Providing Ancillary Services with Wind Turbine Generators Based on DFIG with a Two-Branch Static Converter

 , ,
, , 
Abstract
:1. Introduction
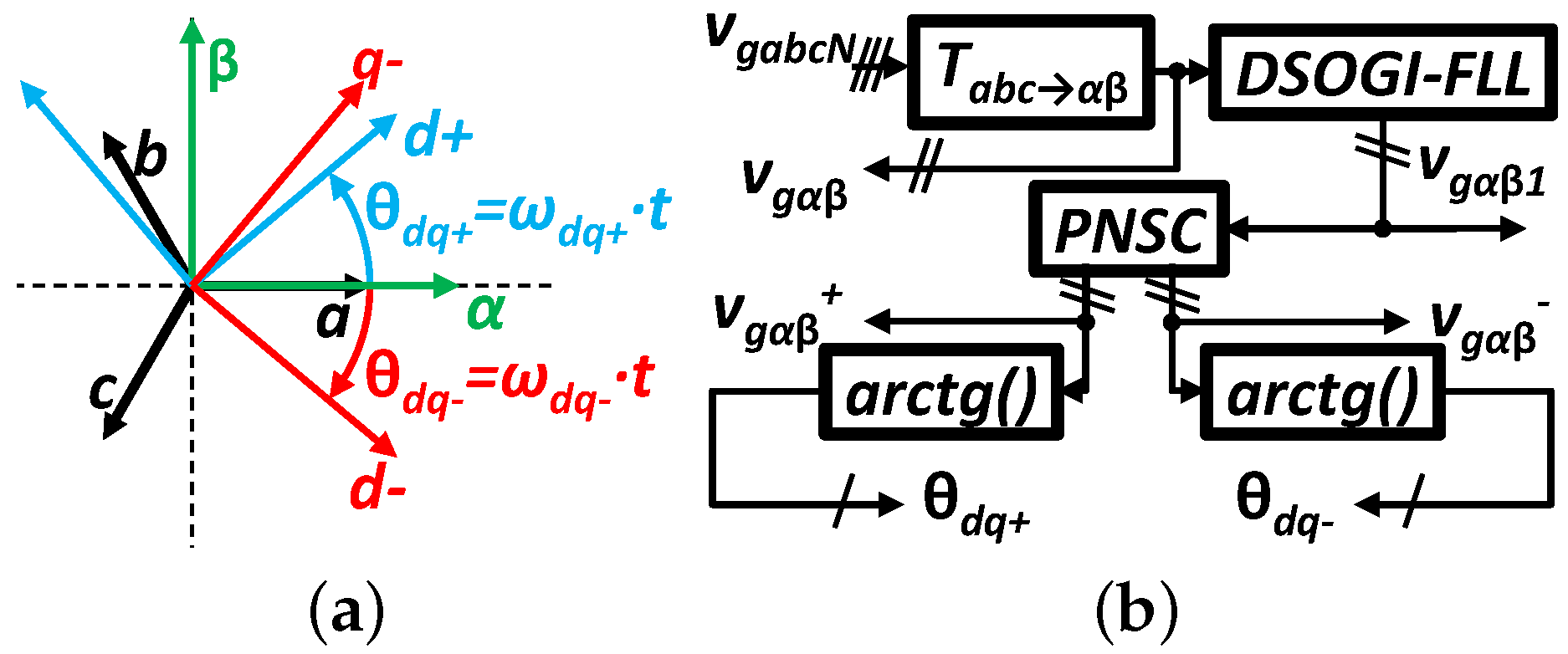
2. Reference Frame and Synchronization System
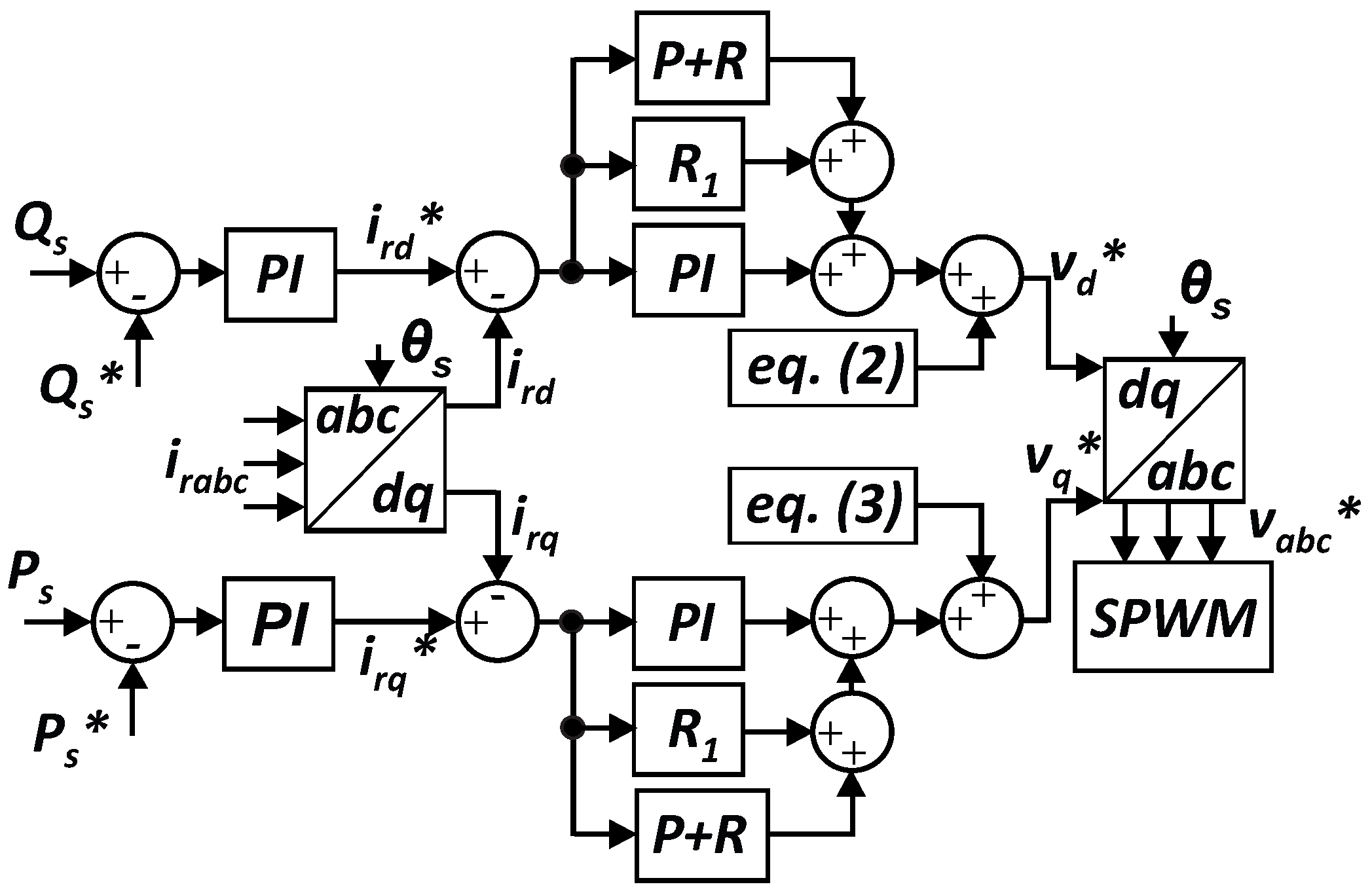
3. Rotor-Side Converter Control Strategy
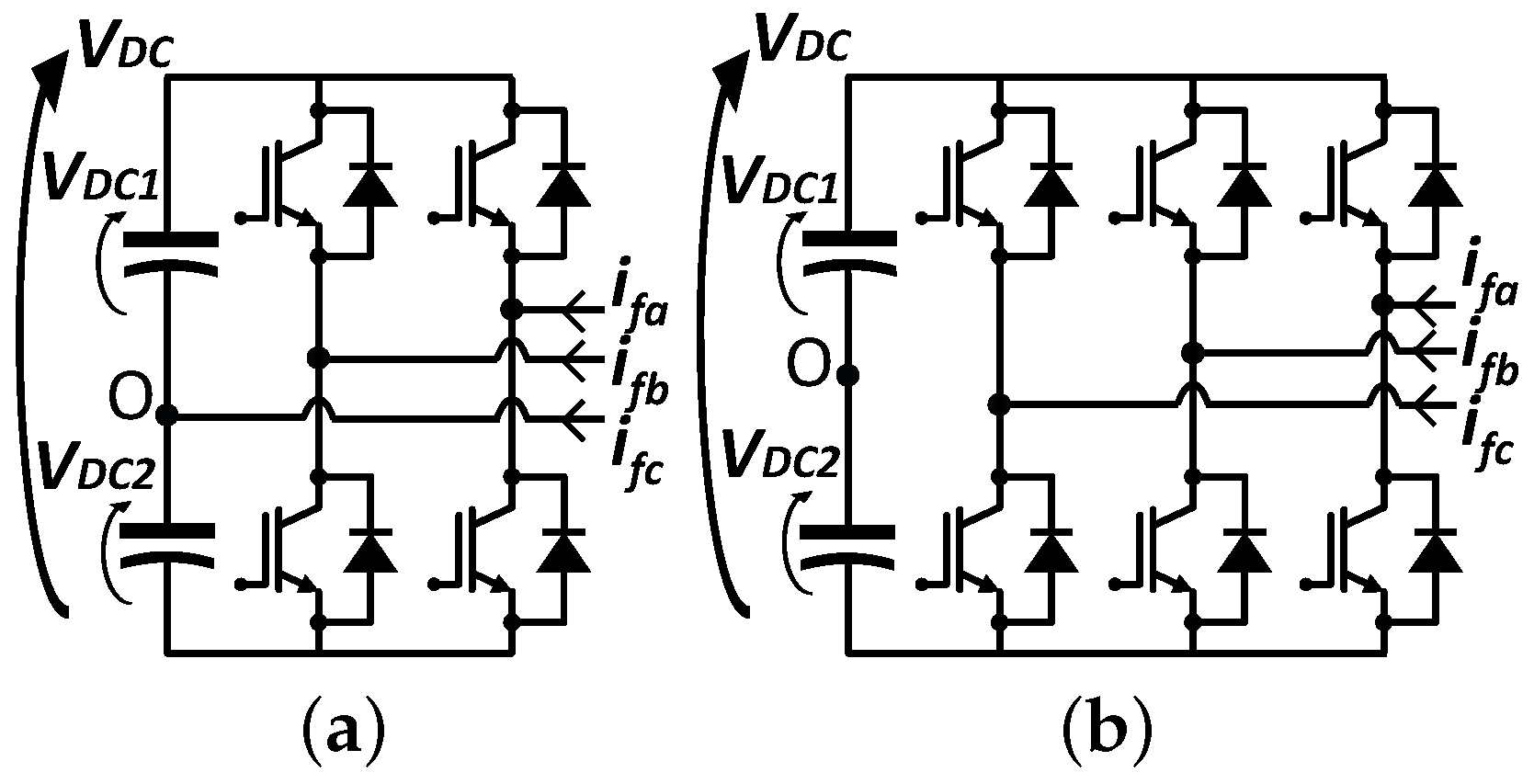
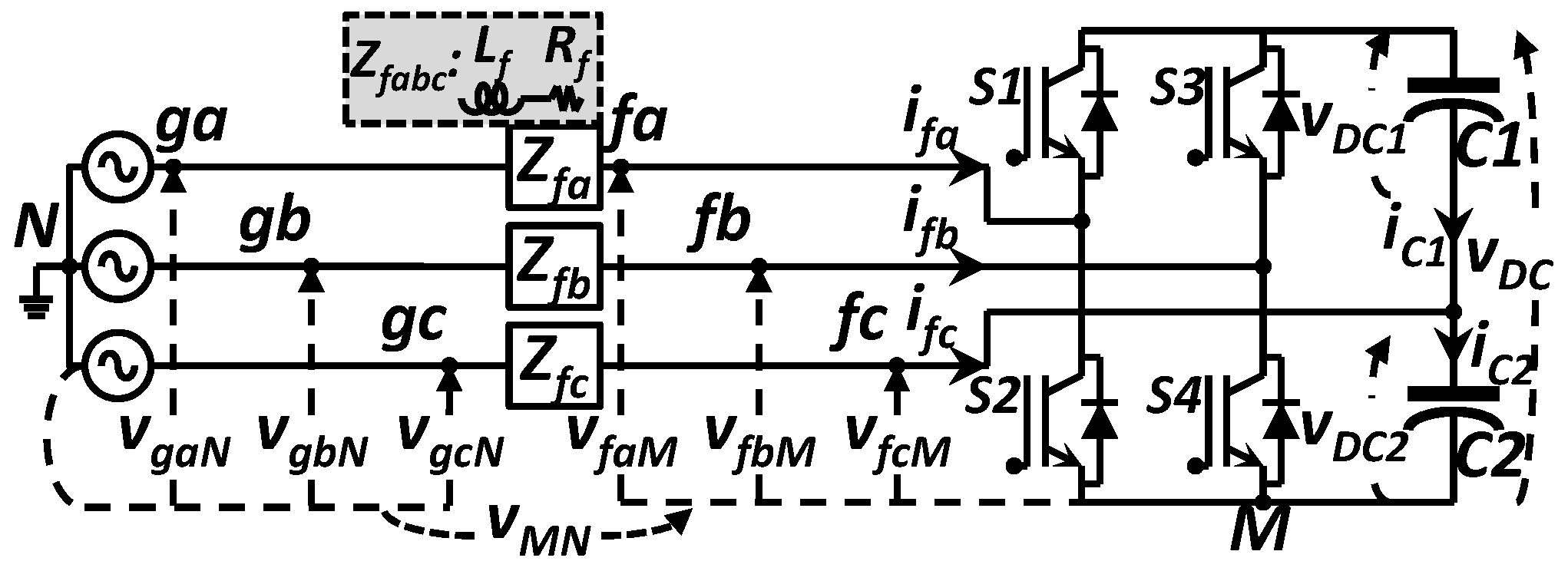
4. Grid-Side Converter with 2L2B Topology
5. Grid-Side Converter Control Strategy
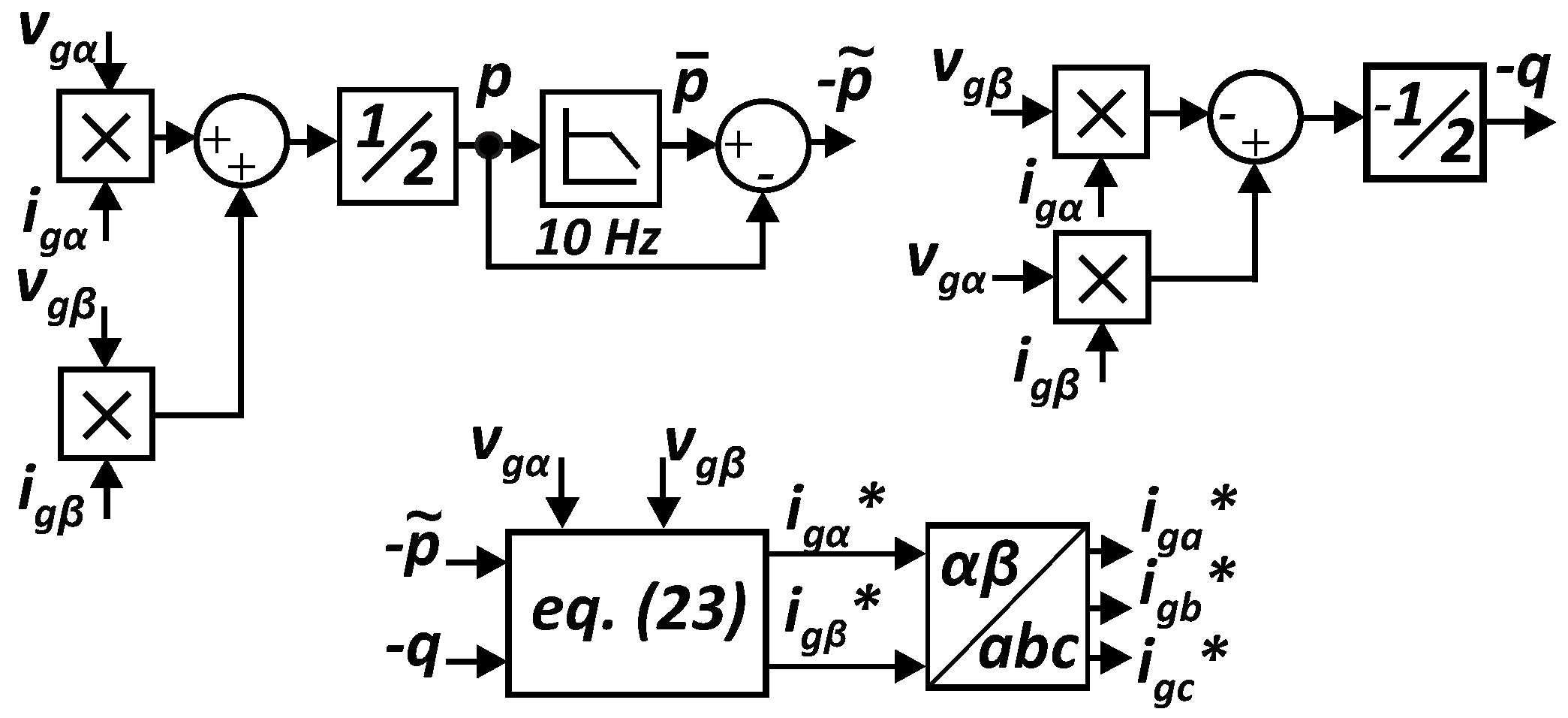
5.1. Harmonic Filtering and Reactive Power Compensation
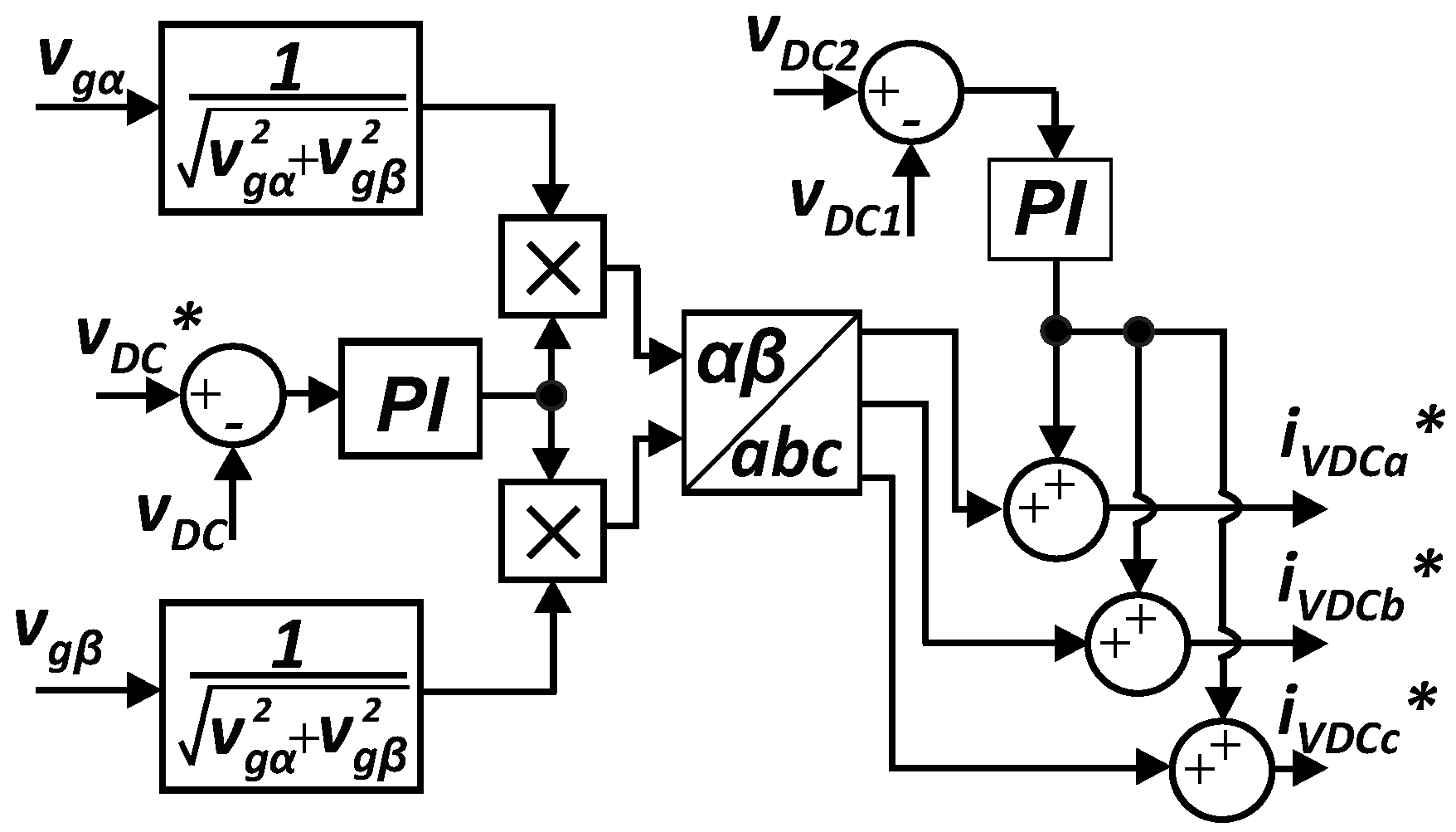
5.2. DC-Link Regulation
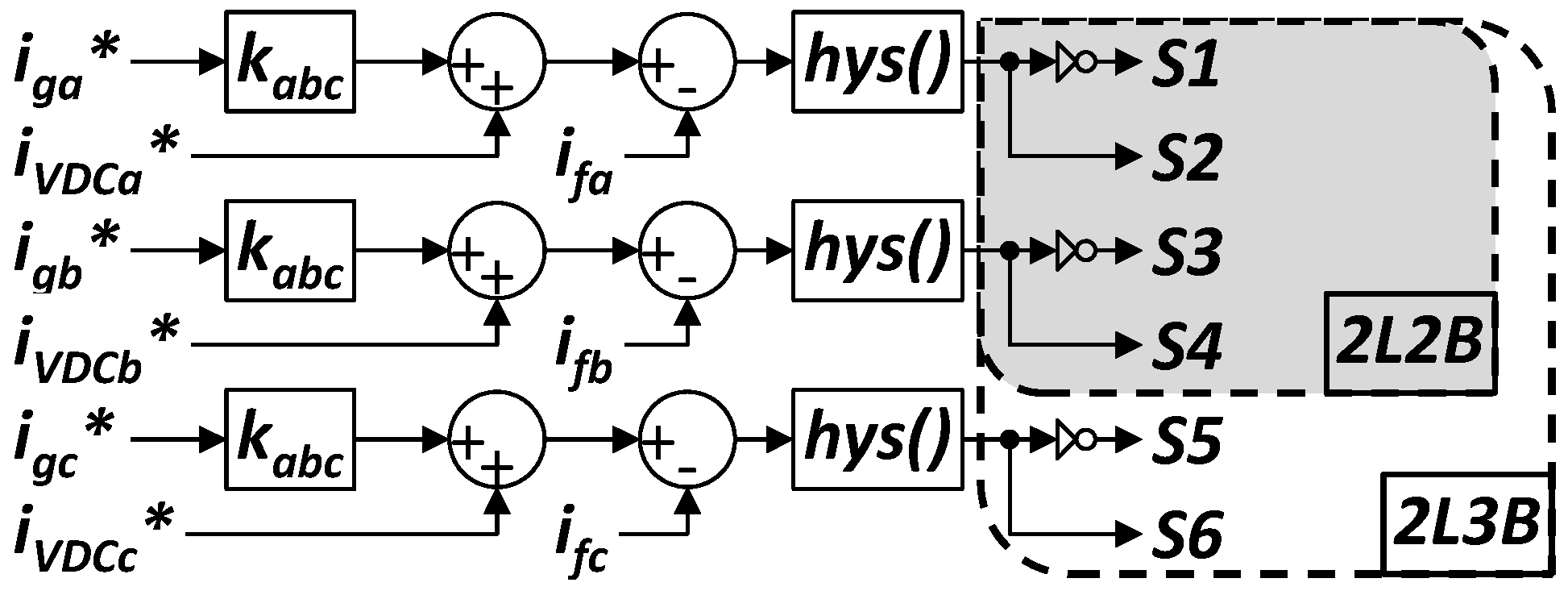
5.3. Hysteresis Band Modulation Technique
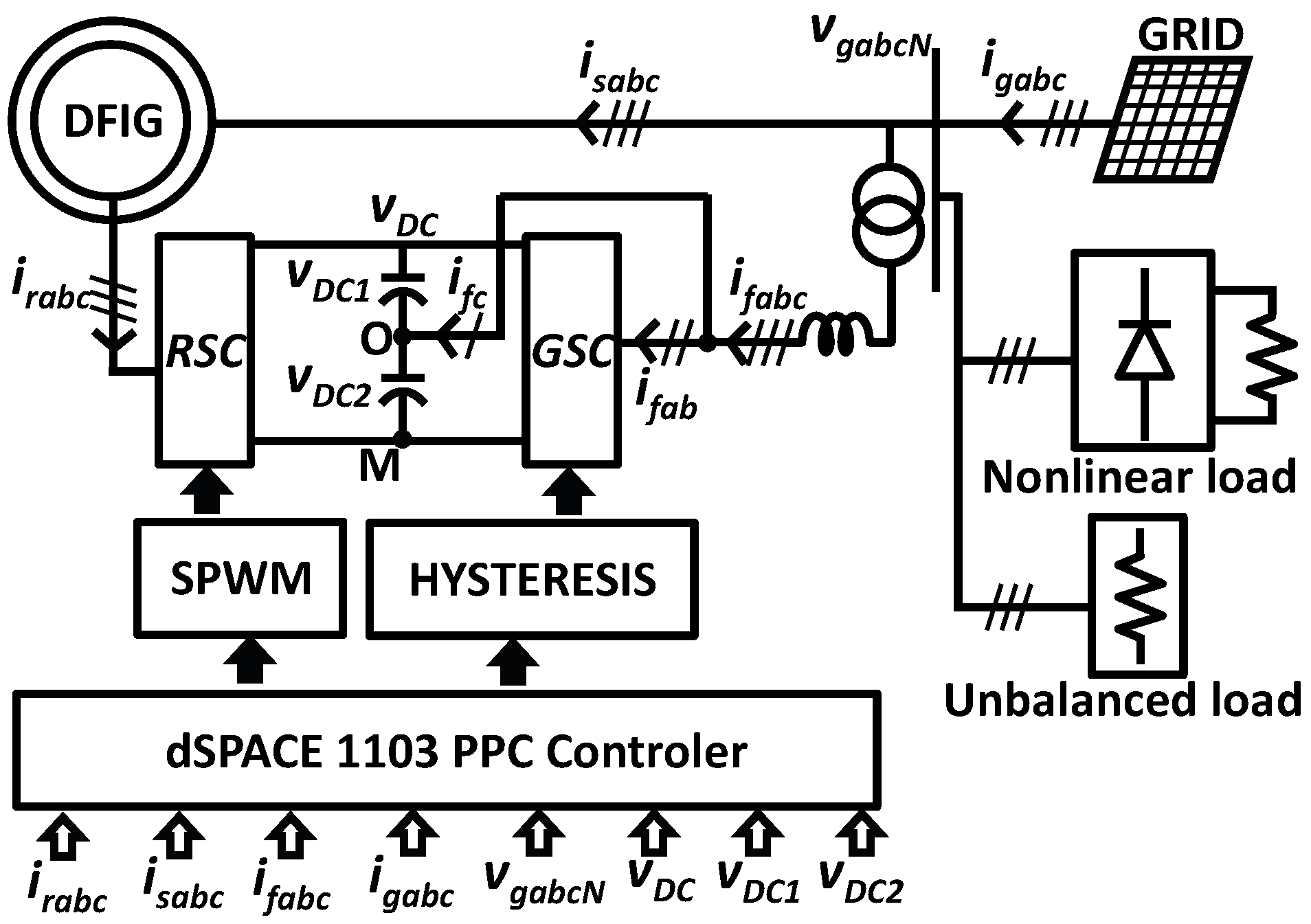
6. Experimental Setup and Experimental Results
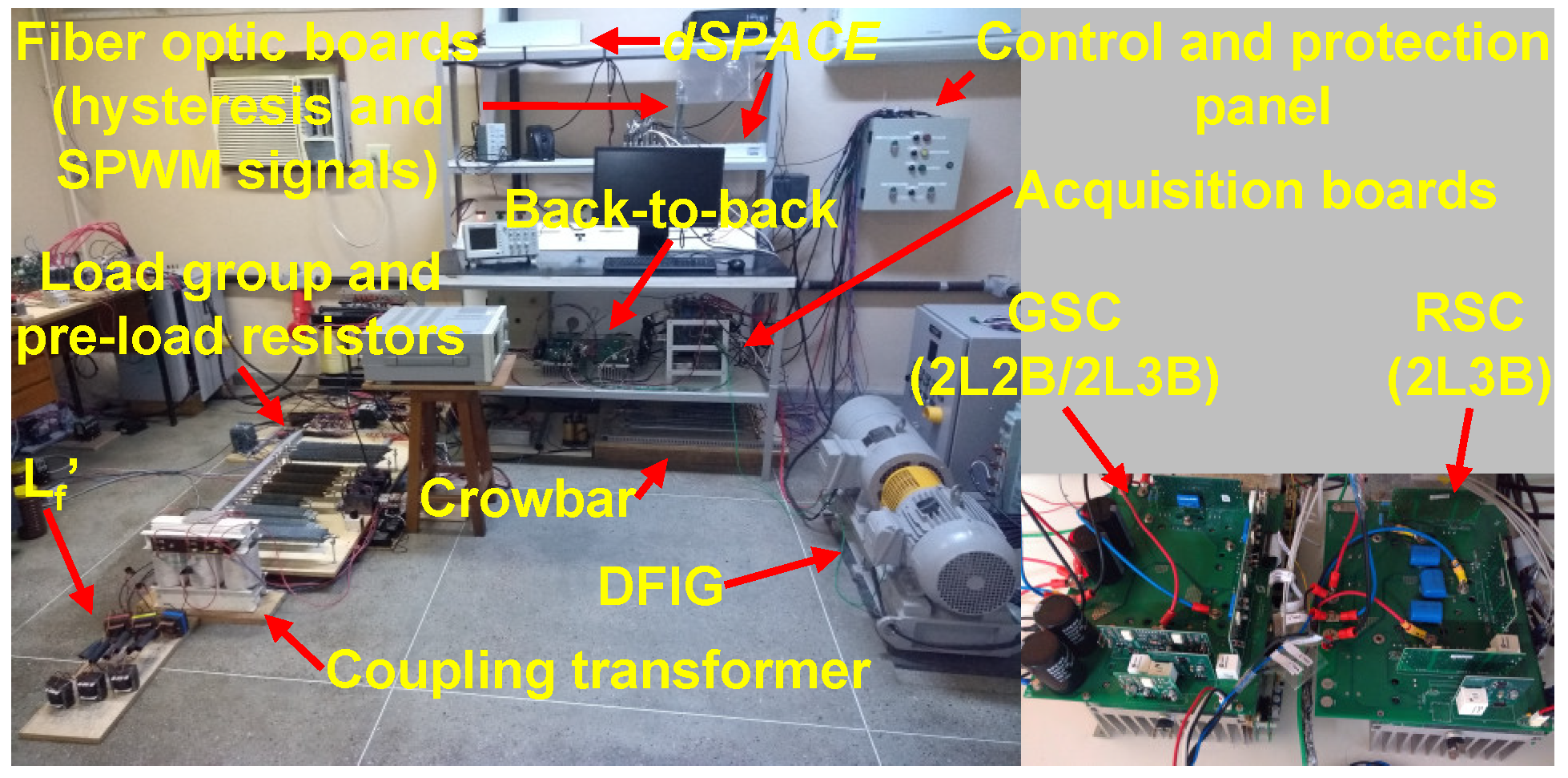
6.1. Experimental Setup
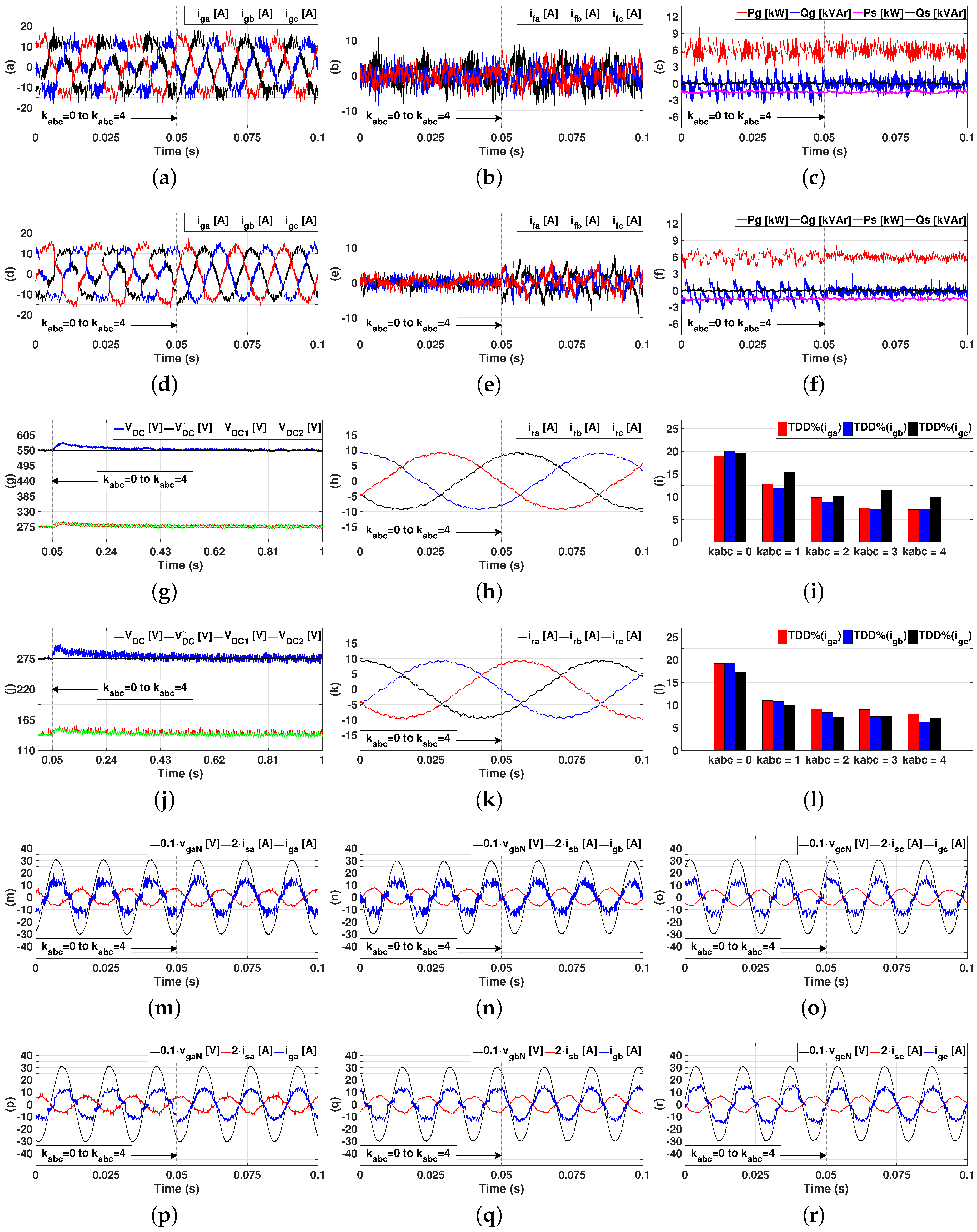
6.2. Experimental Results
6.3. Comparative Analysis Between the 2L2B and 2L3B Topologies
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sawyer, S.; Liming, Q.; Fried, L. GLOBAL WIND REPORT— Annual Market Update 2017; Global Wind Energy Council: Brussels, Belgium, 2017. [Google Scholar]
- Kim, H.S.; Lu, D.D. Review on wind turbine generators and power electronic converters with the grid-connection issues. In Proceedings of the 2010 20th Australasian Universities Power Engineering Conference, Christchurch, New Zealand, 5–8 December 2010; pp. 1–6. [Google Scholar]
- Guerrero, J.M.; Blaabjerg, F.; Zhelev, T.; Hemmes, K.; Monmasson, E.; Jemei, S.; Comech, M.P.; Granadino, R.; Frau, J.I. Distributed Generation: Toward a New Energy Paradigm. IEEE Ind. Electron. Mag. 2010, 4, 52–64. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Sen, P.C.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Liserre, M.; Ma, K. Power Electronics Converters for Wind Turbine Systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Solsona, J.A. Fault Ride-Through Enhancement of DFIG-Based Wind Generation Considering Unbalanced and Distorted Conditions. IEEE Trans. Energy Convers. 2012, 27, 775–783. [Google Scholar] [CrossRef]
- Djurović, S.; Vilchis-Rodriguez, D.S.; Smith, A.C. Supply Induced Interharmonic Effects in Wound Rotor and Doubly-Fed Induction Generators. IEEE Trans. Energy Convers. 2015, 30, 1397–1408. [Google Scholar] [CrossRef]
- Yan, S.; Zhang, A.; Zhang, H.; Wang, J.; Cai, B. An Optimum Design for a DC-Based DFIG System by Regulating Gearbox Ratio. IEEE Trans. Energy Convers. 2018, 33, 223–231. [Google Scholar] [CrossRef]
- Tentzerakis, S.T.; Papathanassiou, S.A. An Investigation of the Harmonic Emissions of Wind Turbines. IEEE Trans. Energy Convers. 2007, 22, 150–158. [Google Scholar] [CrossRef]
- Song, Y.; Nian, H. Enhanced Grid-Connected Operation of DFIG Using Improved Repetitive Control Under Generalized Harmonic Power Grid. IEEE Trans. Energy Convers. 2015, 30, 1019–1029. [Google Scholar] [CrossRef]
- Swami Naidu, N.K.; Singh, B. Doubly Fed Induction Generator for Wind Energy Conversion Systems with Integrated Active Filter Capabilities. IEEE Trans. Ind. Inform. 2015, 11, 923–933. [Google Scholar] [CrossRef]
- Xu, H.; Hu, J.; He, Y. Integrated Modeling and Enhanced Control of DFIG Under Unbalanced and Distorted Grid Voltage Conditions. IEEE Trans. Energy Convers. 2012, 27, 725–736. [Google Scholar] [CrossRef]
- Xu, H.; Hu, J.; He, Y. Operation of Wind-Turbine-Driven DFIG Systems Under Distorted Grid Voltage Conditions: Analysis and Experimental Validations. IEEE Trans. Power Electron. 2012, 27, 2354–2366. [Google Scholar] [CrossRef]
- Hu, J.; Xu, H.; He, Y. Coordinated Control of DFIG’s RSC and GSC Under Generalized Unbalanced and Distorted Grid Voltage Conditions. IEEE Trans. Ind. Electron. 2013, 60, 2808–2819. [Google Scholar] [CrossRef]
- Larose, C.; Gagnon, R.; Prud’Homme, P.; Fecteau, M.; Asmine, M. Type-III Wind Power Plant Harmonic Emissions: Field Measurements and Aggregation Guidelines for Adequate Representation of Harmonics. IEEE Trans. Sustain. Energy 2013, 4, 797–804. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K. Future on Power Electronics for Wind Turbine Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Sujod, M.Z.; Erlich, I. A new protection scheme for three-level NPC converter based DFIG using zero state control. In Proceedings of the IEEE PES ISGT Europe 2013, Lyngby, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Liao, Y.; Li, R.; Putrus, G.A.; Smith, K.S. Evaluation of the effects of rotor harmonics in a doubly-fed induction generator with harmonic induced speed ripple. IEEE Trans. Energy Convers. 2003, 18, 508–515. [Google Scholar] [CrossRef]
- Nian, H.; Song, Y. Direct Power Control of Doubly Fed Induction Generator Under Distorted Grid Voltage. IEEE Trans. Power Electron. 2014, 29, 894–905. [Google Scholar] [CrossRef]
- Song, Y.; Nian, H. Modularized Control Strategy and Performance Analysis of DFIG System Under Unbalanced and Harmonic Grid Voltage. IEEE Trans. Power Electron. 2015, 30, 4831–4842. [Google Scholar] [CrossRef]
- Djurović, S.; Williamson, S. Influence of supply harmonic voltages on DFIG stator current and power spectrum. In Proceedings of the The XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Song, Y.; Nian, H. Sinusoidal Output Current Implementation of DFIG Using Repetitive Control Under a Generalized Harmonic Power Grid with Frequency Deviation. IEEE Trans. Power Electron. 2015, 30, 6751–6762. [Google Scholar] [CrossRef]
- Wei, F.; Zhang, X.; Vilathgamuwa, D.M.; Choi, S.S.; Wang, S. Mitigation of distorted and unbalanced stator voltage of stand-alone doubly fed induction generators using repetitive control technique. IET Electr. Power Appl. 2013, 7, 654–663. [Google Scholar] [CrossRef]
- Liu, C.; Blaabjerg, F.; Chen, W.; Xu, D. Stator Current Harmonic Control with Resonant Controller for Doubly Fed Induction Generator. IEEE Trans. Power Electron. 2012, 27, 3207–3220. [Google Scholar] [CrossRef]
- Nian, H.; Song, Y. Optimised parameter design of proportional integral and resonant current regulator for doubly fed induction generator during grid voltage distortion. IET Renew. Power Gener. 2014, 8, 299–313. [Google Scholar] [CrossRef]
- Phan, V.; Lee, H. Control Strategy for Harmonic Elimination in Stand-Alone DFIG Applications with Nonlinear Loads. IEEE Trans. Power Electron. 2011, 26, 2662–2675. [Google Scholar] [CrossRef]
- Phan, V.; Lee, H. Stationary frame control scheme for a stand-alone doubly fed induction generator system with effective harmonic voltages rejection. IET Electr. Power Appl. 2011, 5, 697–707. [Google Scholar] [CrossRef]
- Sun, D.; Zhou, W. Adaptive PWM for four-switch three-phase inverter. Electron. Lett. 2015, 51. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of three-phase improved power quality AC-DC converters. IEEE Trans. Ind. Electron. 2004, 51, 641–660. [Google Scholar] [CrossRef]
- Bala, S.; Patel, N.; Femandes, B.G. Reduced-switch three-phase active power filter with one cycle control. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; Volume 3, pp. 2333–2339. [Google Scholar] [CrossRef]
- Hsan, K.; Rmili, L.; Rahmani, S.; Al-Haddad, K. A nonlinear control applied to a shunt hybrid power filter with two arms and a midpoint capacitor. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Singh, B.N.; Singh, B.; Chandra, A.; Rastgoufard, P.; Al-Haddad, K. An Improved Control Algorithm for Active Filters. IEEE Trans. Power Deliv. 2007, 22, 1009–1020. [Google Scholar] [CrossRef]
- Valouch, V.; Škramlík, J.; Muller, Z.; Švec, J.; Tlustý, J. Optimized half a period switching symmetry applied at grid connected four-switch converter and analytical solution of steady states. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 125–130. [Google Scholar] [CrossRef]
- Haddad, K.; Joos, G. Three phase active filter topology based on a reduced switch count voltage source inverter. In Proceedings of the 30th Annual IEEE Power Electronics Specialists Conference. Record. (Cat. No.99CH36321), Charleston, SC, USA, 1 July 1999; Volume 1, pp. 236–241. [Google Scholar] [CrossRef]
- Arani, A.D.; Aslinezhad, M.H.; Doremami, A.; Soleimanian, D. Introducing a new circuit configuration for three-phase series active power filter to use in electricity distribution networks. In Proceedings of the 2012 Proceedings of 17th Conference on Electrical Power Distribution, Tehran, Iran, 2–3 May 2012; pp. 1–6. [Google Scholar]
- Wu, J.; Jou, H.; Feng, Y.; Hsu, W.; Huang, M.; Hou, W. Novel Circuit Topology for Three-Phase Active Power Filter. IEEE Trans. Power Deliv. 2007, 22, 444–449. [Google Scholar] [CrossRef]
- Klima, J.; Tlusty, J.; Škramlík, J.; Valouch, V. Analytical Model and Investigation of a Four-Switch Space-Vector Modulated Hybrid Power Filter with SixFold Switching Symmetry. Renew. Energy Power Qual. J. 2009, 1. [Google Scholar] [CrossRef]
- Lin, B.R.; Wei, T.C. A novel NPC inverter for harmonics elimination and reactive power compensation. IEEE Trans. Power Deliv. 2004, 19, 1449–1456. [Google Scholar] [CrossRef]
- Lin, B.R.; Chiang, H.K.; Huang, C.H. Three-phase three-level active power filter with a clamped capacitor topology. IEE Proc. Electr. Power Appl. 2006, 153, 513–522. [Google Scholar] [CrossRef]
- Su, J.; Sun, D. Simplified MPCC for four-switch three-phase inverter-fed PMSM. Electron. Lett. 2017, 53, 1108–1109. [Google Scholar] [CrossRef]
- Sun, D.; He, Z.; He, Y.; Guan, Y. Four-Switch Inverter Fed PMSM DTC with SVM approach for Fault Tolerant operation. In Proceedings of the 2007 IEEE International Electric Machines Drives Conference, Antalya, Turkey, 3–5 May 2007; Volume 1, pp. 295–299. [Google Scholar] [CrossRef]
- Gi-Taek, K.; Lipo, T.A. VSI-PWM rectifier/inverter system with a reduced switch count. IEEE Trans. Ind. Appl. 1996, 32, 1331–1337. [Google Scholar] [CrossRef]
- Izanlo, A.; Asghar Gholamian, S.; Kazemi, M. Using of four-switch three-phase converter in the structure DPC of DFIG under unbalanced grid voltage condition. Electr. Eng. 2017. [Google Scholar] [CrossRef]
- Lin, B.; Chen, J. Three-Phase Two-Leg Inverter for Stand-Alone and Grid-Connected Renewable Energy Systems. In Proceedings of the TENCON 2006—2006 IEEE Region 10 Conference, Hong Kong, China, 14–17 November 2006; pp. 1–4. [Google Scholar] [CrossRef]
- Ni, K.; Hu, Y.; Liu, Y.; Gan, C. Performance Analysis of a Four-Switch Three-Phase Grid-Side Converter with Modulation Simplification in a Doubly-Fed Induction Generator-Based Wind Turbine (DFIG-WT) with Different External Disturbances. Energies 2017, 10, 706. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley-IEEE: John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Leonhard, W. Control of Electrical Drives; Power Systems; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Abad, G.; López, J.; Rodríguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation Applications. In Appendix; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- IEEE. 519-2014—IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. In IEEE Std 519-2014 (Revision of IEEE Std 519-1992); IEEE: Piscataway, New Jersey, USA, 2014; pp. 1–29. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 = 0/S3 = 0 | S1 = 1/S3 = 0 | S1 = 1/S3 = 0 | S1 = 1/S3 = 1 | |
|---|---|---|---|---|
| 0 | 0 | |||
| 0 | 0 | |||
| 0 | 0 |
| Switching State | a | b | c | S1 |
|---|---|---|---|---|
| SS1 | 0 | 0 | 0 | 1 |
| SS2 | 0 | 0 | 1 | 0 |
| SS3 | 0 | 1 | 0 | 1 |
| SS4 | 0 | 1 | 1 | 0 |
| SS5 | 1 | 0 | 0 | 1 |
| SS6 | 1 | 0 | 1 | 0 |
| SS7 | 1 | 1 | 0 | 1 |
| SS8 | 1 | 1 | 1 | 0 |
| DFIG (8 kVA/4 poles) | |
| Operation Mode/Slip | Sub-synchronous/20% |
| Stator Reference Power | = 1.5 kW/ = 0 kvar |
| Back-to-Back Converter (4.5 kVA) | |
| IGBT | IRG4PF50WD |
| and | 680 F/400 V |
| RSC Switching Frequency | 10 kHz |
| 550 Vdc (2L2B)/275 Vdc (2L3B) | |
| GSC Input Impedance | |
| Coupling Transformer | 5 kVA/2.22%/Y-Y(380 V-190 V) |
| 1 mH | |
| Group of Linear and Nonlinear Loads | |
| Linear Load (3 Resistors) | 0.75 kW/1.0 kW/1.5 kW |
| Nonlinear Load (3- rectifier) | 3.7 kW |
| 2L2B Topology | 2L3B Topology | |||||
|---|---|---|---|---|---|---|
| Phase a | Phase b | Phase c | Phase a | Phase b | Phase c | |
| 23.3 | 25.8 | 24.8 | 21.1 | 20.8 | 19.0 | |
| Phase a | Phase b | Phase c | Phase a | Phase b | Phase c | |
| 13.7 | 13.3 | 15.4 | 11.5 | 10.1 | 10.0 | |
| Negative Points | Positive Points | |
|---|---|---|
| Experimental Results |
|
|
| Construction Details |
|
|
| Operational Characteristics | ||
| Risks and Problems |
| |
| Advantages |
| |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morais, E.E.C.; Lima, F.K.d.A.; Fonseca, J.M.L.; Branco, C.G.C.; Machado, L.d.A. Providing Ancillary Services with Wind Turbine Generators Based on DFIG with a Two-Branch Static Converter. Energies 2019, 12, 2490. https://0-doi-org.brum.beds.ac.uk/10.3390/en12132490
Morais EEC, Lima FKdA, Fonseca JML, Branco CGC, Machado LdA. Providing Ancillary Services with Wind Turbine Generators Based on DFIG with a Two-Branch Static Converter. Energies. 2019; 12(13):2490. https://0-doi-org.brum.beds.ac.uk/10.3390/en12132490
Chicago/Turabian StyleMorais, Ernande Eugenio C., Francisco Kleber de A. Lima, Jean M. L. Fonseca, Carlos G. C. Branco, and Lívia de A. Machado. 2019. "Providing Ancillary Services with Wind Turbine Generators Based on DFIG with a Two-Branch Static Converter" Energies 12, no. 13: 2490. https://0-doi-org.brum.beds.ac.uk/10.3390/en12132490