
Proportional Usage of Low-Level Actions in Model Predictive Control for Six-Phase Electric Drives




 and
and 
Abstract
:1. Introduction
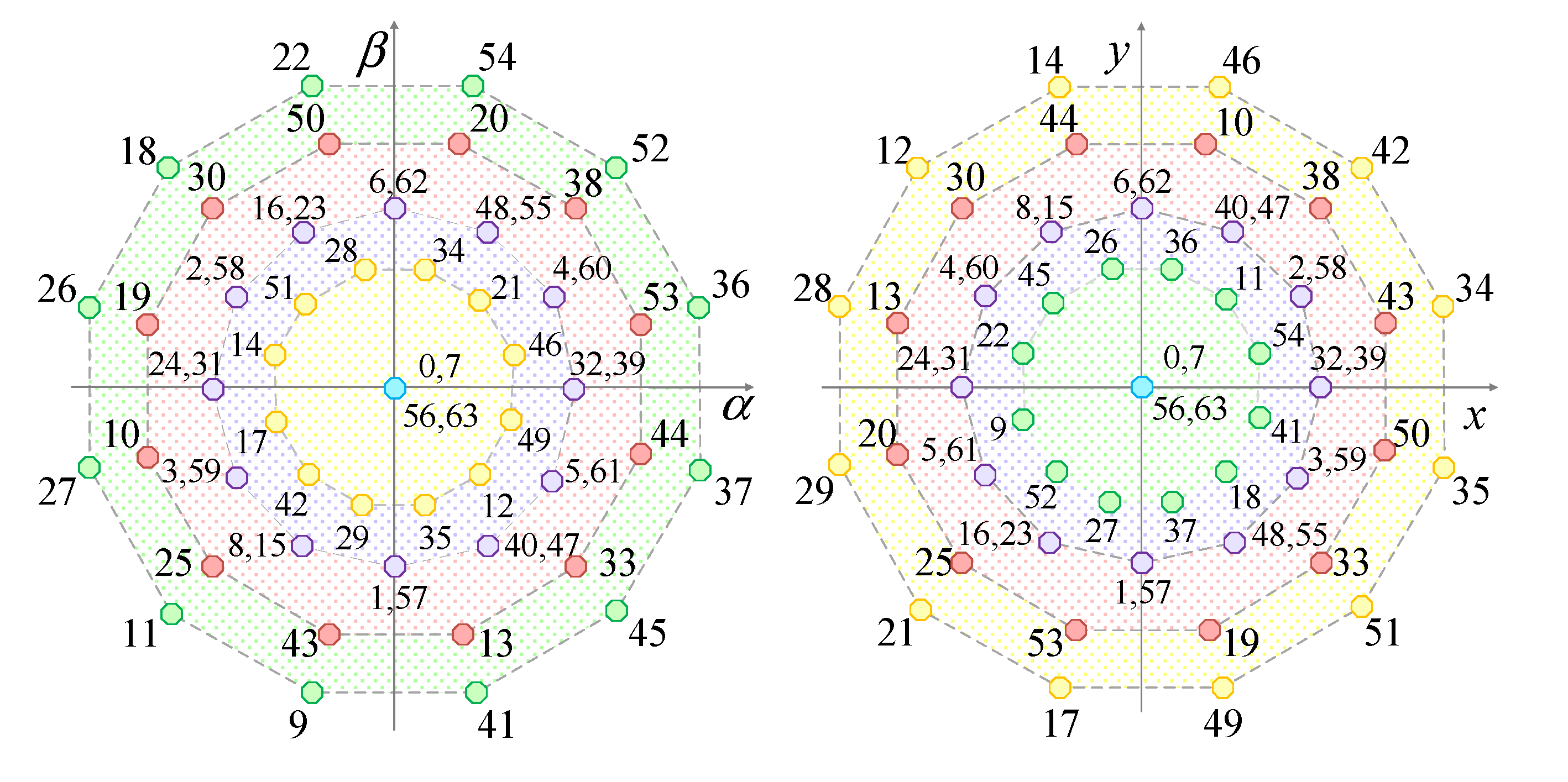
2. Six-Phase Electric Drive Generalities
3. PULLA-MPC Control Scheme
3.1. Control Actions in PULLA-MPC
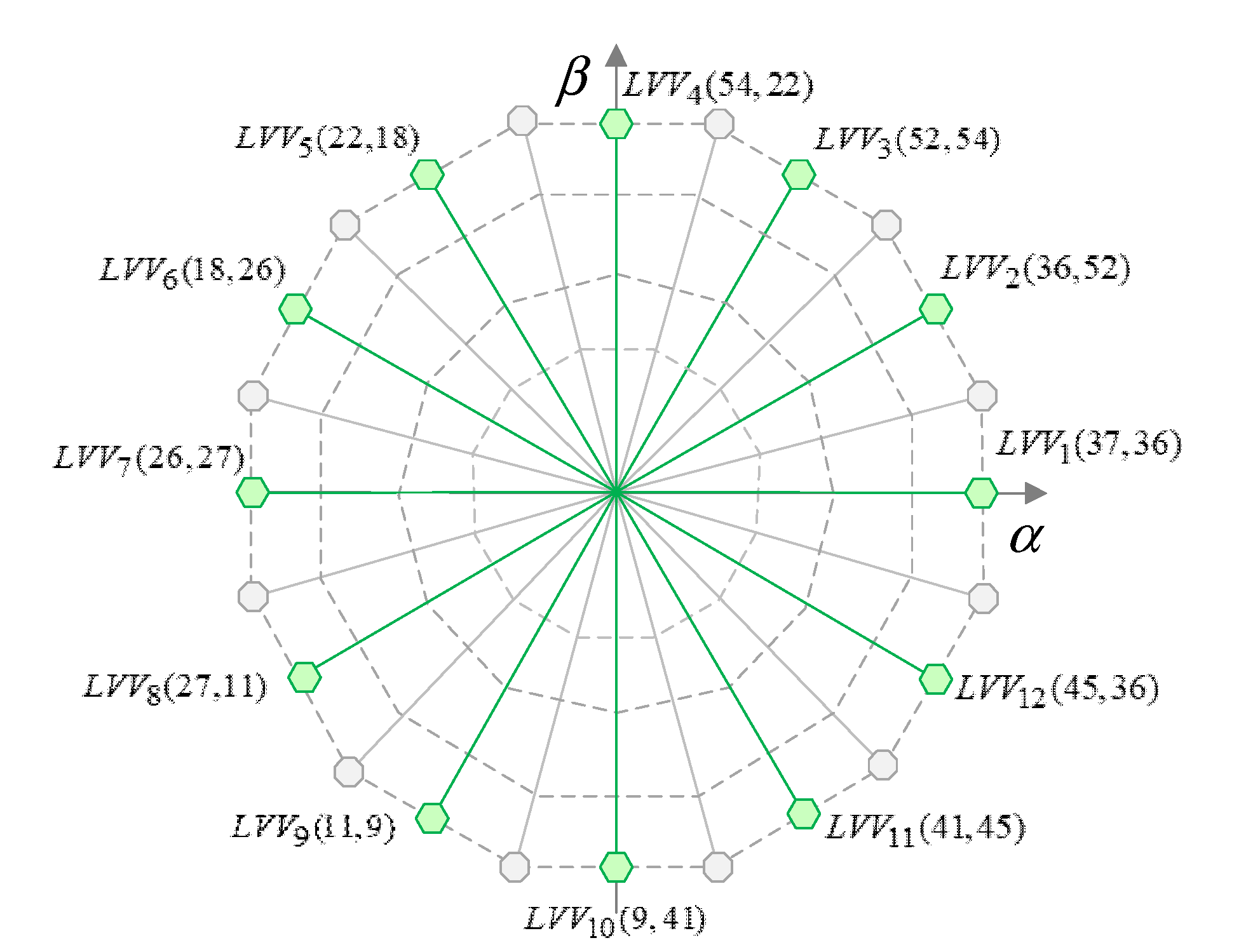
- Tangential - refinement: twelve LVVs can be selected to satisfy tangential requirements (Figure 3).
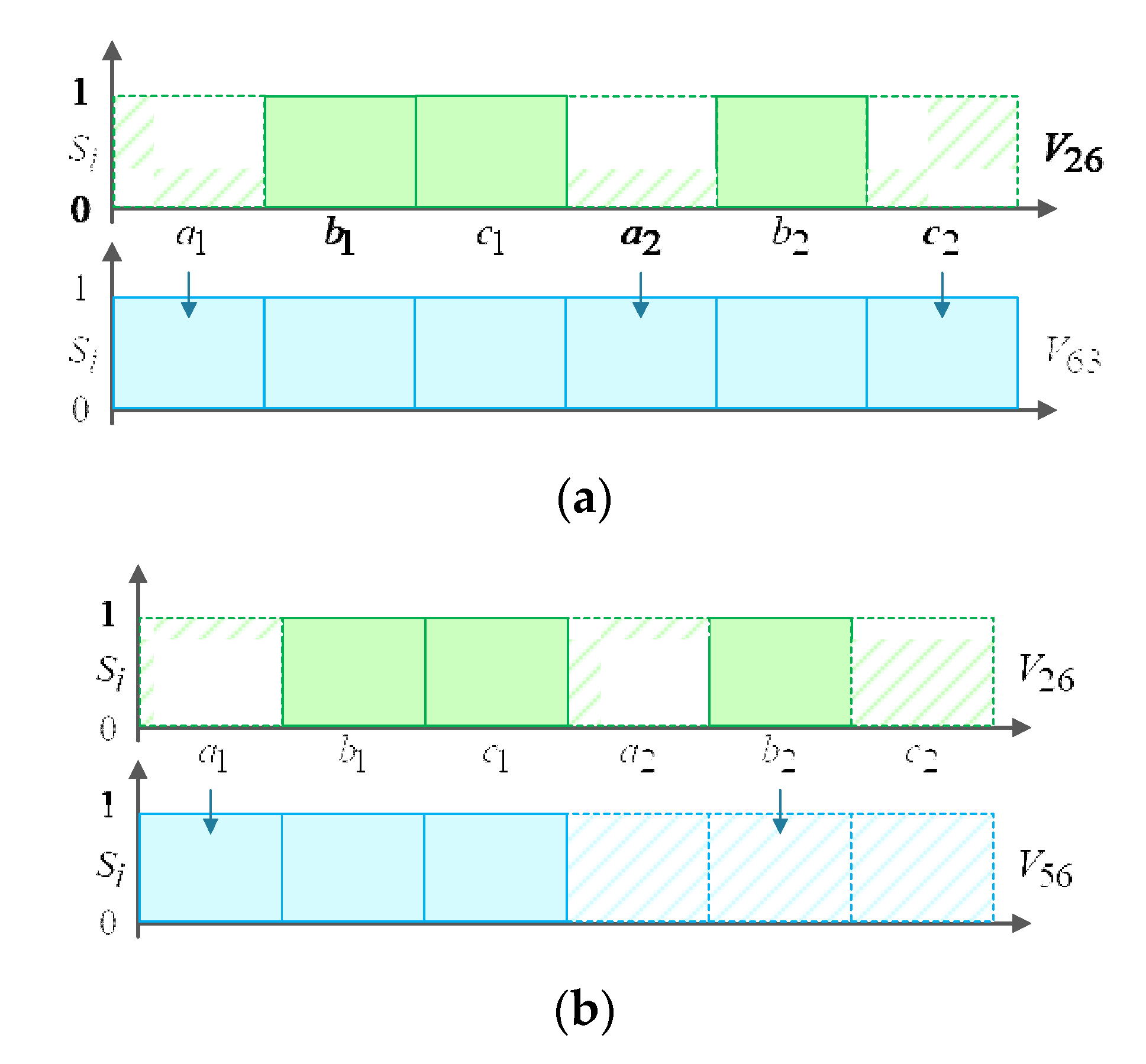
- Radial - refinement: the application time of the null voltage vector, , adapts radial requirements as a function of the working conditions.
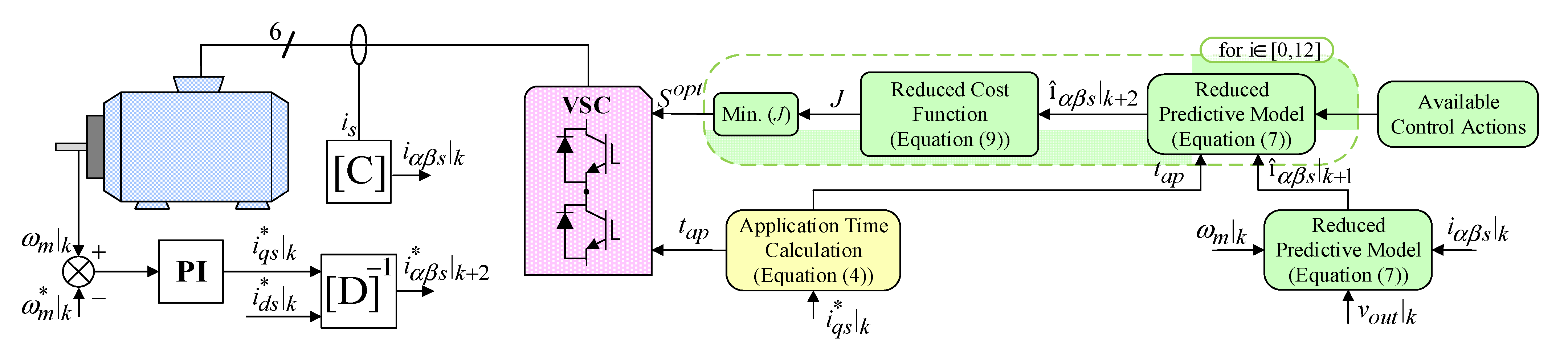
3.2. PULLA-MPC Scheme
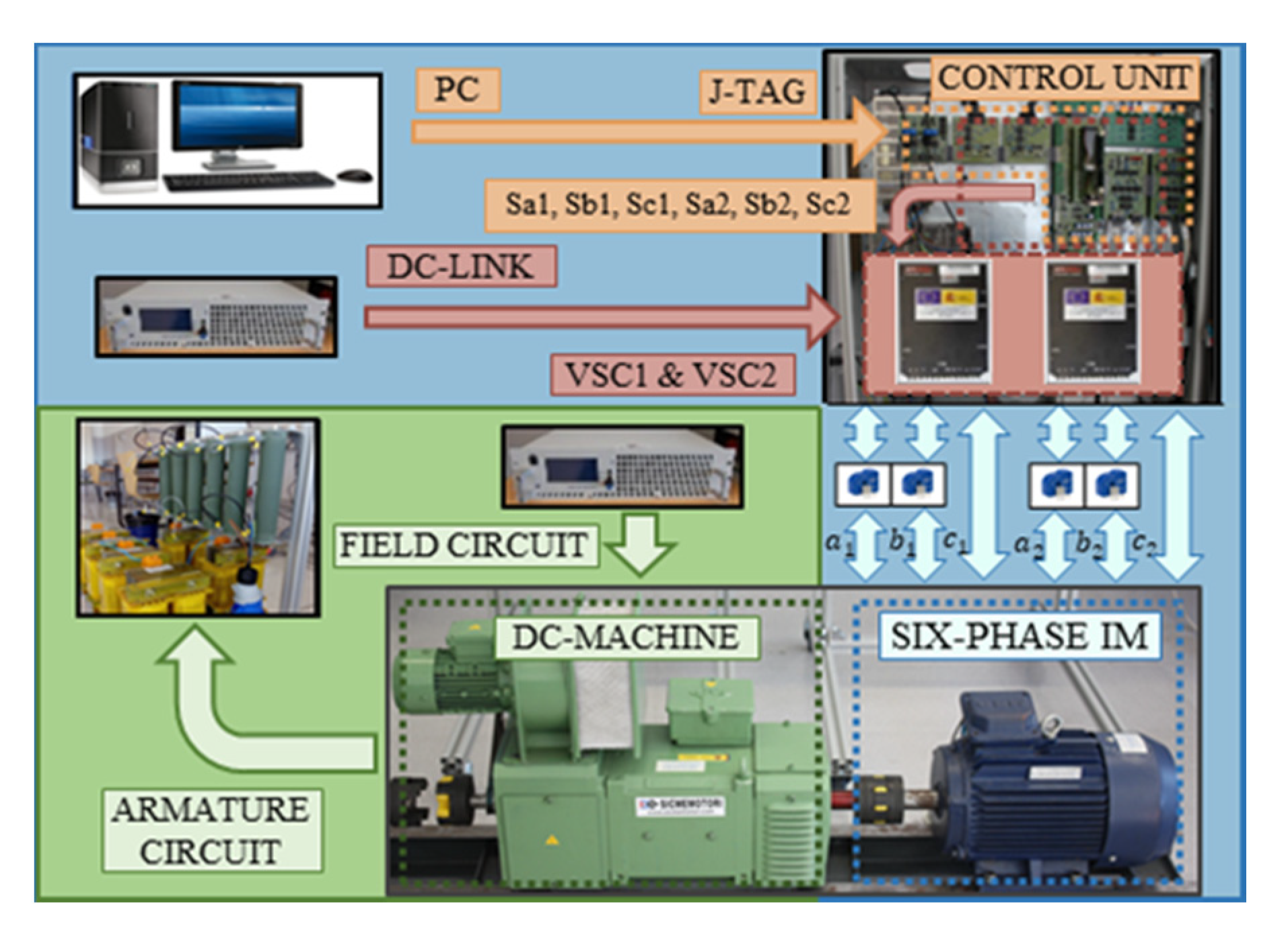
4. Results
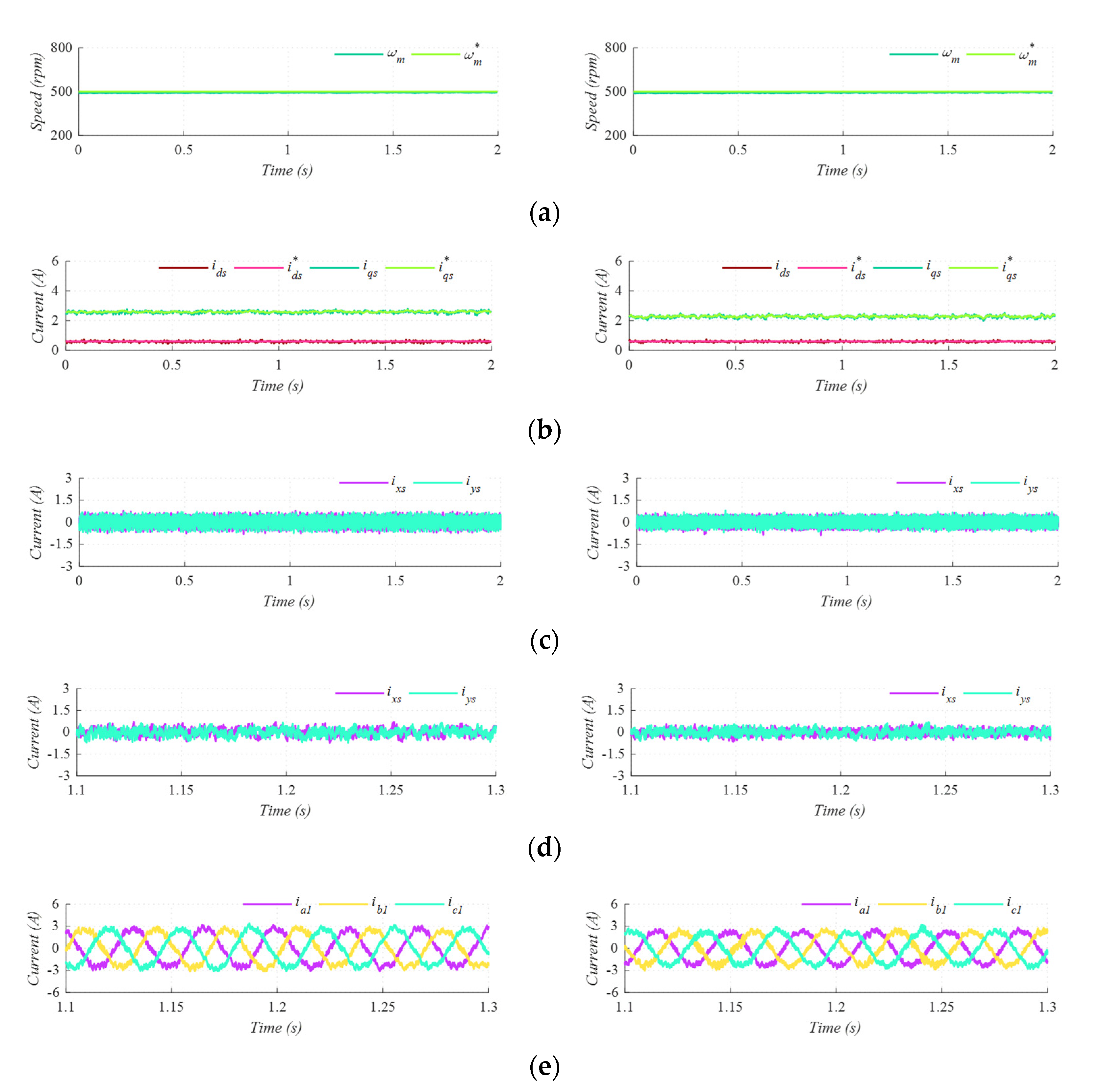
4.1. Test 1. Steady-State Performance of FPULLA-MPC and PULLA-MPC
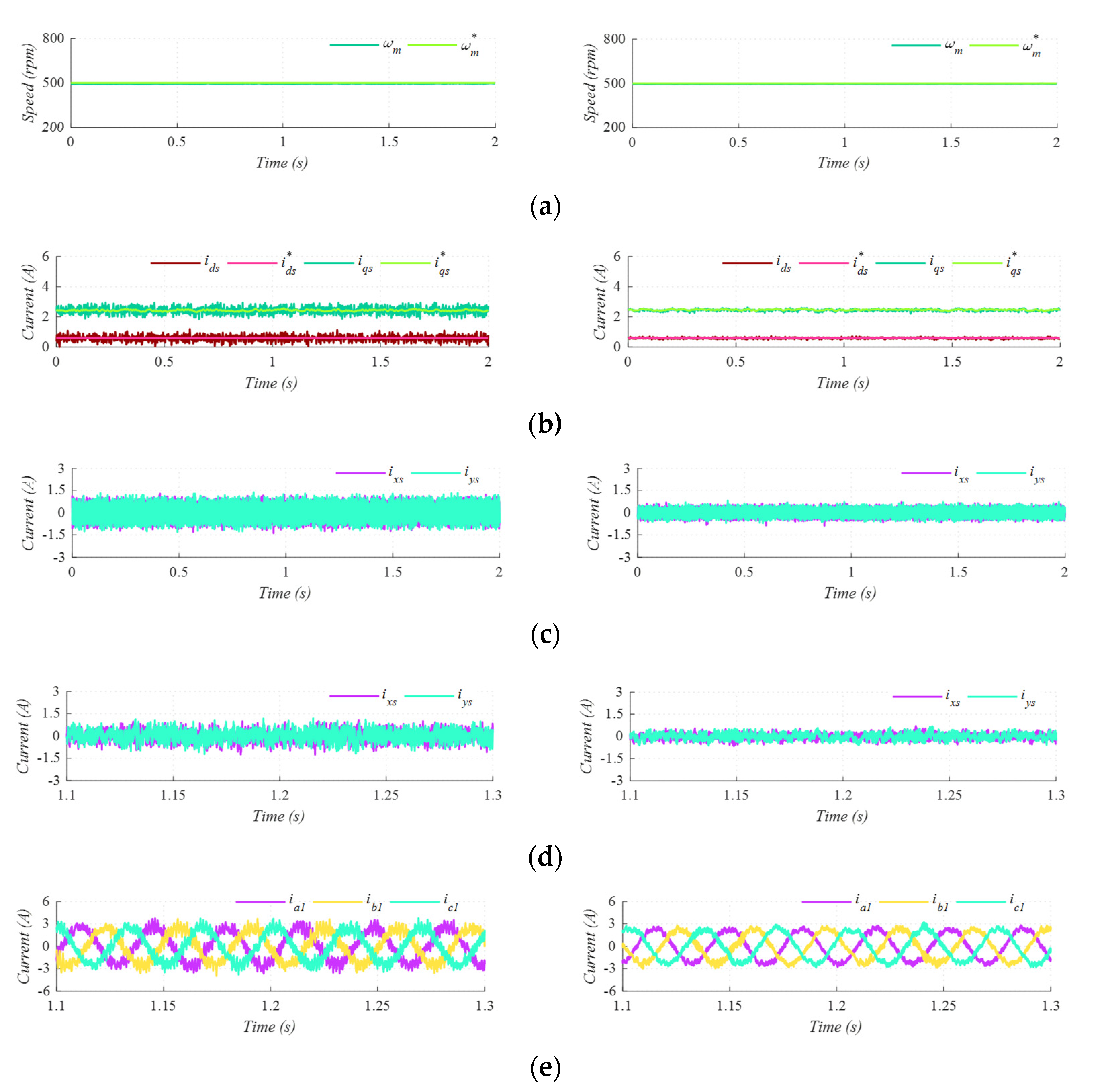
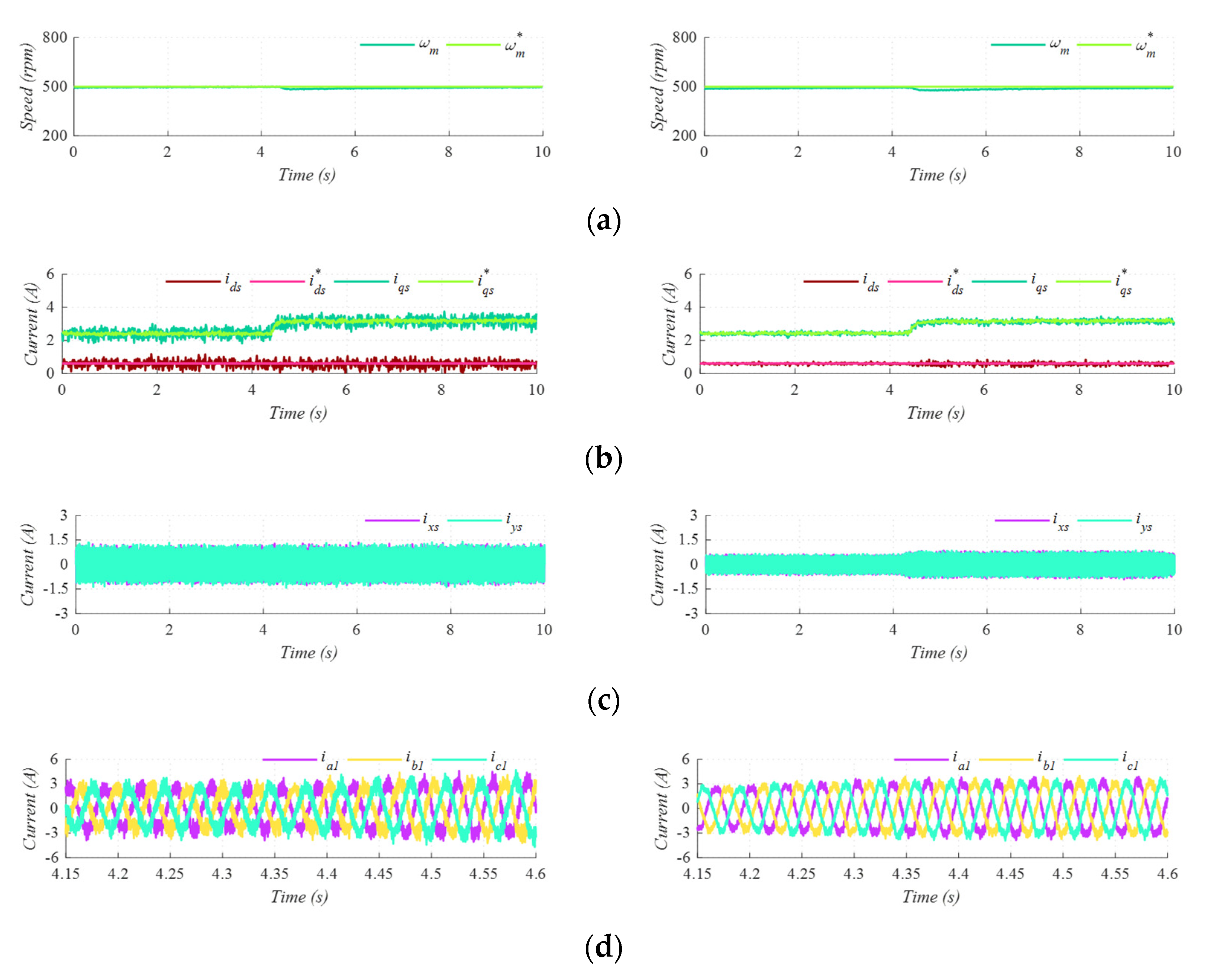
4.2. Test 2. Steady-State Performance of LVV-MPC and PULLA-MPC
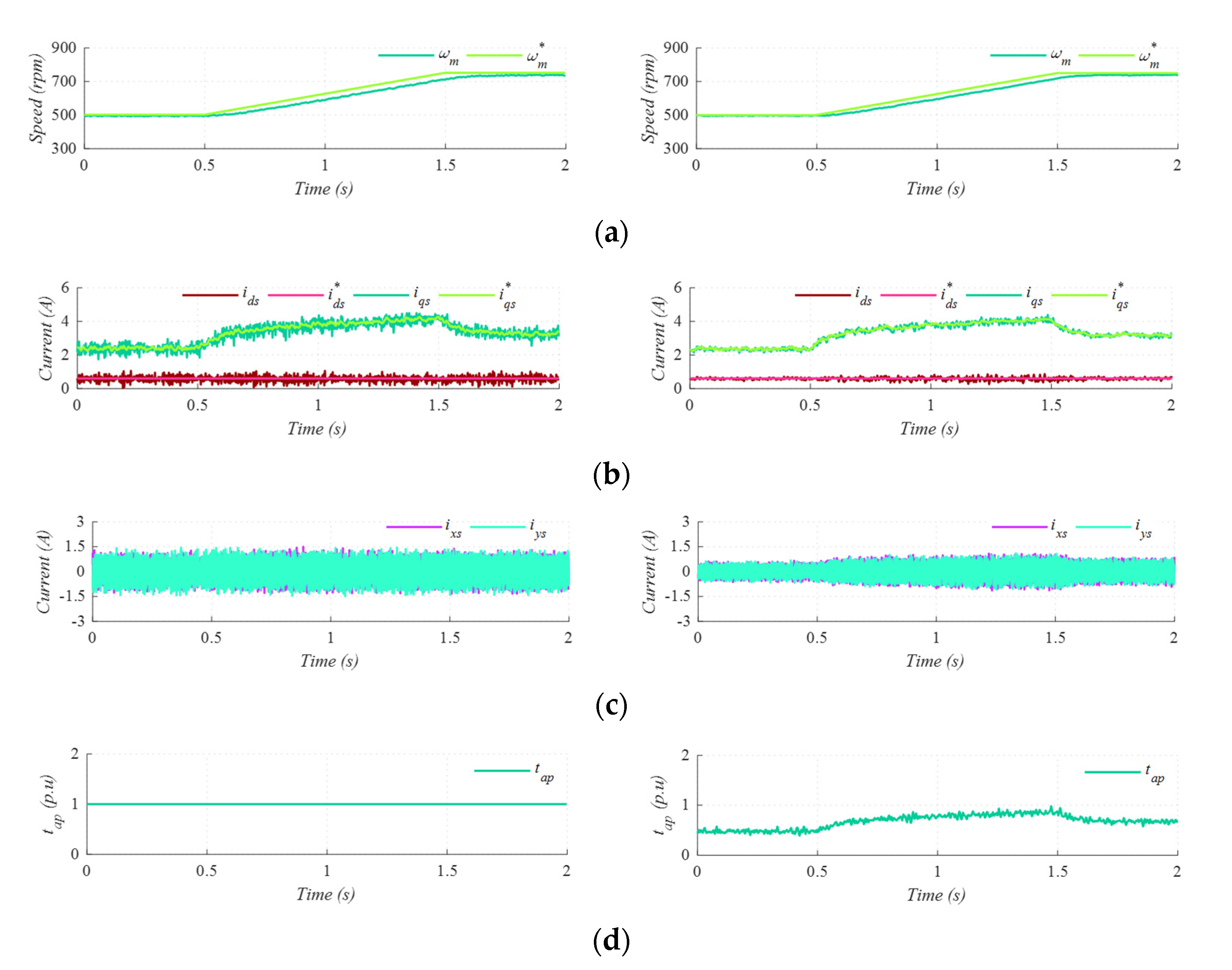
4.3. Test 3. Dynamic Performance of LVV-MPC and PULLA-MPC in a Speed-Ramp Scenario
4.4. Test 4. Dynamic Performance of LVV-MPC and PULLA-MPC in a Load Torque Step
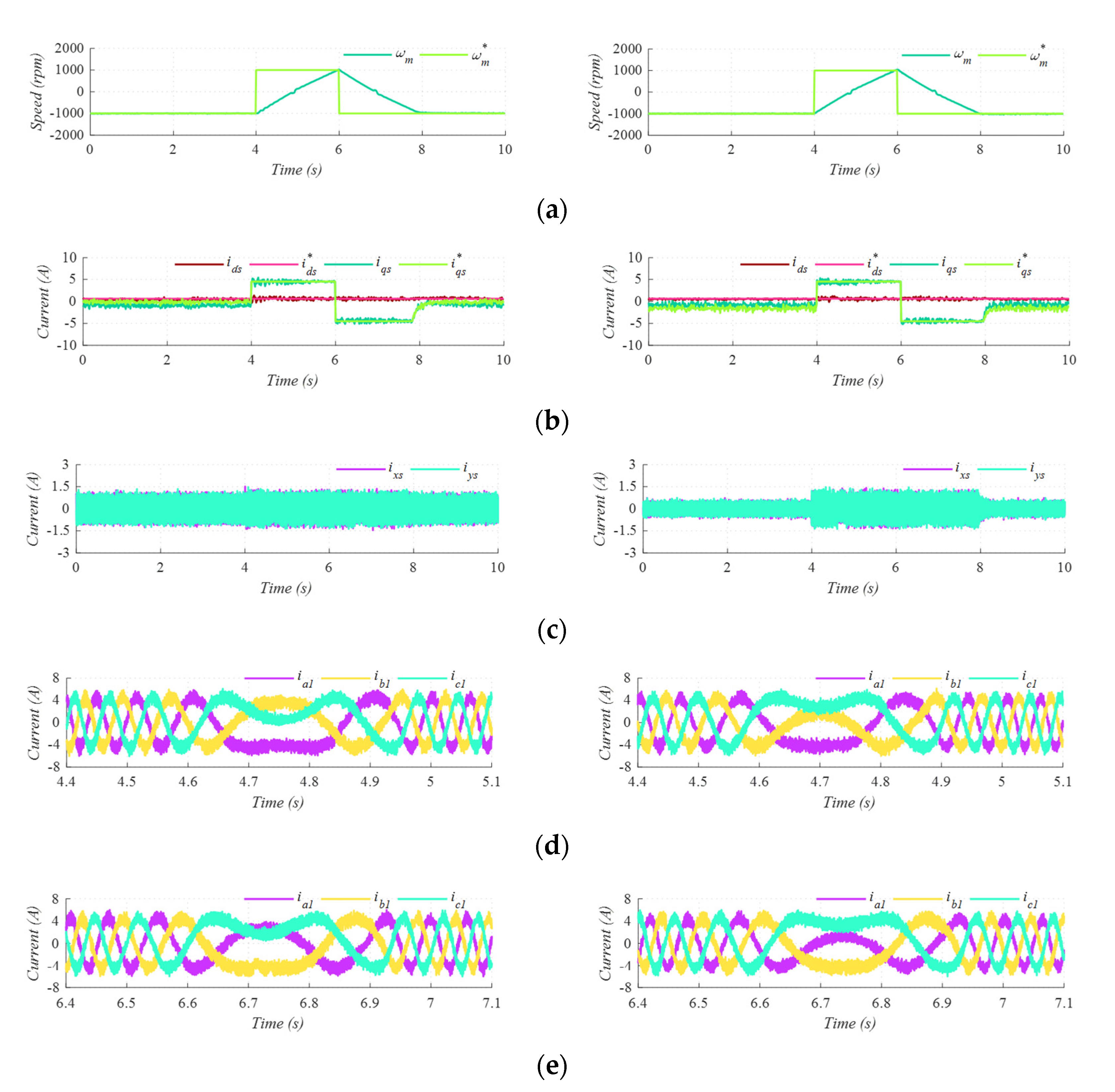
4.5. Test 5. Dynamic Performance of LVV-MPC and PULLA-MPC in a Double Reversal-Speed Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Duran, M.J.; Levi, E.; Barrero, F. Multiphase Electric Drives: Introduction. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017; pp. 1–26. [Google Scholar]
- Levi, E.; Jones, M.; Vukosavi, S.N.; Toliyat, H.A. A novel concept of a multiphase, multimotor vector controlled drive system supplied from a single voltage source inverter. IEEE Trans. Power Electron. 2004, 19, 320–335. [Google Scholar] [CrossRef]
- Duran, M.J.; Gonzalez-Prieto, I.; Gonzalez-Prieto, A.; Barrero, F. Multiphase energy conversion systems connected to microgrids with inequal power-sharing capability. IEEE Trans. Energy Conv. 2017, 32, 1386–1395. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electric Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Finite control set model predictive control of six-phase asymmetrical machines—An overview. Energies 2019, 12, 4693. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Prieto, I.; Zoric, I.; Duran, M.J.; Levi, E. Constrained model predictive control in nine-phase induction motor drives. IEEE Trans. Energy Conver. 2019, 34, 1881–1889. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A flux constrained predictive control for a six-phase PMSM motor with lower complexity. IEEE Trans. Ind. Electron. 2019, 66, 5081–5093. [Google Scholar] [CrossRef]
- Iqbal, A.; Alammari, R.; Mosa, M.; Abu-Rub, H. Finite set model predictive current control with reduced and constant common mode voltage for a five-phase voltage source inverter. In Proceedings of the IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 479–484. [Google Scholar]
- Gonzalez-Prieto, I.; Duran, M.J.; Aciego, J.J.; Martin, C.; Barrero, F. Model predictive control of six-phase induction motor drives using virtual voltage vectors. IEEE Trans. Ind. Electron. 2018, 65, 27–37. [Google Scholar] [CrossRef]
- Garcia-Entrambasaguas, P.; Zoric, I.; Gonzalez-Prieto, I.; Duran, M.J.; Levi, E. Direct torque and predictive control strategies in nine-phase electric drives using virtual voltage vectors. IEEE Trans. Power Electron. 2019, 34, 12106–12119. [Google Scholar] [CrossRef] [Green Version]
- Xue, C.; Song, W.; Wu, X.; Feng, X. Constant switching frequency finite-control-set predictive current control scheme of a five-phase inverter with duty-ratio optimization. IEEE Trans. Power Electron. 2018, 33, 3583–3594. [Google Scholar] [CrossRef]
- Xue, C.; Song, W.; Feng, X. Finite control-set model predictive current control of five-phase permanent-magnet synchronous machine based on virtual voltage vectors. IET Electr. Power Appl. 2017, 11, 836–846. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Multi-Vectors based model predictive torque control for a six-phase PMSM motor with fixed switching frequency. IEEE Trans. Energy Conv. 2019, 34, 1369–1379. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Fixed and variable amplitude virtual vectors for model predictive control of six-phase PMSMS with single neutral configuration. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, Australia, 13–15 February 2019; pp. 267–273. [Google Scholar]
- Luo, Y.; Liu, C. Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor. IEEE Trans. Power Electron. 2019, 34, 6960–6972. [Google Scholar] [CrossRef]
- Aciego, J.J.; Gonzalez Prieto, I.; Duran, M.J. Model predictive control of six-phase induction motor drives using two virtual voltage vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 321–330. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Predictive current control of six-phase permanent magnet synchronous machines with modulated virtual vectors. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 6229–6234. [Google Scholar]
- Tatte, Y.N.; Aware, M.V. Torque ripple and harmonic current reduction in a three-level inverter fed direct-torque-controlled five-phase induction motor. IEEE Trans. Ind. Electron. 2017, 64, 5265–5275. [Google Scholar] [CrossRef]
- Yu, B.; Song, W.; Tang, T.; Wang, S.; Bin, P.Y. A Finite control set model predictive current control scheme for five-phase PMSMS based on optimized duty ratio. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Antheim, CA, USA, 17–21 March 2019. [Google Scholar]
- Duran, M.J.; Gonzalez-Prieto, I.; Gonzalez-Prieto, A. Large virtual voltaje vectors for direct controllers in six-phase electric drives. Int. J. Electron. Power Energy Syst. 2021, 125, 106425–106433. [Google Scholar] [CrossRef]
- Aciego, J.J.; Gonzalez-Prieto, I.; Duran, M.J.; Bermudez, M.; Sales-Biedma, P. Model predictive control based on dynamic voltage vectors for six-phase induction machines. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Duran, M.J. Smart voltage vectors for model predictive control of six-phase electric drives. IEEE Trans. Ind. Electron. 2021, 68, 9024–9035. [Google Scholar] [CrossRef]
- Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gonzalez, O.; Gregor, R.; Rivera, M. A Novel Modulated Model Predictive Control Applied to Six-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2021, 68, 3672–3682. [Google Scholar] [CrossRef]
- Xheng, L.; Fletcher, J.E.; Williams, B.W.; He, X. A novel direct torque control scheme for a sensorless five-phase induction motor drive. IEEE Trans. Ind. Electron. 2011, 58, 503–513. [Google Scholar]
- Pandit, J.K.; Aware, M.V.; Nemade, R.; Tatte, Y. Simplified implementation of synthetic vectors for DTC of asymmetric six-phase induction motor drives. IEEE Trans. Ind. Appl. 2018, 54, 2306–2318. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, Z.Q. Reduction of both harmonic current and torque ripple for dual three-phase permanent-magnet synchronous machine using modified switching-table-based direct torque control. IEEE Trans. Ind. Electron. 2015, 62, 6671–6681. [Google Scholar] [CrossRef]
- Che, H.S.; Levi, E.; Jones, M.; Hew, W.P.; Rahim, N.A. Current control methods for an asymmetrical six-phase induction motor drive. IEEE Trans. Power Electron. 2014, 29, 407–417. [Google Scholar] [CrossRef] [Green Version]
- Zhao., Y.; Lipo, T.A. Space vector PWM control of dual three-phase induction machine using vector space decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Barrero, F.; Bermudez, M.; Guzman, H. Impact of postfault flux adaptation on six-phase induction motor drives with parallel converters. IEEE Trans. Power Electron. 2017, 32, 515–528. [Google Scholar] [CrossRef] [Green Version]
- Yepes, A.G.; Riveros, J.A.; Doval-Gandoy, J.; Barrero, F.; Óscar, L.; Bogado, B.; Jones, M.; Levi, E. Parameter identification of multiphase induction machines with distributed windings-part 1: Sinusoidal excitation methods. IEEE Trans. Energy Conv. 2012, 27, 1056–1066. [Google Scholar] [CrossRef]
- Riveros, J.A. Parameter identification of multiphase induction machines with distributed windings-part 2: Time-domain techniques. IEEE Trans. Energy Conv. 2012, 27, 1067–1077. [Google Scholar] [CrossRef]
- Hossein, H.; Faranda, R. A New Approach for Power Losses Evaluation of IGBT/Diode Module. Electronics 2021, 10, 280. [Google Scholar]
- Nicolai, U.; Wintrich, A. Application Note AN 1403, Determining Switching Losses of SEMIKRON IGBT Modules. SEMIKRON International GmbH. 2014. Available online: https://www.semikron.com/service-support/downloads/detail/semikron-application-note-determining-switching-losses-of-semikron-igbt-modules-en-2014-08-19-rev-00.html (accessed on 12 July 2021).
- Datasheet IGBT SK30GB128 Modules. SEMIKRON International GmbH. 2006. Available online: https://datasheetspdf.com/pdf-file/831859/SemikronInternational/SK30GAL128/1 (accessed on 12 July 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power | |
| Maximum -current () | 4.5 A |
| Stator Resistance () | |
| Rotor Resistance () | |
| Mutual Inductance () | |
| Stator Leakage Inductance () | |
| Rotor Leakage Inductance () | |
| DC-Link Voltage () |
| Control Method | THD | |
|---|---|---|
| PULLA-MPC | 11.61% | 4.96 kHz |
| FPULLA | 12.65% | 5.70 kHz |
| Control Method | THD | |||
|---|---|---|---|---|
| PULLA-MPC | 10.94% | 1.79 | 4.9 kHz | 3.219 |
| LVV-MPC | 19.85% | 2.66 | 3.4 kHz | 3.375 |
| Losses | LVV-MPC | PULLA-MPC |
|---|---|---|
| Stator copper losses (W) | 285.32 | 269.94 |
| VSC switching losses (W) | 7.92 | 11.07 |
| Total (W) | 293.24 | 281.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Duran, M.J.; Carrillo-Rios, J.; Aciego, J.J.; Salas-Biedma, P. Proportional Usage of Low-Level Actions in Model Predictive Control for Six-Phase Electric Drives. Energies 2021, 14, 4358. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144358
Gonzalez-Prieto A, Gonzalez-Prieto I, Duran MJ, Carrillo-Rios J, Aciego JJ, Salas-Biedma P. Proportional Usage of Low-Level Actions in Model Predictive Control for Six-Phase Electric Drives. Energies. 2021; 14(14):4358. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144358
Chicago/Turabian StyleGonzalez-Prieto, Angel, Ignacio Gonzalez-Prieto, Mario J. Duran, Juan Carrillo-Rios, Juan J. Aciego, and Pedro Salas-Biedma. 2021. "Proportional Usage of Low-Level Actions in Model Predictive Control for Six-Phase Electric Drives" Energies 14, no. 14: 4358. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144358