Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health

 , ,
, ,  and
and 
Abstract
:1. Introduction: Lidars in Aviation
1.1. Motivation of the Paper
1.2. Extreme Meteorological Phenomena in Aviation
- intense downward movements (several units or even tens of m/s);
- areas with high pressure and cold air near the ground below the descending air flow;
- significantly divergent air flow at ground level;
- one or more rotors developed at the edge of the flowing cold air, creating an area of significant horizontal and vertical wind shear, lower pressure and a considerable gradient of several meteorological variables (temperature, humidity, etc.)
- The spatial extent of downbursts is small. The dimensions of the areas with their strongest wind often do not exceed a few hundred meters, which are mostly outside of the standard resolution of meteorological radars and much less than the average distance of neighboring automatic weather stations.
- The time span of their existence is short. The time between the beginning of the descending air movement and reaching the ground surface can be estimated as a few minutes. Assuming that the cloud base (the edge of the downburst) is at an altitude of 3 km and the average rate of descent is 10 m/s, the downward flow reaches the Earth’s surface in about 5 min. The total lifespan of a downburst is about 5 to 20 min.
- Segments of the downburst with the potential for the most severe destruction appear only tens or hundreds of meters above the ground, making it difficult to detect by remote detection methods. First, remote observation at low altitudes is problematic both for radars and lidars, particularly in broken terrain. Secondly, radars are seriously handicapped by ground clutters. This effect, on the other hand, does not appear in the case of lidars, due to their narrow and focused beams.
- In the case of a high density of meteorological stations and/or instruments in the area of interest (e.g., airport area), wind gust and other changes in meteorological elements at the surface, typical of downburst, can be at least partially evaluated by computer algorithms.
- The evolution of downbursts can be observed using lidar, especially in dry microbursts.
- The development of wet microbursts can be monitored using radar provided the accompanying clouds are adequately close and the resolution of radar is adequate.
- frontal activity;
- thunderstorms;
- temperature inversions;
- surface obstructions.
2. Methods and Instruments
2.1. Low-Level Wind Shear in Aviation
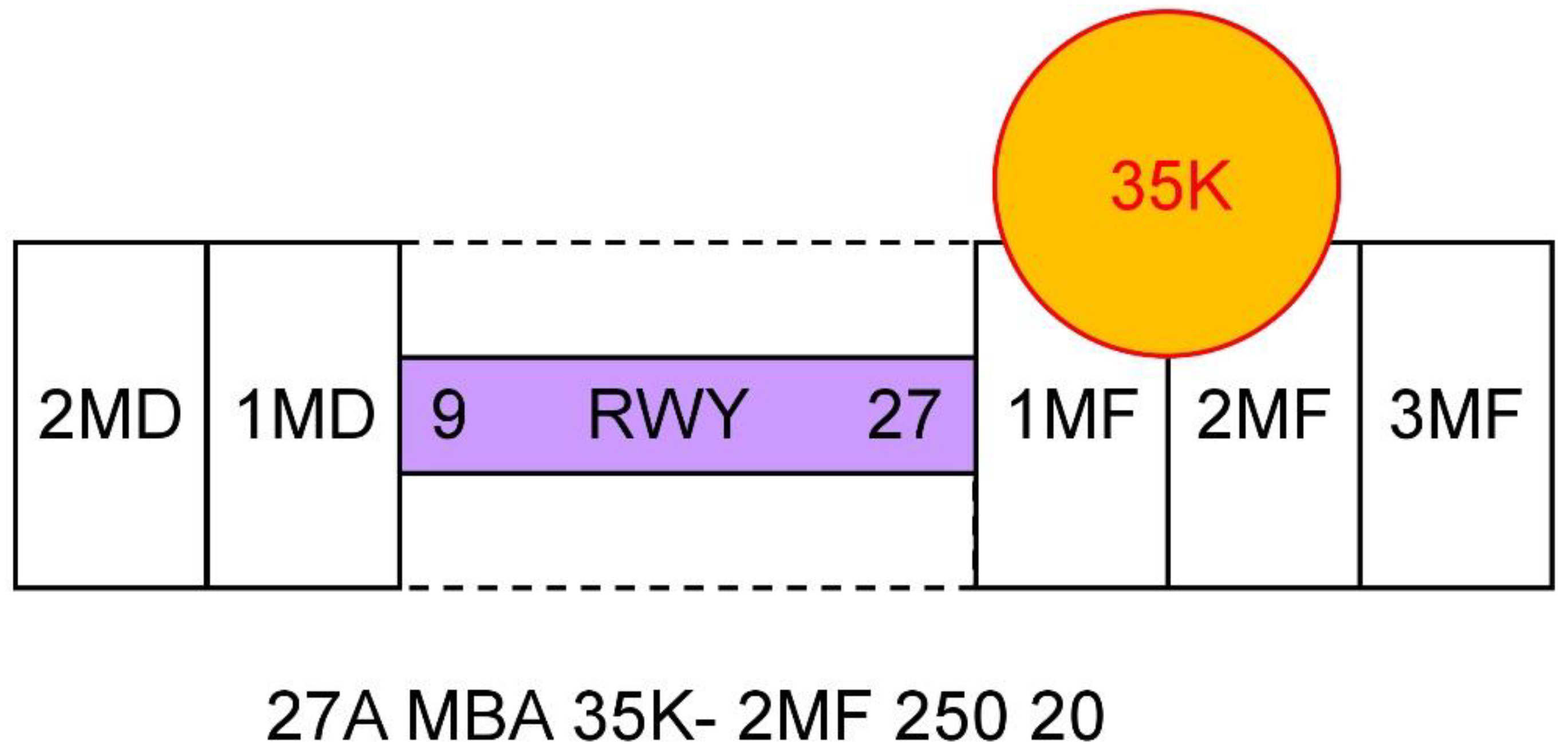
- location (identification of the runway, and whether the phenomena affects its approach or departure corridor),
- character (microburst, wind shear or gust front),
- magnitude (change in the wind speed, loss or gain), and
- the location of the first encounter of the aircraft with the phenomena (whether it can be expected along the runway or 1, 2 or 3 NM from the runway edge).
- (1)
- We did not focus exclusively on the existing runway directions and their respective corridors. We analyzed each lidar beam instead.
- (2)
- We did not constrain our analysis to a precision of 1 NM, i.e., to the length of the imaginary boxes at the arrival and departure corridors. Instead, we made use of the exact location of an appearance of the wind shear/microburst alerts.
- (1)
- Select a lidar beam and find the furthest gate with a measurement of radial wind speed. Denote this gate as A1, with radial wind speed vA1.
- (2)
- Find the closest gate to A1 with a measurement of radial wind speed along the selected lidar beam and towards the lidar. Denote this gate as B1, with radial wind speed vB1.
- (3)
- Let d be the distance between A1 and B1 and Δv = vB1 − vA1.
- (4)
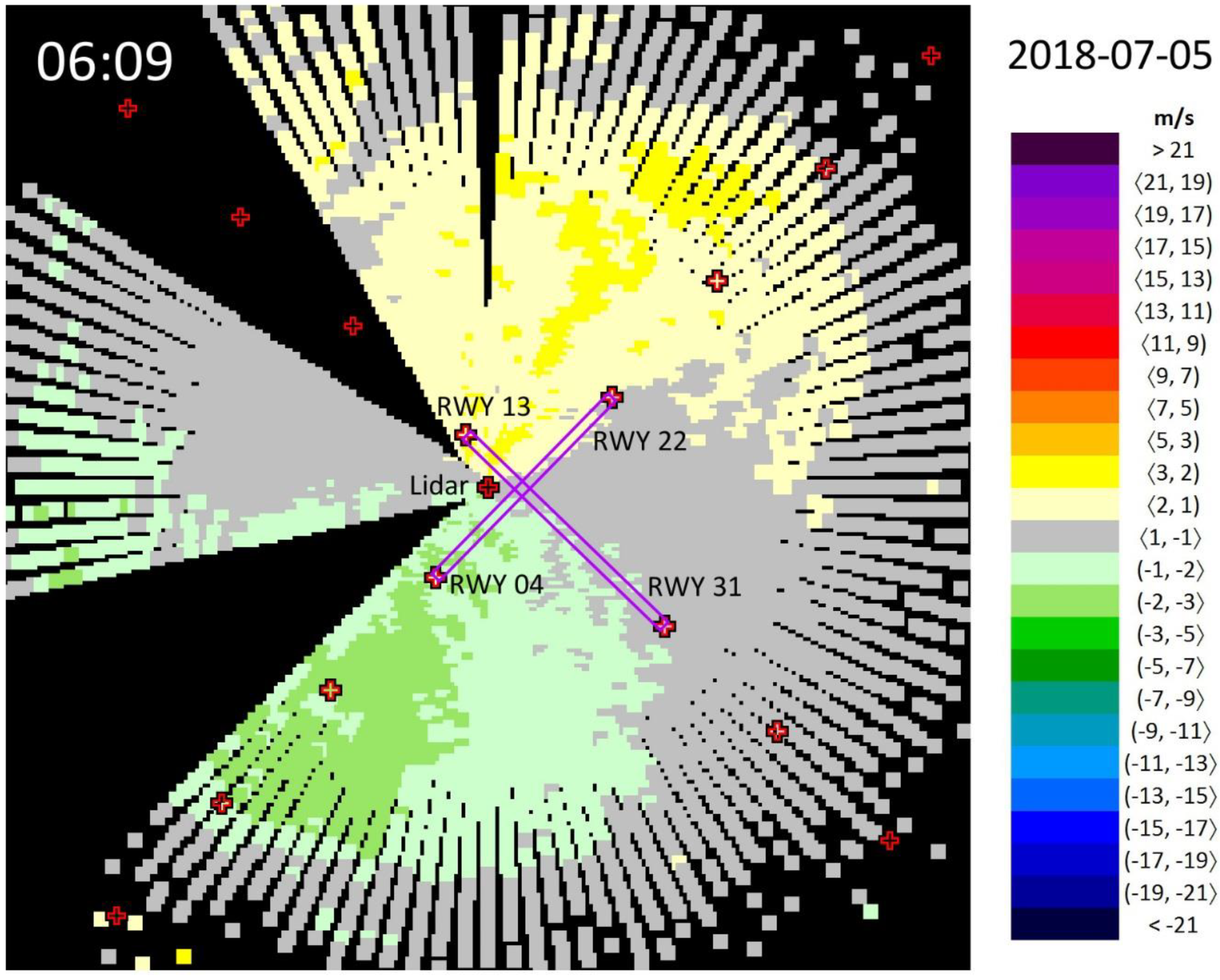
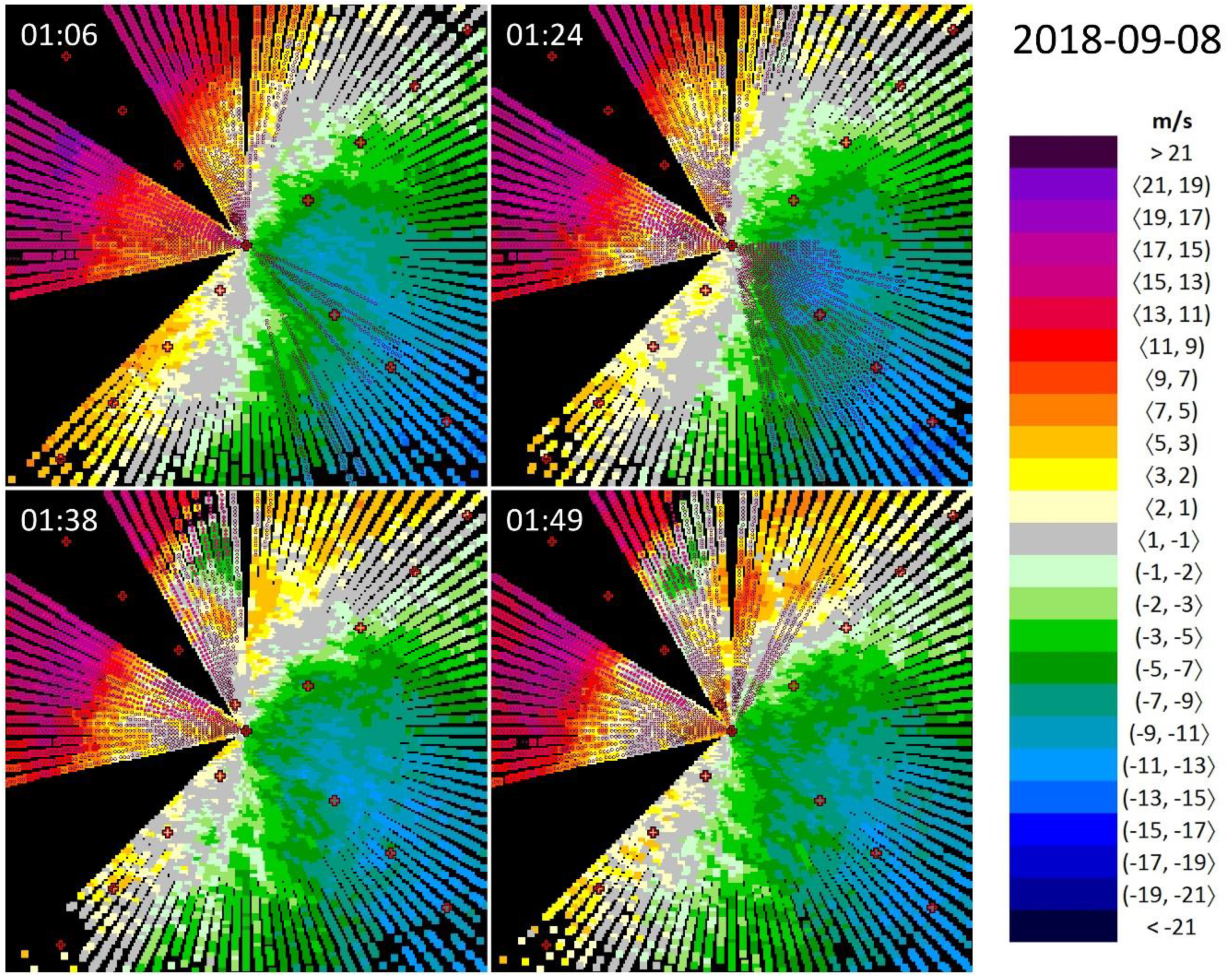
- If Δv ≥ 7.5 m/s (15 kt) and d ≤ 4 km, then issue wind shear alert for the segment A1B1 and mark it on the lidar snapshot by empty pink circles (see the compositions of lidar snapshots at the selected weather events in the upcoming Sections).
- (5)
- Select a different gate B (B2, B3, …, BN) by moving it one, two, …, N − 1 gates closer towards the lidar while keeping the gate A1 and the lidar beam unchanged.
- (6)
- Repeat steps 3 and 4 N − 1 times for different gates B while d ≤ 4 km. The final segment with wind shear alert for the gate A1 (denoted as A1BWS1) will consists of the aggregation of the segments with wind shear alerts corresponding to A1B1, A1B2, …, A1BN. Note that all segments marked in step 4) as those with wind shear alert remain also marked after the aggregation of the segments.
- (7)
- Repeat steps 1 to 6 for different gates A (A2, A3, …) along the selected lidar beam. The final segment with wind shear alert for the selected lidar beam will consists of the union of the segments with wind shear alerts corresponding to A1BWS1, A2BWS2, A3BWS3, …
- (4)
- If Δv ≥ 15.0 m/s (30 kt) and d ≤ 4 km, then issue microburst alert for the segment A1B1 and mark it on the lidar snapshot by full pink circles (see the lidar snapshots in the upcoming Sections).
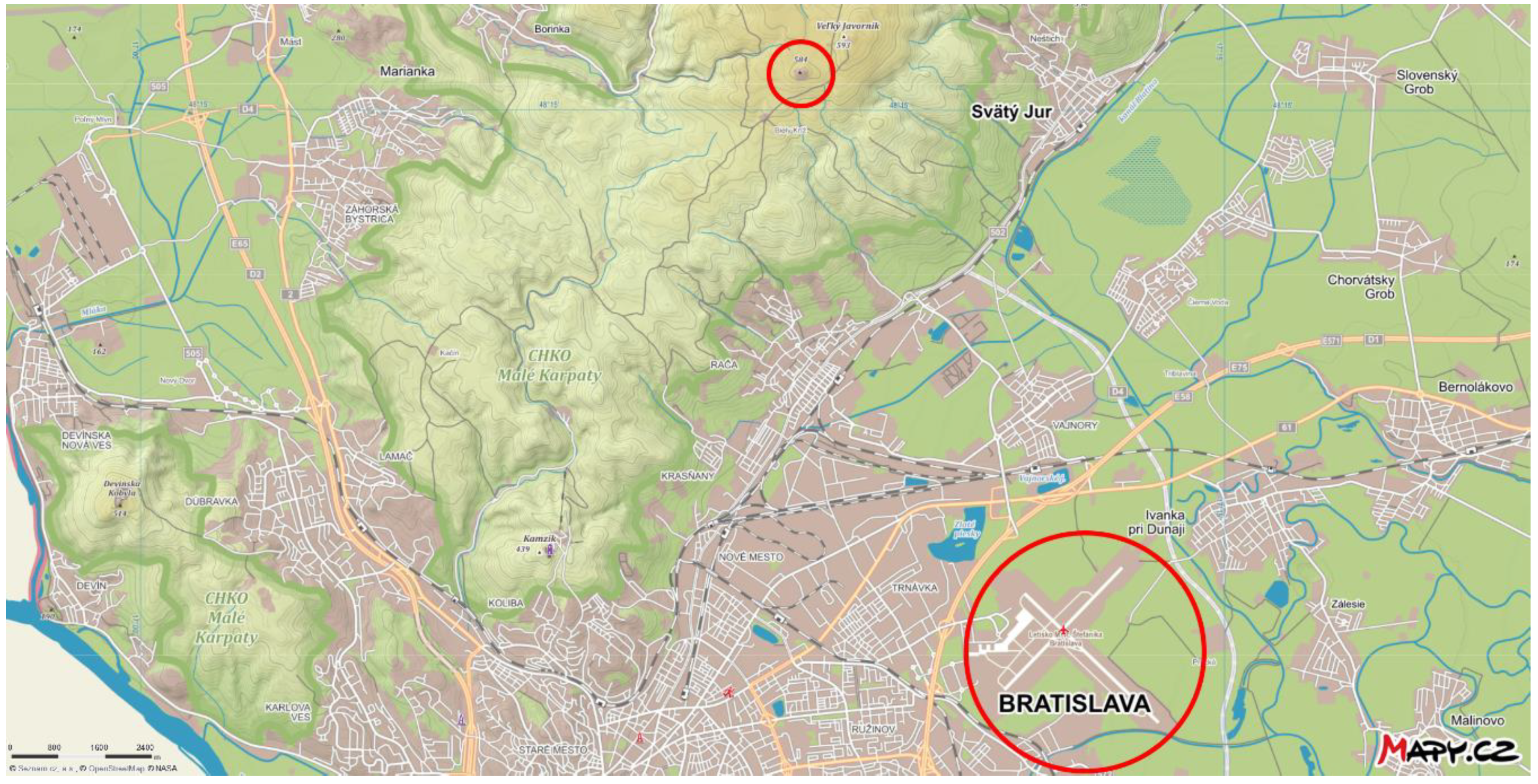
2.2. Geographical and Climatological Settings of the Area of Interest
2.3. Meteorological Instruments at/Near the Target Site
2.3.1. Lidar at the Bratislava Airport
2.3.2. Radar at Malý Javorník
3. Results
3.1. Multi-Instrumental Analysis of Selected Weather Events
3.1.1. Event #1—Wind Shear in a Temporally Stable Wind Field
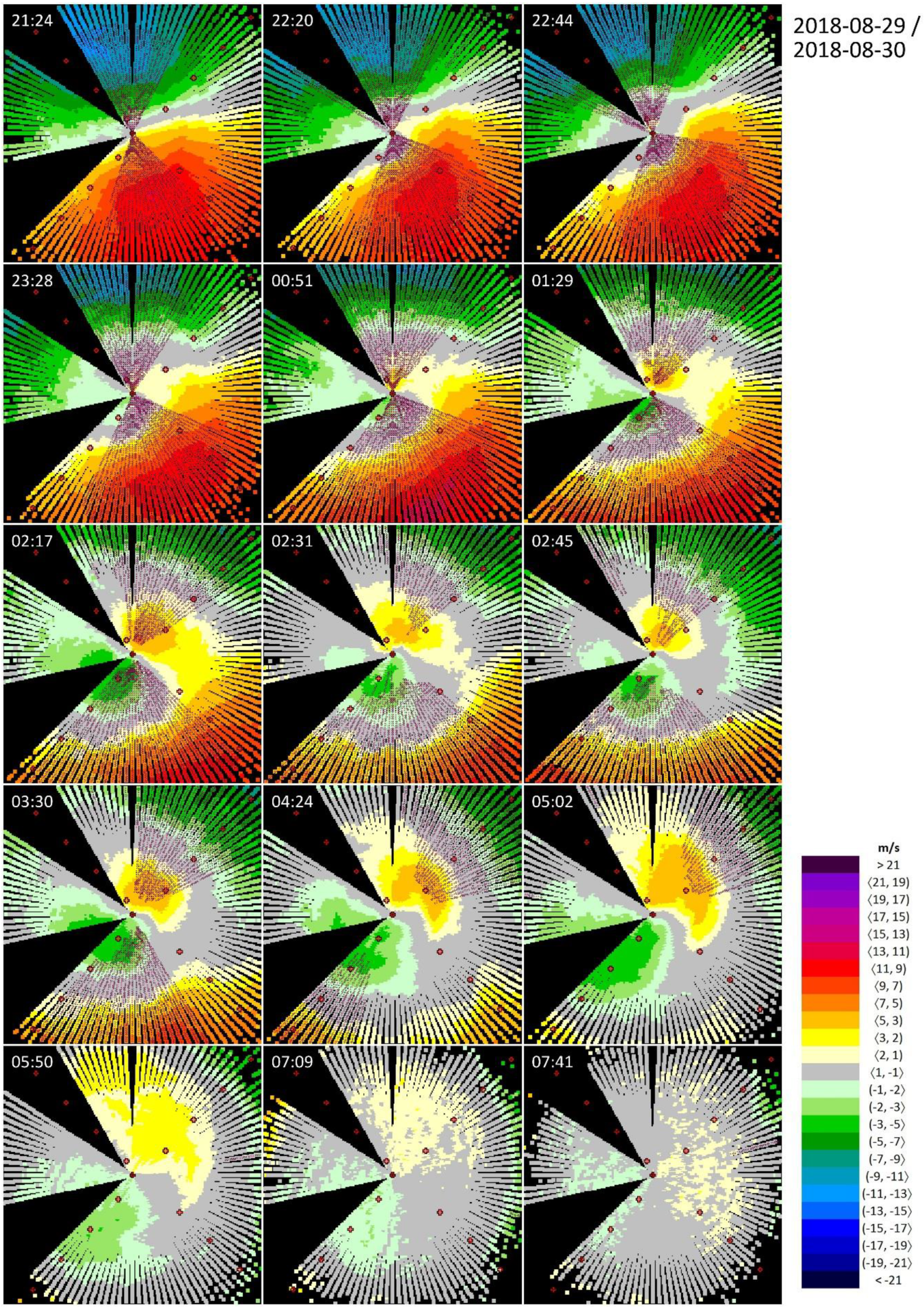
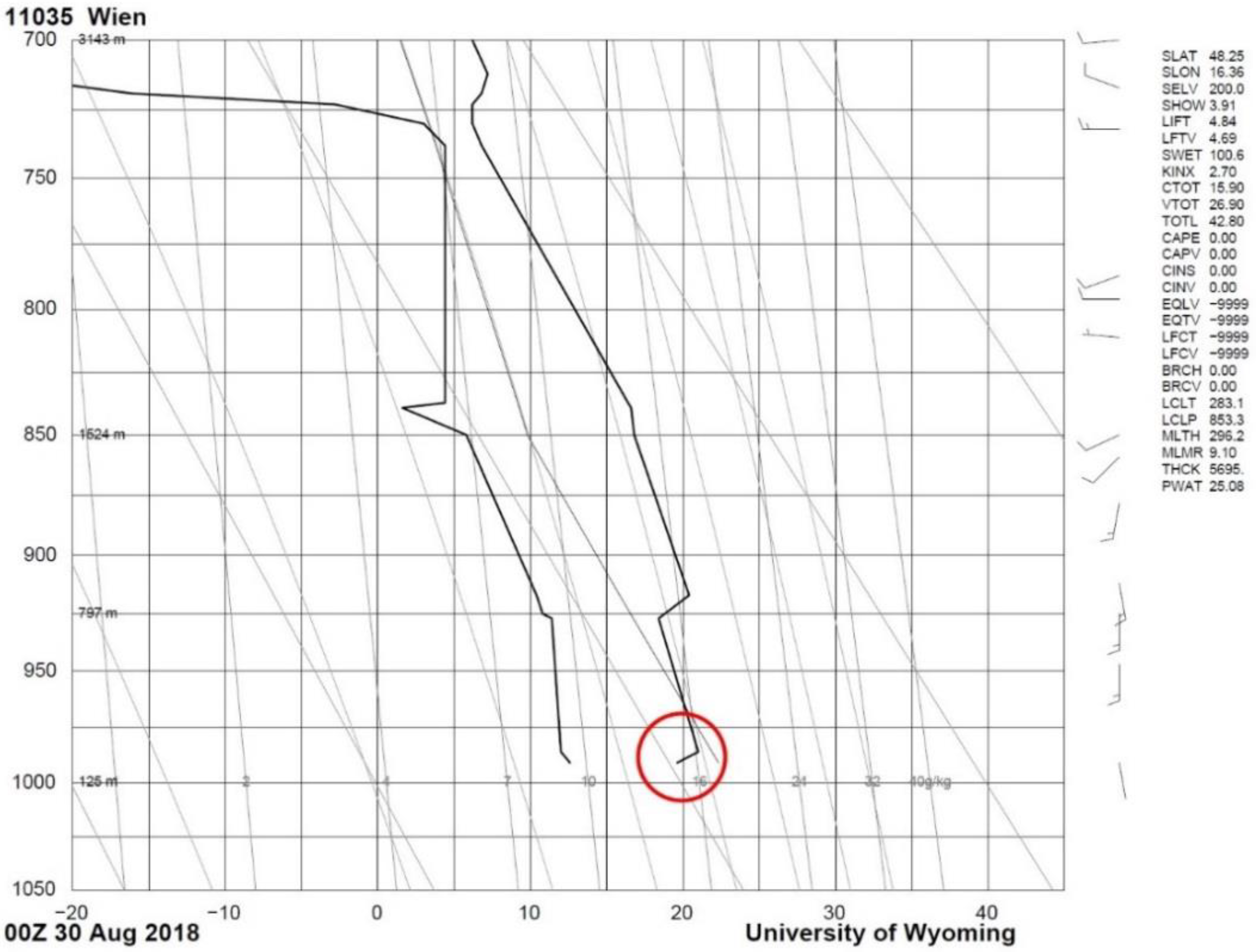
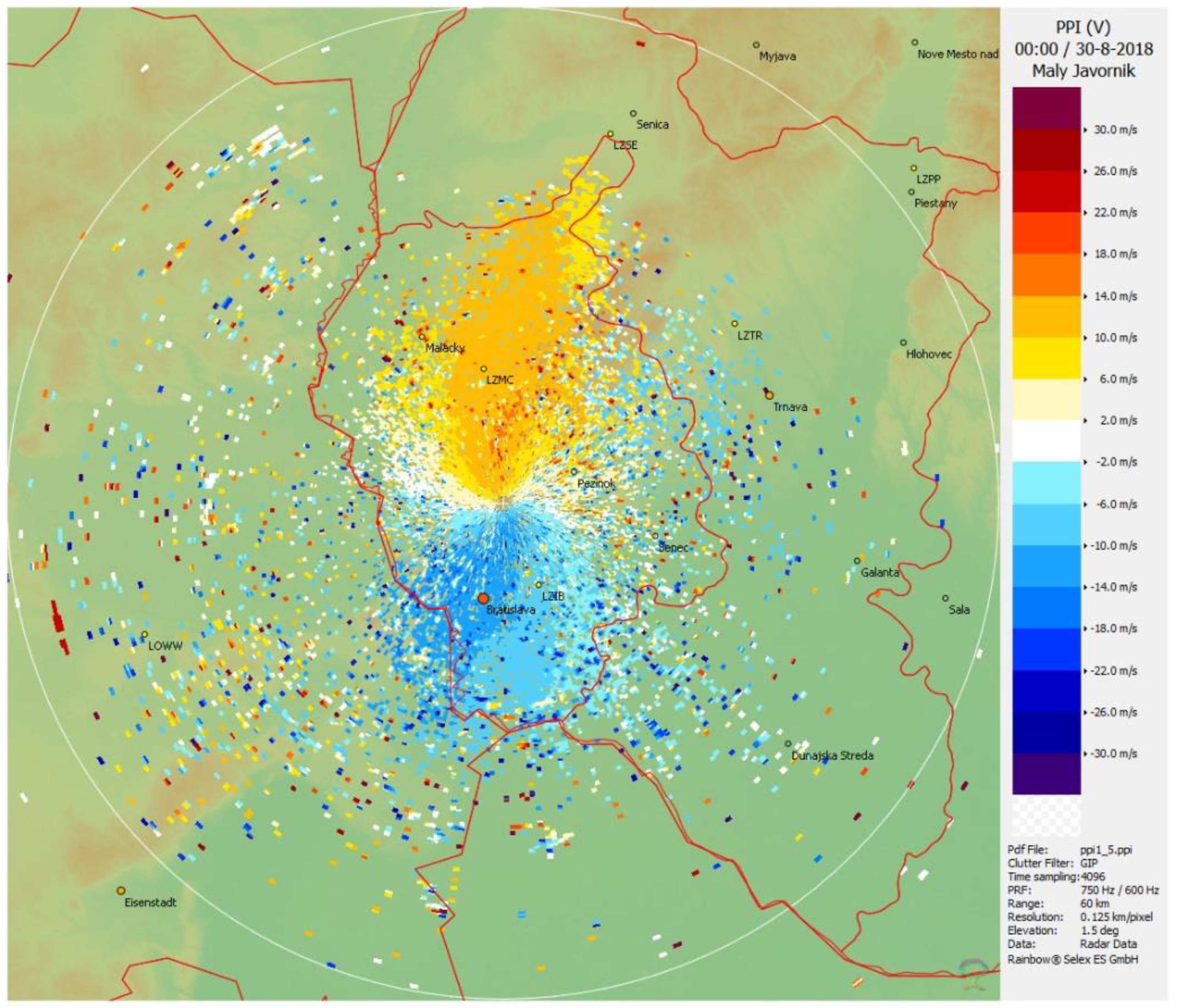
3.1.2. Event #2—Wind Shear Due to Thermodynamic Inversion
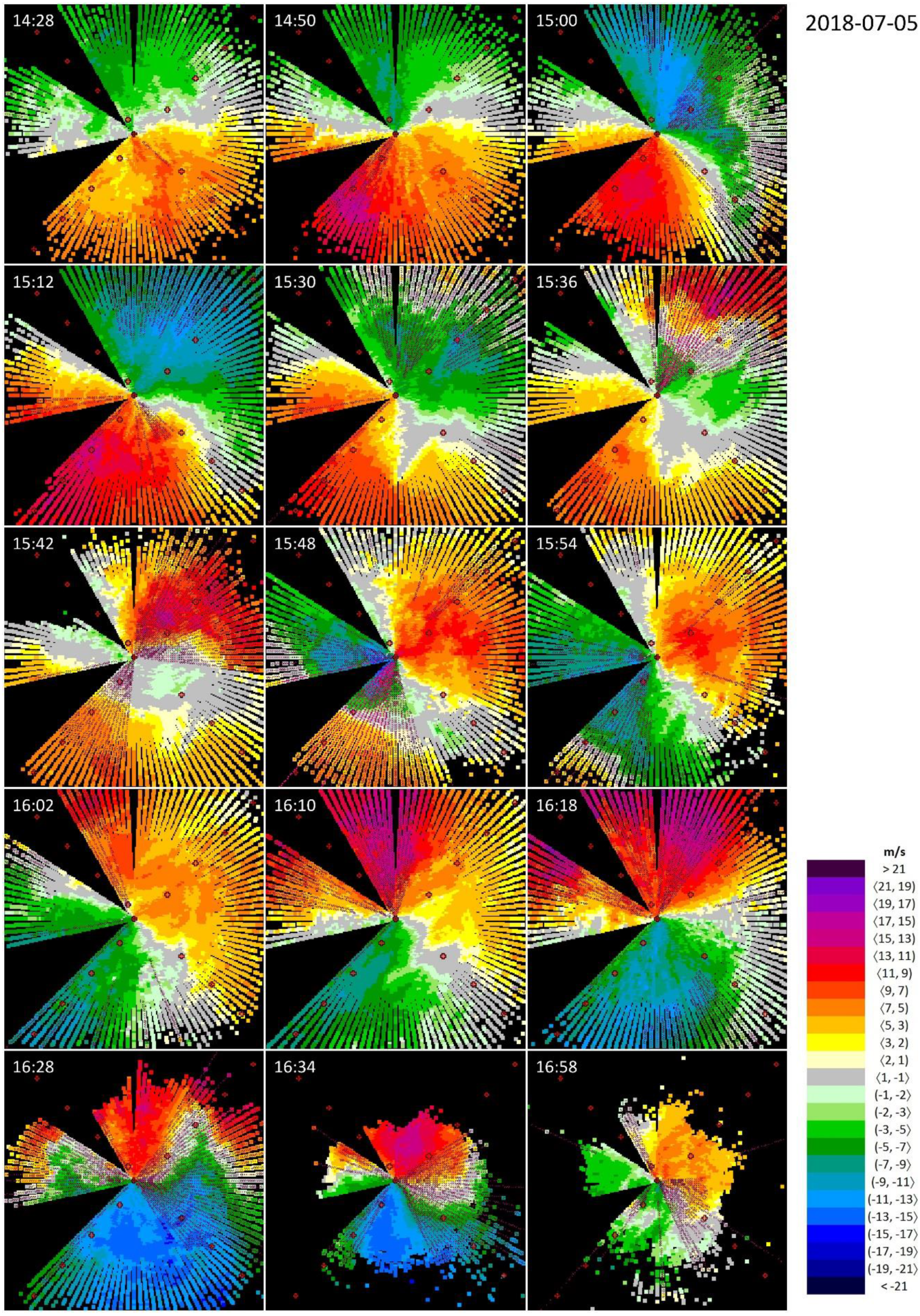
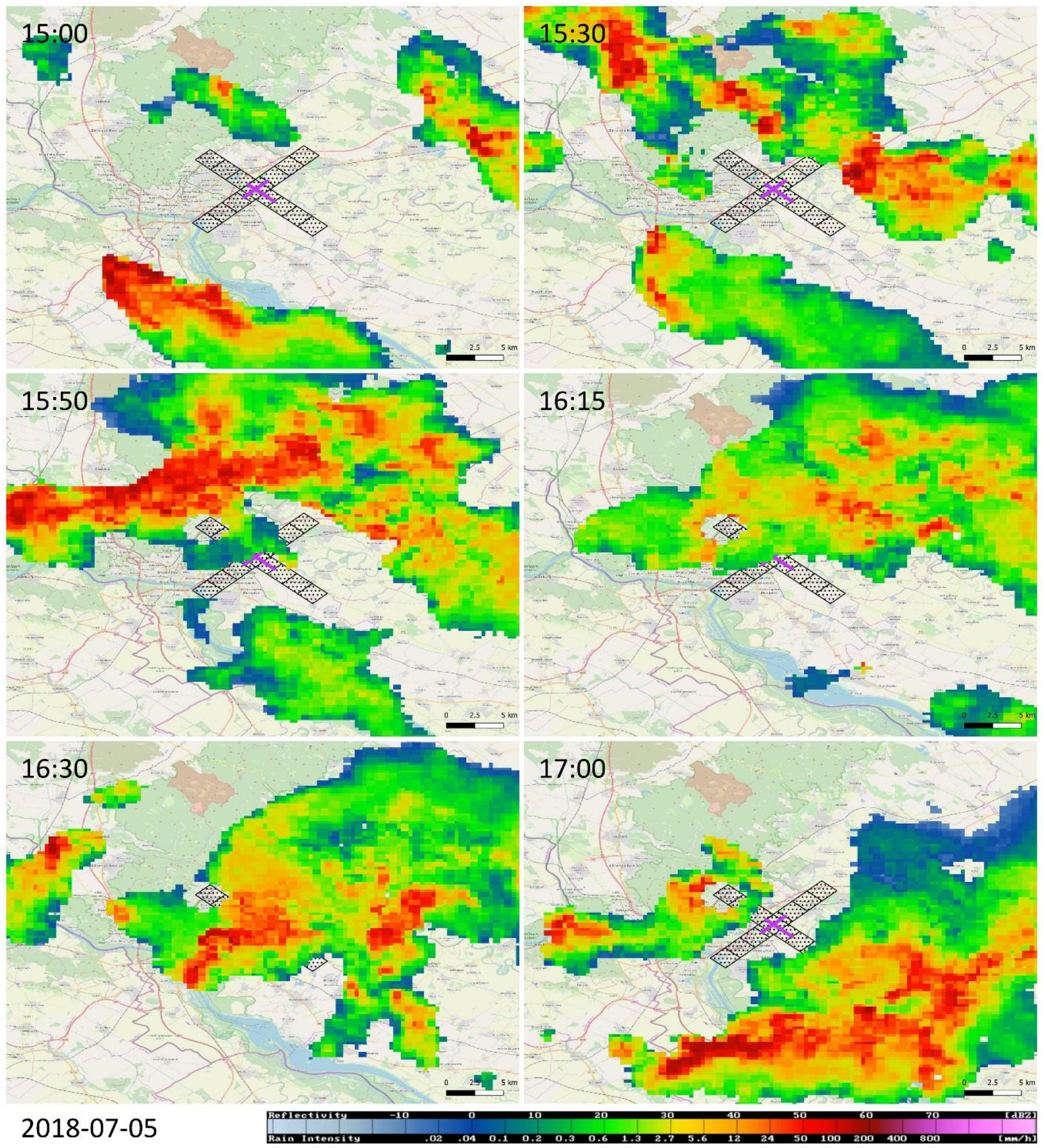
3.1.3. Event #3—Wind Shear at the Passage of a Cold Front
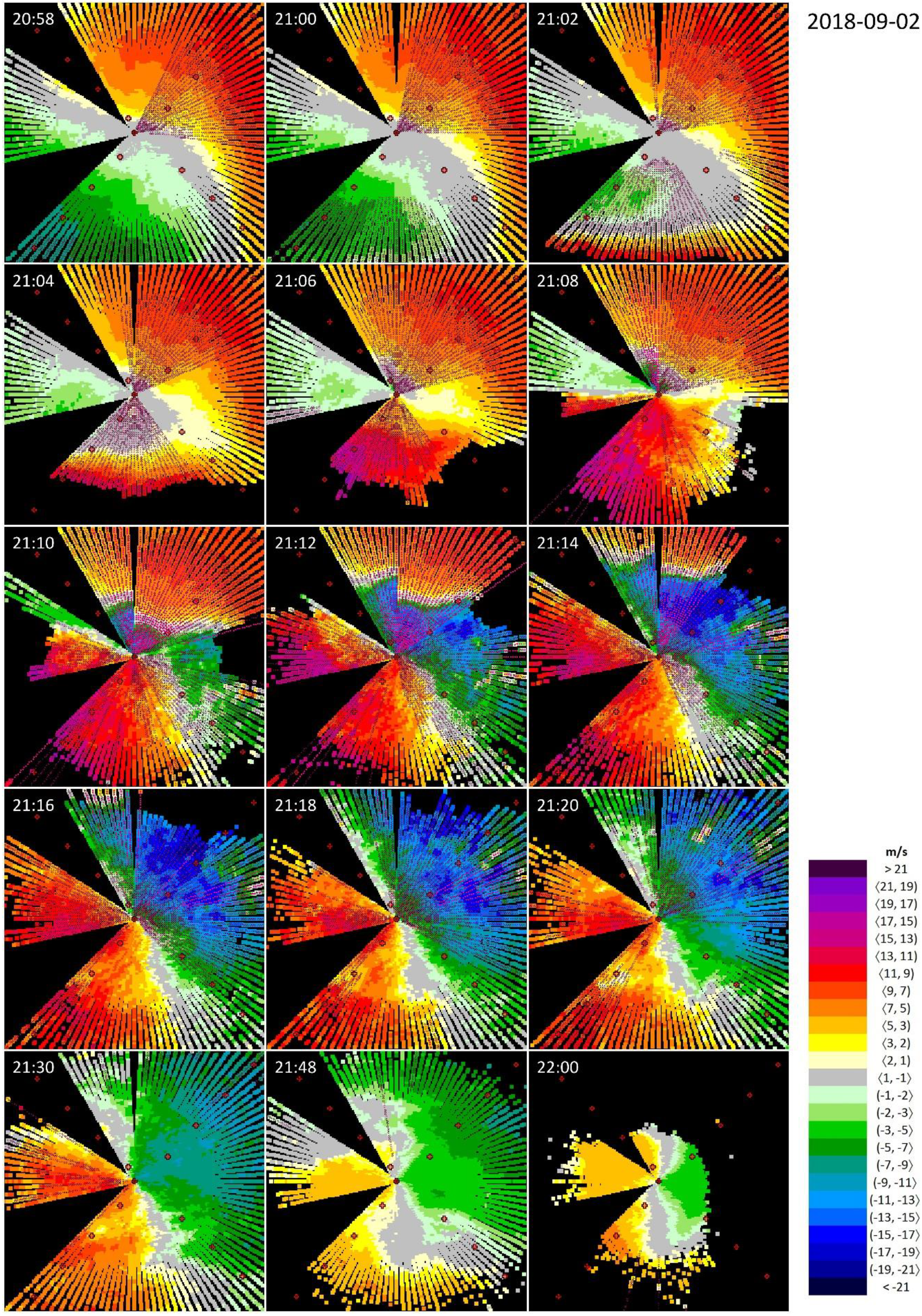
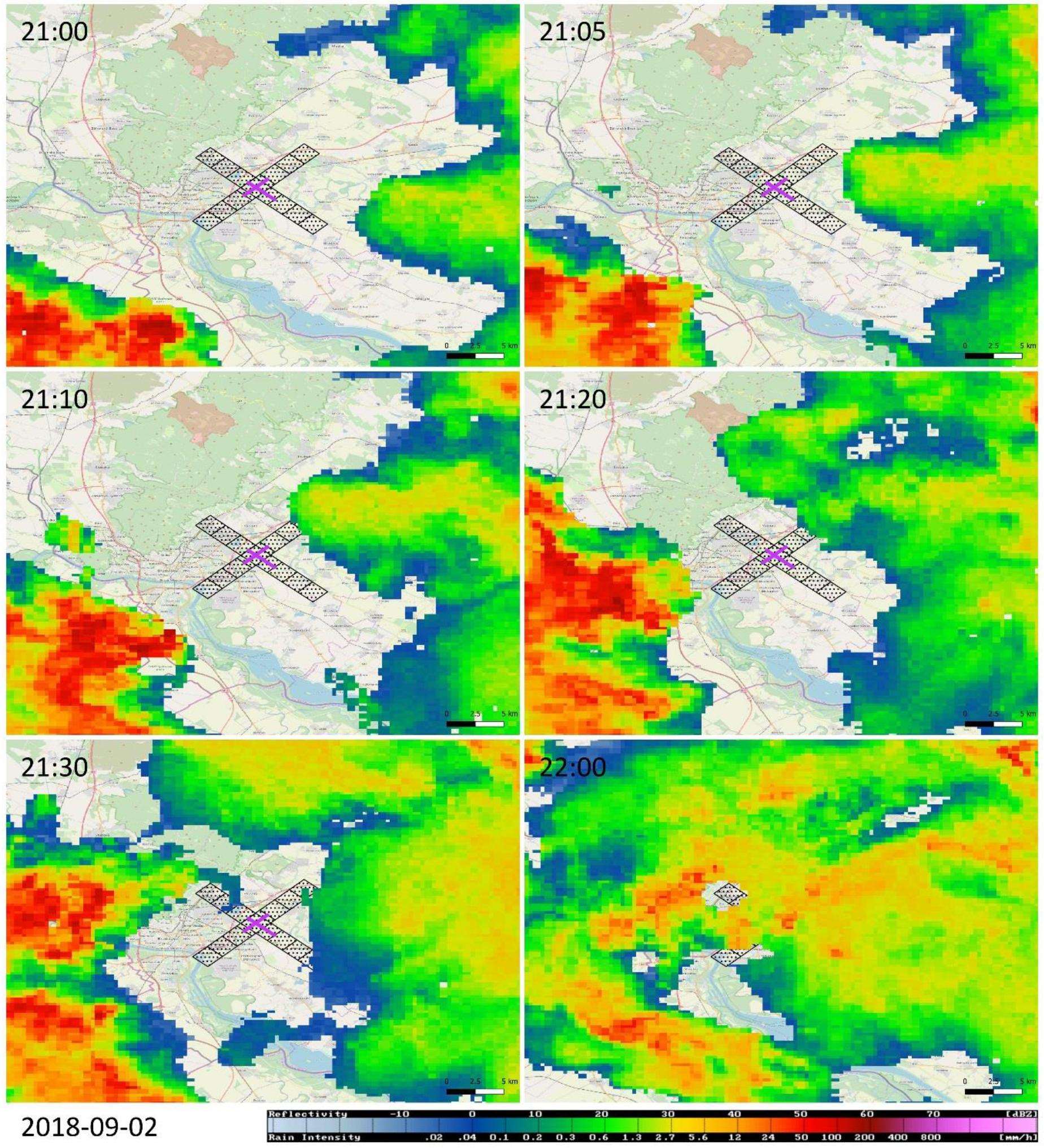
3.1.4. Event #4—Wind Shear at the Passage of a Gust Front
3.2. Monitoring the Aerosol Content
4. Discussion
4.1. Spatial Consistency
4.2. Wind Shear Alerts on the Runways
4.3. Rapidly Changing Conditions
4.4. Lidar in the Center
4.5. Seasonal Differences
4.6. Scanning Strategy
5. Conclusions
- Lidar is able to monitor the evolution of weather events at a high spatial and temporal resolution. This is a very useful finding both from the perspective of aviation and air pollution modelling, since no similar opportunities have been available to date in the broader area of Central Europe.
- In the climatic conditions of Bratislava, medium-type lidar (Leosphere WindCube 200S) can usually “see” up to 6−7 km approximately horizontally (more precisely, along the glide path under the elevation of 3°) and 1−2.5 km vertically in the RHI regime. This finding may be extended to areas with similar climate and aerosol contents, i.e., to regions lying on the boundary of the maritime and the continental climatic regimes.
- Lidar does not replace radar. Lidar beams are more attenuated by rainfall (see Events #3 and #4) than those of the radar, therefore, in showery rain, radar can “see” further than lidar. The Bratislava Airport, however, has a specific (unfortunate) feature: due to the orographic settings (where radar is elevated and lidar is installed on the plain), the radar cannot see the airport. On the other hand, radar observations provide useful information on the radial wind speed at the higher levels of the boundary layer but not for the final phases of an aircraft’s landing. Thus, the lidar and the radar in Bratislava complement each other not only from the perspective of whether they are more suited to monitor dry or wet weather events but also in the aspect of the topographical configuration of the target area.
- Analysis of low-level wind shear and issuing wind shear alerts (microburst alerts) that meet the ICAO requirements is possible on the basis of lidar observations.
- Automated wind shear alerts may suffer from false alarms generated by noise in the data. Therefore, quality check is inevitable, as was shown by a cross-check by means of the neighboring beams with alerts.
- From the perspective of aeronautical safety, it is important to stress that many of the dangerous weather situations are “invisible” (demonstrated by the example of Events #1 and #2)—the wind shears occur in clear and seemingly peaceful atmosphere at a high pressure. Without lidar capable of scanning such situations, the pilot standardly receives measurements of the surface wind only, which are directly opposite to the winds aloft, encountered shortly before landing and after take-off. Such cases are often reported by pilots using Bratislava Airport [personal communication].
- For civil protection, the protection of human lives and health and air pollution modelers, it is crucial information that any chemical substances or smoke from potential accidents or pollutant and aerosols from regular sources, will be trapped in the lower 700 m of the atmosphere and may potentially reach dangerous concentrations. Such measurement is hardly obtainable otherwise, as Bratislava does not operate upper air sounding station (which is the usual state of towns with their population over half a million).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Merritt, M.W.; Klingle-Wilson, D.; Campbell, S.D. Wind shear detection with pencil-beam radars. Linc. Lab. J. 1989, 2, 483–510. [Google Scholar]
- Federal Aviation Administration. Siting Guidelines for Low Level Windshear Alert System (LLWAS) Remote Facilites; Document ID: 6560.21A; Federal Aviation Administration: Washington, DC, USA, 1989. [Google Scholar]
- Chan, P.W.; Shun, C.M.; Wu, K.C. Operational LIDAR-based system for automatic windshear alerting at the Hong Kong International Airport. In Proceedings of the 12th Conference on Aviation, Range and Aerospace Meteorology, Atlanta, GA, USA, 29 January–2 February 2006; p. 5. [Google Scholar]
- Shun, C.M.; Chan, P.W. Applications of an infrared Doppler LIDAR in detection of wind shear. J. Atmos. Ocean. Technol. 2008, 25, 637–655. [Google Scholar] [CrossRef]
- Chan, P.W. Aviation applications of the pulsed Doppler LIDAR—Experience in Hong Kong. Open Atmos. Sci. J. 2009, 3, 138–146. [Google Scholar] [CrossRef]
- Chan, P.W.; Lee, Y.F. Application of short-range Lidar in wind shear alerting. J. Atmos. Ocean. Technol. 2012, 29, 207–220. [Google Scholar] [CrossRef]
- Weipert, A.; Kauczok, S.; Hannesen, R.; Ernsdorf, T.; Stiller, B. Wind shear detection using radar and lidar at Frankfurt and Munich airports. In Proceedings of the 8th European Conference on Radar in Meteorology and Hydrology, Garmisch-Partenkirchen, Germany, 1–5 September 2014; p. 16. [Google Scholar]
- Major Thai Airport to Install Doppler Lidar System. Available online: https://optics.org/news/3/3/7 (accessed on 15 October 2019).
- Hon, K.K.; Chan, P.W. Application of LIDAR-derived eddy dissipation rate profiles in low-level wind shear and turbulence alerts at Hong Kong International Airport. Meteorol. Appl. 2014, 21, 74–85. [Google Scholar] [CrossRef]
- Hallock, J.N.; Holzäpfel, F. A review of recent wake vortex research for increasing airport capacity. Prog. Aerosp. Sci. 2017, 98, 27–36. [Google Scholar] [CrossRef]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of lidar-based applications for aviation weather. Pure Appl. Geophys. 2019, 176, 1959–1976. [Google Scholar] [CrossRef]
- Aviation Safety Network, Aircraft Accident Boeing 727-225 N8845E New York-John F. Kennedy International Airport, NY (JFK). Available online: https://aviation-safety.net/database/record.php?id=19750624-1 (accessed on 12 September 2019).
- Aviation Safety Network, Aircraft Accident Lockheed L-1011 TriStar 1 N726DA Dallas/Fort Worth International Airport, TX (DFW). Available online: https://aviation-safety.net/database/record.php?id=19850802-0 (accessed on 12 September 2019).
- Aviation Safety Network, Aircraft Accident Boeing 737-8GP (WL) PK-LKS Denpasar-Ngurah Rai Bali International Airport (DPS). Available online: https://aviation-safety.net/database/record.php?id=20130413-0 (accessed on 12 September 2019).
- Fujita, T.T. The Downburst, Microburst and Macroburst; SMRP Research Paper; University of Chicago: Chicago, IL, USA, 1985; Volume 210. [Google Scholar]
- Fujita, T.T. DFW Microburst on August 2, 1985; SMRP Research Paper; University of Chicago: Chicago, IL, USA, 1986; Volume 217. [Google Scholar]
- Federal Aviation Administration. Wind Shear; FAA-P-8740-40, AFS-8; Federal Aviation Administration: Washington, DC, USA, 2008. Available online: http://www.faasafety.gov/files/gslac/library/documents/2011/Aug/56407/FAA%20P-8740-40%20WindShear[hi-res]%20branded.pdf (accessed on 23 September 2019).
- International Civil Aviation Organization. Manual on Low Level Wind Shear and Turbulence, 1st ed.; ICAO Doc: Montreal, QC, Canada, 2005; p. 9817. [Google Scholar]
- Federal Aviation Administration. Aeronautical Information Manual. Official Guide to Basic Flight Information and ATC Procedures. Effective: August 15, 2019. Available online: https://www.faa.gov/air_traffic/publications/media/aim_basic_8-15-19.pdf (accessed on 6 October 2019).
- International Civil Aviation Organization. Agenda Item 6: Wind shear, turbulence and tsunami warnings. In Proceedings of the 4th Meeting of the Meteorological Warning Study Group, Montreal, QC, Canada, 15–18 May 2012. [Google Scholar]
- Bochníček, O.; Hrušková, K. Climate Atlas of Slovakia; Slovak Hydrometeorological Institute: Bratislava, Slovakia, 2015. [Google Scholar]
- Polčák, N.; Šťastný, P. The Effect of Relief on Wind Conditions in Slovakia; Matej Bel University: Banská Bystrica, Slovakia; Slovak Hydrometeorological Institute: Bratislava, Slovakia, 2010. (In Slovak) [Google Scholar]
- Polčák, N.; Šťastný, P. Topography Influence on Wind Conditions of Bratislava. In Microclimate and Mesoclimate of Landscape Structures and Anthropogenic Environment; Středová, H., Rožnovský, J., Litschmann, T., Eds.; Czech Bioclimatological Society: Brno, Czech Republic, 2011. (In Slovak) [Google Scholar]
- BTS Handled Last Year the Biggest Number of Passengers in History. Available online: https://www.bts.aero/en/airport/press/latest-news/bts-handled-last-year-the-biggest-number-of-passengers-in-history (accessed on 12 September 2019).
- About Airport. Available online: https://www.bts.aero/en/airport/about-us/company-profile/about-airport (accessed on 12 September 2019).
- Förchtgott, J. Evidence for mountain-sized lee eddies. Weather 1969, 24, 255–260. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance | 0 NM | 0 NM | 1 NM | 1 NM | 2 NM | 2 NM | 3 NM | 3 NM |
|---|---|---|---|---|---|---|---|---|
| RWY | d [m] | H [m] | d [m] | H [m] | d [m] | H [m] | d [m] | H [m] |
| 22 | 1770 | 93 | 3570 | 187 | 5370 | 281 | 7170 | 376 |
| 31 | 2590 | 136 | 4390 | 230 | 6190 | 324 | (7990) | (419) |
| 04 | 1200 | 63 | 3000 | 157 | 4800 | 252 | 6600 | 346 |
| 13 | 670 | 35 | 2470 | 129 | 4270 | 224 | 6070 | 318 |
| Runway | Category | Event #1 | Event #2 | Event #3 | Event #4 |
|---|---|---|---|---|---|
| Start date | 2018-09-08 | 2018-08-29 | 2018-07-05 | 2018-09-02 | |
| # of scans | 22 | 308 | 76 | 32 | |
| 22 | WSA | 0 | 118 | 28 | 14 |
| MBA | 0 | 0 | 5 | 3 | |
| 31 | WSA | 14 | 139 | 10 | 5 |
| MBA | 0 | 0 | 0 | 0 | |
| 04 | WSA | 0 | 130 | 24 | 15 |
| MBA | 0 | 0 | 2 | 1 | |
| 13 * | WSA | 6 | 112 | 18 | 5 |
| MBA | 16 | 0 | 0 | 2 |
| Group | Category | Event #1 | Event #2 | Event #3 | Event #4 |
|---|---|---|---|---|---|
| Start date | 2018-09-08 | 2018-08-29 | 2018-07-05 | 2018-09-02 | |
| # of azimuths | 2244 | 31416 | 7752 | 3264 | |
| # of WSC/MBC conditions | 933 (41.6%) | 11513 (36.6%) | 1976 (25.5%) | 1106 (33.8%) | |
| Single | WSC | 13 (1.4%) | 286 (2.5%) | 244 (12.3%) | 68 (6.1%) |
| MBC | 17 (1.8%) | 28 (0.2%) | 28 (1.4%) | 15 (1.4%) | |
| Double | WSC | 4 (0.4%) | 122 (1.1%) | 118 (6.0%) | 50 (4.5%) |
| MBC | 16 (1.7%) | 0 (0%) | 12 (0.6%) | 10 (0.9%) | |
| 3+ | WSC | 680 (72.9%) | 11077 (96.2%) | 1500 (75.9%) | 856 (77.4%) |
| MBC | 203 (21.8%) | 0 (0%) | 74 (3.7%) | 107 (9.7%) |
| Category | Event #1 | Event #2 | Event #3 | Event #4 |
|---|---|---|---|---|
| Max. Δv [m/s] | 19.0 | 13.7 | 22.0 | 27.0 |
| Date | 2018-09-08 | 2018-08-30 | 2018-07-05 | 2018-09-02 |
| Time | 1:38 | 0:53 | 15:36 | 21:14 |
| Azimuth [°] | 351 | 162 | 33 | 36 |
| Distance A [m] | 4300 | 1100 | 1500 | 2100 |
| Distance B [m] | 8200 | 5100 | 5300 | 6100 |
| Δd [m] | 3900 | 4000 | 3800 | 4000 |
| Condition | MBC | WSC | MBC | MBC |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nechaj, P.; Gaál, L.; Bartok, J.; Vorobyeva, O.; Gera, M.; Kelemen, M.; Polishchuk, V. Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health. Int. J. Environ. Res. Public Health 2019, 16, 4584. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16224584
Nechaj P, Gaál L, Bartok J, Vorobyeva O, Gera M, Kelemen M, Polishchuk V. Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health. International Journal of Environmental Research and Public Health. 2019; 16(22):4584. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16224584
Chicago/Turabian StyleNechaj, Pavol, Ladislav Gaál, Juraj Bartok, Olga Vorobyeva, Martin Gera, Miroslav Kelemen, and Volodymyr Polishchuk. 2019. "Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health" International Journal of Environmental Research and Public Health 16, no. 22: 4584. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16224584