
Computer-Vision-Based Sensing Technologies for Livestock Body Dimension Measurement: A Survey

 , ,
, ,  ,
,
Abstract
:1. Introduction
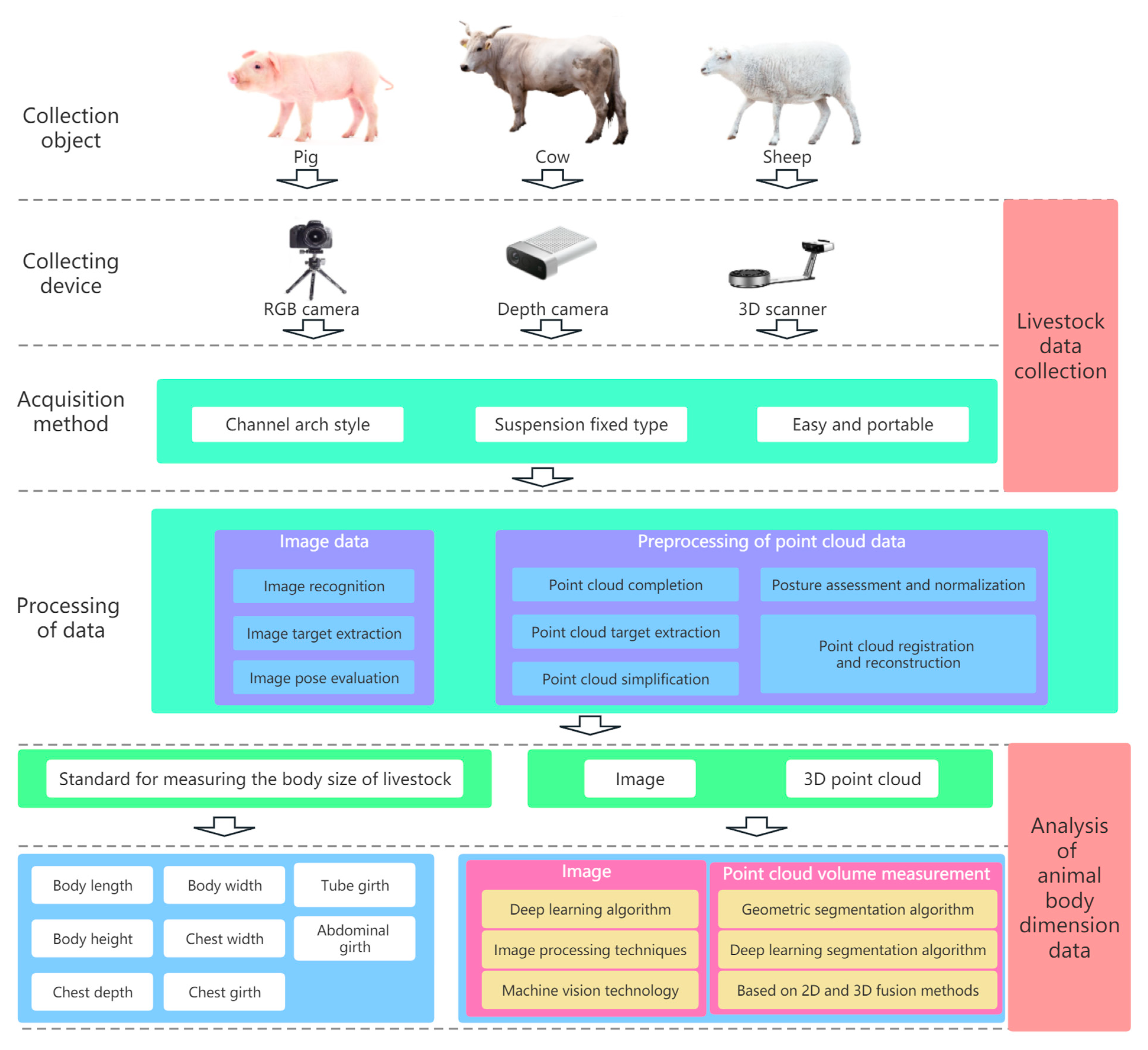
2. Raw Sensing Data Acquisition for Live Livestock Body Dimensions
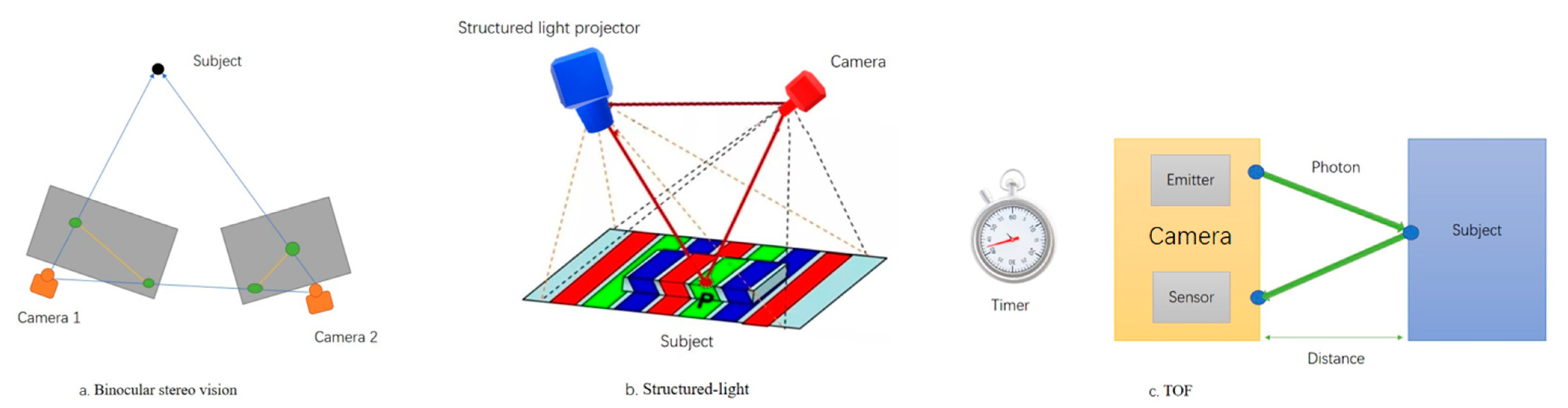
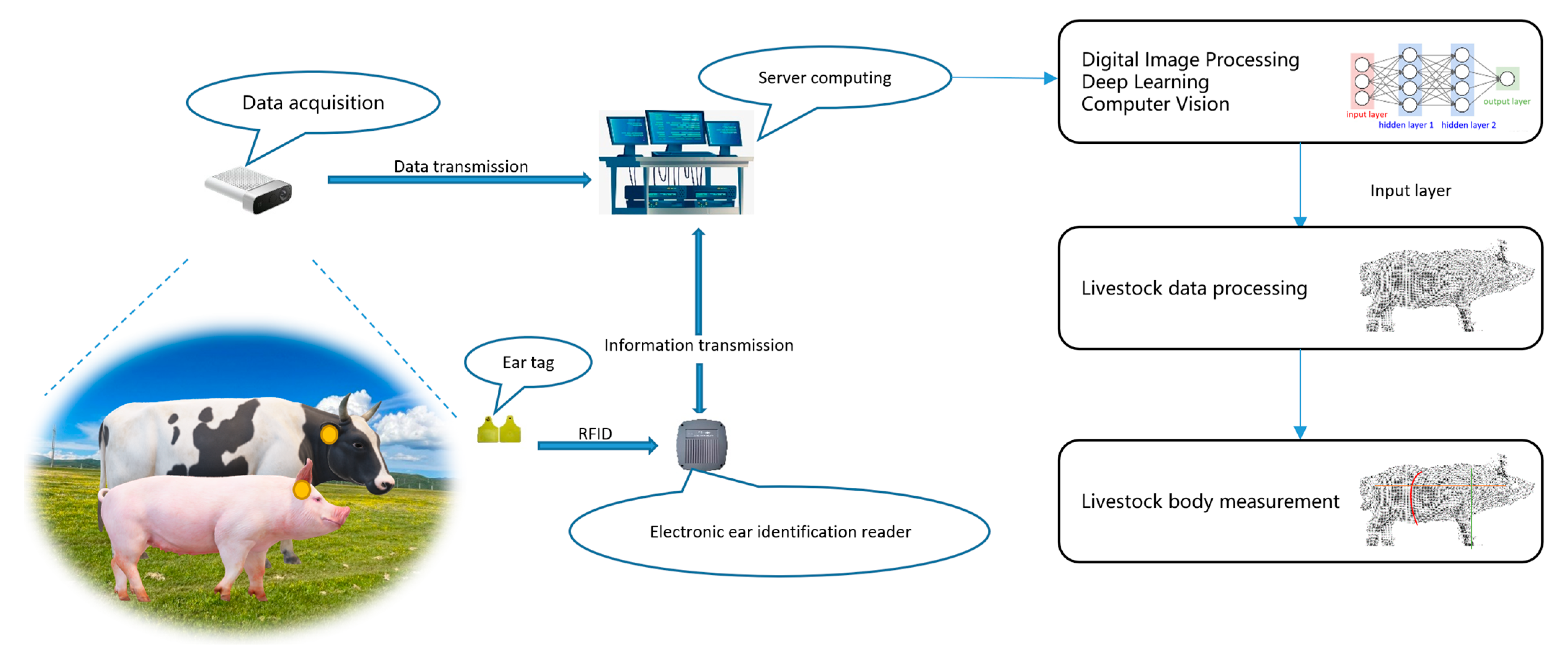
2.1. Sensing Technology for Collecting Animal Body Measurements
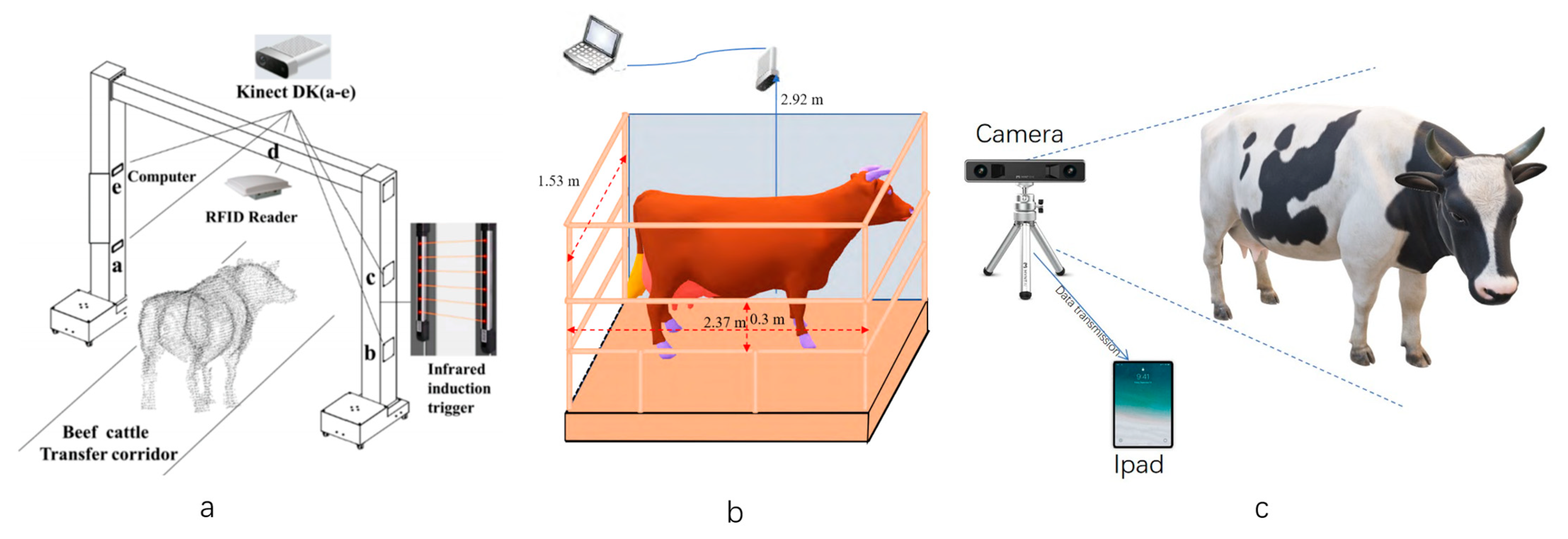
2.2. The Methods of Livestock Live Body Dimension Measurement
3. Processing of Raw Sensing Data
3.1. Processing of Livestock Image Sensing Data
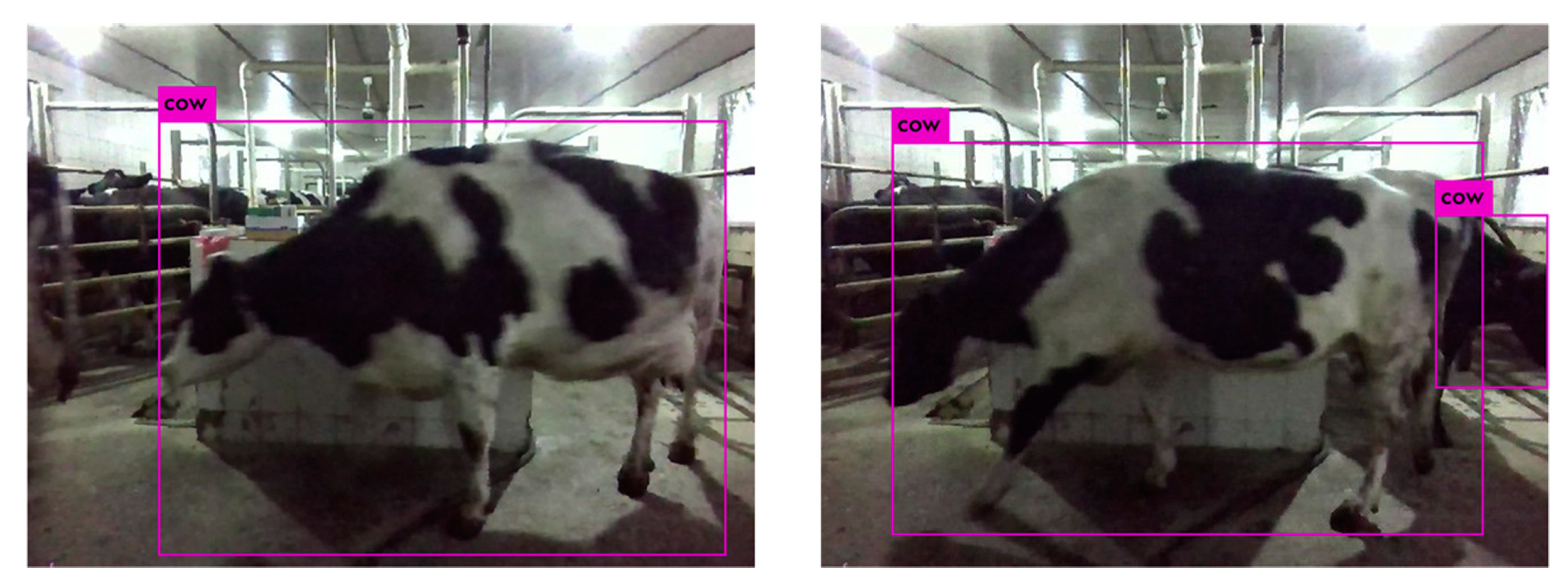
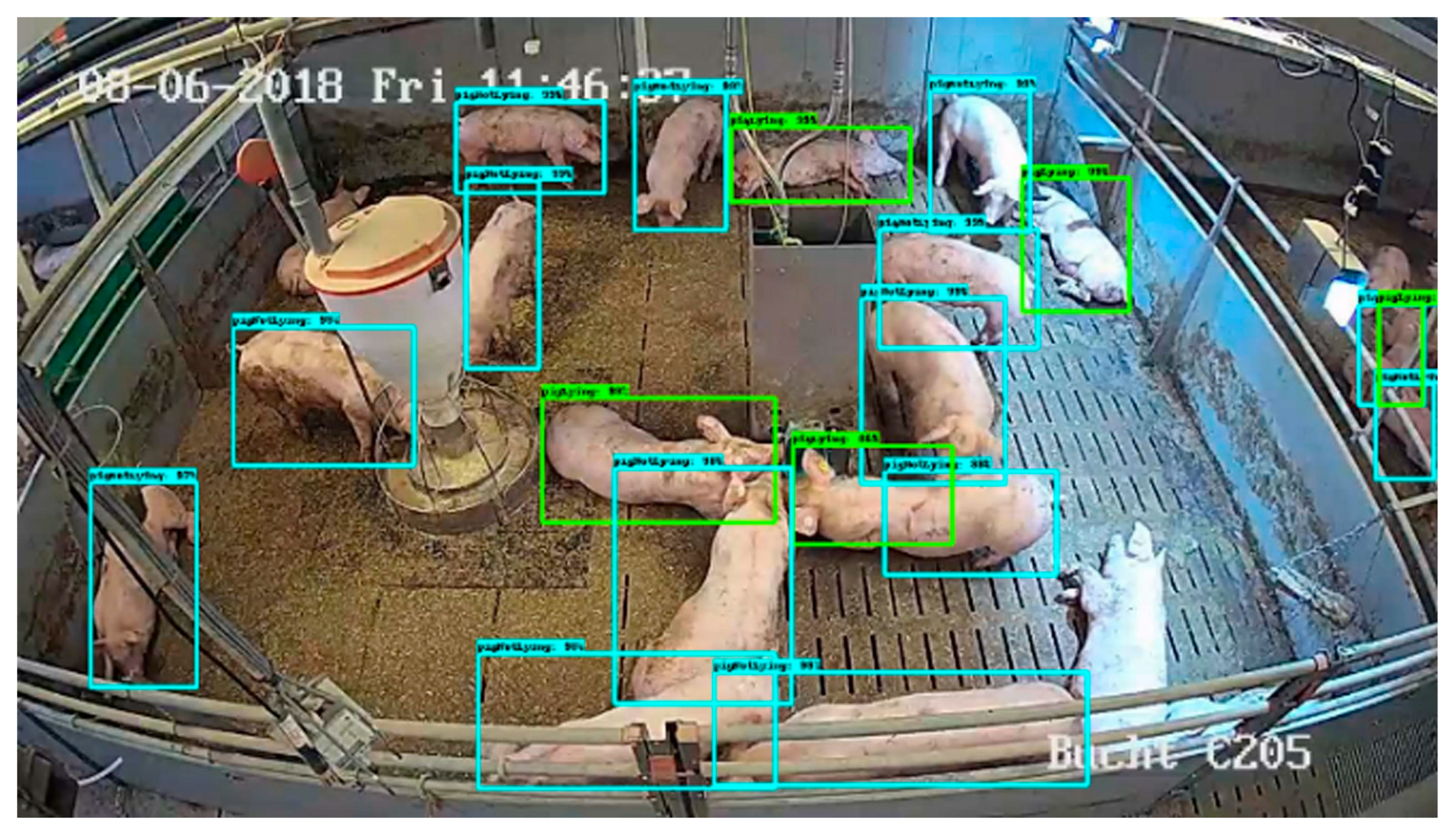
3.1.1. Image Detection
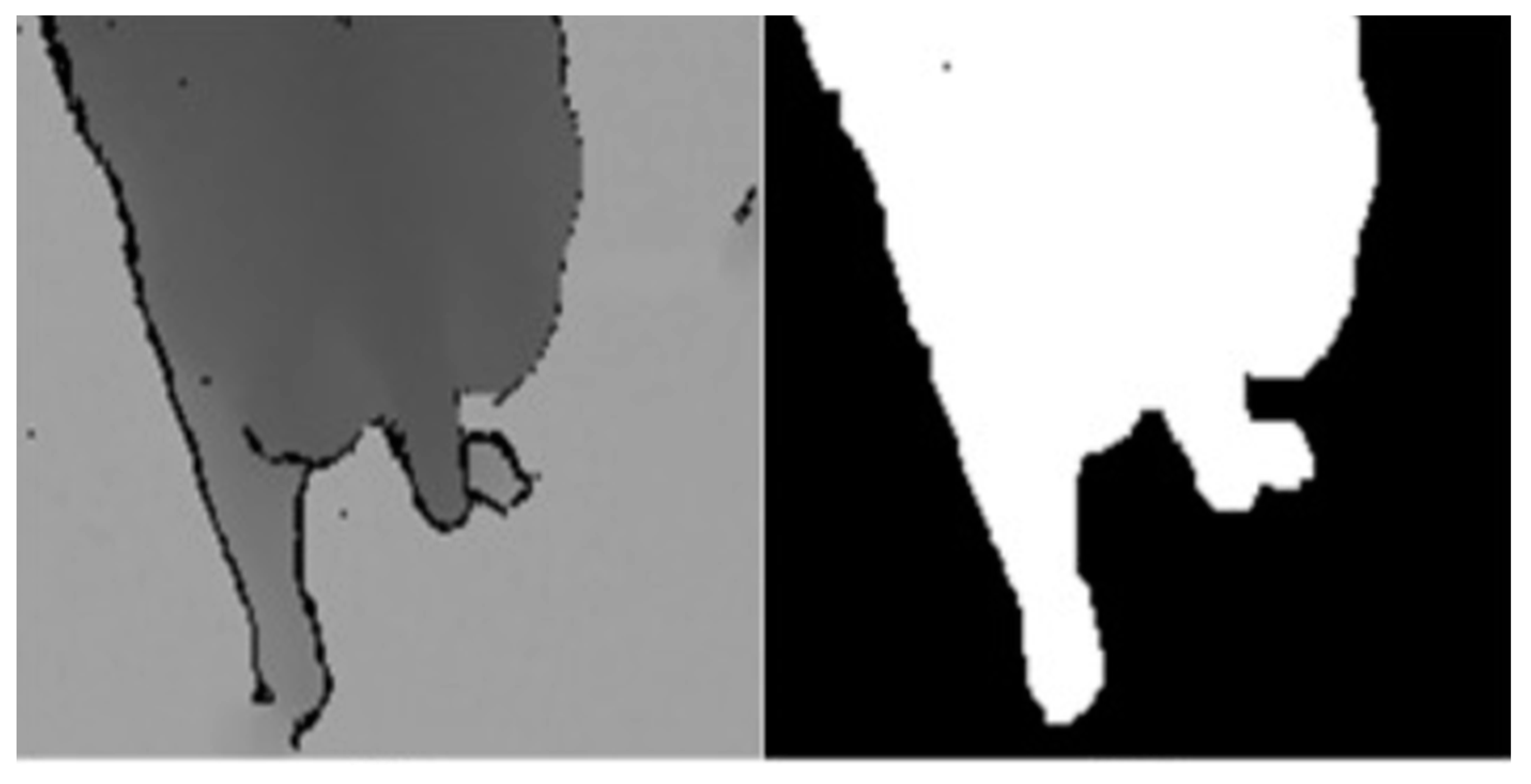
3.1.2. Image Segmentation
3.1.3. Image Posture Judgment
3.2. Processing of Livestock Point Cloud Sensing Data
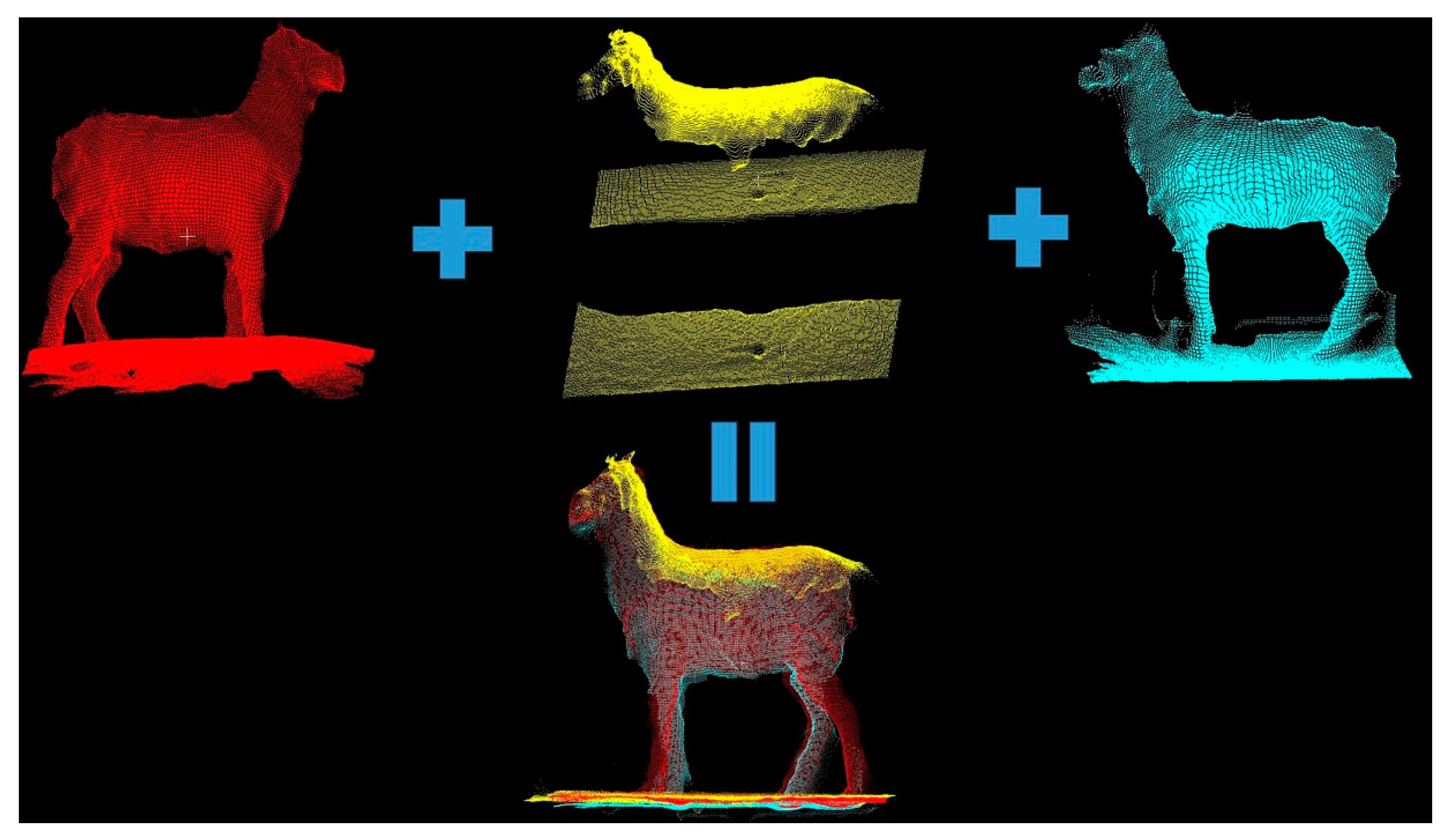
3.2.1. Point Cloud Registration and 3D Reconstruction
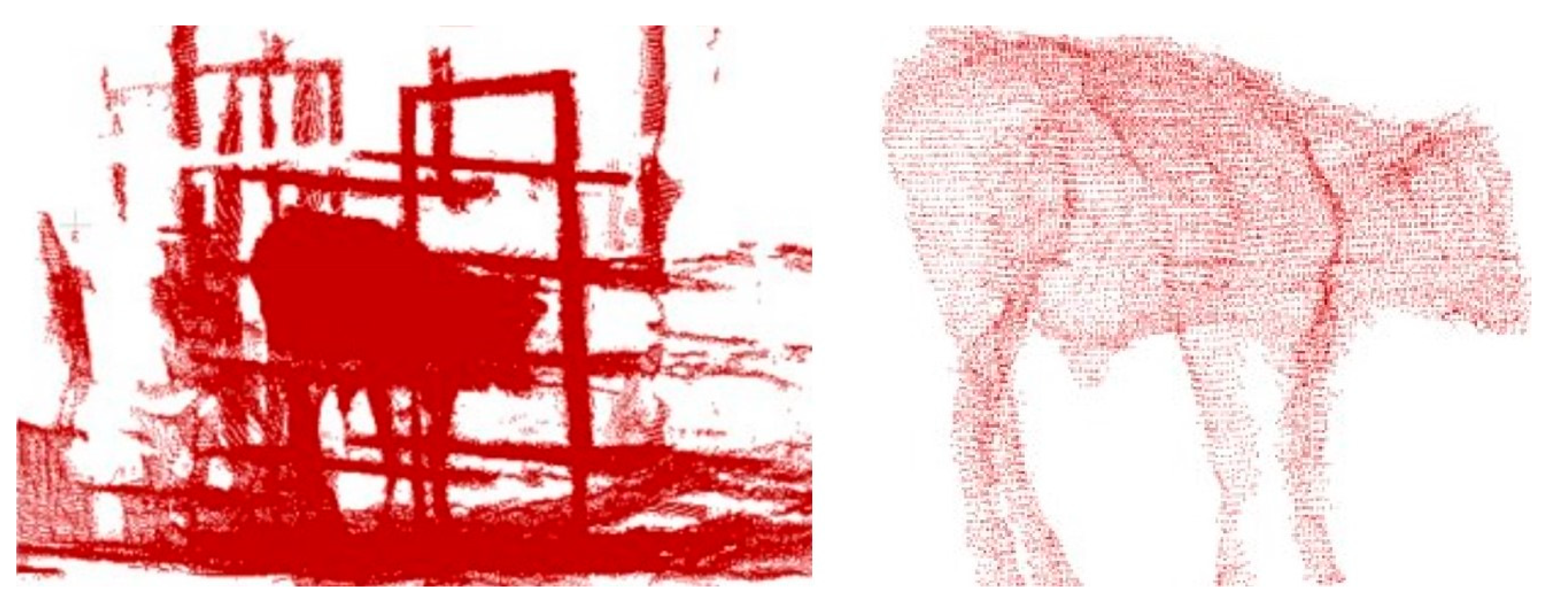
3.2.2. Point Cloud Object Extraction
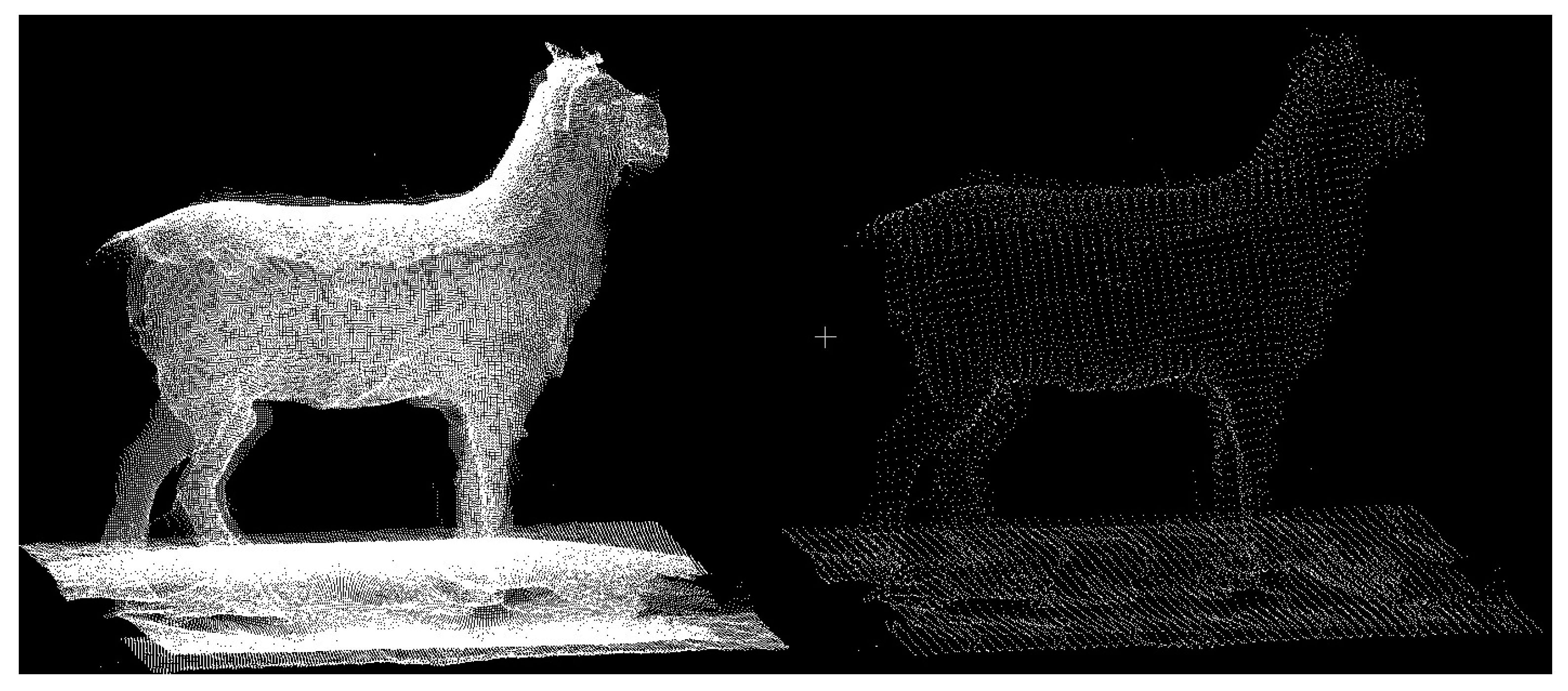
3.2.3. Point Cloud Simplification
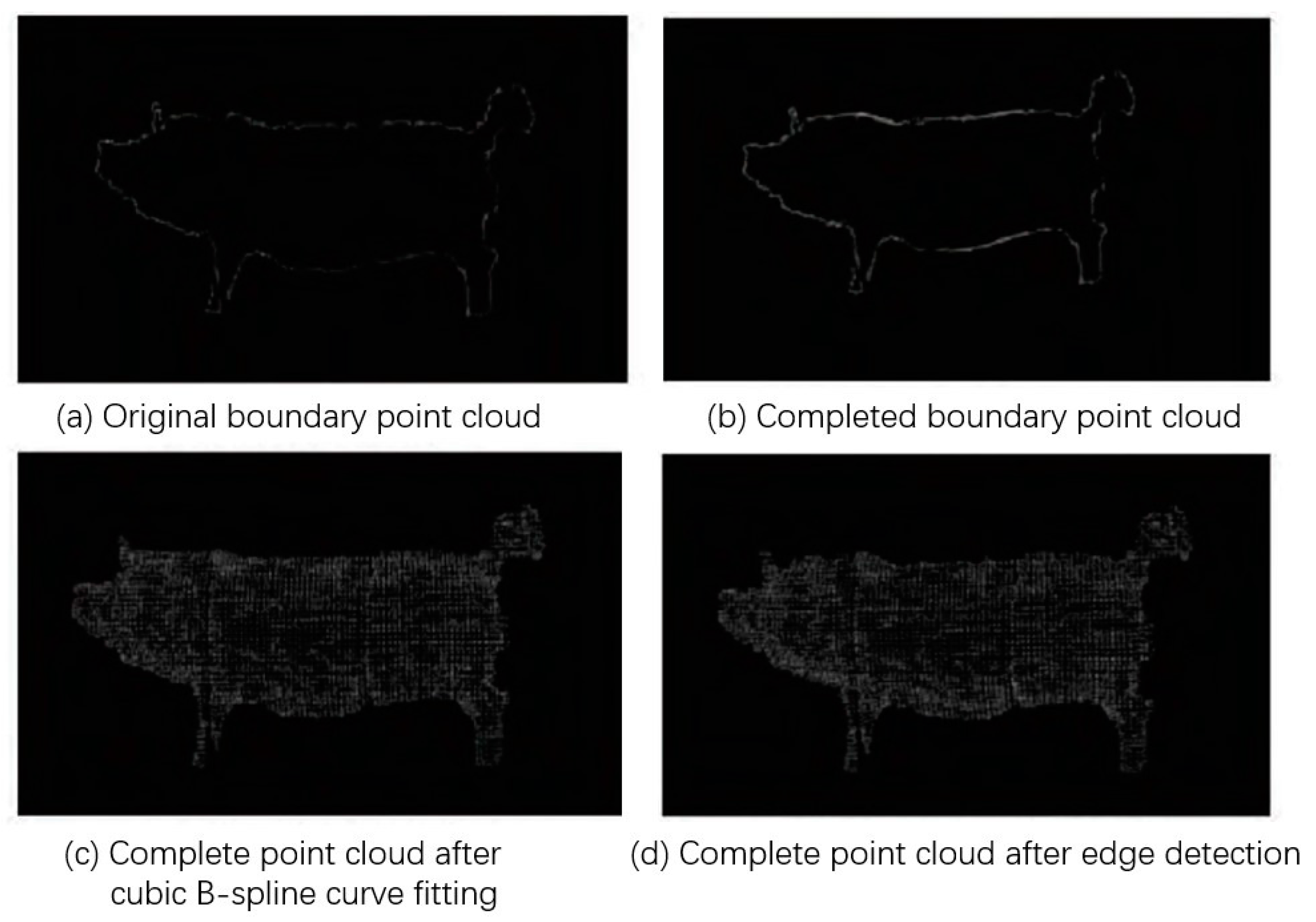
3.2.4. Point Cloud Filling
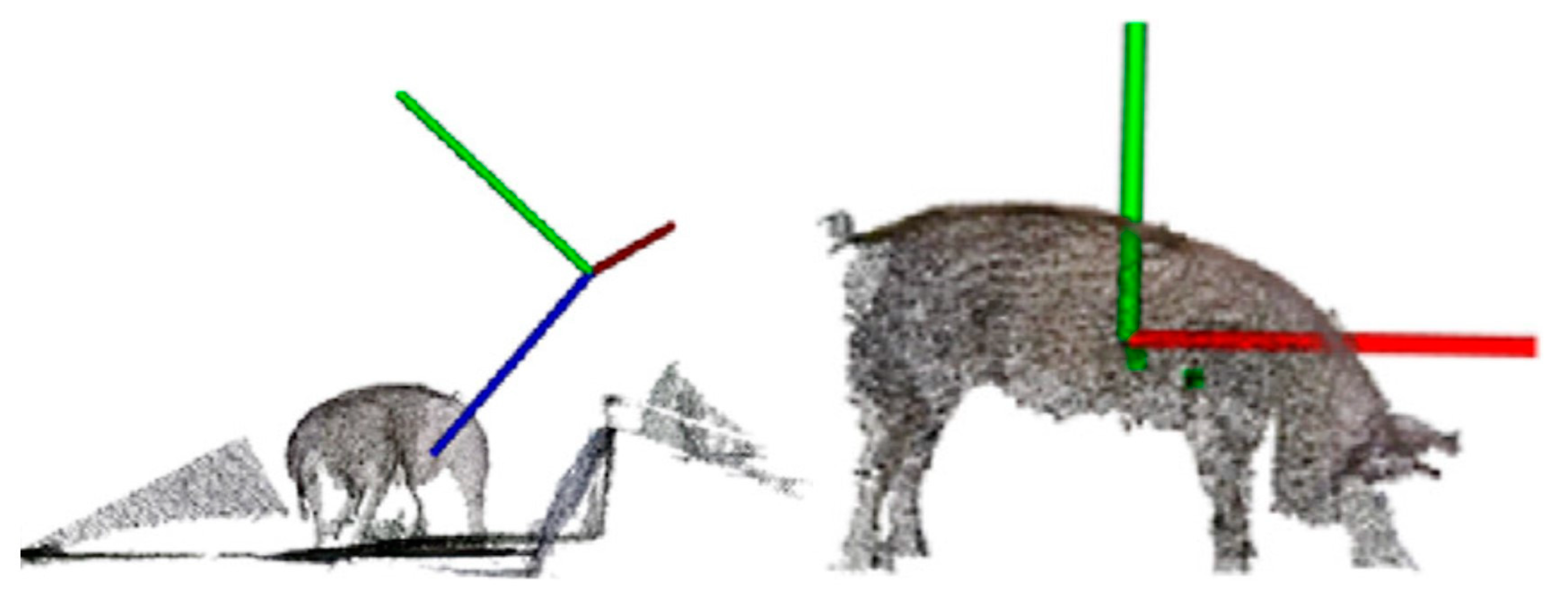
3.2.5. Posture Judgment and Normalization
4. Livestock Body Measurement Sensing Data Analysis
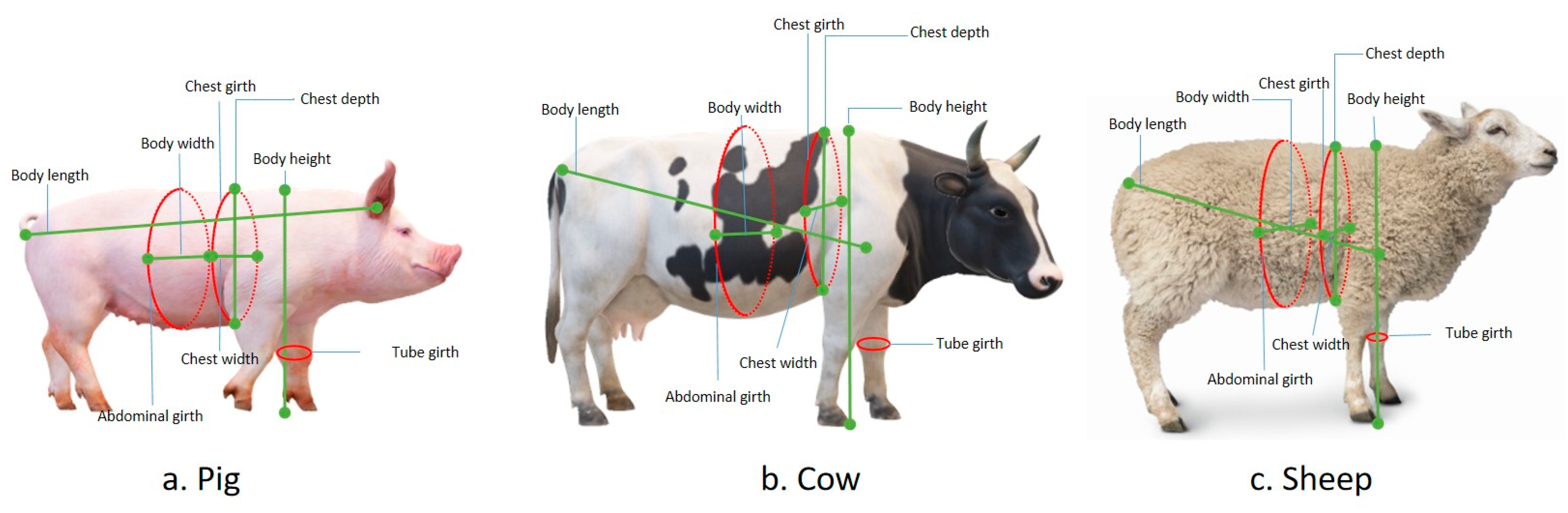
4.1. Livestock Body Dimension Measurement Standards
4.2. Measurement of Livestock Body Dimensions Using Images Sensing Data
4.2.1. Body Dimension Measurement Based on Color Image Sensing Data
4.2.2. Body Dimension Measurement Based on Depth Image Sensing Data
4.2.3. Body Dimension Measurement Based on the Fusion of Color and Depth Image Sensing Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Method | Collecting Device | Collecting Data | Object | Position | Technical Method | Research Results | Time | Literature |
|---|---|---|---|---|---|---|---|---|
| SP | 2RC | 2D image | Cows | BL, BH | Image processing | The relative errors are 2.28% and 0.06%. | 2020 | Shi [52] |
| 2RC | 2D image | Cows | BL, BH, BW | Image processing | The average error is less than 1.21%. | 2020 | Zhang [54] | |
| 2RC | 2D image | Cows | BL, BH | Deep learning Image processing | The average relative error of on-site system validation for a certain pasture is less than 6.85%. | 2020 | Li [61] | |
| 2RC | 2D image Depth image | Pigs | BL, BH, etc. | Image processing | The average relative error within the normal bending range of a pig’s body is less than 2.93%. | 2021 | Xu [62] | |
| 2RC | 2D image | Cows | BL, CD, etc. | Image processing Data mining | The average error is within 4.91%. | 2021 | Zhang [56] | |
| DC | 2D image | Cows | BL, BH | Deep learning Image processing | The average relative error is within 8.36%. | 2021 | Zhao [55] | |
| DC | 2D image Depth image | Cows | BL, BH, etc. | Image processing | The average relative error is within 2.14%. | 2022 | Zhao [60] | |
| DC | Depth image | Cows | BL, BH | Deep learning Image processing | The average relative error is within 3.3%. | 2022 | Zhao [63] | |
| CA | 2RC | 2D image | Cows | BL, BH, BW | Machine vision Image processing | The average relative error is within 3.73%. | 2020 | Hu [53] |
| SF | DC | Depth image | Cows | CW, etc. | Deep learning Image processing | The average absolute percentage error is 3.13%. | 2021 | Kamchen [21] |
| DC | Depth image | Pigs | BL, BH, BW, etc. | Deep learning Image processing | The maximum root mean square error is 1.79 cm. | 2023 | Zhao [58] | |
| DC | Depth image | Cows | BL, BH, AG, etc. | Image processing | The average absolute error is within 2.73 cm. | 2022 | Ye [20] | |
| DC | Depth image | Cows | BL, AG, etc. | Image processing | The average relative error is within 3.3%. | 2022 | Chu [57] |
4.3. Body Dimension Measurement of Livestock Using 3D Point Cloud Sensing Data
4.3.1. Body Dimension Measurement of Livestock Using Geometric Segmentation Algorithms
4.3.2. Body Dimension Measurement of Livestock Using Deep Learning Segmentation Algorithms
4.3.3. Body Dimension Measurement of Livestock Using 2D and 3D Fusion Methods
| Acquisition Method | Collecting Device | Collecting Data | Object | Position | Technical Method | Research Results | Time | Literature |
|---|---|---|---|---|---|---|---|---|
| SP | DC | 3D point cloud | Cows | BL, BH, AG, etc. | 3D Visual Technology | The maximum error is 9.36%, and the minimum error is 1.10% | 2023 | Zhang [35] |
| DC | 3D point cloud | Sheep | BL, BH, CD, etc. | 3D Visual Technology | The maximum relative error is 2.36% | 2020 | Ma [65] | |
| 2RC | 2D image | Cows | BL, BH, CG | Image Processing 3D Visual Technology | The average relative errors are 3.87%, 4.16%, and 5.06%, respectively | 2022 | Shi [22] | |
| 2RC | 2D image | Cows | BL, CG, CW, etc. | Image Processing 3D Visual Technology | The average relative error is less than 4.67% | 2022 | Yang [10] | |
| 2RC | 2D image | Cows | BL, BH, CG | Image Processing 3D Visual Technology | The average errors are 3.34%, 3.74%, and 4.73%, respectively | 2023 | Chen [73] | |
| CA | DC | Digital image 3D point cloud | Pigs Cows | BL, BH, BW, CW, etc. | Image Processing 3D Visual Technology | Reduce the average absolute percentage error to below 10% | 2022 | Du [70] |
| DC | 3D point cloud | Pigs | BL, BH, BW, AG, etc. | 3D Visual Technology | The average relative error is less than 4.67% | 2020 | Shi [32] | |
| DC | 3D point cloud | Pigs | BL, BH, BW, AG, etc. | Deep Learning 3D Visual Technology | The average relative error is less than 5.26% | 2023 | Hu [69] | |
| DC | 3D point cloud | Cows | BL, BH, BW, CG, etc. | 3D Visual Technology | The average relative error is less than 2.8% | 2022 | Li [66] | |
| DC | 3D point cloud | Pigs, cows | BL, CD, CW, etc. | 3D Visual Technology | For cattle body measurement, the overall estimated accuracy is 91.95%, while in pig body measurement, the accuracy is 87.63% | 2023 | Luo [7] |
5. Discussion
5.1. The Current Challenges
5.2. Outlook for the Future
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Grau-Sologestoa, I. Livestock management in Spain from Roman to post-medieval times: A biometrical analysis of cattle, sheep/goat and pig. J. Archaeol. Sci. 2015, 54, 123–134. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Giora, D.; Guo, H.; Ma, Q.; Guercini, S.; Marinello, F. A comparison of low-cost techniques for three-dimensional animal body measurement in livestock buildings. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012015. [Google Scholar] [CrossRef]
- Xuezhen, X.; Yumeng, S.; Chun, Y. Spatio-temporal Coupling Coordination Relationship Between Animal Husbandry and Resource Environmental Carrying Capacity in China. Econ. Geogr. 2022, 42, 153–162. [Google Scholar]
- Fernandes, A.F.A.; Dórea, J.R.R.; Rosa, G.J.D.M. Image Analysis and Computer Vision Applications in Animal Sciences: An Overview. Front. Vet. Sci. 2020, 7, 551269. [Google Scholar] [CrossRef] [PubMed]
- Ruotong, H. The Value of Computer Technology in Social and Economic Development. Mark. Community 2022, 22, 115–117. [Google Scholar]
- Changxi, C.; Hongfu, Z.; Zhaoyi, W.; Yiding, W. Study and application of early warning architecture of animal health culture. Trans. CSAE 2010, 26, 215–220. [Google Scholar]
- Luo, X.; Hu, Y.; Gao, Z.; Guo, H.; Su, Y. Automated measurement of livestock body based on pose normalisation using statistical shape model. Biosyst. Eng. 2023, 227, 36–51. [Google Scholar] [CrossRef]
- Kaiying, W.; Xiaoyang, Z.; Yong, H. Review on noninvasive monitoring technology of poultry behavior and physiological information. Trans. CSAE 2017, 33, 197–209. [Google Scholar]
- Xiaodong, D.; Xiaoxiao, L.; Shiran, F.; Zhichun, Y.; Xiangdong, D.; Jifan, Y.; Liping, Z. A Review of the Methods of Pig Body Size Measurement and Body Weight Estimation. Chin. J. Anim. Sci. 2023, 59, 41–4656. [Google Scholar]
- Yang, G.; Xu, X.; Song, L.; Zhang, Q.; Duan, Y.; Song, H. Automated measurement of dairy cows body size via 3D point cloud data analysis. Comput. Electron. Agric. 2022, 200, 107218. [Google Scholar] [CrossRef]
- Li, J.; Ma, W.; Li, Q.; Zhao, C.; Tulpan, D.; Yang, S.; Ding, L.; Gao, R.; Yu, L.; Wang, Z. Multi-view real-time acquisition and 3D reconstruction of point clouds for beef cattle. Comput. Electron. Agric. 2022, 197, 106987. [Google Scholar] [CrossRef]
- Jianmin, Z.; Zhongxin, Z.; Qi, L. Sheep body size measurement system based on Kinect sensor. Transducer Microsyst. Technol. 2015, 34, 100–103. [Google Scholar]
- Neethirajan, S. Transforming the Adaptation Physiology of Farm Animals through Sensors. Animals 2020, 10, 1512. [Google Scholar] [CrossRef] [PubMed]
- Knight, C.H. Review: Sensor techniques in ruminants: More than fitness trackers. Animal 2020, 14, s187–s195. [Google Scholar] [CrossRef]
- Zhu, J.; Zeng, Q.; Han, F.; Jia, C.; Bian, Y.; Wei, C. Design of laser scanning binocular stereo vision imaging system and target measurement. Optik 2022, 270, 169994. [Google Scholar] [CrossRef]
- Alenyà, G.; Foix, S.; Torras, C. ToF cameras for active vision in robotics. Sens. Actuators A Phys. 2014, 218, 10–22. [Google Scholar] [CrossRef]
- Quintana Benito, J.; Fernández-Balbuena, A.A.; Martínez-Antón, J.C.; Váquez Molini, D. Improvement of driver night vision in foggy environments by structured light projection. Heliyon 2022, 8, e11877. [Google Scholar] [CrossRef] [PubMed]
- Ruchay, A.; Kober, V.; Dorofeev, K.; Kolpakov, V.; Miroshnikov, S. Accurate body measurement of live cattle using three depth cameras and non-rigid 3-D shape recovery. Comput. Electron. Agric. 2020, 179, 105821. [Google Scholar] [CrossRef]
- Jiawei, L.; Weihong, M.; Qifeng, L.; Xianglong, X.; Zhiquan, W. Automatic Acquisition and Target Extraction of Beef Cattle 3D Point Cloud from Complex Environment. Smart Agric. 2022, 4, 64–76. [Google Scholar]
- Wenshuai, Y.; Xi, K.; Zhijiang, H.; Mengfei, L.; Gang, L. Automatic Measurement of Multi-Posture Beef Cattle Body Size Based on Depth Image. Smart Agric. 2022, 4, 144–155. [Google Scholar]
- Kamchen, S.G.; Fernandes Dos Santos, E.; Lopes, L.B.; Vendrusculo, L.G.; Condotta, I.C.F.S. Application of depth sensor to estimate body mass and morphometric assessment in Nellore heifers. Livest. Sci. 2021, 245, 104442. [Google Scholar] [CrossRef]
- Wei, S.; Yu-Zhou, C.; Wan-Kai, Z.; Xiao-Ying, Z.; Guo-Ying, Z. Cattle Point Cloud Reconstruction and Body Size Measurement System Development Based on Unmanned Air Vehicle(UAV)Platform. Anim. Husb. Feed Sci. 2022, 43, 93–103. [Google Scholar]
- Pezzuolo, A.; Guarino, M.; Sartori, L.; González, L.A.; Marinello, F. On-barn pig weight estimation based on body measurements by a Kinect v1 depth camera. Comput. Electron. Agric. 2018, 148, 29–36. [Google Scholar] [CrossRef]
- Achour, B.; Belkadi, M.; Filali, I.; Laghrouche, M.; Lahdir, M. Image analysis for individual identification and feeding behaviour monitoring of dairy cows based on Convolutional Neural Networks (CNN). Biosyst. Eng. 2020, 198, 31–49. [Google Scholar] [CrossRef]
- Hu, H.; Dai, B.; Shen, W.; Wei, X.; Sun, J.; Li, R.; Zhang, Y. Cow identification based on fusion of deep parts features. Biosyst. Eng. 2020, 192, 245–256. [Google Scholar] [CrossRef]
- Shen, W.; Hu, H.; Dai, B.; Wei, X.; Sun, J.; Jiang, L.; Sun, Y. Individual identification of dairy cows based on convolutional neural networks. Multimed. Tools Appl. 2020, 79, 14711–14724. [Google Scholar] [CrossRef]
- Bello, R.W.; Mohamed, A.S.A.; Talib, A.Z. Contour Extraction of Individual Cattle from an Image Using Enhanced Mask R-CNN Instance Segmentation Method. IEEE Access 2021, 9, 56984–57000. [Google Scholar] [CrossRef]
- Liu, D.; He, D.; Norton, T. Automatic estimation of dairy cattle body condition score from depth image using ensemble model. Biosyst. Eng. 2020, 194, 16–27. [Google Scholar] [CrossRef]
- Riekert, M.; Klein, A.; Adrion, F.; Hoffmann, C.; Gallmann, E. Automatically detecting pig position and posture by 2D camera imaging and deep learning. Comput. Electron. Agric. 2020, 174, 105391. [Google Scholar] [CrossRef]
- Lauer, J.; Zhou, M.; Ye, S.; Menegas, W.; Schneider, S.; Nath, T.; Rahman, M.M.; Di Santo, V.; Soberanes, D.; Feng, G.; et al. Multi-animal pose estimation, identification and tracking with DeepLabCut. Nat. Methods 2022, 19, 496–504. [Google Scholar] [CrossRef]
- Mengyuan, C.; Yongsheng, S.; Qian, L.; Gang, L. Research advances in the automatic measurement technology for livestock body size. Trans. Chin. Soc. Agric. Eng. 2022, 38, 228–240. [Google Scholar]
- Shuai, S.; Ling, Y.; Shihao, L.; Haojie, Z.; Xuhong, T.; Caixing, L.; Aidong, S.; Hanxing, L. Research on 3D surface reconstruction and body size measurement of pigs based on multi-view RGB-D cameras. Comput. Electron. Agric. 2020, 175, 105543. [Google Scholar] [CrossRef]
- Dang, C.; Choi, T.; Lee, S.; Lee, S.; Alam, M.; Lee, S.; Han, S.; Hoang, D.T.; Lee, J.; Nguyen, D.T. Case Study: Improving the Quality of Dairy Cow Reconstruction with a Deep Learning-Based Framework. Sensors 2022, 22, 9325. [Google Scholar] [CrossRef] [PubMed]
- Falque, R.; Vidal-Calleja, T.; Alempijevic, A. Semantic keypoint extraction for scanned animals using multi-depth-camera systems. arXiv 2022, arXiv:2211.08634. [Google Scholar]
- Ting, Z.; Qi, L. Research on cattle body size measurement based on three-dimensional point cloud. Heilongjiang Anim. Sci. Vet. Med. 2023, 3, 58–61. [Google Scholar]
- Cheng, Y.-Q.; Li, W.-L.; Jiang, C.; Wang, D.-F.; Mao, J.-C.; Xu, W. A novel point cloud simplification method using local conditional information. Meas. Sci. Technol. 2022, 33, 125203. [Google Scholar] [CrossRef]
- Xinyue, Z.; Gang, L.; Ling, J.; Yongsheng, S.; Xiaohui, R.; Li, M. Automatic Extraction Method of Cow’s Back Body Measuring Point Based on Simplification Point Cloud. Trans. Chin. Soc. Agric. Mach. 2019, 50, 267–275. [Google Scholar]
- Hao, Q. Reserach of Three Dimensional Measuring Device Based on Dual Kinect Camera. Master’s Thesis, Changchun University of Technology, Changchun, China, 2020. [Google Scholar]
- Mengyuan, C.; Gang, L.; Yongsheng, S.; Fan, F. Predicting Method of Dairy Cow Weight Based on Three-dimensional Reconstruction. Trans. Chin. Soc. Agric. Mach. 2020, 51, 378–384. [Google Scholar]
- Mengfei, L.; Xi, K.; Yanchao, W.; Jue, C.; Xinyue, Z.; Gang, L. Side-view Point Cloud Completion Method Combining Cubic B-spline Curve Fitting and Edge Detection Based on Threshold Analysis. Trans. Chin. Soc. Agric. Mach. 2021, 52, 81–88. [Google Scholar]
- Hu, Y.; Luo, X.; Gao, Z.; Du, A.; Guo, H.; Ruchay, A.; Marinello, F.; Pezzuolo, A. Curve Skeleton Extraction from Incomplete Point Clouds of Livestock and Its Application in Posture Evaluation. Agriculture 2022, 12, 998. [Google Scholar] [CrossRef]
- Weihong, S.; Kairan, W.; Man, L.; Tiefeng, S.; Jun, S. Rotation Normalization Registration Algorithm of Silkworm Cocoon Point Cloud Based on Rotating Disk. Acta Sericologica Sin. 2022, 48, 422–429. [Google Scholar]
- Guo, H.; Li, Z.; Ma, Q.; Zhu, D.; Su, W.; Wang, K.; Marinello, F. A bilateral symmetry based pose normalization framework applied to livestock body measurement in point clouds. Comput. Electron. Agric. 2019, 160, 59–70. [Google Scholar] [CrossRef]
- Lu, J.; Guo, H.; Du, A.; Su, Y.; Ruchay, A.; Marinello, F.; Pezzuolo, A. 2-D/3-D fusion-based robust pose normalisation of 3-D livestock from multiple RGB-D cameras. Biosyst. Eng. 2022, 223, 129–141. [Google Scholar] [CrossRef]
- Zhihui, Z.; Wei, L.; Yongsheng, H. Influence Factors and Applications for Body Size of Cattle. Chin. J. Anim. Sci. 2018, 54, 9–13. [Google Scholar]
- Dan, W.; Shoumin, F.; Juan, G.; Guangwei, Y.; Mingming, D.; Lei, X.; Mengjie, Y.; Yuanyuan, L.; Xixia, H.; Yachun, W. Body Size Canonical Correlation Analysis and Body Weight Estimation Formula Formulation of Xinjiang Brown Cattle. Chin. J. Anim. Sci. 2021, 57, 82–86. [Google Scholar]
- Jinbo, W.; Shiming, H.; Shanglin, J.; Hongchun, H.; Jincheng, Z.; Yuanjun, S.; Jian, L.; Ming, H.; Qiang, R.; Xin, M. Detction and Correlation Analysis of Body Weight and Body Size Indexes for Sanjiang Cattle. China Cattle Sci. 2017, 43, 14–17. [Google Scholar]
- Suli, S. Methods for preserving livestock genetic resources using modern biological techniques. Contemp. Anim. Husb. 2012, 4, 45–46. [Google Scholar]
- Wisdom in Agriculture, Rural Areas, and Farmers Body Size Measurement of Pigs. Available online: https://www.pwsannong.com/c/2016-04-13/564492.shtml (accessed on 12 October 2023).
- Wisdom in Agriculture, Rural Areas, and Farmers Sheep Body Size Measurement. Available online: https://www.pwsannong.com/c/2016-04-13/564280.shtml (accessed on 12 October 2023).
- Wisdom in Agriculture, Rural Areas, and Farmers Measurement of Bovine Body Size. Available online: https://www.pwsannong.com/c/2016-04-13/563841.shtml (accessed on 12 October 2023).
- Wei, S.; Shuai-Qi, Z. Application of Edge-based Image Segmentation in Cow Body Measurement. Digit. Technol. Appl. 2020, 38, 48–51. [Google Scholar]
- Yuanmin, H.; Shouming, Z. Measurement of Cow Body Size Based on Machine Vision. Electron. Meas. 2020, 43, 115–120. [Google Scholar]
- Chenguang, Z.; Jinhui, L.; Yan, C.; Kuangwei, Z. Measurement and application of cow body size parameters based on machine binocular vision. Electron Technol. Appl. 2020, 46, 59–62. [Google Scholar]
- Jianmin, Z.; Bo, W.; Qi, L. A bull body ruler measurement system based on Mask R-CNN. Anim. Husb. Vet. Med. 2021, 53, 42–48. [Google Scholar]
- Zhang, Y.-A.; Sun, Z.; Zhang, C.; Yin, S.; Wang, W.; Song, R. Body weight estimation of yak based on cloud edge computing. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 6. [Google Scholar] [CrossRef]
- Mengyuan, C.; Mengfei, L.; Qian, L.; Gang, L. Method of Cows Body Size Measurement Based on Key Frame Extraction and Head and Neck Removal. Trans. Chin. Soc. Agric. Mach. 2022, 53, 226–233+259. [Google Scholar]
- Yuliang, Z.; Fanguo, Z.; Nan, J.; Jun, Z.; Haifeng, W.; Bin, L. Rapid Measurements of Pig Body Size Based on DeepLabCut Algorithm. Trans. Chin. Soc. Agric. Mach. 2023, 54, 249–255+292. [Google Scholar]
- Jia, N.; Kootstra, G.; Koerkamp, P.G.; Shi, Z.; Du, S. Segmentation of body parts of cows in RGB-depth images based on template matching. Comput. Electron. Agric. 2021, 180, 105897. [Google Scholar] [CrossRef]
- Jianmin, Z.; Cheng, Z.; Haiguang, X. Cattle body size measurement method based on Kinect v4. J. Comput. Appl. 2022, 42, 1598–1606. [Google Scholar]
- Qi, L.; Wei, L.; Jianmin, Z. Non-contact measurement of bovine body size based on binocular vision and Mask RCNN. Heilongjiang Anim. Sci. Vet. Med. 2020, 12, 46–50+159–160. [Google Scholar]
- Jinyang, X.; Aijun, X.; Suyin, Z.; Junhua, Y.; Fang, X. Research on the algorithm of curved body size measurement of pig based on Kinect camera. J. Northeast Agric. Univ. 2021, 52, 77–85. [Google Scholar]
- Jianmin, Z.; Xiaopeng, G. Design of measurement method of cow body scale based on binocular depth estimation. J. Optoelectron. Laser 2022, 33, 429–435. [Google Scholar]
- Cailian, L.; Han, Y.; Peng, L.; Yu, F. 3D Reconstruction of Maize Plants Based on Consumer Depth Camera. Trans. Chin. Soc. Agric. Mach. 2019, 50, 222–228. [Google Scholar]
- Xuelei, M.; Heru, X.; Yanqin, Z.; Xinhua, J.; Na, L. Point cloud segmentation and measurement of the body size parameters of sheep based on the improved region growing method. J. China Agric. Univ. 2020, 25, 99–105. [Google Scholar]
- Li, J.; Li, Q.; Ma, W.; Xue, X.; Zhao, C.; Tulpan, D.; Yang, S.X. Key Region Extraction and Body Dimension Measurement of Beef Cattle Using 3D Point Clouds. Agriculture 2022, 12, 1012. [Google Scholar] [CrossRef]
- Qi, C.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. In Proceedings of the Conference on Neural Information Processing Systems 2017, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Huang, L.; Guo, H.; Rao, Q.; Hou, Z.; Li, S.; Qiu, S.; Fan, X.; Wang, H. Body Dimension Measurements of Qinchuan Cattle with Transfer Learning from LiDAR Sensing. Sensors 2019, 19, 5046. [Google Scholar] [CrossRef] [PubMed]
- Hao, H.; Jincheng, Y.; Ling, Y.; Gengyuan, C.; Sumin, Z.; Huan, Z. An improved PointNet++ point cloud segmentation model applied to automatic measurement method of pig body size. Comput. Electron. Agric. 2023, 205, 107560. [Google Scholar] [CrossRef]
- Du, A.; Guo, H.; Lu, J.; Su, Y.; Ma, Q.; Ruchay, A.; Marinello, F.; Pezzuolo, A. Automatic livestock body measurement based on keypoint detection with multiple depth cameras. Comput. Electron. Agric. 2022, 198, 107059. [Google Scholar] [CrossRef]
- Ling, Y.; Jimin, Z.; Caixing, L.; Xuhong, T.; Sumin, Z. Point cloud-based pig body size measurement featured by standard and non-standard postures. Comput. Electron. Agric. 2022, 199, 107135. [Google Scholar] [CrossRef]
- Li, J.; Ma, W.; Bai, Q.; Tulpan, D.; Gong, M.; Sun, Y.; Xue, X.; Zhao, C.; Li, Q. A posture-based measurement adjustment method for improving the accuracy of beef cattle body size measurement based on point cloud data. Biosyst. Eng. 2023, 230, 171–190. [Google Scholar] [CrossRef]
- Yuzhou, C.; Wei, S.; Xianyu, Z.; Wankai, Z.; Guoying, Z. Automatic measurement algorithm of bovine body size based on bovine body point cloud. Heilongjiang Anim. Sci. Vet. Med. 2023, 8, 48–54+136. [Google Scholar]














| Principle of Operation | Purpose | Advantage | Limitations | |
|---|---|---|---|---|
| Depth camera (DC) | Distance from each point in the image to the camera, coupled with the two-dimensional coordinates of that point within the 2D image, derivation of the three-dimensional spatial coordinates of each point within the image | Capturing the depth distance within the specific space and spatial coordinate information | Swift processing times, spatial coordinates | Exhibits lower relative accuracy and generates larger datasets |
| 3D scan (3S) | Scanning the spatial exterior, structure, and colors of an object, spatial coordinates of the object’s surface | Generating a high-precision point cloud representation of the object’s geometric surface | Highly accurate spatial coordinates | Long scanning process, demanding specific environmental conditions, large datasets |
| 2D RGB camera (2RC) | An apparatus that employs the principles of optical imaging to create images | Utilizes electronic sensors to convert optical images into electronic data | Quick processing times, smaller datasets | Susceptible to environmental changes such as lighting and color |
| Depth Camera | Fundamentals | Advantages | Disadvantages | Company |
|---|---|---|---|---|
| Binocular stereo vision | RGB image feature point matching and indirect calculation through triangulation | Low hardware requirements, low cost, applicable indoors and outdoors, as long as lighting conditions are suitable and not too dim. | High sensitivity to ambient light, unsuitable for monotonous and texture-lacking scenes, high computational complexity, and measurement range limited by the baseline. | Leap Motion ZED DJI |
| Structured-light | Active projection of known encoded patterns to enhance feature-matching Effectiveness | Convenient for miniaturization, low resource consumption, active light source, usable at night, high precision within a certain range, and high resolution. | Prone to interference from ambient light, with accuracy decreasing as detection distance increases. | Apple Microsoft Intel |
| TOF | Direct measurement based on time-of-flight of light | Detects distant objects, with relatively minimal interference from ambient light. | High equipment demands, substantial resource consumption, low edge accuracy, constrained by resource consumption and filtering, unable to achieve high frame rates and resolutions. | Microsoft PMD Lenovo |
| Binocular Stereo Vision | Structured-Light | TOF | |
|---|---|---|---|
| Resolution | Medium–high | Middle | Low |
| Precision | Medium | Medium–high | Medium |
| Frame rate | Low | Medium | High |
| Anti-light (principle angle) | High | Low | Medium |
| Hardware cost | High | Low | Medium |
| Collection Method | Merit | Shortcoming |
|---|---|---|
| Channel Archway Style (CA) | Enables the collection of data during livestock movement, reducing stress on the animals. | Data loss due to obstruction by railings. |
| Suspended Fixed Style (SF) | Requires only a single camera for suspended installation, resulting in lower costs. | Single perspective of obtained livestock data, with data collection requiring the livestock to be in a stationary state. |
| Simple Portable Style (SP) | Convenient for transportation and easy to install. | Requires multi-angle |
| Species | Pig | Cow | Sheep |
|---|---|---|---|
| Chest girth (CG) | The diameter of the chest is measured at the posterior corner of the shoulder blade. | Surrounds vertically around the circumference of the base of the chest. | The diameter of the chest circumference at the posterior corner of the shoulder blade. |
| Abdominal girth (AG) | The circumference of the largest part of the abdomen. | The circumference of the widest part of the abdomen. | The circumference of the abdomen. |
| Body length (BL) | The distance from the occipital ridge to the caudal root. | That is, the oblique length of the body, the straight length from the anterior edge of the shoulder end to the outer edge of the ischial end. | That is, the oblique length of the body, the straight-line distance from the anterior edge of the shoulder end to the posterior edge of the ischial tubercle. |
| Body height (BH) | The vertical distance from the manor to the ground. | The middle of the mane is perpendicular to the height of the ground along the posterior edge of the forelimb. | The vertical distance from the highest point of the mane to the ground. |
| Body width (BW) | The distance between the hips. | The horizontal maximum width of the outer edges of both hips. | The maximum horizontal distance between the hips and thighs. |
| Tube girth (TG) | The circumference of the thinnest part of the tubular bone. | The circumference of the upper 1/3 of the tibia of the left forelimb. | The circumference of the thinnest part of 1/3 of the tube bone. |
| Chest depth (CD) | The vertical distance from the mane to the lower edge of the ribs. | The shortest distance from the posterior edge of the mane to the base of the chest perpendicular. | The straight-line distance from the highest point of the nail to the lower edge of the sternum. |
| Chest width (CW) | The maximum distance between the vertical tangents on the left and right sides of the posterior corner of the scapula. | The minimum width behind the shoulders is measured at the same depth as the chest depth. | The straight-line distance at the widest point of the posterior edge of the shoulder blades on both sides. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Sun, Y.; Qi, X.; Xue, X.; Chang, K.; Xu, Z.; Li, M.; Wang, R.; Meng, R.; Li, Q. Computer-Vision-Based Sensing Technologies for Livestock Body Dimension Measurement: A Survey. Sensors 2024, 24, 1504. https://0-doi-org.brum.beds.ac.uk/10.3390/s24051504
Ma W, Sun Y, Qi X, Xue X, Chang K, Xu Z, Li M, Wang R, Meng R, Li Q. Computer-Vision-Based Sensing Technologies for Livestock Body Dimension Measurement: A Survey. Sensors. 2024; 24(5):1504. https://0-doi-org.brum.beds.ac.uk/10.3390/s24051504
Chicago/Turabian StyleMa, Weihong, Yi Sun, Xiangyu Qi, Xianglong Xue, Kaixuan Chang, Zhankang Xu, Mingyu Li, Rong Wang, Rui Meng, and Qifeng Li. 2024. "Computer-Vision-Based Sensing Technologies for Livestock Body Dimension Measurement: A Survey" Sensors 24, no. 5: 1504. https://0-doi-org.brum.beds.ac.uk/10.3390/s24051504