
Estimation of Steering and Throttle Angles of a Motorized Mobility Scooter with Inertial Measurement Units for Continuous Quantification of Driving Operation


Abstract
:1. Introduction
2. Materials and Methods
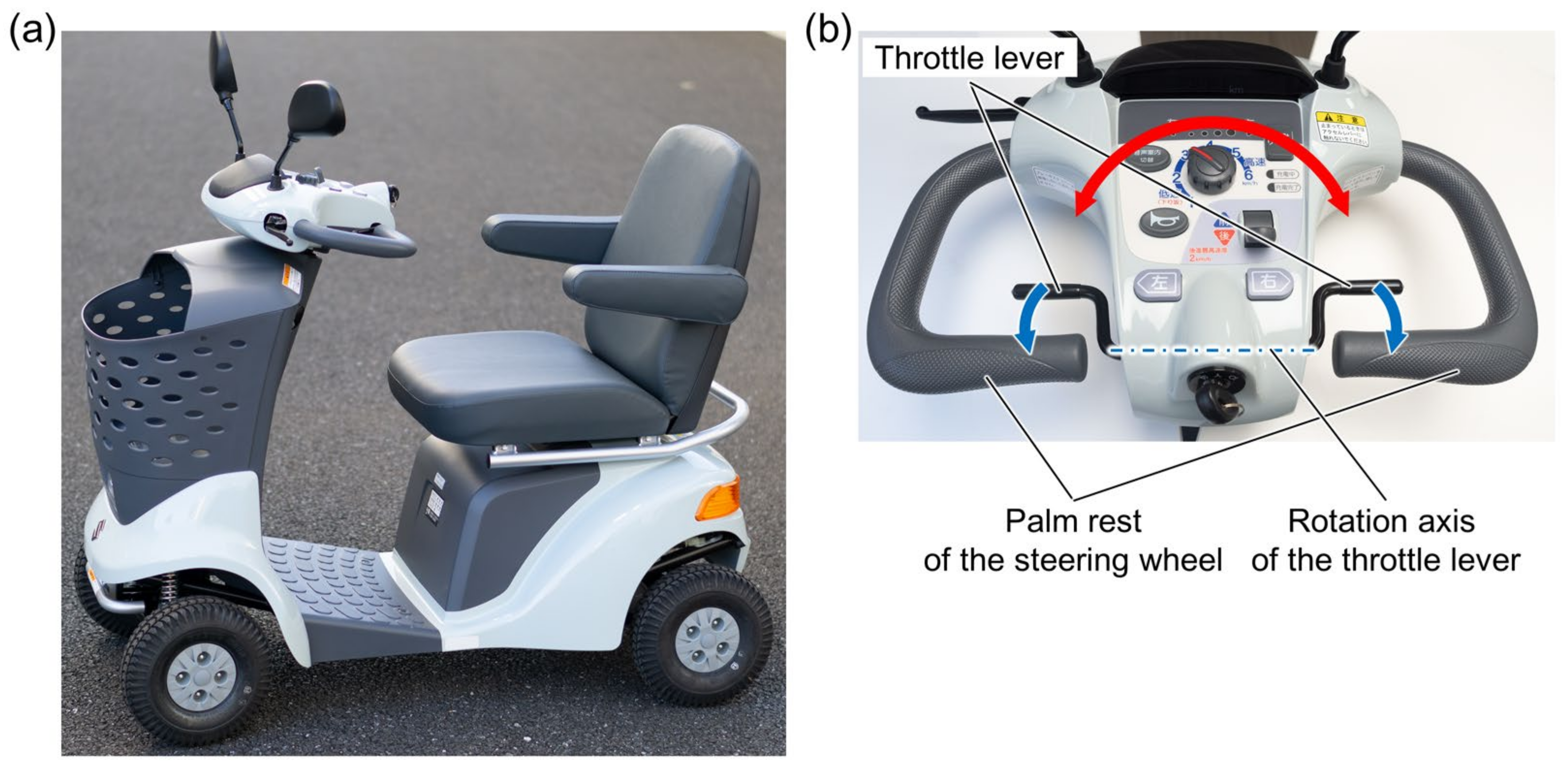
2.1. Structure of the Test MMS
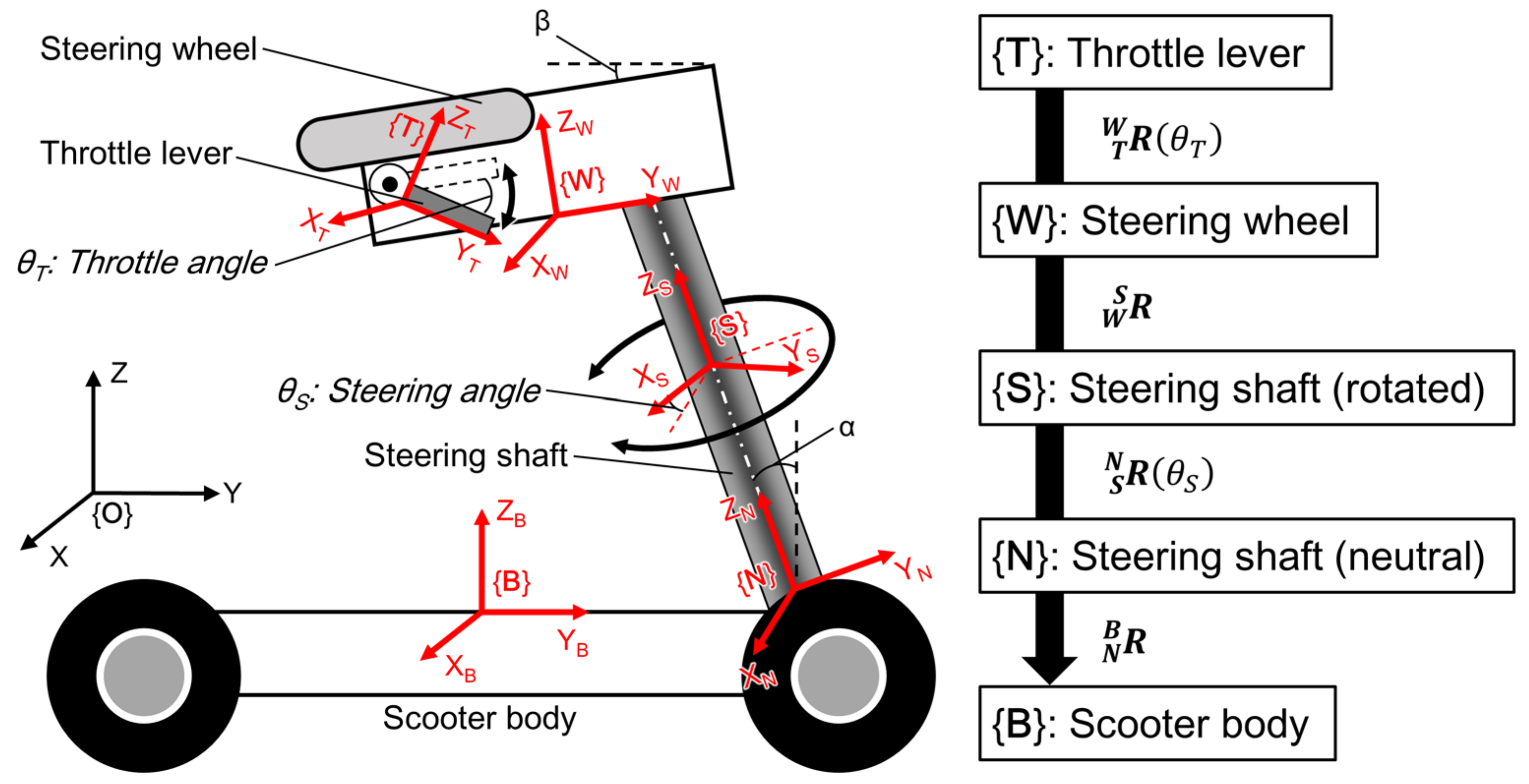
2.2. Transformation of Gravitational Acceleration into the Operation Angles
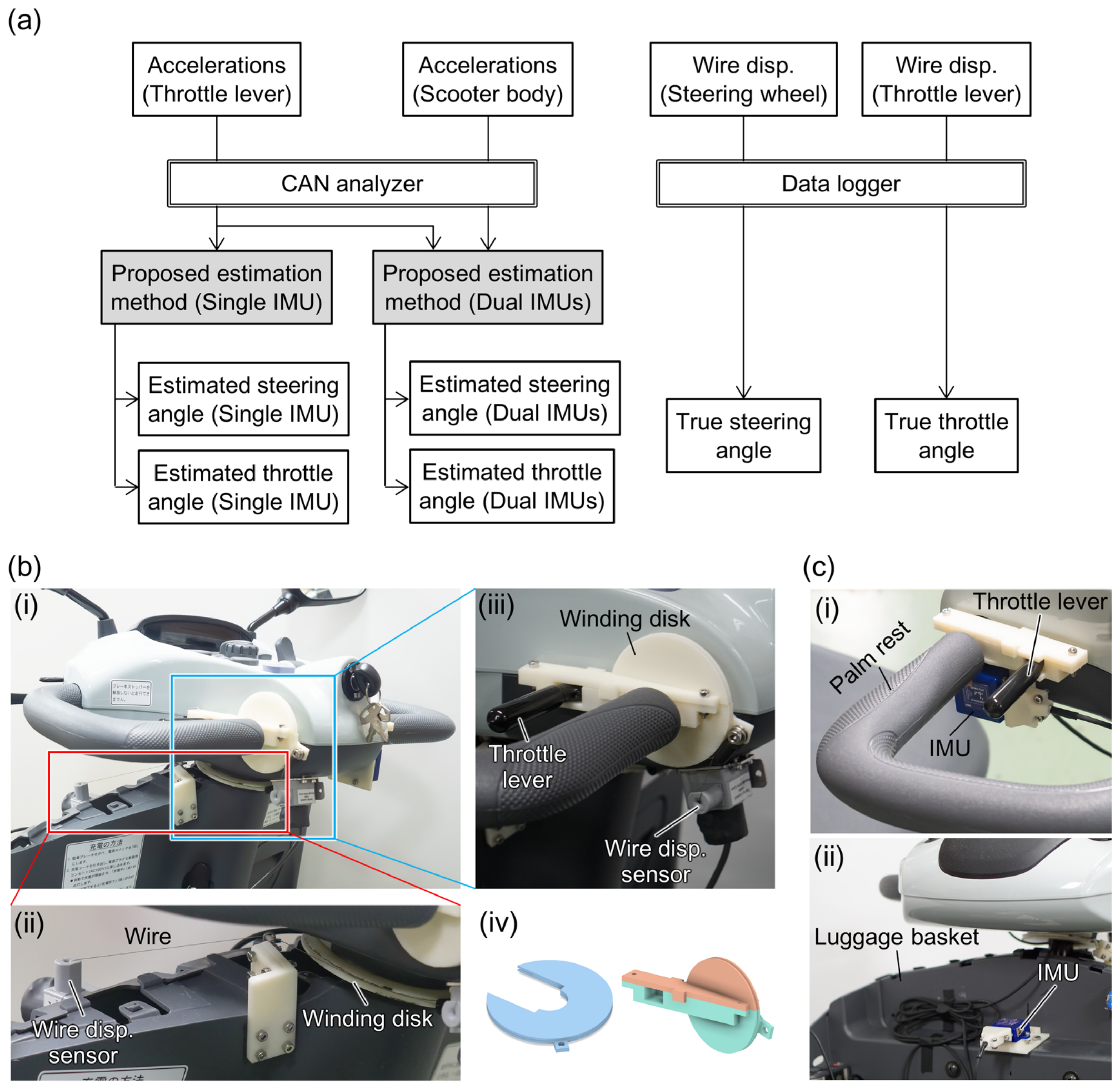
2.3. Measurement Equipment for Accuracy Evaluation
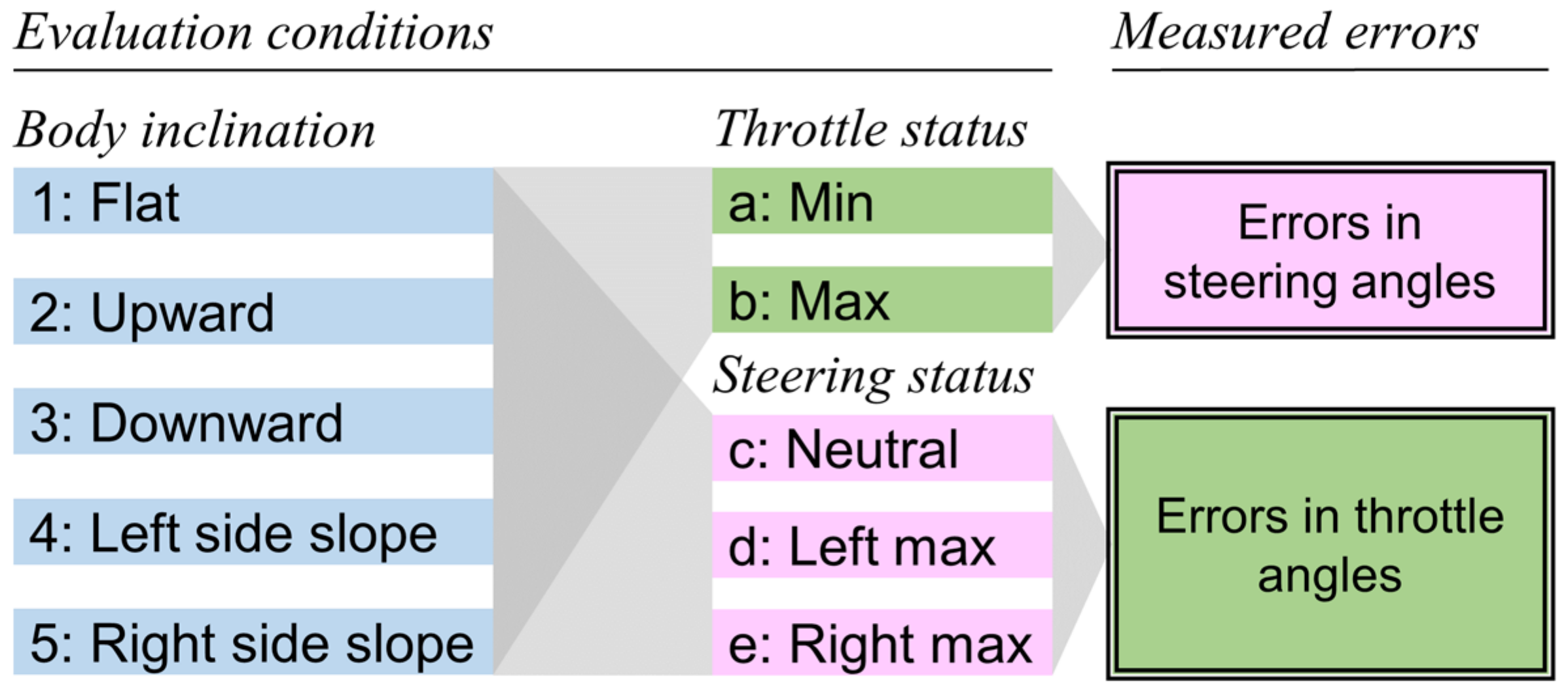
2.4. Geometric Evaluation
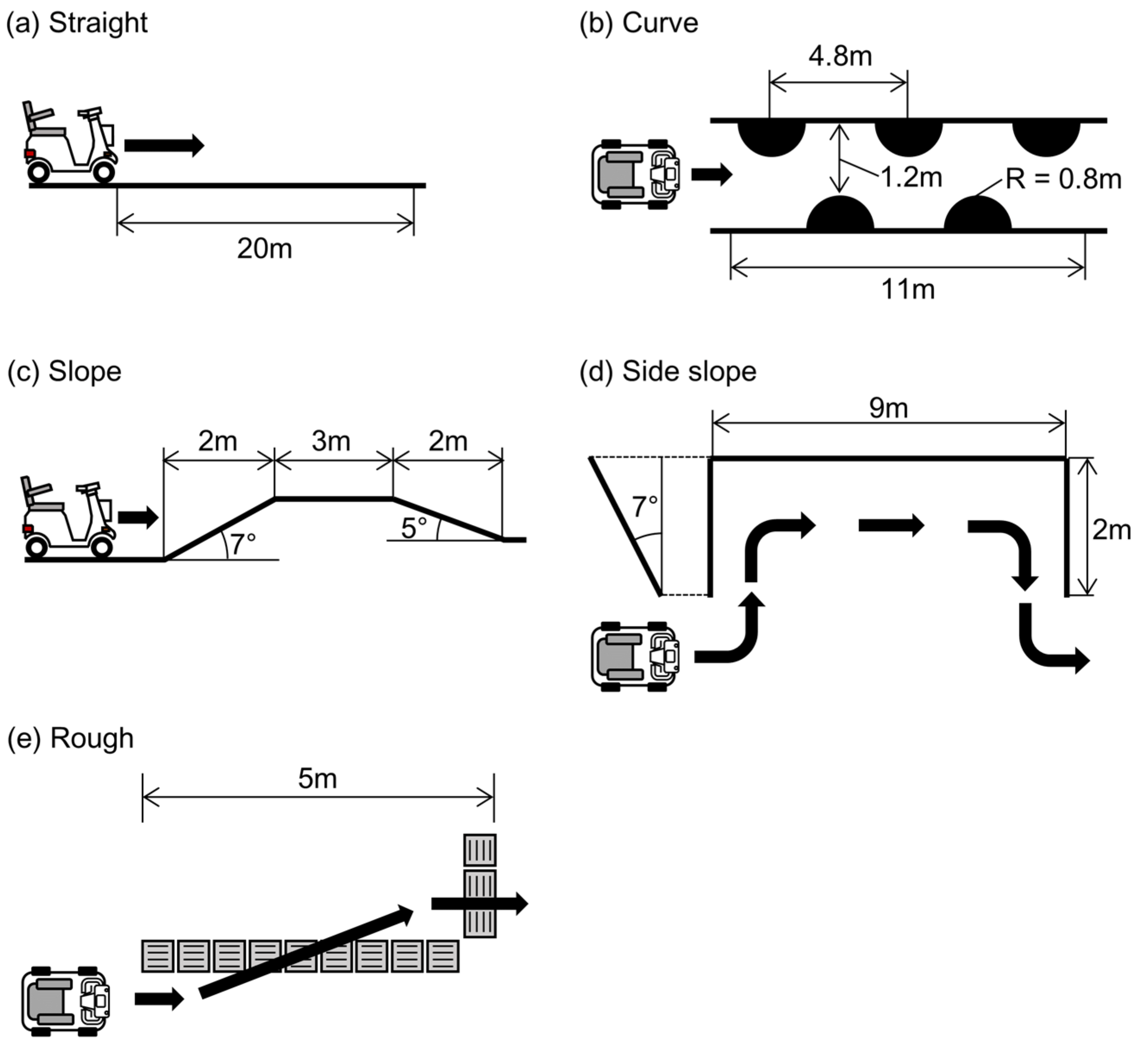
2.5. Evaluation during Driving
3. Results
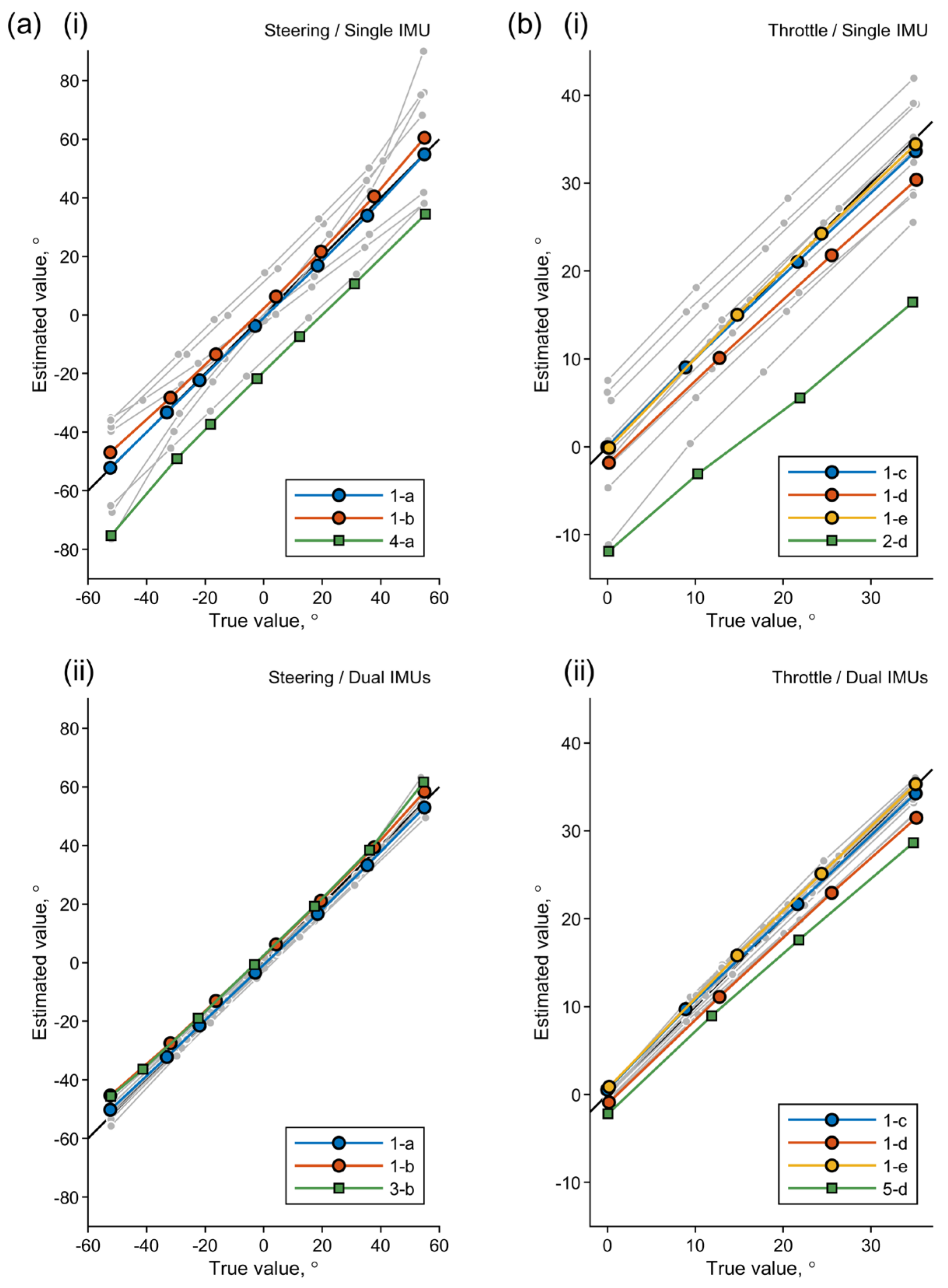
3.1. Geometric Evaluation
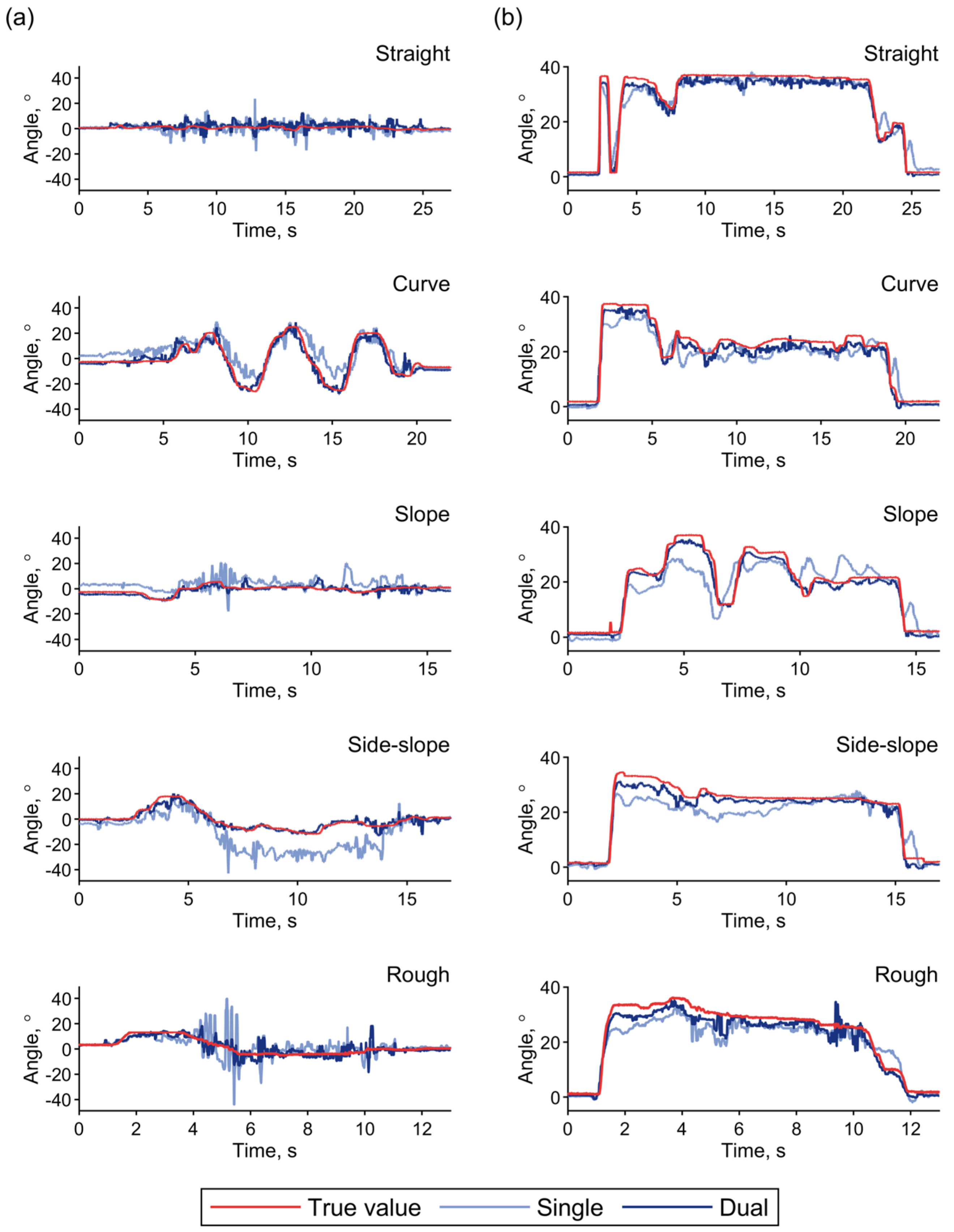
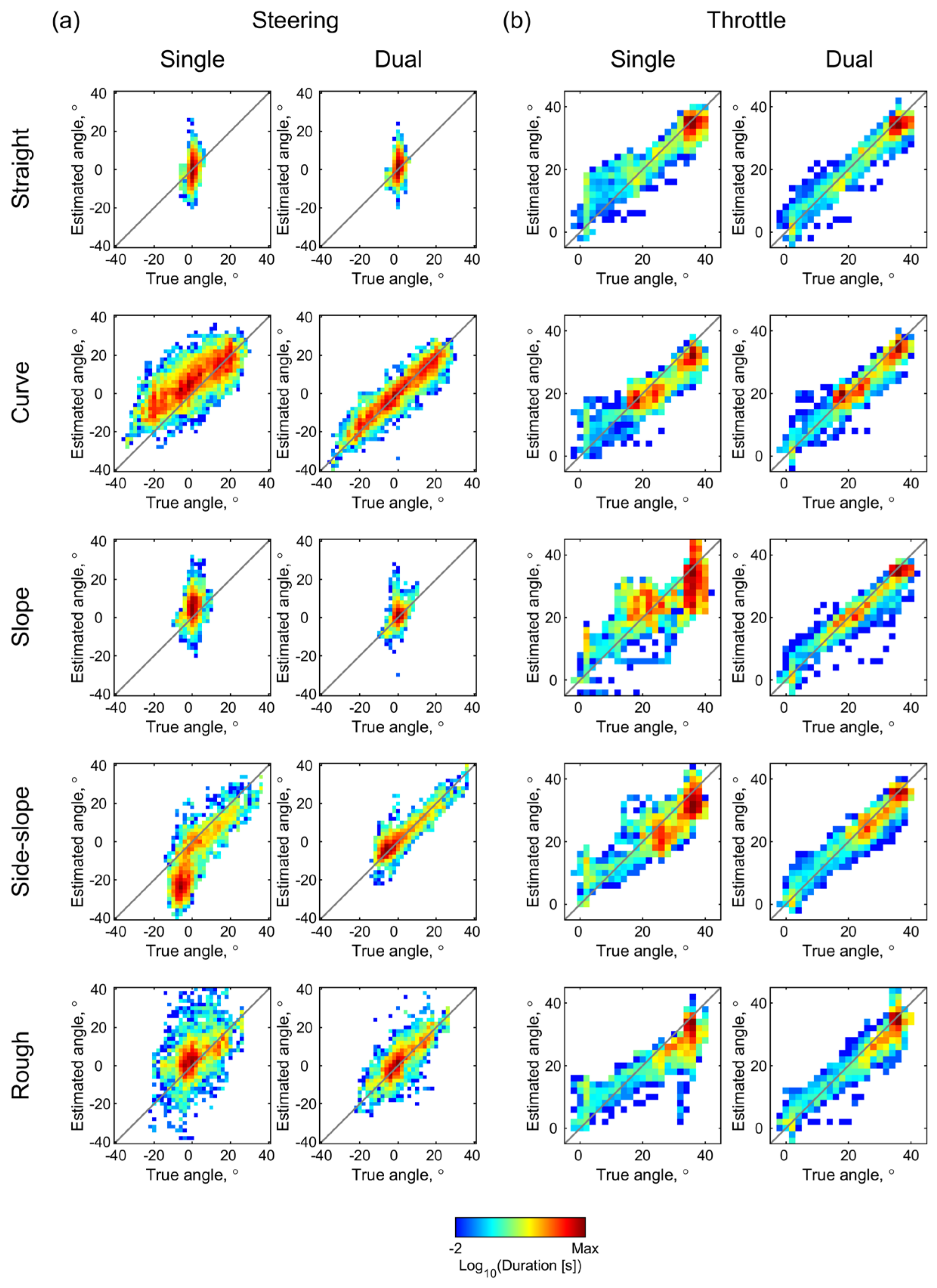
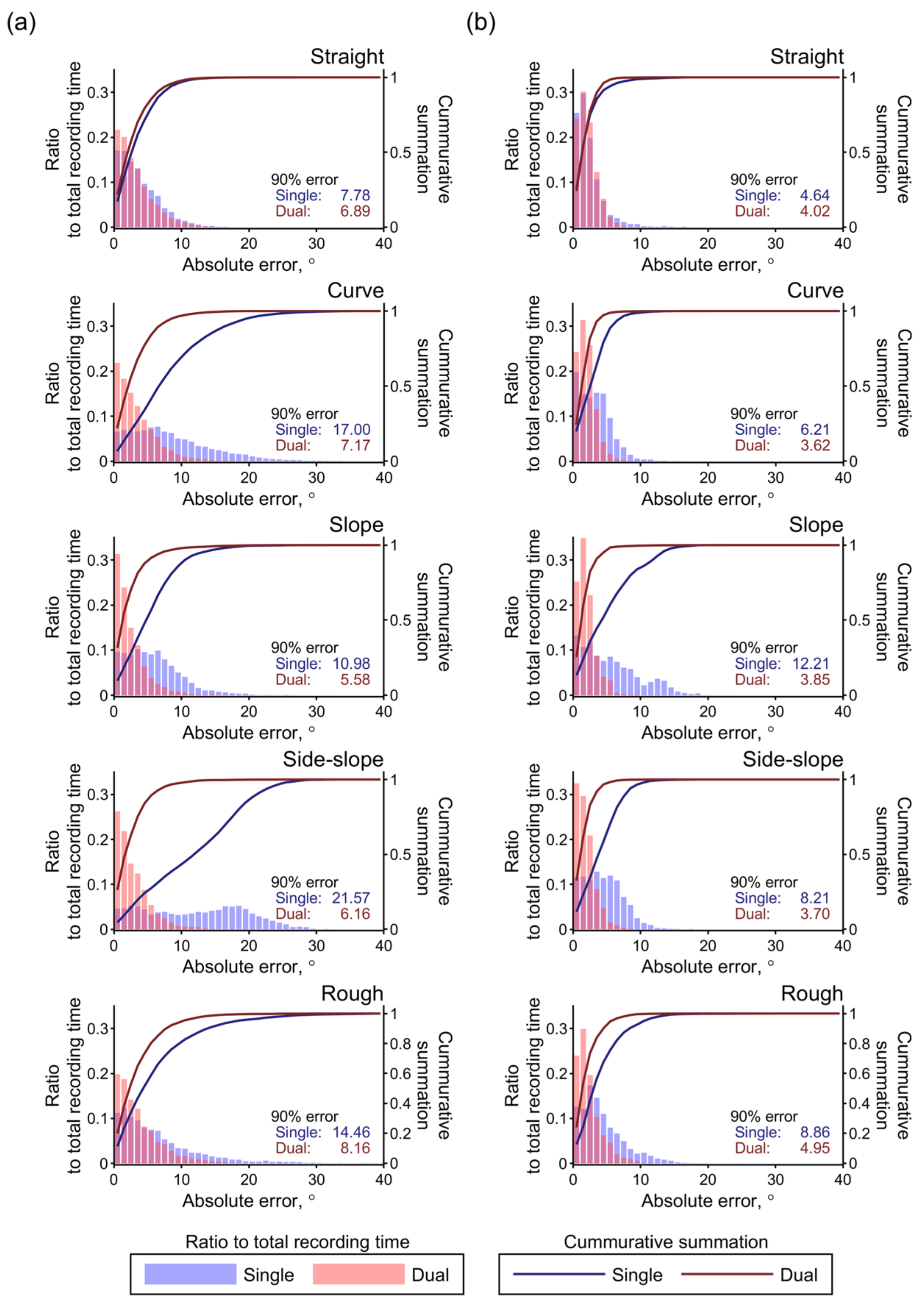
3.2. Evaluation during Driving
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fomiatti, R.; Richmond, J.; Moir, L.; Millsteed, J. A systematic review of the impact of powered mobility devices on older adults’ activity engagement. Phys. Occup. Ther. Geriatr. 2013, 31, 297–309. [Google Scholar] [CrossRef] [Green Version]
- Thoreau, R. The impact of mobility scooters on their users. Does their usage help or hinder?: A state of the art review. J. Transp. Health 2015, 2, 269–275. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Frank, A.; Neophytou, C.; Frank, J.; De Souza, L. Electric-powered indoor/outdoor wheelchairs (EPIOCs): Users’ views of influence on family, friends and carers. Disabil. Rehabil. Assist. Technol. 2010, 5, 327–338. [Google Scholar] [CrossRef] [PubMed]
- Ripat, J.; Verdonck, M.; Carter, R.J. The meaning ascribed to wheeled mobility devices by individuals who use wheelchairs and scooters: A metasynthesis. Disabil. Rehabil. Assist. Technol. 2018, 13, 253–262. [Google Scholar] [CrossRef] [PubMed]
- Fredriksson, C.; Pettersson, I.; Hagberg, L.; Hermansson, L. The value of powered mobility scooters from the perspective of elderly spouses of the users–a qualitative study. Disabil. Rehabil. Assist. Technol. 2020, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Löfqvist, C.; Pettersson, C.; Iwarsson, S.; Brandt, A. Mobility and mobility-related participation outcomes of powered wheelchair and scooter interventions after 4-months and 1-year use. Disabil. Rehabil. Assist. Technol. 2012, 7, 211–218. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sund, T.; Brandt, Å. Adult Scandinavians’ use of powered scooters: User satisfaction, frequency of use, and prediction of daily use. Disabil. Rehabil. Assist. Technol. 2018, 13, 212–219. [Google Scholar] [CrossRef] [PubMed]
- Mortenson, W.B.; Kim, J. Scoping review of mobility scooter-related research studies. J. Rehabil. Res. Dev. 2016, 53, 531–540. [Google Scholar] [CrossRef]
- Jancey, J.; Cooper, L.; Howat, P.; Meuleners, L.; Sleet, D.; Baldwin, G. Pedestrian and Motorized Mobility Scooter Safety of Older People. Traffic Inj. Prev. 2013, 14, 647–653. [Google Scholar] [CrossRef]
- Kitching, F.A.; Ozanne-Smith, J.; Gibson, K.; Clapperton, A.; Cassell, E. Deaths of older Australians related to their use of motorised mobility scooters. Int. J. Inj. Contr. Saf. Promot. 2016, 23, 346–350. [Google Scholar] [CrossRef]
- Murphy, C.G.; Murphy, I.G.; O’Rourke, K.S.; O’Shea, K. Motorised mobility scooters; upper limb fractures in elderly novice users. Clin. Cases Miner. Bone Metab. 2014, 11, 132–135. [Google Scholar] [CrossRef] [PubMed]
- Gitelman, V.; Pesahov, F.; Carmel, R.; Chen, S. Exploring the characteristics of potential and current users of mobility scooters, among older people in Israel. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 373–389. [Google Scholar] [CrossRef]
- Isaacson, M.; Barkay, D. Mobility scooters in urban environments: A research agenda. J. Transp. Health 2020, 18, 100917. [Google Scholar] [CrossRef] [PubMed]
- Henje, C.; Stenberg, G.; Lundälv, J.; Carlsson, A. Obstacles and risks in the traffic environment for users of powered wheelchairs in Sweden. Accid. Anal. Prev. 2021, 159, 106259. [Google Scholar] [CrossRef] [PubMed]
- Akter, S.; Mamun, M.M.H.; Mwakalonge, J.L.; Comert, G.; Siuhi, S. A policy review of electric personal assistive mobility devices. Transp. Res. Interdiscip. Perspect. 2021, 11, 100426. [Google Scholar] [CrossRef]
- Mortenson, W.B.; Clarke, L.H.; Best, K. Prescribers’ experiences with powered mobility prescription among older adults. Am. J. Occup. Ther. 2013, 67, 100–107. [Google Scholar] [CrossRef] [Green Version]
- Pellichero, A.; Kenyon, L.K.; Best, K.L.; Sorita, É.; Lamontagne, M.E.; Lavoie, M.D.; Routhier, F. Influence of cognitive functioning on powered mobility device use: Protocol for a systematic review. JMIR Res. Protoc. 2020, 9, e16534. [Google Scholar] [CrossRef] [Green Version]
- Suzurikawa, J.; Sawada, Y.; Sakiyama, M.; Suwa, M.; Inoue, T.; Kondo, T. Perspectives of Multidisciplinary Professional Teams during Assessment Processes for ATD Selection in the Japanese Public Provision System. Int. J. Environ. Res. Public Health 2021, 18, 2697. [Google Scholar] [CrossRef]
- Edwards, K.; McCluskey, A. A survey of adult power wheelchair and scooter users. Disabil. Rehabil. Assist. Technol. 2010, 5, 411–419. [Google Scholar] [CrossRef]
- Sullivan, S.J.; La Grow, S.; Alla, S.; Schneiders, A.G. Riding into the future: A snapshot of elderly mobility scooter riders and how they use their scooters. N. Z. Med. J. 2014, 127, 43–49. [Google Scholar]
- Widehammar, C.; Lidström Holmqvist, K.; Pettersson, I.; Hermansson, L.N. Attitudes is the most important environmental factor for use of powered mobility devices–users’ perspectives. Scand. J. Occup. Ther. 2020, 27, 298–308. [Google Scholar] [CrossRef] [PubMed]
- Pettersson, C.; Iwarsson, S.; Brandt, Å.; Norin, L.; Lexell, E.M. Men’s and women’s perspectives on using a powered mobility device: Benefits and societal challenges. Scand. J. Occup. Ther. 2014, 21, 438–446. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carlsson, A.; Lundälv, J. Acute injuries resulting from accidents involving powered mobility devices (PMDs)—Development and outcomes of PMD-related accidents in Sweden. Traffic Inj. Prev. 2019, 20, 484–491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eck, D.; Schilling, K.; Abdul-Majeed, A.; Thielecke, J.; Richter, P.; Boronat, J.G.; Schens, I.; Thomas, B.; Williger, B.; Lang, F.R. Mobility assistance for older people. Appl. Bionics Biomech. 2012, 9, 69–83. [Google Scholar] [CrossRef]
- Liu, K.; Mulky, R. Enabling autonomous navigation for affordable scooters. Sensors 2018, 18, 1829. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cecotti, M.; Kanchwala, H.; Aouf, N. Autonomous Navigation for Mobility Scooters: A Complete Framework Based on Open-Source Software. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3627–3632. [Google Scholar] [CrossRef] [Green Version]
- Thoreau, R. Perception of needing and using a mobility scooter: A preclinically disabled non-scooter user perspective. Disabil. Rehabil. Assist. Technol. 2019, 14, 732–736. [Google Scholar] [CrossRef]
- Nitz, J.C. Evidence from a cohort of able bodied adults to support the need for driver training for motorized scooters before community participation. Patient Educ. Couns. 2008, 70, 276–280. [Google Scholar] [CrossRef]
- Toosizadeh, N.; Bunting, M.; Howe, C.; Mohler, J.; Sprinkle, J.; Najafi, B. Motorized mobility scooters: The use of training/intervention and technology for improving driving skills in aging adults—A mini-review. Gerontology 2014, 60, 357–365. [Google Scholar] [CrossRef] [Green Version]
- Mortenson, W.B.; Jang, S.; Goldsmith, C.H.; Hurd Clarke, L.; Hobson, S.; Emery, R. Feasibility of a Systematic, Comprehensive, One-to-One Training (SCOOT) program for new scooter users: Study protocol for a randomized control trial. Trials 2017, 18, 235. [Google Scholar] [CrossRef] [Green Version]
- Dawson, D.; Chan, R.; Kaiserman, E. Development of the Power-Mobility Indoor Driving Assessment for Residents of Long-Term Care Facilities: A Preliminary Report. Can. J. Occup. Ther. 1994, 61, 269–276. [Google Scholar] [CrossRef]
- Letts, L.; Dawson, D.; Kaiserman-Goldenstein, E. Development of the Power-mobility Community Driving Assessment. Can. J. Rehabil. 1998, 11, 123–129. [Google Scholar]
- Mountain, A.D.; Kirby, R.L.; Smith, C. The wheelchair skills test, version 2.4: Validity of an algorithm-based questionnaire version. Arch. Phys. Med. Rehabil. 2004, 85, 416–423. [Google Scholar] [CrossRef]
- Routhier, F.; Vincent, C.; Desrosiers, J.; Nadeau, S.; Guerette, C. Development of an obstacle course assessment of wheelchair user performance (OCAWUP): A content validity study. Technol. Disabil. 2004, 16, 19–31. [Google Scholar] [CrossRef]
- Suzurikawa, J.; Kinoshita, T.; Inoue, T.; Kamo, M.; Iida, N.; Iwata, K.; Matsumoto, O. Evaluation of changes in power wheelchair maneuver induced by a downhill turning prevention control on cross sloped surfaces. IEEJ Trans. Electr. Electron. Eng. 2012, 7, S184–S186. [Google Scholar] [CrossRef]
- Sorrento, G.U.; Archambault, P.S.; Routhier, F.; Dessureault, D.; Boissy, P. Assessment of Joystick control during the performance of powered wheelchair driving tasks. J. Neuroeng. Rehabil. 2011, 8, 31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rabreau, O.; Chevallier, S.; Chassagne, L.; Monacelli, E. SenseJoy, a pluggable solution for assessing user behavior during powered wheelchair driving tasks. J. Neuroeng. Rehabil. 2019, 16, 10–12. [Google Scholar] [CrossRef]
- Jannink, M.J.A.; Erren-Wolters, C.V.; De Kort, A.C.; Van Der Kooij, H. An electric scooter simulation program for training the driving skills of stroke patients with mobility problems: A pilot study. Cyberpsychol. Behav. 2008, 11, 751–754. [Google Scholar] [CrossRef]
- Cordes, C.; Heutink, J.; Brookhuis, K.A.; Brouwer, W.H.; Melis-Dankers, B.J.M. Driving slow motorised vehicles with visual impairment—A simulator study. Cogent Psychol. 2018, 5, 1–15. [Google Scholar] [CrossRef]
- Heutink, J.; Broekman, M.; Brookhuis, K.A.; Melis-Dankers, B.J.M.; Cordes, C. The effects of habituation and adding a rest-frame on experienced simulator sickness in an advanced mobility scooter driving simulator. Ergonomics 2019, 62, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [Green Version]
- Fasel, B.; Spörri, J.; Schütz, P.; Lorenzetti, S.; Aminian, K. Validation of functional calibration and strap-down joint drift correction for computing 3D joint angles of knee, hip, and trunk in alpine skiing. PLoS ONE 2017, 12, 1–17. [Google Scholar] [CrossRef]
- Vitali, R.V.; Perkins, N.C. Determining anatomical frames via inertial motion capture: A survey of methods. J. Biomech. 2020, 106, 109832. [Google Scholar] [CrossRef] [PubMed]
- Potter, M.V.; Cain, S.M.; Ojeda, L.V.; Gurchiek, R.D.; McGinnis, R.S.; Perkins, N.C. Error-state Kalman filter for lower-limb kinematic estimation: Evaluation on a 3-body model. PLoS ONE 2021, 16, 1–21. [Google Scholar] [CrossRef]
- Routhier, F.; Lettre, J.; Miller, W.C.; Borisoff, J.F.; Keetch, K.; Mitchell, I.M. Data Logger Technologies for Powered Wheelchairs: A Scoping Review. Assist. Technol. 2019, 31, 19–24. [Google Scholar] [CrossRef] [PubMed]
- Pineau, J.; Moghaddam, A.K.; Yuen, H.K.; Archambault, P.S.; Routhier, F.; Michaud, F.; Boissy, P. Automatic detection and classification of unsafe events during power wheelchair use. IEEE J. Transl. Eng. Health Med. 2014, 2, 1–9. [Google Scholar] [CrossRef]
- Haghi, M.; Thurow, K.; Stoll, R. Wearable devices in medical internet of things: Scientific research and commercially available devices. Healthc. Inform. Res. 2017, 23, 4–15. [Google Scholar] [CrossRef]
- Kim, W.; Lee, S.; Kim, S.; Jo, S.; Yoo, C.; Hwang, I.; Kang, S.; Song, J. Dyadic Mirror: Everyday Second-person Live-view for Empathetic Reflection upon Parent-child Interaction. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 1–29. [Google Scholar] [CrossRef]
- Kao, H.T.; Yan, S.; Hosseinmardi, H.; Narayanan, S.; Lerman, K.; Ferrara, E. User-Based Collaborative Filtering Mobile Health System. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 1–17. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Chen, J.; Fourati, H.; Li, R. Fast Complementary Filter for Attitude Estimation Using Low-Cost MARG Sensors. IEEE Sens. J. 2016, 16, 6997–7007. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Body Inclination | Errors in Steering Angles | Errors in Throttle Angles | |||
|---|---|---|---|---|---|
| Throttle Position | Steering Position | ||||
| a: Min | b: Max | c: Neutral | d: Left Max | e: Right Max | |
| Single IMU | |||||
| 1: Flat | 0.67 (0.61) | 3.47 (1.48) | 0.55 (0.66) | 3.29 (1.23) | 0.33 (0.24) |
| 2: Upward | 9.80 (9.30) | 10.79 (12.07) | 5.02 (0.60) | 15.02 (2.85) | 9.7 (1.04) |
| 3: Downward | 8.04 (5.69) | 8.81 (5.65) | 4.53 (0.51) | 5.55 (0.98) | 7.57 (0.40) |
| 4: Left side slope | 20.27 (1.42) | 15.30 (1.75) | 0.25 (0.30) | 1.55 (0.75) | 0.83 (0.74) |
| 5: Right side slope | 12.19 (1.43) | 15.87 (2.59) | 0.51 (0.41) | 3.95 (1.72) | 0.79 (0.44) |
| Dual IMUs | |||||
| 1: Flat | 1.41 (0.76) | 3.33 (1.95) | 0.56 (0.38) | 2.25 (1.15) | 0.68 (0.34) |
| 2: Upward | 2.15 (1.56) | 1.34 (1.16) | 0.53 (0.20) | 1.76 (0.96) | 1.00 (0.57) |
| 3: Downward | 1.45 (0.71) | 4.10 (2.09) | 0.29 (0.36) | 1.55 (1.16) | 0.81 (0.36) |
| 4: Left side slope | 3.57 (1.30) | 2.27 (1.59) | 0.49 (0.30) | 0.82 (0.68) | 1.23 (0.74) |
| 5: Right side slope | 1.18 (0.68) | 3.25 (2.82) | 0.51 (0.46) | 3.90 (1.73) | 0.79 (0.42) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suzurikawa, J.; Kurokawa, S.; Sugiyama, H.; Hase, K. Estimation of Steering and Throttle Angles of a Motorized Mobility Scooter with Inertial Measurement Units for Continuous Quantification of Driving Operation. Sensors 2022, 22, 3161. https://0-doi-org.brum.beds.ac.uk/10.3390/s22093161
Suzurikawa J, Kurokawa S, Sugiyama H, Hase K. Estimation of Steering and Throttle Angles of a Motorized Mobility Scooter with Inertial Measurement Units for Continuous Quantification of Driving Operation. Sensors. 2022; 22(9):3161. https://0-doi-org.brum.beds.ac.uk/10.3390/s22093161
Chicago/Turabian StyleSuzurikawa, Jun, Shunsuke Kurokawa, Haruki Sugiyama, and Kazunori Hase. 2022. "Estimation of Steering and Throttle Angles of a Motorized Mobility Scooter with Inertial Measurement Units for Continuous Quantification of Driving Operation" Sensors 22, no. 9: 3161. https://0-doi-org.brum.beds.ac.uk/10.3390/s22093161