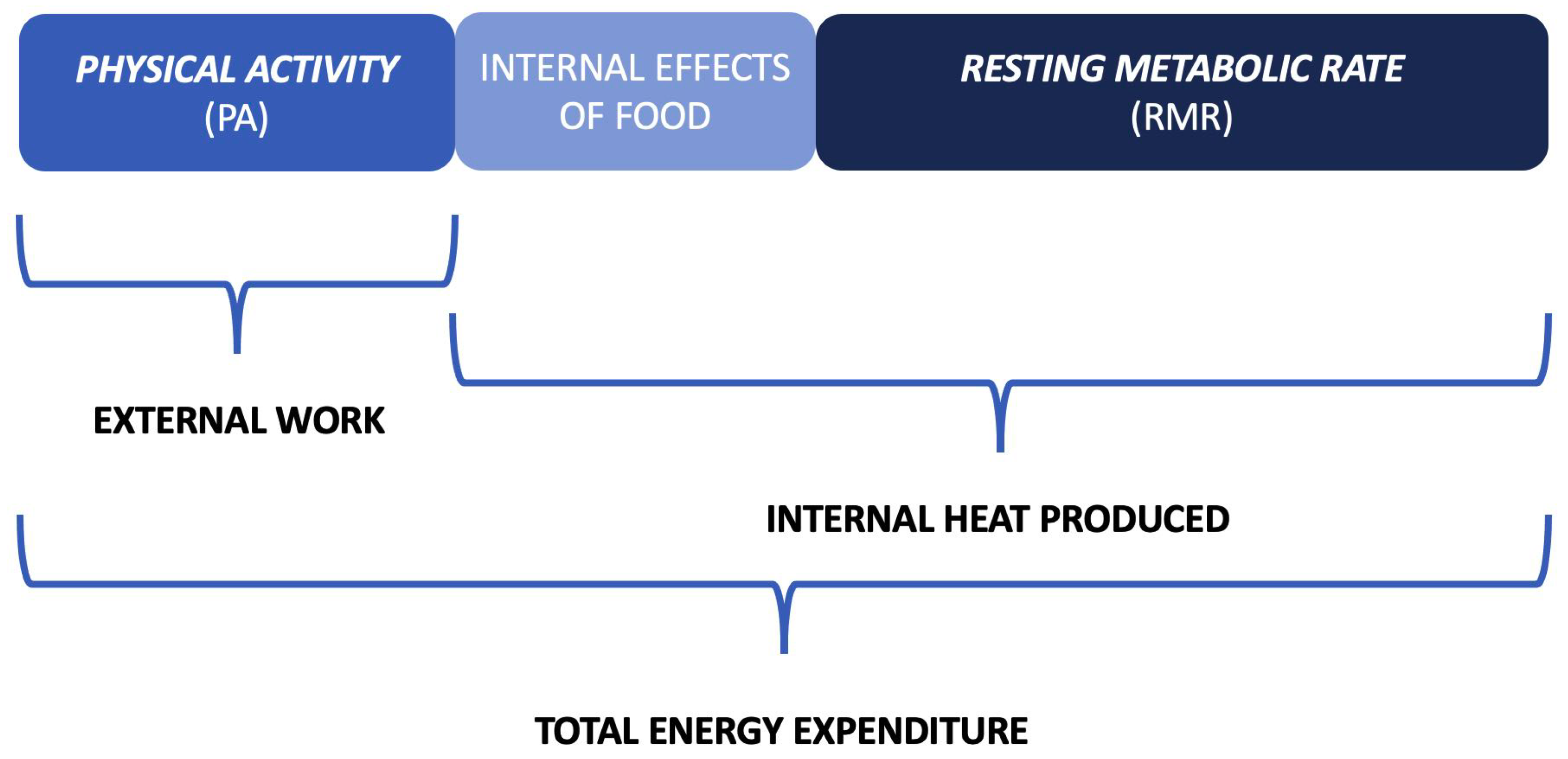
3.2. Methodology for EE Quantification
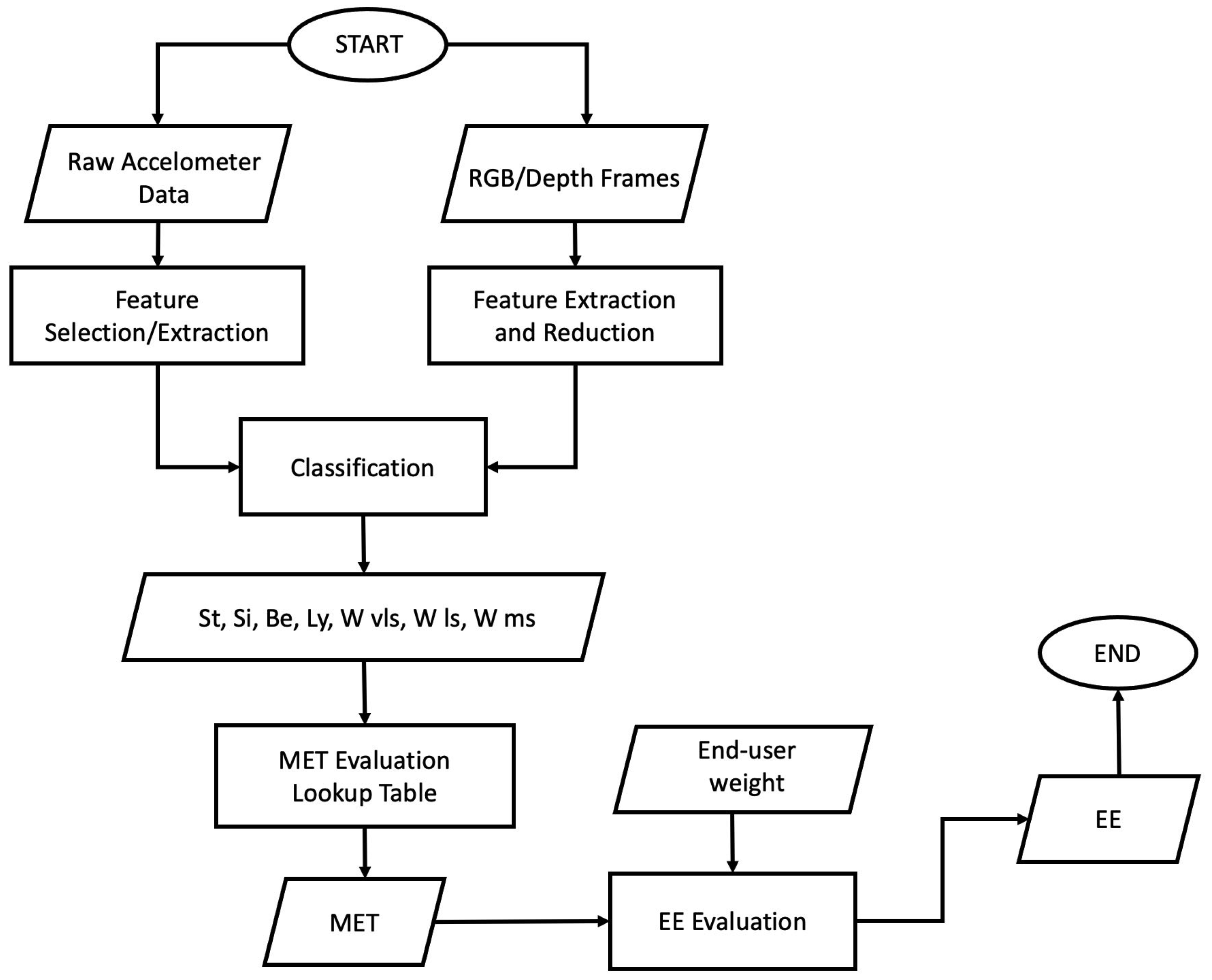
| Algorithm 1 Pseudocode of the Implemented Pipeline for EE Quantification |
| Input wearable sensor: (raw accelerometer data at time t) Input ambient sensor: RGB/DEPTH image at time t Input end-user weight: w Output: EE. 1: procedure WearableSensor 2: while window_calibration_lenght do 3: calibration() 4: end while 5: for each sliding window of lenght h do 6: for p do 7: preprocessing() 8: featureSelection/Extraction() 9: end for 10: end for 11: return wearable features 12: end procedure 13: Postures ← classification(wearable features) 14: procedure AmbientSensor 15: for each RGB/DEPTH image at time t do 16: RGB/DEPTHpreprocessing(RGB/DEPTH) 17: featureExtraction/Reduction(RGB/DEPTH) 18: end for 19: return ambient features 20: end procedure 21: Postures ← classification(ambient features) 22: procedure FeatureFusion 23: total_feature_set = wearable features + ambient features 24: end procedure 25: Postures ← classification(total_feature_set) 26: procedure EEQuantification 27: EE 28: for i (minutes) do 29: EE (Kcals) = EE 30: end for 31: return EE 32: end procedure |
4. Results
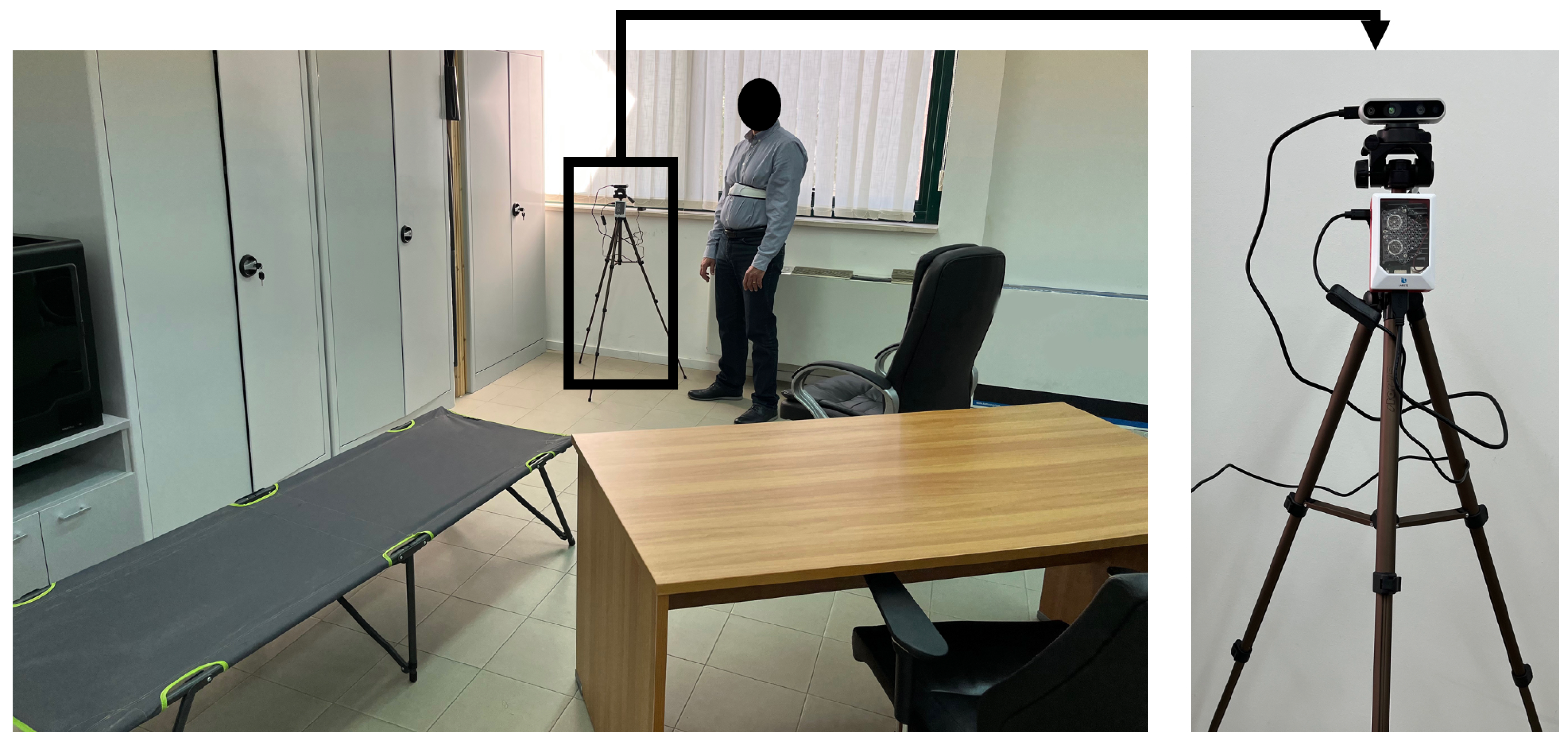
4.1. Participants, Experimental Setup and Protocols
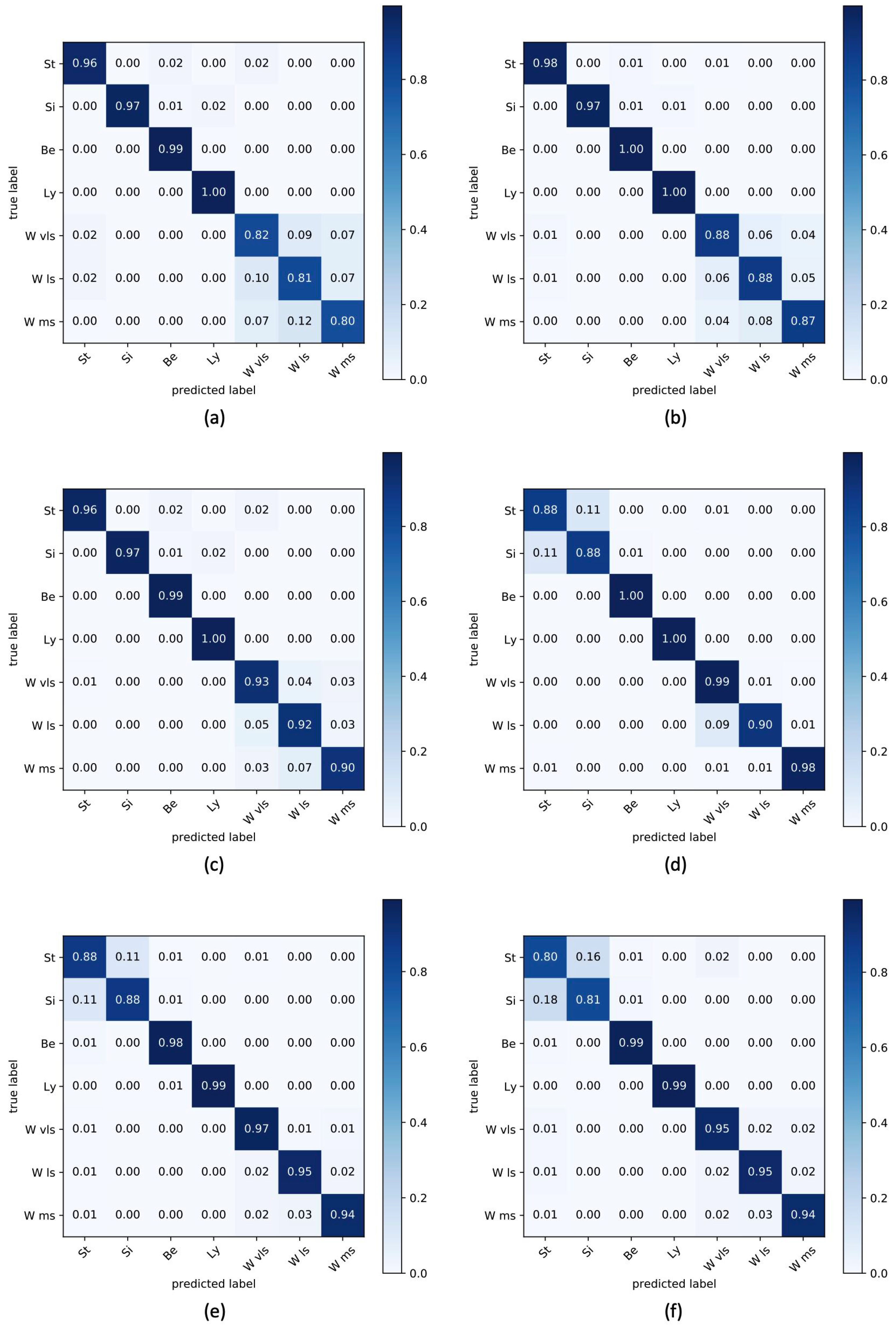
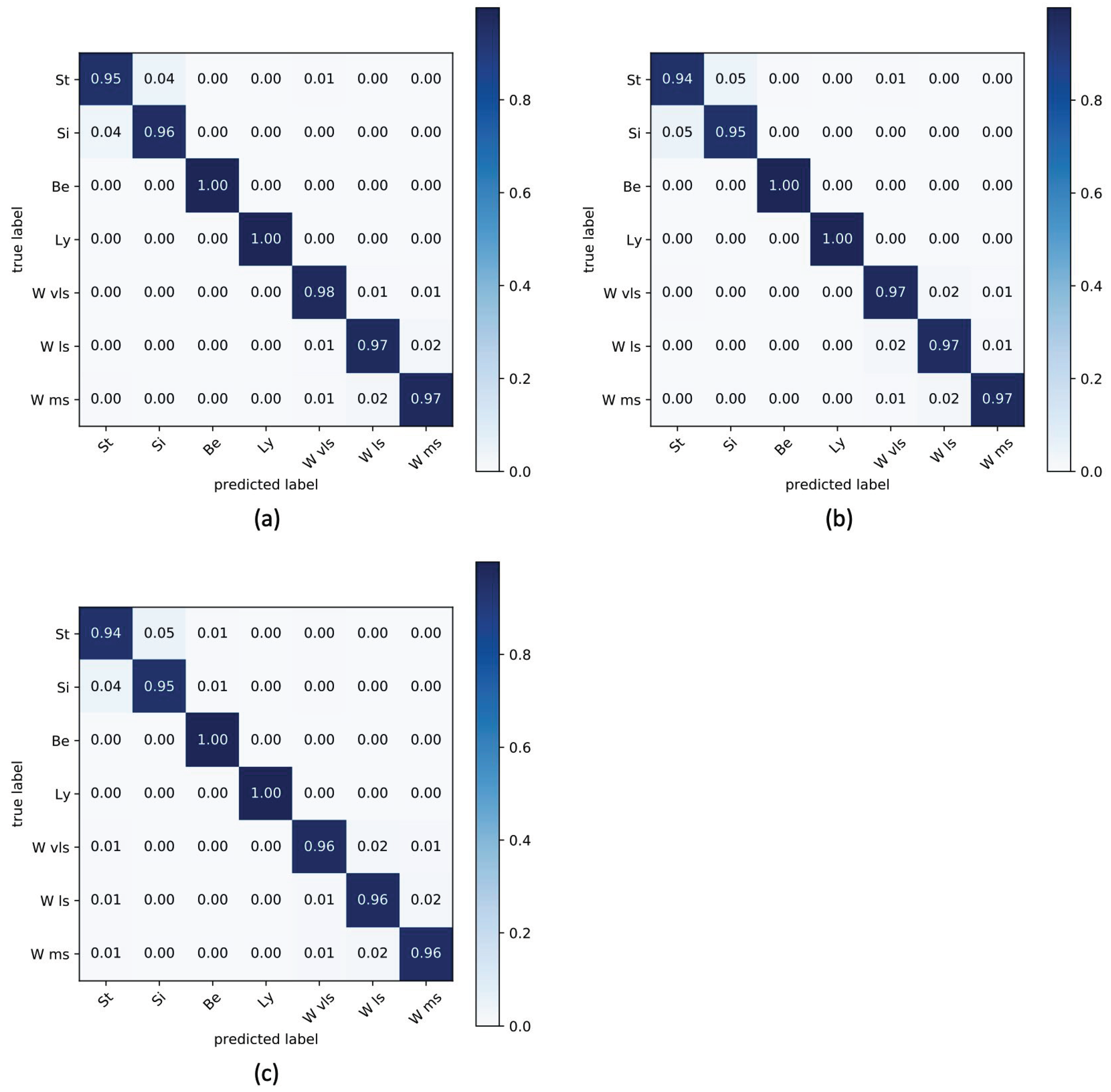
4.2. Classification Performance
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, W.; Goodkind, D.; Kowal, P.R. An Aging World: 2015. 2016. Available online: https://www.researchgate.net/profile/Paul-Kowal/publication/299528572_An_Aging_World_2015/links/56fd4be108ae17c8efaa1132/An-Aging-World-2015.pdf (accessed on 18 April 2022).
- Beard, J.R.; Officer, A.; De Carvalho, I.A.; Sadana, R.; Pot, A.M.; Michel, J.P.; Lloyd-Sherlock, P.; Epping-Jordan, J.E.; Peeters, G.G.; Mahanani, W.R.; et al. The World report on ageing and health: A policy framework for healthy ageing. Lancet 2016, 387, 2145–2154. [Google Scholar] [CrossRef] [Green Version]
- López-Otín, C.; Blasco, M.A.; Partridge, L.; Serrano, M.; Kroemer, G. The hallmarks of aging. Cell 2013, 153, 1194–1217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maugeri, G.; Castrogiovanni, P.; Battaglia, G.; Pippi, R.; D’Agata, V.; Palma, A.; Di Rosa, M.; Musumeci, G. The impact of physical activity on psychological health during COVID-19 pandemic in Italy. Heliyon 2020, 6, e04315. [Google Scholar] [CrossRef]
- López-Bueno, R.; Calatayud, J.; Ezzatvar, Y.; Casajús, J.A.; Smith, L.; Andersen, L.L.; Lopez-Sanchez, G.F. Association between current physical activity and current perceived anxiety and mood in the initial phase of COVID-19 confinement. Front. Psychiatry 2020, 11, 729. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, Y.; Maeda, N.; Hirado, D.; Shirakawa, T.; Urabe, Y. Physical activity changes and its risk factors among community-dwelling Japanese older adults during the COVID-19 epidemic: Associations with subjective well-being and health-related quality of life. Int. J. Environ. Res. Public Health 2020, 17, 6591. [Google Scholar] [CrossRef] [PubMed]
- Acampora, G.; Cook, D.J.; Rashidi, P.; Vasilakos, A.V. A survey on ambient intelligence in healthcare. Proc. IEEE 2013, 101, 2470–2494. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zahid, N.; Sodhro, A.H.; Kamboh, U.R.; Alkhayyat, A.; Wang, L. AI-driven adaptive reliable and sustainable approach for internet of things enabled healthcare system. Math. Biosci. Eng. 2022, 19, 3953–3971. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Benadduci, M.; Bonfigli, A.R.; Riccardi, G.R.; Melone, G.; La Forgia, A.; Macchiarulo, N.; Rossetti, L.; Marzorati, M.; Rizzo, G.; et al. Dancing With Parkinson’s Disease: The SI-ROBOTICS Study Protocol. Front. Public Health 2021, 9, 780098. [Google Scholar] [CrossRef]
- Memon, M.; Wagner, S.R.; Pedersen, C.F.; Beevi, F.H.A.; Hansen, F.O. Ambient assisted living healthcare frameworks, platforms, standards, and quality attributes. Sensors 2014, 14, 4312–4341. [Google Scholar] [CrossRef]
- Hallal, P.C.; Andersen, L.B.; Bull, F.C.; Guthold, R.; Haskell, W.; Ekelund, U. Lancet Physical Activity Series Working Group. Global physical activity levels: Surveillance progress, pitfalls, and prospects. Lancet 2012, 380, 247–257. [Google Scholar] [CrossRef]
- Edwardson, C.L.; Gorely, T.; Davies, M.J.; Gray, L.J.; Khunti, K.; Wilmot, E.G.; Yates, T.; Biddle, S.J. Association of sedentary behaviour with metabolic syndrome: A meta-analysis. PLoS ONE 2012, 7, e34916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mun, J.; Kim, Y.; Farnsworth, J.L.; Suh, S.; Kang, M. Association between objectively measured sedentary behavior and a criterion measure of obesity among adults. Am. J. Hum. Biol. 2018, 30, e23080. [Google Scholar] [CrossRef] [PubMed]
- Biswas, A.; Oh, P.I.; Faulkner, G.E.; Bajaj, R.R.; Silver, M.A.; Mitchell, M.S.; Alter, D.A. Sedentary time and its association with risk for disease incidence, mortality, and hospitalization in adults: A systematic review and meta-analysis. Ann. Intern. Med. 2015, 162, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Kenny, G.P.; Notley, S.R.; Gagnon, D. Direct calorimetry: A brief historical review of its use in the study of human metabolism and thermoregulation. Eur. J. Appl. Physiol. 2017, 117, 1765–1785. [Google Scholar] [CrossRef]
- Ferrannini, E. The theoretical bases of indirect calorimetry: A review. Metabolism 1988, 37, 287–301. [Google Scholar] [CrossRef]
- Weir, J.D.V. New methods for calculating metabolic rate with special reference to protein metabolism. J. Physiol. 1949, 109, 1–9. [Google Scholar] [CrossRef]
- Aguilar-Farías, N.; Brown, W.J.; Peeters, G.G. ActiGraph GT3X+ cut-points for identifying sedentary behaviour in older adults in free-living environments. J. Sci. Med. Sport 2014, 17, 293–299. [Google Scholar] [CrossRef]
- Dahlgren, G.; Carlsson, D.; Moorhead, A.; Häger-Ross, C.; McDonough, S.M. Test–retest reliability of step counts with the ActivPAL™ device in common daily activities. Gait Posture 2010, 32, 386–390. [Google Scholar] [CrossRef]
- Amaro-Gahete, F.J.; Sanchez-Delgado, G.; Alcantara, J.M.; Martinez-Tellez, B.; Acosta, F.M.; Merchan-Ramirez, E.; Löf, M.; Labayen, I.; Ruiz, J.R. Energy expenditure differences across lying, sitting, and standing positions in young healthy adults. PLoS ONE 2019, 14, e0217029. [Google Scholar]
- Dwyer, T.J.; Alison, J.A.; McKeough, Z.J.; Elkins, M.R.; Bye, P.T.P. Evaluation of the SenseWear activity monitor during exercise in cystic fibrosis and in health. Respir. Med. 2009, 103, 1511–1517. [Google Scholar] [CrossRef] [Green Version]
- Sazonov, E.; Hegde, N.; Browning, R.C.; Melanson, E.L.; Sazonova, N.A. Posture and activity recognition and energy ex-penditure estimation in a wearable platform. IEEE J. Biomed. Health Inform. 2015, 19, 1339–1346. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guediri, A.; Robin, L.; Lacroix, J.; Aubourg, T.; Vuillerme, N.; Mandigout, S. Comparison of Energy Expenditure Assessed Using Wrist-and Hip-Worn ActiGraph GT3X in Free-Living Conditions in Young and Older Adults. Front. Med. 2021, 8, 696968. [Google Scholar] [CrossRef] [PubMed]
- Nathan, D.; Huynh, D.Q.; Rubenson, J.; Rosenberg, M. Estimating physical activity energy expenditure with the kinect sensor in an exergaming environment. PLoS ONE 2015, 10, e0127113. [Google Scholar] [CrossRef] [Green Version]
- Koporec, G.; Vučković, G.; Milić, R.; Perš, J. Quantitative contact-less estimation of energy expenditure from video and 3D imagery. Sensors 2018, 18, 2435. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Liu, C.; Tsow, F.; Shao, D.; Yu, H.; Xia, S.; Tao, N. Remote quantification of workout energy expenditure with a cell phone camera. IEEE Sens. J. 2016, 16, 8263–8270. [Google Scholar] [CrossRef]
- Tao, L.; Burghardt, T.; Mirmehdi, M.; Damen, D.; Cooper, A.; Hannuna, S.; Camplani, M.; Paiement, A.; Craddock, I. Calorie counter: RGB-depth visual estimation of energy expenditure at home. In Proceedings of the Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016; pp. 239–251. [Google Scholar]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual–inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. Improving human action recognition using fusion of depth camera and inertial sensors. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 51–61. [Google Scholar] [CrossRef]
- Pitsikalis, V.; Katsamanis, A.; Theodorakis, S.; Maragos, P. Multimodal gesture recognition via multiple hypotheses rescoring. In Gesture Recognition; Springer: Cham, Switzerland, 2017; pp. 467–496. [Google Scholar]
- Gasparrini, S.; Cippitelli, E.; Gambi, E.; Spinsante, S.; Wåhslén, J.; Orhan, I.; Lindh, T. Proposal and experimental evaluation of fall detection solution based on wearable and depth data fusion. In Proceedings of the International Conference on ICT Innovations, Ohrid, Macedonia, 1–4 October 2015; pp. 99–108. [Google Scholar]
- Diethe, T.; Twomey, N.; Kull, M.; Flach, P.; Craddock, I. Probabilistic sensor fusion for ambient assisted living. arXiv 2017, arXiv:1702.01209. [Google Scholar]
- Intel RealSense D435i. Available online: https://www.intelrealsense.com/depth-camera-d435i/ (accessed on 19 April 2022).
- Lugaresi, C.; Tang, J.; Nash, H.; McClanahan, C.; Uboweja, E.; Hays, M.; Zhang, F.; Chang, C.-L.; Yong, M.; Lee, J.; et al. MediaPipe: A framework for building perception pipelines. arXiv 2019, arXiv:1906.08172. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1999. [Google Scholar]
- Shimmer3 IMU Unit. Available online: https://shimmersensing.com/product/shimmer3-imu-unit/ (accessed on 20 April 2022).
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer placement for posture recognition and fall detection. In Proceedings of the 2011 Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 47–54. [Google Scholar]
- Fisher, C.J. AN-1057: Using an Accelerometer for Inclination Sensing. Available online: https://www.analog.com/en/app-notes/an-1057.html (accessed on 21 April 2022).
- Sinha, V.K.K.; Patro, K.K.K.; Pławiak, P.; Prakash, A.J.J. Smartphone-Based Human Sitting Behaviors Recognition Using Inertial Sensor. Sensors 2021, 21, 6652. [Google Scholar] [CrossRef]
- Muthukrishnan, R.; Rohini, R. LASSO: A feature selection technique in predictive modeling for machine learning. In Proceedings of the 2016 IEEE International Conference on Advances in Computer Applications (ICACA), Tamilnadu, India, 24–24 October 2016; pp. 18–20. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2000, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Raspberry Pi 4 Tech Specs. Available online: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/specifications/ (accessed on 30 April 2022).
- Bezdek, J.C.; Keller, J.; Krisnapuram, R.; Pal, N. Fuzzy Models and Algorithms for Pattern Recognition and Image Processing; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Snoek, C.G.; Worring, M.; Smeulders, A.W. Early versus late fusion in semantic video analysis. In Proceedings of the 13th Annual ACM International Conference on Multimedia, Singapore, 6–11 November 2005; pp. 399–402. [Google Scholar]
- Jetté, M.; Sidney, K.; Blümchen, G. Metabolic equivalents (METS) in exercise testing, exercise prescription, and evaluation of functional capacity. Clin. Cardiol. 1990, 13, 555–565. [Google Scholar] [CrossRef] [PubMed]
- Byrne, N.M.; Hills, A.P.; Hunter, G.R.; Weinsier, R.L.; Schutz, Y. Metabolic equivalent: One size does not fit all. J. Appl. Physiol. 2005, 99, 1112–1119. [Google Scholar] [CrossRef] [Green Version]
- Ainsworth, B.E.; Haskell, W.L.; Whitt, M.C.; Irwin, M.L.; Swartz, A.M.; Strath, S.J.; Brien, W.L.O.; Bassett, D.R.; Schmitz, K.H.; Emplaincourt, P.O.; et al. Compendium of physical activities: An update of activity codes and MET intensities. Med. Sci. Sport. Exerc. 2000, 32, 498–504. [Google Scholar] [CrossRef] [Green Version]
- Grandini, M.; Bagli, E.; Visani, G. Metrics for multi-class classification: An overview. arXiv 2020, arXiv:2008.05756. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Bhat, P.C.; Prosper, H.B.; Sekmen, S.; Stewart, C. Optimizing event selection with the random grid search. Comput. Phys. Commun. 2018, 228, 245–257. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Constantino, M.; Konios, A.; Mustafa, M.A.; Nugent, C.; Morrison, G. Ambient and Wearable Sensor Fusion for Abnormal Behaviour Detection in Activities of Daily Living. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Austin, TX, USA, 23–27 March 2020; pp. 1–6. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Posture | MET |
|---|---|
| Standing | 1.2 |
| Sitting | 1.0 |
| Bending | 0.9 |
| Lying down | 1.0 |
| Walking | MET |
| Very low speed (<1.5 km/h) | 1.9 |
| Low speed (1.5–3.0 km/h) | 2.6 |
| Medium speed (3.0–4.5 km/h) | 3.4 |
| Participant No. | Gender | Age (Year) | Weight (kg) | Body Mass Index (BMI) |
|---|---|---|---|---|
| 1 | MALE | 67 | 81 | 27.06 |
| 2 | FEMALE | 71 | 55 | 23.19 |
| 3 | FEMALE | 70 | 59 | 23.04 |
| 4 | MALE | 70 | 75 | 27.54 |
| 5 | MALE | 65 | 66 | 21.30 |
| 6 | FEMALE | 68 | 61 | 26.40 |
| 7 | FEMALE | 68 | 52 | 18.42 |
| 8 | MALE | 69 | 83 | 31.23 |
| 9 | FEMALE | 65 | 54 | 20.83 |
| 10 | MALE | 69 | 78 | 28.65 |
| 11 | MALE | 73 | 70 | 23.66 |
| Protocol 1 | Protocol 2 | Protocol 3 | |||
|---|---|---|---|---|---|
| Posture/Action | Dur (s) | Posture/Action | Dur (s) | Posture/Action | Dur (s) |
| W vls | 30 | W vls | 60 | Si | 30 |
| St | 60 | Ly | 30 | St | 30 |
| W ls | 30 | St | 30 | W ls | 30 |
| Si | 90 | Be | 30 | Ly | 60 |
| W ls | 30 | W ls | 30 | St | 30 |
| St | 30 | Ly | 60 | Be | 30 |
| W ms | 30 | W ls | 30 | W vls | 30 |
| Be | 30 | St | 60 | Si | 60 |
| W vls | 60 | W ms | 60 | St | 30 |
| Si | 30 | Si | 30 | W vls | 30 |
| Total dur (m) | 7 | 7 | 6 | ||
| Cohen’s Kappa | Agreement |
|---|---|
| slight | |
| fair | |
| moderate | |
| good | |
| perfect |
| Sensor Node | Protocol 1 | Protocol 2 | Protocol 3 | |||
|---|---|---|---|---|---|---|
| Accuracy | k | Accuracy | k | Accuracy | k | |
| Ambient | 0.905 | 0.890 | 0.941 | 0.931 | 0.953 | 0.945 |
| Wearable | 0.957 | 0.950 | 0.939 | 0.928 | 0.919 | 0.906 |
| Classifiers | Protocol 1 | Protocol 2 | Protocol 3 | Avg Accuracy | |||
|---|---|---|---|---|---|---|---|
| Accuracy | k | Accuracy | k | Accuracy | k | ||
| RF | 0.984 | 0.978 | 0.972 | 0.931 | 0.973 | 0.969 | 0.976 |
| SVM | 0.980 | 0.968 | 0.970 | 0.958 | 0.967 | 0.942 | 0.972 |
| KNN | 0.975 | 0.956 | 0.968 | 0.960 | 0.963 | 0.937 | 0.968 |
| User | EEgt (Kcal) | RE (%) | ||
|---|---|---|---|---|
| Ambient | Wearable | Integrated | ||
| 1 | 16.15 | 9.4 | 3.5 | 2.7 |
| 2 | 14.96 | 7.6 | 4.1 | 3.0 |
| 3 | 13.16 | 8.1 | 3.7 | 2.9 |
| 4 | 16.55 | 7.7 | 3.4 | 2.8 |
| 5 | 15.56 | 6.6 | 4.4 | 2.5 |
| 6 | 13.96 | 7.8 | 4.0 | 3.0 |
| 7 | 10.97 | 9.0 | 7.7 | 3.2 |
| 8 | 11.77 | 13.3 | 3.9 | 2.5 |
| 9 | 12.16 | 8.1 | 3.5 | 2.2 |
| 10 | 10.37 | 8.0 | 7.2 | 2.4 |
| 11 | 10.77 | 8.9 | 4.0 | 2.7 |
| User | EEgt (Kcal) | RE (%) | ||
|---|---|---|---|---|
| Ambient | Wearable | Integrated | ||
| 1 | 18.78 | 6.8 | 4.5 | 2.5 |
| 2 | 17.39 | 6.0 | 4.7 | 2.7 |
| 3 | 15.30 | 5.3 | 4.2 | 2.8 |
| 4 | 19.24 | 6.1 | 4.9 | 3.0 |
| 5 | 18.08 | 5.8 | 5.4 | 2.6 |
| 6 | 16.23 | 6.0 | 5.3 | 3.1 |
| 7 | 12.75 | 7.2 | 7.9 | 2.9 |
| 8 | 13.68 | 11.1 | 4.6 | 2.2 |
| 9 | 14.14 | 7.9 | 5.0 | 3.0 |
| 10 | 12.05 | 6.1 | 9.5 | 2.5 |
| 11 | 12.52 | 6.2 | 5.3 | 2.6 |
| User | EEgt (Kcal) | RE (%) | ||
|---|---|---|---|---|
| Ambient | Wearable | Integrated | ||
| 1 | 11.26 | 3.4 | 7.4 | 2.1 |
| 2 | 10.43 | 4.1 | 7.7 | 2.2 |
| 3 | 9.18 | 3.9 | 6.3 | 3.1 |
| 4 | 11.54 | 4.2 | 6.8 | 2.7 |
| 5 | 10.85 | 3.9 | 7.6 | 2.4 |
| 6 | 9.73 | 4.1 | 8.0 | 2.8 |
| 7 | 7.65 | 4.2 | 10.4 | 3.2 |
| 8 | 8.20 | 8.0 | 6.9 | 2.5 |
| 9 | 8.48 | 3.3 | 6.6 | 2.5 |
| 10 | 7.23 | 4.0 | 11.8 | 2.8 |
| 11 | 7.51 | 3.5 | 7.7 | 2.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leone, A.; Rescio, G.; Diraco, G.; Manni, A.; Siciliano, P.; Caroppo, A. Ambient and Wearable Sensor Technologies for Energy Expenditure Quantification of Ageing Adults. Sensors 2022, 22, 4893. https://0-doi-org.brum.beds.ac.uk/10.3390/s22134893
Leone A, Rescio G, Diraco G, Manni A, Siciliano P, Caroppo A. Ambient and Wearable Sensor Technologies for Energy Expenditure Quantification of Ageing Adults. Sensors. 2022; 22(13):4893. https://0-doi-org.brum.beds.ac.uk/10.3390/s22134893
Chicago/Turabian StyleLeone, Alessandro, Gabriele Rescio, Giovanni Diraco, Andrea Manni, Pietro Siciliano, and Andrea Caroppo. 2022. "Ambient and Wearable Sensor Technologies for Energy Expenditure Quantification of Ageing Adults" Sensors 22, no. 13: 4893. https://0-doi-org.brum.beds.ac.uk/10.3390/s22134893