
A Novel Guided Zygomatic and Pterygoid Implant Surgery System: A Human Cadaver Study on Accuracy

 , , , , ,
, , , , ,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
- Cadavers were treated with respect at all times
- A professional attitude was applied during all lab procedures
- Human cadaver material was not removed from the laboratory under any circumstances.
- No photographs or video cameras were used in the laboratory
- Only health professionals enrolled in the course and instructors entered the lab
- All cadaver material remained at the assigned dissection table
- Incomplete dissections or intentional destruction of dissected structures was considered unprofessional behavior and work area was kept as clean as possible.
2.1. Presurgical Procedure
2.1.1. EZgoma Principle
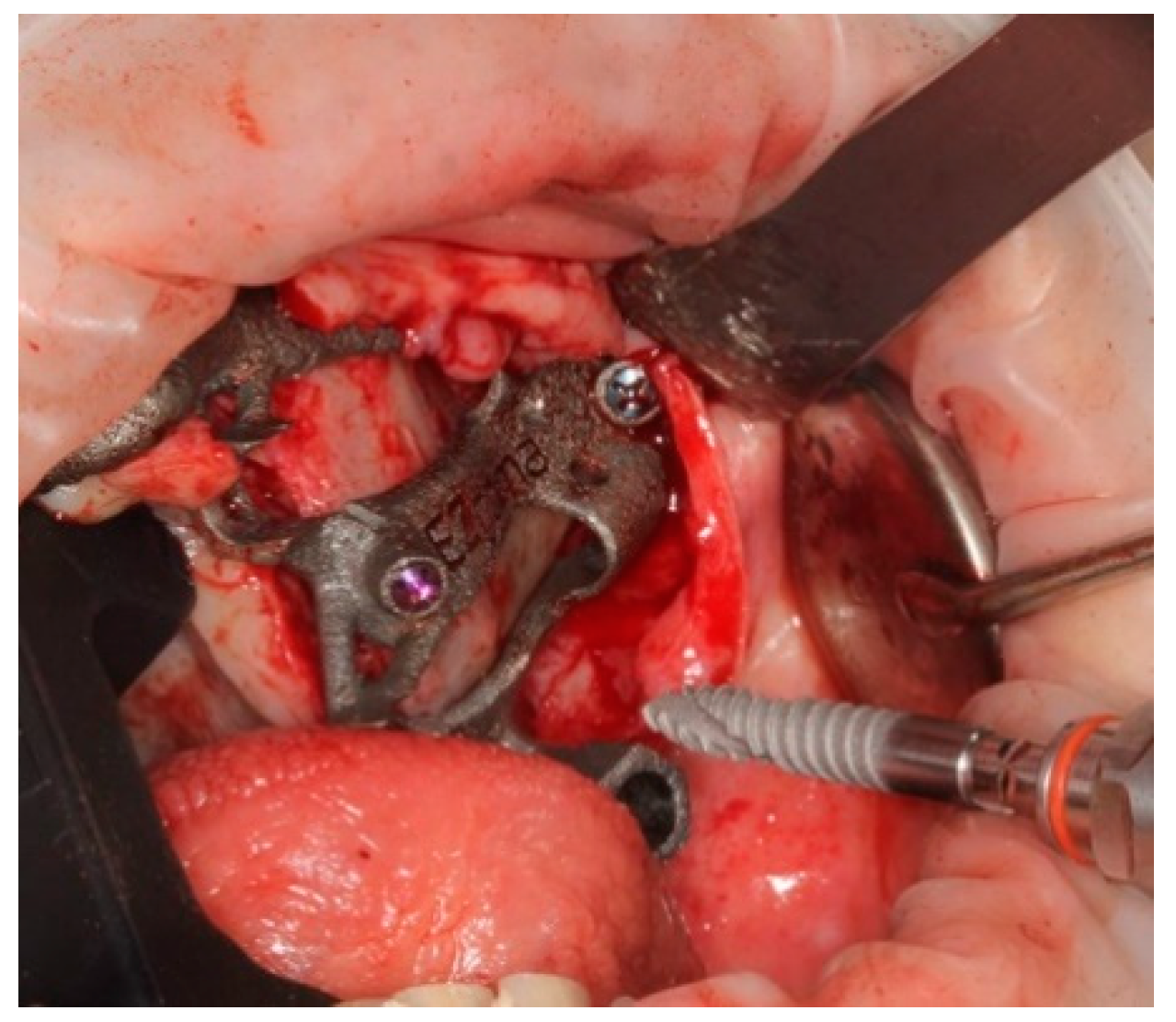
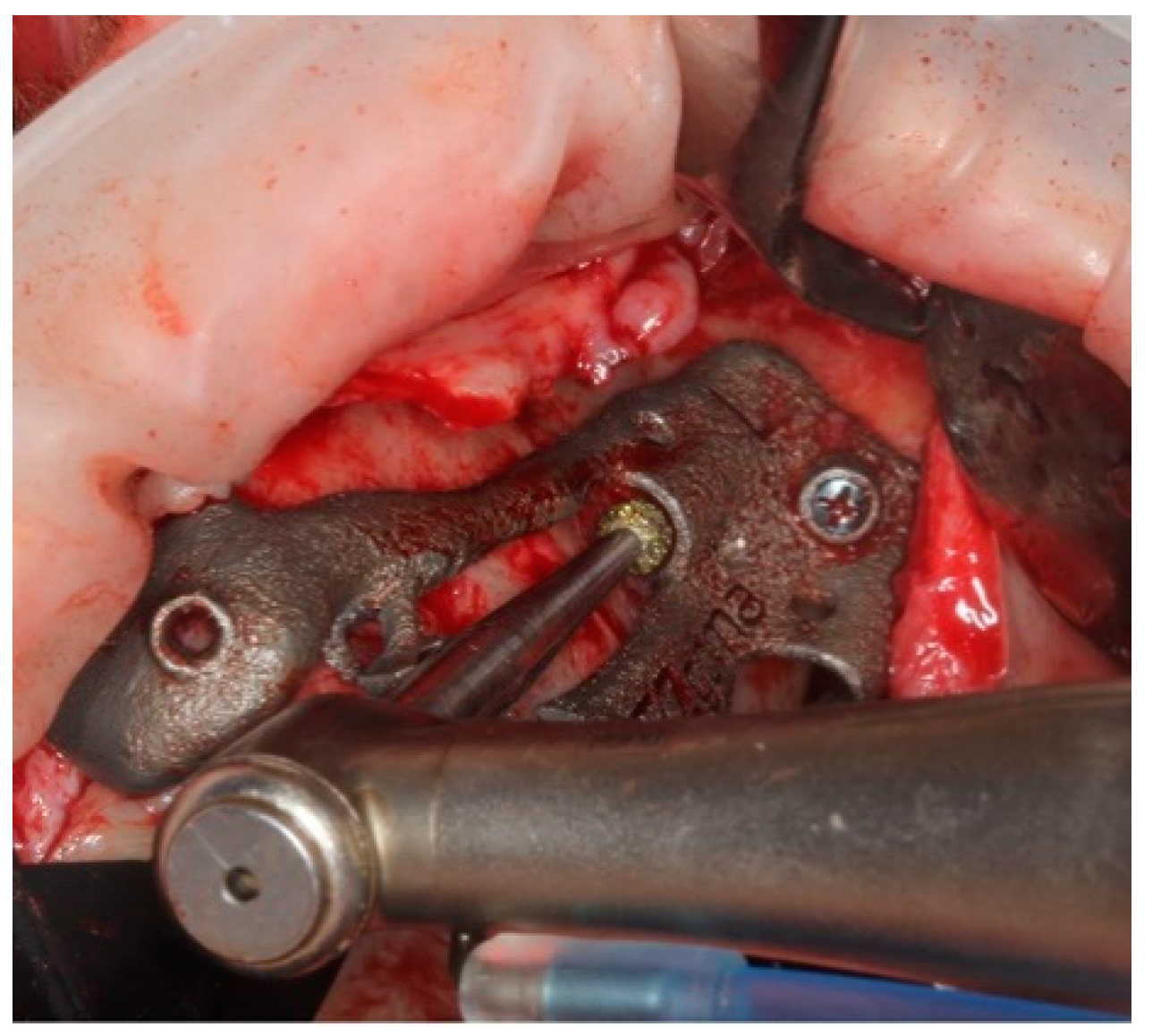
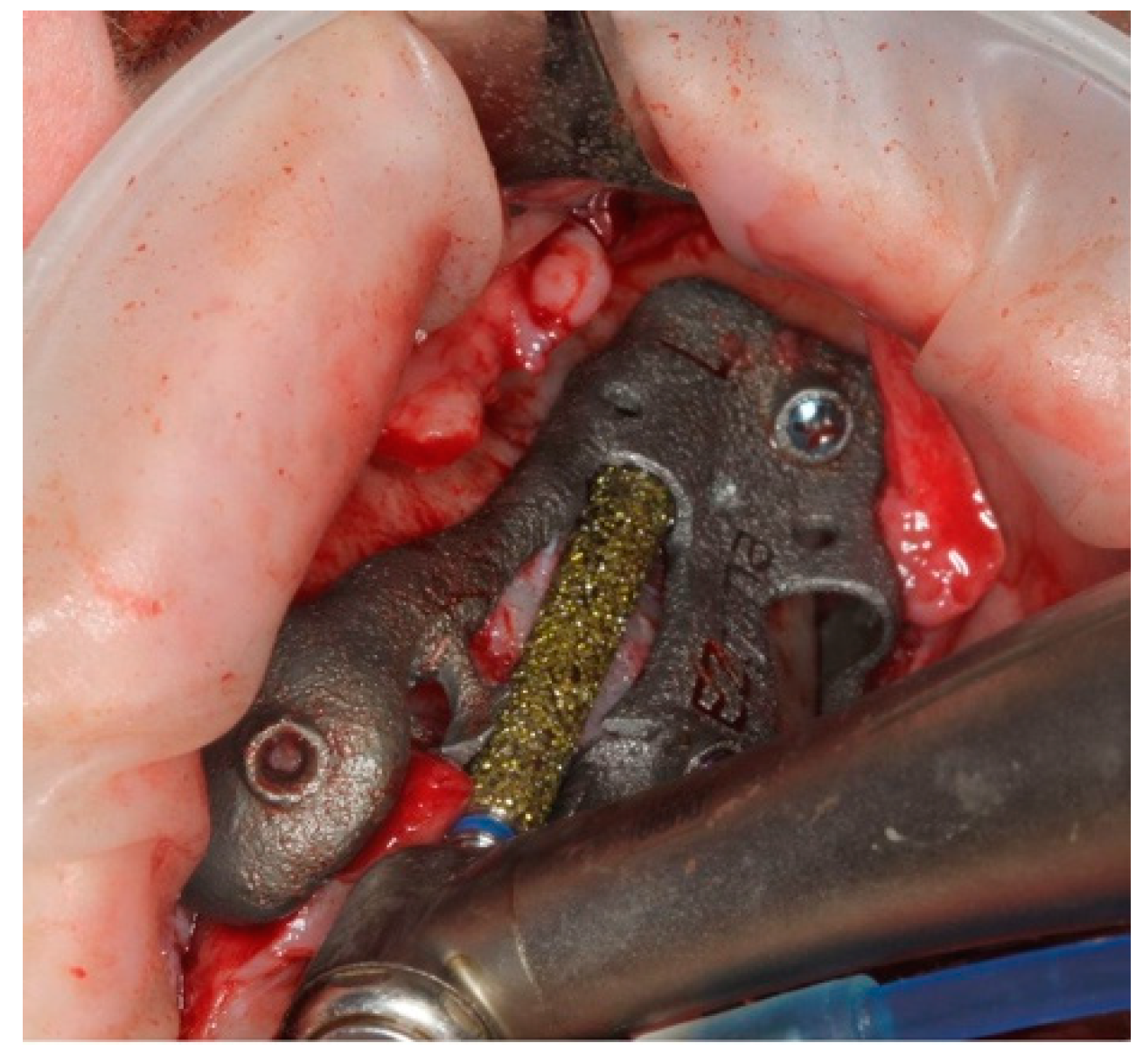
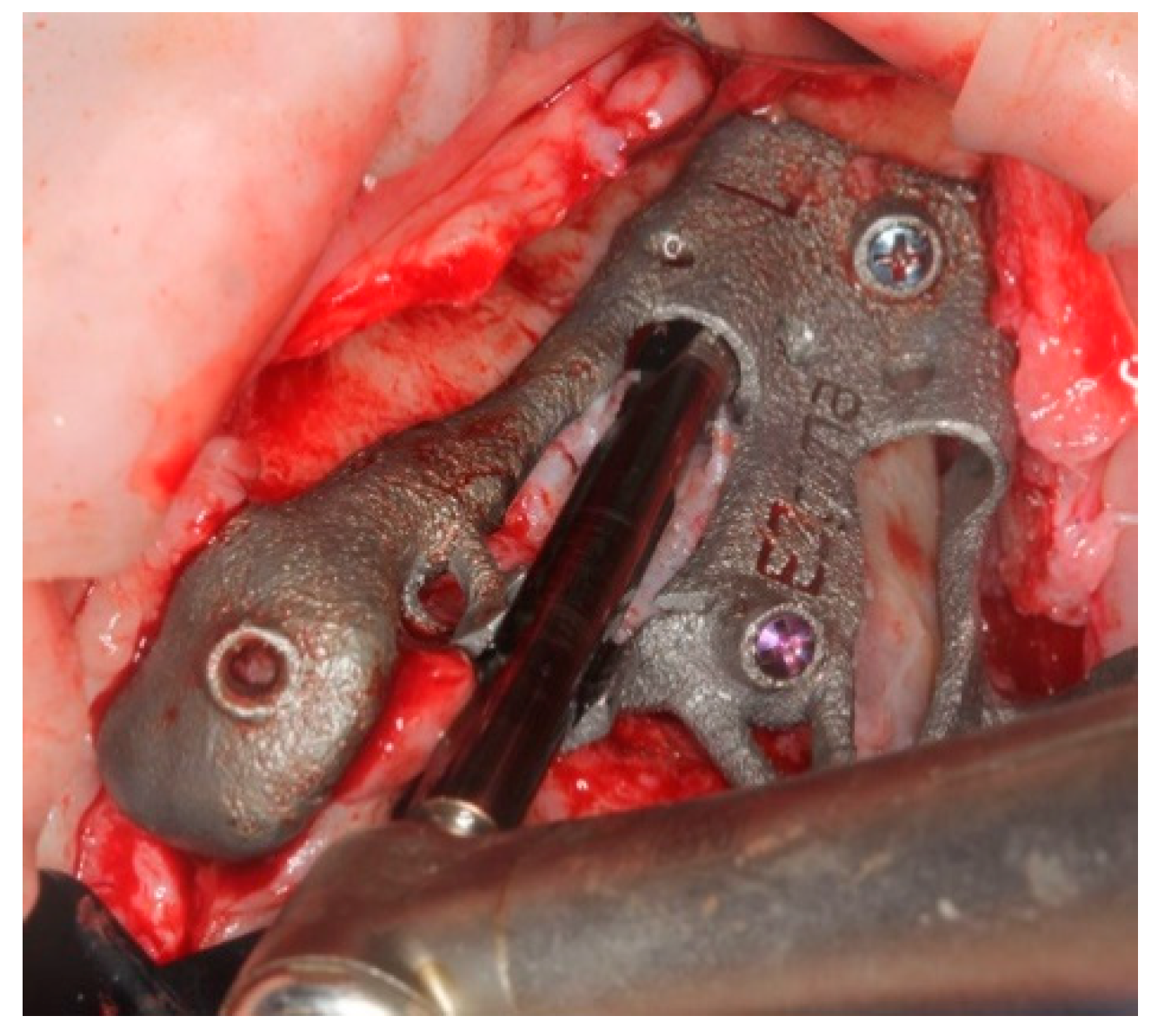
2.1.2. EZgoma Procedure
2.1.3. Pterygoid Implant Protocol
2.1.4. Zygomatic Protocol
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hartmann, R.; de Menezes Bandeira, A.C.F.; de Araújo, S.C.; McKenna, G.; Brägger, U.; Schimmel, M.; Leles, C.R. Cost-effectiveness of three different concepts for the rehabilitation of edentulous mandibles: Overdentures with 1 or 2 implant attachments and hybrid prosthesis on four implants. J. Oral Rehabil. 2020, 47, 1394–1402. [Google Scholar] [CrossRef]
- Probst, L.F.; Vanni, T.; de Cavalcante, D.F.B.; da Silva, E.T.; Cavalcanti, Y.W.; Passeri, L.A.; Pereira, A.C. Cost-effectiveness of implant-supported dental prosthesis compared to conventional dental prosthesis. Rev. Saude Publica 2019, 53, s1518-8787. [Google Scholar] [CrossRef] [Green Version]
- Nogueira, T.E.; Esfandiari, S.; Leles, C.R. Cost-effectiveness analysis of the single-implant mandibular overdenture versus conventional complete denture: Study protocol for a randomized controlled trial. Trials 2016, 17, 533. [Google Scholar] [CrossRef] [Green Version]
- Barone, A.; Toti, P.; Marconcini, S.; Derchi, G.; Saverio, M.; Covani, U. Esthetic Outcome of Implants Placed in Fresh Extraction Sockets by Clinicians with or without Experience: A Medium-Term Retrospective Evaluation. Int. J. Oral Maxillofac. Implants 2016, 31, 1397–1406. [Google Scholar] [CrossRef] [PubMed]
- Jorba-García, A.; Figueiredo, R.; González-Barnadas, A.; Camps-Font, O.; Valmaseda-Castellón, E. Accuracy and the role of experience in dynamic computer guided dental implant surgery: An in-vitro study. Med. Oral Patol. Oral Cir. Bucal 2019, 24, e76–e83. [Google Scholar] [CrossRef]
- Stefanelli, L.V.; DeGroot, B.S.; Lipton, D.I.; Mandelaris, G.A. Accuracy of a Dynamic Dental Implant Navigation System in a Private Practice. Int. J. Oral Maxillofac. Implants 2019, 34, 205–213. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.-M.; Lee, H.-E.; Lan, T.-H. The influence of dental experience on a dental implant navigation system. BMC Oral Health 2019, 19, 222. [Google Scholar] [CrossRef] [Green Version]
- Rozov, R.A.; Trezubov, V.N.; Urakov, A.L.; Azarin, G.S.; Reshetnikov, A.P.; Kopylov, M.V. Criterion assessment system of the actual level of expertise of dental professionals practicing implant dentistry. Stomatologiia 2019, 98, 4–11. [Google Scholar] [CrossRef]
- Golob Deeb, J.; Bencharit, S.; Carrico, C.K.; Lukic, M.; Hawkins, D.; Rener-Sitar, K.; Deeb, G.R. Exploring training dental implant placement using computer-guided implant navigation system for predoctoral students: A pilot study. Eur. J. Dent. Educ. 2019, 23, 415–423. [Google Scholar] [CrossRef] [PubMed]
- Chrcanovic, B.R.; Kisch, J.; Albrektsson, T.; Wennerberg, A. Impact of Different Surgeons on Dental Implant Failure. Int. J. Prosthodont. 2017, 30, 445–454. [Google Scholar] [CrossRef] [Green Version]
- Ravitch, M.M.; Steichen, F.M. A stapling instrument for end-to-end inverting anastomoses in the gastrointestinal tract. Ann. Surg. 1979, 189, 791–797. [Google Scholar] [CrossRef] [PubMed]
- Watzinger, F.; Birkfellner, W.; Wanschitz, F.; Ziya, F.; Wagner, A.; Kremser, J.; Kainberger, F.; Huber, K.; Bergmann, H.; Ewers, R. Placement of endosteal implants in the zygoma after maxillectomy: A Cadaver study using surgical navigation. Plast. Reconstr. Surg. 2001, 107, 659–667. [Google Scholar] [CrossRef] [Green Version]
- Schiroli, G.; Angiero, F.; Silvestrini-Biavati, A.; Benedicenti, S. Zygomatic implant placement with flapless computer-guided surgery: A proposed clinical protocol. J. Oral Maxillofac. Surg. 2011, 69, 2979–2989. [Google Scholar] [CrossRef]
- Pellegrino, G.; Bellini, P.; Cavallini, P.F.; Ferri, A.; Zacchino, A.; Taraschi, V.; Marchetti, C.; Consolo, U. Dynamic Navigation in Dental Implantology: The Influence of Surgical Experience on Implant Placement Accuracy and Operating Time. An in Vitro Study. Int. J. Environ. Res. Public Health 2020, 17, 2153. [Google Scholar] [CrossRef] [Green Version]
- Mediavilla Guzmán, A.; Riad Deglow, E.; Zubizarreta-Macho, Á.; Agustín-Panadero, R.; Hernández Montero, S. Accuracy of Computer-Aided Dynamic Navigation Compared to Computer-Aided Static Navigation for Dental Implant Placement: An In Vitro Study. J. Clin. Med. 2019, 8, 2123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stefanelli, L.V.; Graziani, U.; Pranno, N.; Di Carlo, S.; Mandelaris, G.A. Accuracy of Dynamic Navigation Surgery in the Placement of Pterygoid Implants. Int. J. Periodontics Restor. Dent. 2020, 40, 825–834. [Google Scholar] [CrossRef]
- Qin, C.; Cao, Z.; Fan, S.; Wu, Y.; Sun, Y.; Politis, C.; Wang, C.; Chen, X. An oral and maxillofacial navigation system for implant placement with automatic identification of fiducial points. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 281–289. [Google Scholar] [CrossRef]
- Qin, C.; Ran, X.; Wu, Y.; Chen, X. The development of non-contact user interface of a surgical navigation system based on multi-LSTM and a phantom experiment for zygomatic implant placement. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 2147–2154. [Google Scholar] [CrossRef]
- Stefanelli, L.V.; Mandelaris, G.A.; DeGroot, B.S.; Gambarini, G.; De Angelis, F.; Di Carlo, S. Accuracy of a Novel Trace-Registration Method for Dynamic Navigation Surgery. Int. J. Periodontics Restor. Dent. 2020, 40, 427–435. [Google Scholar] [CrossRef] [PubMed]
- Kaewsiri, D.; Panmekiate, S.; Subbalekha, K.; Mattheos, N.; Pimkhaokham, A. The accuracy of static vs. dynamic computer-assisted implant surgery in single tooth space: A randomized controlled trial. Clin. Oral Implant Res. 2019, 30, 505–514. [Google Scholar] [CrossRef]
- Widmann, G.; Bale, R.J. Accuracy in computer-aided implant surgery—A review. Int. J. Oral Maxillofac. Implants 2006, 21, 305–313. [Google Scholar]
- Lal, K.; White, G.S.; Morea, D.N.; Wright, R.F. Use of stereolithographic templates for surgical and prosthodontic implant planning and placement. Part II. A clinical report. J. Prosthodont 2006, 15, 117–122. [Google Scholar] [CrossRef]
- Vercruyssen, M.; Fortin, T.; Widmann, G.; Jacobs, R.; Quirynen, M. Different techniques of static/dynamic guided implant surgery: Modalities and indications. Periodontology 2000 2014, 66, 214–227. [Google Scholar] [CrossRef] [PubMed]
- D’haese, J.; Ackhurst, J.; Wismeijer, D.; De Bruyn, H.; Tahmaseb, A. Current state of the art of computer-guided implant surgery. Periodontology 2000 2017, 73, 121–133. [Google Scholar] [CrossRef] [PubMed]
- Somogyi-Ganss, E.; Holmes, H.I.; Jokstad, A. Accuracy of a novel prototype dynamic computer-assisted surgery system. Clin. Oral Implants Res. 2015, 26, 882–890. [Google Scholar] [CrossRef]
- Miller, R.J.; Bier, J. Surgical navigation in oral implantology. Implant. Dent. 2006, 15, 41–47. [Google Scholar] [CrossRef]
- Block, M.S.; Emery, R.W. Static or Dynamic Navigation for Implant Placement-Choosing the Method of Guidance. J. Oral Maxillofac. Surg. 2016, 74, 269–277. [Google Scholar] [CrossRef] [PubMed]
- Bornstein, M.M.; Scarfe, W.C.; Vaughn, V.M.; Jacobs, R. Cone beam computed tomography in implant dentistry: A systematic review focusing on guidelines, indications, and radiation dose risks. Int. J. Oral Maxillofac. Implants 2014, 29, 55–77. [Google Scholar] [CrossRef]
- Jung, R.E.; Schneider, D.; Ganeles, J.; Wismeijer, D.; Zwahlen, M.; Hämmerle, C.H.F.; Tahmaseb, A. Computer technology applications in surgical implant dentistry: A systematic review. Int. J. Oral Maxillofac. Implants 2009, 24, 92–109. [Google Scholar]
- Gaggl, A.; Schultes, G.; Kärcher, H. Navigational precision of drilling tools preventing damage to the mandibular canal. J. Cranio Maxillofac. Surg. 2001, 29, 271–275. [Google Scholar] [CrossRef] [PubMed]
- Colombo, M.; Mangano, C.; Mijiritsky, E.; Krebs, M.; Hauschild, U.; Fortin, T. Clinical applications and effectiveness of guided implant surgery: A critical review based on randomized controlled trials. BMC Oral Health 2017, 17, 150. [Google Scholar] [CrossRef]
- Bover-Ramos, F.; Viña-Almunia, J.; Cervera-Ballester, J.; Peñarrocha-Diago, M.; García-Mira, B. Accuracy of Implant Placement with Computer-Guided Surgery: A Systematic Review and Meta-Analysis Comparing Cadaver, Clinical, and In Vitro Studies. Int. J. Oral Maxillofac. Implants 2018, 33, 101–115. [Google Scholar] [CrossRef]
- Block, M.S.; Emery, R.W.; Cullum, D.R.; Sheikh, A. Implant Placement Is More Accurate Using Dynamic Navigation. J. Oral Maxillofac. Surg. 2017, 75, 1377–1386. [Google Scholar] [CrossRef] [PubMed]
- Cassetta, M.; Bellardini, M. How much does experience in guided implant surgery play a role in accuracy? A randomized controlled pilot study. Int. J. Oral Maxillofac. Surg. 2017, 46, 922–930. [Google Scholar] [CrossRef]
- Park, S.-J.; Leesungbok, R.; Cui, T.; Lee, S.W.; Ahn, S.-J. Reliability of a CAD/CAM Surgical Guide for Implant Placement: An In Vitro Comparison of Surgeons’ Experience Levels and Implant Sites. Int. J. Prosthodont 2017, 30, 367–369. [Google Scholar] [CrossRef] [Green Version]
- Scherer, U.; Stoetzer, M.; Ruecker, M.; Gellrich, N.-C.; von See, C. Template-guided vs. non-guided drilling in site preparation of dental implants. Clin. Oral Investig. 2015, 19, 1339–1346. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.I.; Cho, S.-H.; Ivey, A.; Reddy, L.V.; Sinada, N. Combined bone- and mucosa-supported 3D-printed guide for sinus slot preparation and prosthetically driven zygomatic implant placement. J. Prosthet Dent. 2021. [Google Scholar] [CrossRef]
- Stella, J.P.; Warner, M.R. Sinus slot technique for simplification and improved orientation of zygomaticus dental implants: A technical note. Int. J. Oral Maxillofac. Implants 2000, 15, 889–893. [Google Scholar]
- Van Steenberghe, D.; Malevez, C.; Van Cleynenbreugel, J.; Bou Serhal, C.; Dhoore, E.; Schutyser, F.; Suetens, P.; Jacobs, R. Accuracy of drilling guides for transfer from three-dimensional CT-based planning to placement of zygoma implants in human cadavers. Clin. Oral Implants Res. 2003, 14, 131–136. [Google Scholar] [CrossRef] [Green Version]
- Chrcanovic, B.R.; Oliveira, D.R.; Custódio, A.L. Accuracy evaluation of computed tomography-derived stereolithographic surgical guides in zygomatic implant placement in human cadavers. J. Oral Implantol. 2010, 36, 345–355. [Google Scholar] [CrossRef] [PubMed]
- Cao, Z.; Qin, C.; Fan, S.; Yu, D.; Wu, Y.; Qin, J.; Chen, X. Pilot study of a surgical robot system for zygomatic implant placement. Med. Eng. Phys. 2020, 75, 72–78. [Google Scholar] [CrossRef]
- Schneider, D.; Marquardt, P.; Zwahlen, M.; Jung, R.E. A systematic review on the accuracy and the clinical outcome of computer-guided template-based implant dentistry. Clin. Oral Implants Res. 2009, 20 (Suppl. 4), 73–86. [Google Scholar] [CrossRef] [Green Version]
- Hung, K.-F.; Wang, F.; Wang, H.-W.; Zhou, W.-J.; Huang, W.; Wu, Y.-Q. Accuracy of a real-time surgical navigation system for the placement of quad zygomatic implants in the severe atrophic maxilla: A pilot clinical study. Clin. Implant. Dent. Relat. Res. 2017, 19, 458–465. [Google Scholar] [CrossRef]
- Tahmaseb, A.; Wismeijer, D.; Coucke, W.; Derksen, W. Computer technology applications in surgical implant dentistry: A systematic review. Int. J. Oral Maxillofac. Implants 2014, 29, 25–42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cosola, S.; Toti, P.; Peñarrocha-Diago, M.; Covani, U.; Brevi, B.C.; Peñarrocha-Oltra, D. Standardization of three-dimensional pose of cylindrical implants from intraoral radiographs: A preliminary study. BMC Oral Health 2021, 21, 100. [Google Scholar] [CrossRef] [PubMed]
- De Santis, D.; Graziani, P.; Castellani, R.; Zanotti, G.; Gelpi, F.; Marconcini, S.; Bertossi, D.; Nocini, P.F. A New Radiologic Protocol and a New Occlusal Radiographic Index for Computer-Guided Implant Surgery. J. Craniofac. Surg. 2016, 27, e506–e510. [Google Scholar] [CrossRef] [PubMed]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
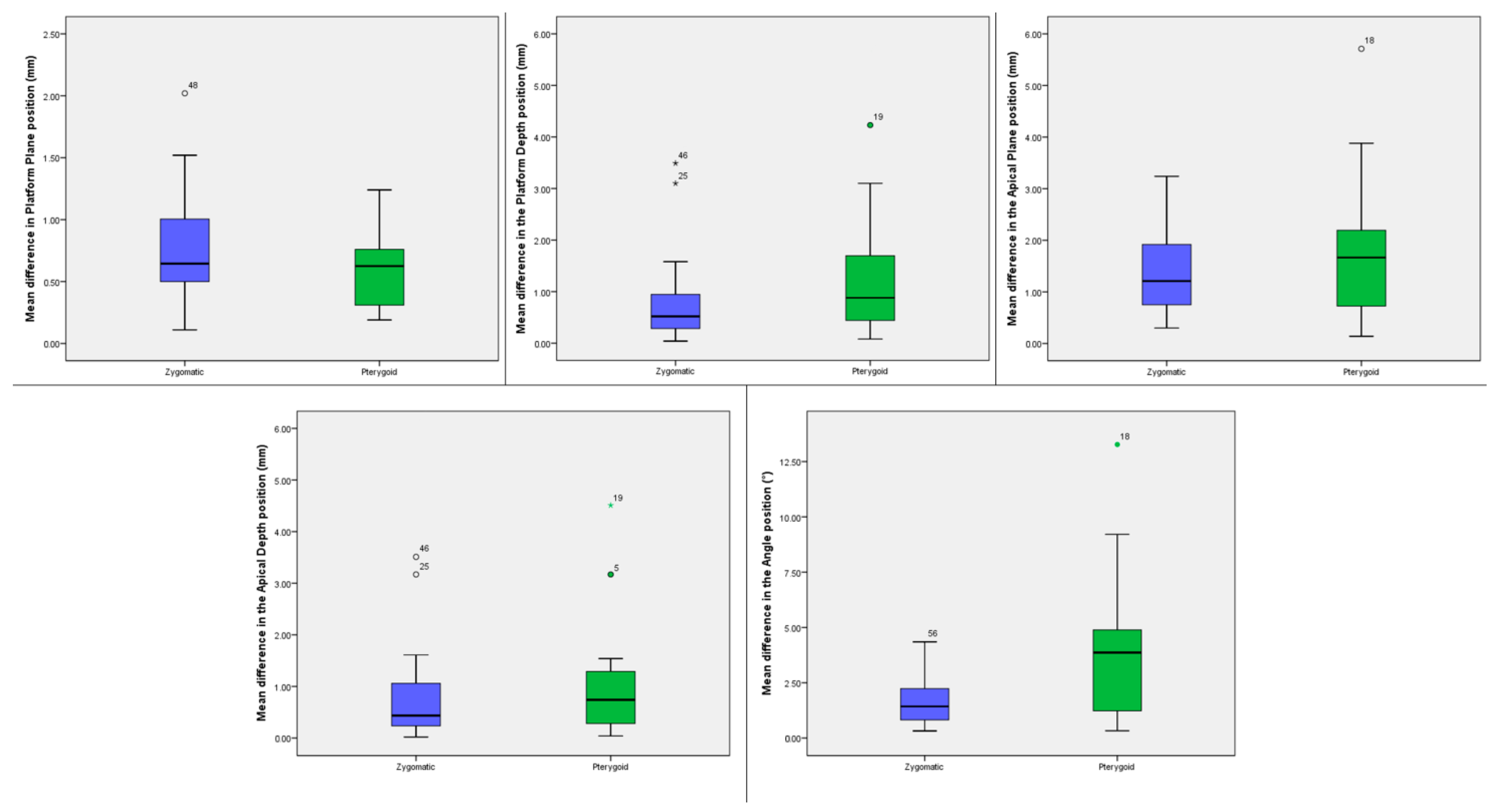
| Zygomatic | Pterygoid | p-Value | |
|---|---|---|---|
| Platform plane (mm) | 0.76 ± 0.41 | 0.61 ± 0.28 | 0.144 |
| Platform depth(mm) | 0.93 ± 1.23 | 1.35 ± 1.45 | 0.256 |
| Apical plane (mm) | 1.35 ± 0.78 | 1.81 ± 1.47 | 0.213 |
| Apical depth (mm) | 1.07 ± 1.47 | 1.22 ± 1.44 | 0.711 |
| Angle position (°) | 1.69 ± 1.12 | 4.15 ± 3.53 | 0.006 |
| Zygomatic | |||
|---|---|---|---|
| Left Side | Right Side | p-Value | |
| Platform plane (mm) | 0.86 ± 0.44 | 0.67 ± 0.36 | 0.163 |
| Platform depth (mm) | 0.64 ± 0.43 | 1.17 ± 1.59 | 0.204 |
| Apical plane (mm) | 1.32 ± 0.84 | 1.38 ± 0.76 | 0.799 |
| Apical depth (mm) | 0.65 ± 0.45 | 1.41 ± 1.88 | 0.095 |
| Angle position (°) | 1.65 ± 1.20 | 1.72 ± 1.09 | 0.864 |
| Pterygoid | |||
| Platform plane (mm) | 0.62 ± 0.15 | 0.59 ± 0.37 | 0.801 |
| Platform depth (mm) | 1.24 ± 1.64 | 1.47 ± 1.30 | 0.741 |
| Apical plane (mm) | 1.70 ± 1.57 | 1.91 ± 1.43 | 0.762 |
| Apical depth (mm) | 1.09 ± 1.52 | 1.35 ± 1.43 | 0.703 |
| Angle position (°) | 3.89 ± 3.73 | 4.42 ± 3.49 | 0.748 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grecchi, F.; Stefanelli, L.V.; Grivetto, F.; Grecchi, E.; Siev, R.; Mazor, Z.; Del Fabbro, M.; Pranno, N.; Franchina, A.; Di Lucia, V.; et al. A Novel Guided Zygomatic and Pterygoid Implant Surgery System: A Human Cadaver Study on Accuracy. Int. J. Environ. Res. Public Health 2021, 18, 6142. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18116142
Grecchi F, Stefanelli LV, Grivetto F, Grecchi E, Siev R, Mazor Z, Del Fabbro M, Pranno N, Franchina A, Di Lucia V, et al. A Novel Guided Zygomatic and Pterygoid Implant Surgery System: A Human Cadaver Study on Accuracy. International Journal of Environmental Research and Public Health. 2021; 18(11):6142. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18116142
Chicago/Turabian StyleGrecchi, Francesco, Luigi V. Stefanelli, Fabrizio Grivetto, Emma Grecchi, Rami Siev, Ziv Mazor, Massimo Del Fabbro, Nicola Pranno, Alessio Franchina, Vittorio Di Lucia, and et al. 2021. "A Novel Guided Zygomatic and Pterygoid Implant Surgery System: A Human Cadaver Study on Accuracy" International Journal of Environmental Research and Public Health 18, no. 11: 6142. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18116142