Modeling and Dynamic Simulation of a Hybrid Liquid Desiccant System with Non-Adiabatic Falling-Film Air-Solution Contactors for Air Conditioning Applications in Buildings




Abstract
:1. Introduction
- Lower air-pressure drops.
- Lower liquid desiccant flow rates are needed to achieve the same dehumidification/regeneration because the liquid desiccant temperature is kept almost constant along with the air-solution contactor. This previous advantage leads to higher LDS COP and lowers carryover of liquid desiccant.
2. Materials and Methods
2.1. Description of the HLDS
2.2. Modeling of the HLDS
2.2.1. Modeling of the Air-Solution Contactors
2.2.2. Modeling of the Liquid Desiccant Tanks
2.2.3. Modeling of Other Components
2.2.4. Modeling of the Control Strategy
- Type2d, which is a generic differential on/off controller. This component was used to start/stop the regeneration process as a function of the LiCl mass fraction at the inlet of the absorber with a dead hysteresis band of 2.5%.
- Type2b, which is a temperature differential on/off controller. This component was used to set the operational mode of the system—that is, heating or cooling—as a function of the room temperature with a dead hysteresis band of 2 °C.
- To set the airflow rate as a function of the room set-point temperature (25 °C).
- To set the water flow rate at the inlet of the absorber as a function of the room set-point humidity ratio (0.010 kgw/kgda).
- To set the water flow rate at the inlet of the cooling/heating coil as a function of the supply air set-point temperature (19 °C in summer conditions and 31 °C in winter conditions).
2.2.5. Modeling of the Ambient Conditions
2.2.6. Modeling of the Internal Loads
3. Results
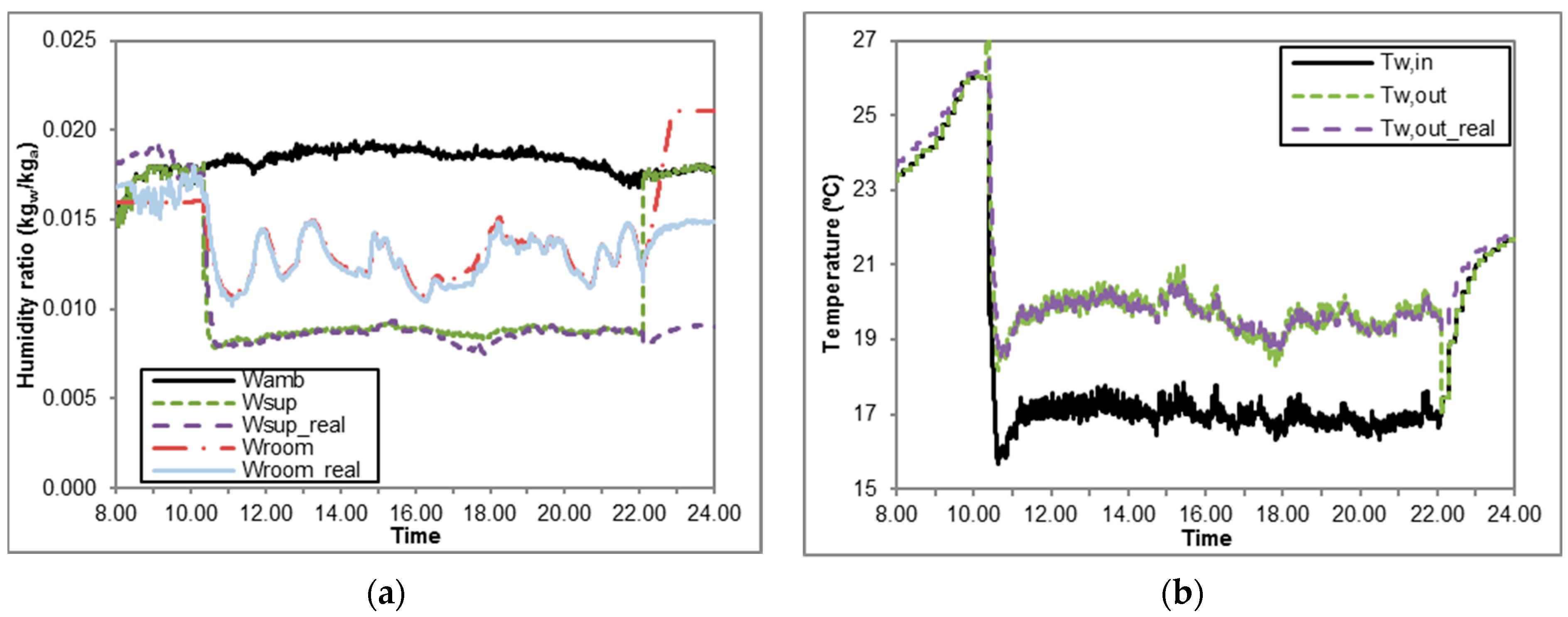
3.1. Validation of the Model
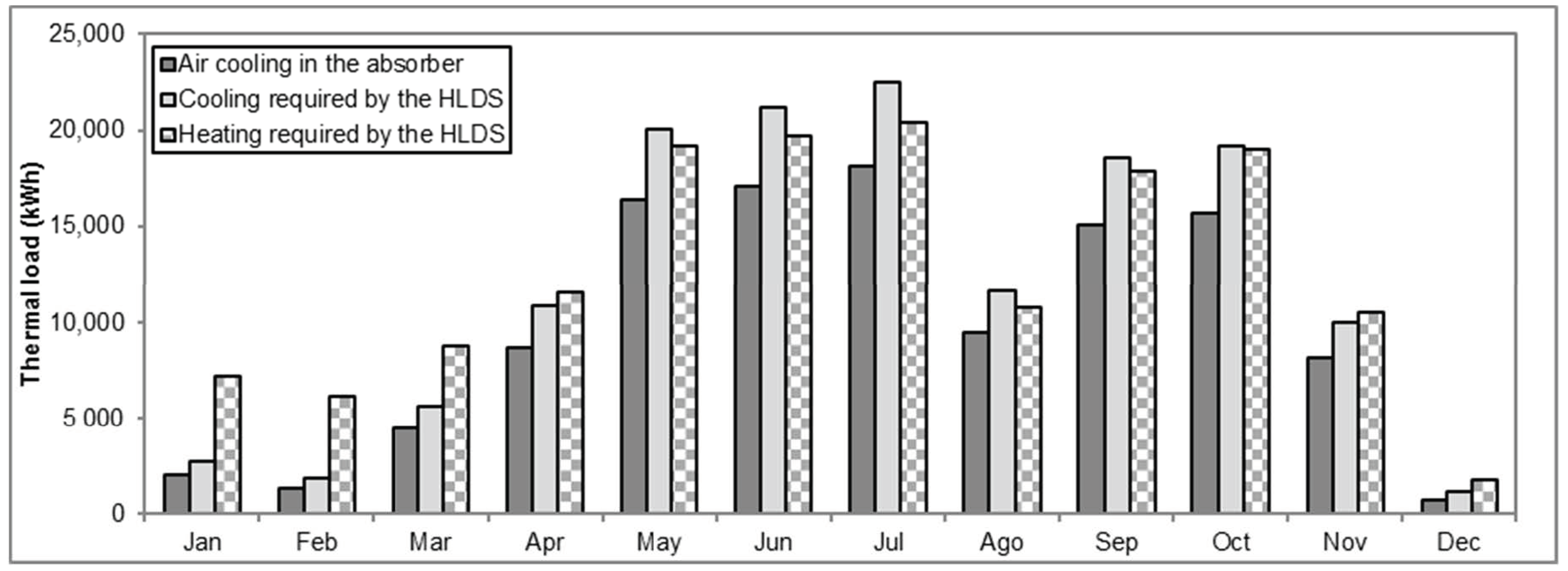
3.2. Sensitivity Analysis
- The heating required by the HLDS, which is the annual heating needed in the regenerator and the heating coil.
- The cooling required by the HLDS is the annual cooling needed in the absorber and the cooling coil.
- The air cooling (sensible + latent) in the absorber.
- The number of hours in discomfort conditions.
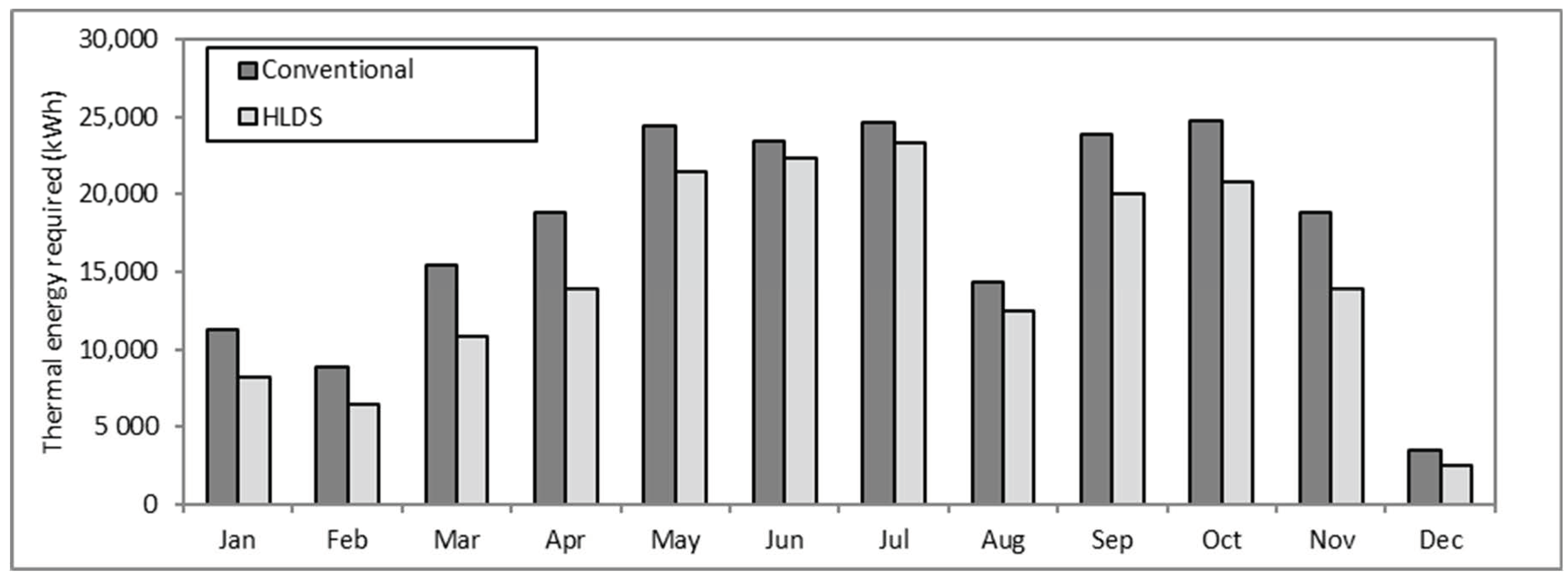
3.3. Optimization and Annual Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| A | Air-solution contact surface (m2) |
| cp | Specific heat capacity (kJ·kg−1·°C−1) |
| d | Tube diameter (m) |
| Ex | Exergy (kW) |
| Gz | Graetz number (-), Gz = di·Pr·Re·L−1 |
| h | Specific enthalpy (kJ·kg−1) |
| hWA | Partial enthalpy of water in air (kJ·kg−1·°C−1) |
| hWS | Partial enthalpy of water in solution (kJ·kg−1·°C−1) |
| Le | Lewis number (-), Le = α·σ−1·cp−1 |
| Mass flow rate (kg·s−1) | |
| M | Mass (kg) |
| n | Constant (-) |
| Nu | Nusselt number (-) |
| p | Pressure (kPa) |
| Pr | Prandtl number (-), Pr = cp·µ·λ−1 |
| R | Thermal resistance (m2·°C·kW−1) |
| Re | Reynolds number (-), Re = v·di·ν−1 |
| T | Temperature (°C) |
| U | Overall heat transfer coefficient (kW·°C−1·m−2) |
| v | Velocity (m·s−1) |
| W | Humidity ratio (kgw·kga−1) |
| X | Lithium chloride mass fraction (%) |
| Greeks | |
| α | Convective heat transfer coefficient (kW·m−2·°C−1) |
| β | Solution-interface mass transfer coefficient (kg·m−2·s−1) |
| ε | Friction coefficient of tube (-) |
| λ | Thermal conductivity (kW·m−1·°C−1) |
| σ | Air-interface mass transfer coefficient (kg·m−2·s−1) |
| η | Efficiency (-) |
| µ | Dynamic viscosity (N·s·m−2) |
| ν | Kinematic viscosity (m2·s−1) |
| Subscripts | |
| a | Air |
| abs | Absorber |
| amb | Ambient conditions |
| b | Bottom |
| ccoil | Cooling coil |
| da | Dry air |
| i | Internal |
| in | Inlet |
| o | External |
| out | Outlet |
| real | Real values from measurements |
| reg | Regenerator |
| room | Room conditions |
| s | Solution film |
| sup | Supply conditions |
| t | Top |
| w | Water |
References
- Mei, L.; Dai, Y.J. A technical review on use of liquid-desiccant dehumidification for air-conditioning application. Renew. Sustain. Energy Rev. 2008, 12, 662–689. [Google Scholar] [CrossRef]
- Khan, A.Y.; Sulsona, F.J. Modelling and parametric analysis of heat and mass transfer performance of refrigerant cooled liquid desiccant absorbers. Int. J. Energy Res. 1998, 22, 813–832. [Google Scholar] [CrossRef]
- Mohammad, A.T.; Bin Mat, S.; Sulaima, M.Y.; Sopian, K.; Al-Abidi, A.A. Survey of liquid desiccant dehumidification system based on integrated vapor compression technology for building applications. Energy Build. 2013, 62, 1–14. [Google Scholar] [CrossRef]
- Misha, S.; Mat, S.; Ruslan, M.H.; Sopian, K. Review of solid/liquid desiccant in the drying applications and its regeneration methods. Renew. Sustain. Energy Rev. 2012, 16, 4686–4707. [Google Scholar] [CrossRef]
- Öberg, V.; Goswami, D. A review of liquid desiccant cooling. Adv. Sol. Energy 1998, 12, 431–470. [Google Scholar]
- Prieto, J. Theoretical and Experimental Study of a Dehumidification System Based on Liquid Desiccants for Air Conditioning Applications. Ph.D. Thesis, Universitat Rovira I Virgili, Tarragona, Spain, June 2016. [Google Scholar]
- Mohammad, A.T.; Bin Mat, S.; Sulaiman, M.Y.; Sopian, K.; Al-Abidi, A.A. Survey of hybrid liquid desiccant air conditioning systems. Renew. Sustain. Energy Rev. 2013, 20, 186–200. [Google Scholar] [CrossRef]
- Kathabar Systems. Available online: https://www.kathabar.com/liquid-desiccant/liquid-literature (accessed on 21 December 2020).
- Dyna Air Co., Ltd. Dyna-Air Dryer System. Available online: http://www.dyna-air.jp (accessed on 21 December 2020).
- Advantix Systems. Available online: http://www.advantixsystems.cn/wdf/ban.html (accessed on 21 December 2020).
- Lowenstein, A. Review of Liquid Desiccant technology for HVAC Applications. HVAC R Res. 2008, 14, 819–839. [Google Scholar] [CrossRef]
- Yin, Y.; Zhang, X.; Peng, D.; Li, X. Model validation and case study on internally cooled/heated dehumidifier/regenerator of liquid desiccant systems. Int. J. Therm. Sci. 2009, 48, 1664–1671. [Google Scholar] [CrossRef]
- Gommed, K.; Grossman, G.; Prieto, J.; Ortig, J.; Coronas, A. Experimental comparison between internally and externally cooled air-solution contactors. Sci. Technol. Built Environ. 2015, 21, 267–274. [Google Scholar] [CrossRef]
- Prieto, J.; Ortiga, J.; Coronas, A. Experimental performance of polymeric air-solution contactors for liquid desiccant systems. Appl. Therm. Eng. 2017, 121, 576–584. [Google Scholar] [CrossRef]
- Chung, T.W.; Wu, H. Comparison between spray towers with and without fin coils for air dehumidification using triethylen glycol solutions and development on the mass-transfer correlations. Ind. Eng. Chem. Res. 2000, 39, 2076–2084. [Google Scholar] [CrossRef]
- Kessling, W.; Lävemann, E.; Kapfhammer, C. Energy storage for desiccant cooling systems component development. Sol. Energy 1998, 64, 209–221. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, T.; Liu, X.; Jiang, J. Experimental analysis of an internally-cooled/heated liquid desiccant dehumidifier/regenerator made of thermally conductive plastic. Energy Build. 2015, 99, 75–86. [Google Scholar] [CrossRef]
- Lävemann, E.; Peltzer, M. Distributor for Micro-Quantities of Liquid. U.S. Patent Application No. 7021608, 2006. [Google Scholar]
- Lowenstein, A.; Slayzak, S.; Kozubal, E. A zero carryover liquid-desiccant air conditioner for solar applications. In Proceedings of the ASME Solar 06, Denver, CO, USA, 13–18 July 2006; pp. 1–11. [Google Scholar] [CrossRef] [Green Version]
- Fina, A.; Guerriero, A.; Colonna, S.; Carosio, F.; Saracco, G. Polymer-based materials for the application in Liquid Dessicant heat exchangers. In V Congreso Iberoamericano de Ciencias y Técnicas del Frío; Universitat Jaume I-Empresa: Tarragona, Spain, 2014. [Google Scholar]
- Ahmed, C.S.K.; Gandhidasan, P.; Al-Farayedhi, A. Simulation of a hybrid liquid desiccant based air-conditioning system. Appl. Therm. Eng. 1997, 17, 125–134. [Google Scholar] [CrossRef]
- Ham, S.-W.; Lee, S.-J.; Jeong, J.-W. Operating energy savings in a liquid desiccant and dew point evaporative cooling-assisted 100% outdoor air system. Energy Build 2016, 116, 535–552. [Google Scholar] [CrossRef]
- Yamaguchi, S.; Jeong, J.; Saito, K.; Miyauchi, H.; Harada, M. Hybrid liquid desiccant air-conditioning system: Experiments and simulations. Appl. Therm. Eng. 2011, 31, 3741–3747. [Google Scholar] [CrossRef]
- Coca-Ortegón, A.; Prieto, J.; Coronas, A. Modelling and dynamic simulation of a hybrid liquid desiccant system regenerated with solar energy. Appl. Therm. Eng. 2016, 97, 109–117. [Google Scholar] [CrossRef]
- Li, X.; Liu, S.; Tan, K.K.; Wang, Q.-G.; Cai, W.-J.; Xie, L. Dynamic modeling of a liquid desiccant dehumidifier. Appl. Energy 2016, 180, 435–445. [Google Scholar] [CrossRef]
- Wang, X.; Cai, W.; Yin, X. A global optimized operation strategy for energy savings in liquid desiccant air conditioning using self-adaptive differential evolutionary algorithm. Appl. Energy 2017, 187, 410–423. [Google Scholar] [CrossRef]
- Wu, Q.; Cai, W.; Shen, S.; Wang, X.; Ren, H. A regulation strategy of working concentration in the dehumidifier of liquid desiccant air conditioner. Appl. Energy 2017, 202, 648–661. [Google Scholar] [CrossRef]
- Wang, X.; Cai, W.; Lu, J.; Sun, Y.; Ding, X. A hybrid dehumidifier model for real-time performance monitoring, control and optimization in liquid desiccant dehumidification system. Appl. Energy 2013, 111, 449–455. [Google Scholar] [CrossRef]
- Wang, L.; Xiao, F.; Niu, X.; Gao, D. A dynamic dehumidifier model for simulations and control of liquid desiccant hybrid air conditioning systems. Energy Build. 2017, 140, 418–429. [Google Scholar] [CrossRef]
- Liu, X.; Xie, Y.; Zhang, T.; Chen, L.; Cong, L. Experimental investigation of a counter-flow heat pump driven liquid desiccant dehumidification system. Energy Build. 2018, 179, 223–238. [Google Scholar] [CrossRef]
- TRNSYS. Transient System Simulation Tool, Program Manual; Solar Energy Labratory, University of Wisconsin: Madison, WI, USA, 2004. [Google Scholar]
- TESS. Component Libraries General Descriptions; Thermal Energy System Specialists: Madison, WI, USA, 2014; pp. 1–76. [Google Scholar]
- Mohammad, A.T.; Mat, S.B.; Sopian, K.; Al-abidi, A.A. Review: Survey of the control strategy of liquid desiccant systems. Renew. Sustain. Energy Rev. 2016, 58, 250–258. [Google Scholar] [CrossRef]
- Hellmann, H.M.; Grossman, G. Simulation and analysis of an open-cycle dehumidifier-evaporator-regenerator (DER) absorption chiller for low-grade heat utilization. Int. J. Refrig. 1995, 18, 177–189. [Google Scholar] [CrossRef]
- Conde, M.R. Properties of aqueous solutions of lithium and calcium chlorides: Formulations for use in air conditioning equipment design. Int. J. Therm. Sci. 2004, 43, 367–382. [Google Scholar] [CrossRef]
- Electrical Research Association. Thermodynamic Properties of Water and Steam; Viscosity of Water and Steam, Thermal Conductivity of Water and Steam; Edward Arnold Publishers: London, UK, 1967. [Google Scholar]
- Nellis, S.; Klein, G. Heat Transfer; Cambridge University Press: New York, NY, USA, 2009. [Google Scholar]
- ANSI/ASHRAE. Standard 55; Shaping Tomorrow’s Built Environment Today: Peachtree Corners, GA, USA, 2010; pp. 3–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water mass balance | (1) | |
| Desiccant material mass balance | (2) | |
| Energy balance | (3) | |
| Air-solution interface mass balance at the top | (4) | |
| Interface mass balance at the bottom | (5) | |
| Interface energy balance at the top | (6) | |
| Interface energy balance at the bottom | (7) | |
| Water vapor pressure equilibrium at the top | (8) | |
| Water vapor pressure equilibrium at the bottom | (9) | |
| Tube-solution heat transfer equation | (10) | |
| Air-solution mass transfer equation | - | (11) |
| Air-solution heat transfer equation | - | (12) |
| Tube Material | Polypropylene Tubes with Plasma Surface Treatment [14] |
|---|---|
| Contact surface (m2) | 59.29 |
| Tube thermal conductivity (W·(m·°C)−1) | 0.21 |
| Tube length (m) | 0.68 |
| Bundle width (m) | 0.90 |
| Inside tube diameter (mm) | 5.10 |
| Outside tube diameter (mm) | 6.50 |
| Parameter | Value |
|---|---|
| Initial mass (kg) | 200 |
| Initial LiCl mass fraction (%) | 35% |
| Initial temperature (°C) | 25 |
| Specific heat of the solution (kJ·(kg·°C)−1) [35] | 2.71 |
| Overall heat transfer coefficient (kW·°C−1) | 0.021 |
| Parameter | Solution Heat Exchanger | Air–Air Heat Exchanger | Cooling/Heating Coil |
|---|---|---|---|
| Cold side specific heat (kJ·(kg·°C)−1) | 2.72 | 1.02 | 4.19 |
| Hot side specific heat (kJ·(kg·°C)−1) | 2.66 | 1.02 | 1.02 |
| Effectiveness (-) | 0.83 | 0.67 | - |
| Overall heat transfer coefficient (kW·°C−1) | - | - | 1.00 |
| Statistical Parameter | Wsup (kgw·kgda−1) | Wroom (kgw·kgda−1) | Tsup (°C) | Troom (°C) | Tw,out,abs (°C) | Tw,out,reg (°C) |
|---|---|---|---|---|---|---|
| Standard deviation | 0.0004 | 0.0003 | 0.3 | 0.3 | 0.2 | 0.1 |
| Average calculated | 0.0088 | 0.0129 | 20.6 | 25.6 | 19.7 | 49.3 |
| Average measured | 0.0086 | 0.0127 | 21.2 | 25.9 | 19.7 | 49.5 |
| Absorber | Regenerator | Cooling Coil | Heating Coil | |
|---|---|---|---|---|
| Energy transferred difference (%) | 4.9 | 9.9 | 11.1 | 5.2 |
| Annual Result | Value |
|---|---|
| Heating required by the HLDS (kW·h) | 152,950 |
| Cooling required by the HLDS (kW·h) | 145,462 |
| Total number of hours in discomfort conditions | 262.6 |
| Air cooling provided in the absorber (kW·h) | 117,370 |
| Parameter | Value |
|---|---|
| Cooling coil bypass factor (-) | 0.08 |
| Supply chilled water temperature (°C) | 7.0 |
| Return chilled water temperature (°C) | 12.0 |
| Parameter | Value |
|---|---|
| Ambient air temperature (°C) | 31.0 |
| Ambient air humidity ratio (kgw/kgda) | 0.0190 |
| Air flow rate (kg/s) | 0.875 |
| Supply air temperature (°C) | 17.73 |
| Supply air humidity ratio (kgw/kgda) | 0.0084 |
| Room air temperature (°C) | 26.0 |
| Room air humidity ratio (kgw/kgda) | 0.0110 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prieto, J.; Atienza-Márquez, A.; Coronas, A. Modeling and Dynamic Simulation of a Hybrid Liquid Desiccant System with Non-Adiabatic Falling-Film Air-Solution Contactors for Air Conditioning Applications in Buildings. Energies 2021, 14, 505. https://0-doi-org.brum.beds.ac.uk/10.3390/en14020505
Prieto J, Atienza-Márquez A, Coronas A. Modeling and Dynamic Simulation of a Hybrid Liquid Desiccant System with Non-Adiabatic Falling-Film Air-Solution Contactors for Air Conditioning Applications in Buildings. Energies. 2021; 14(2):505. https://0-doi-org.brum.beds.ac.uk/10.3390/en14020505
Chicago/Turabian StylePrieto, Juan, Antonio Atienza-Márquez, and Alberto Coronas. 2021. "Modeling and Dynamic Simulation of a Hybrid Liquid Desiccant System with Non-Adiabatic Falling-Film Air-Solution Contactors for Air Conditioning Applications in Buildings" Energies 14, no. 2: 505. https://0-doi-org.brum.beds.ac.uk/10.3390/en14020505