
Real-Time Emission Prediction with Detailed Chemistry under Transient Conditions for Hardware-in-the-Loop Simulations

 , , , and
, , , and
Abstract
:
1. Introduction
1.1. Motivation for HiL-Based Simulations
1.2. Challenges in Virtual ECU Calibration
2. Real-Time Powertrain Models
2.1. Reference Powertrain, Vehicle, and Fuel
2.2. Engine Air Path and Powertrain Modeling
2.3. Stochastic Reactor Model with Tabulated Chemistry for Real-Time Emissions Prediction
3. Model Parametrization and Simulation Environment
3.1. Co-Simulation Framework Setup
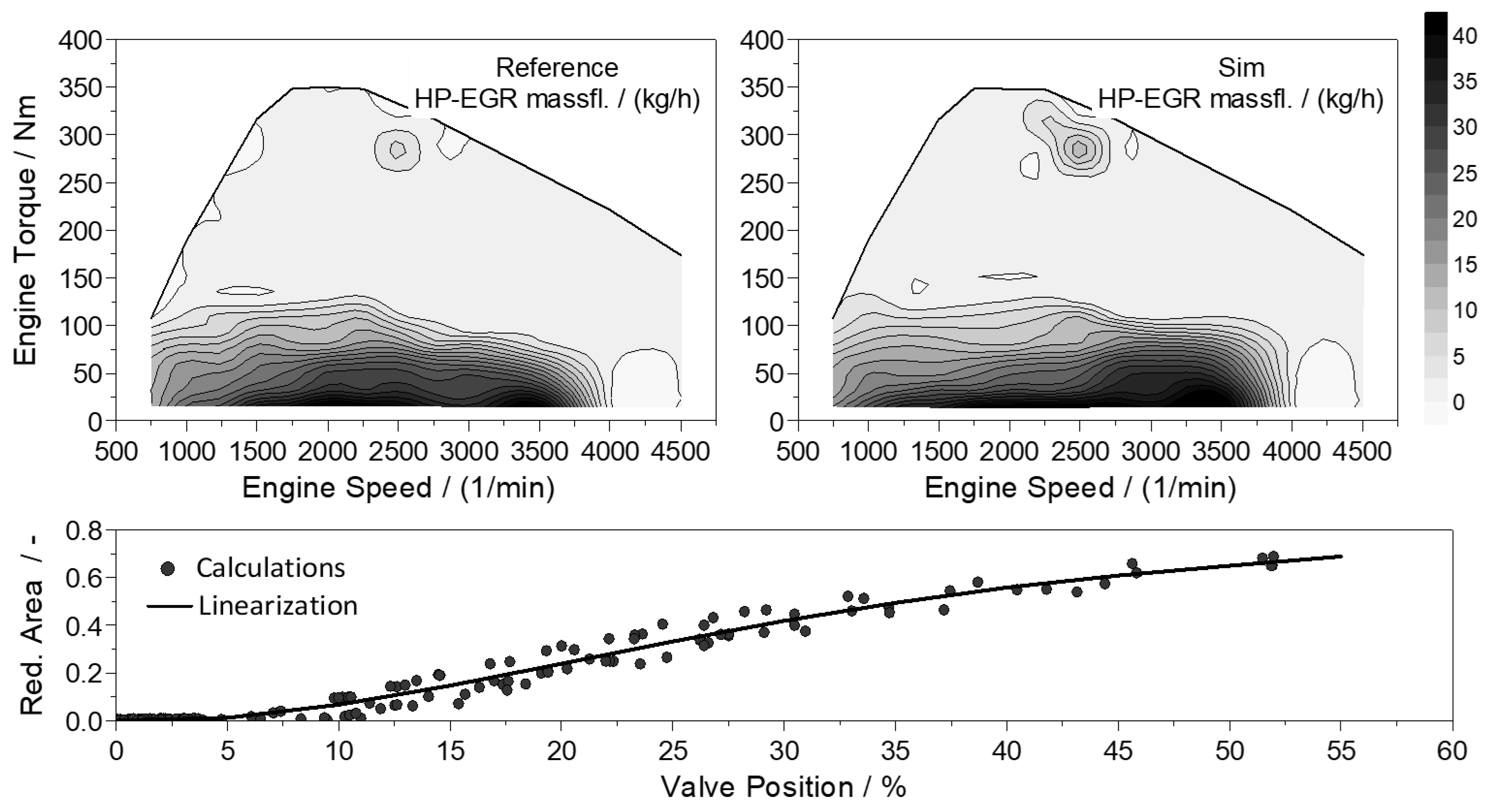
3.1.1. Engine Air Path Model Calibration
- Engine mapping without EGR in warm conditions (Coolant temperature of 90 °C);
- Engine mapping with EGR in warm conditions (Coolant temperature of 90 °C);
- Full load curve in warm conditions (Coolant temperature of 90 °C).
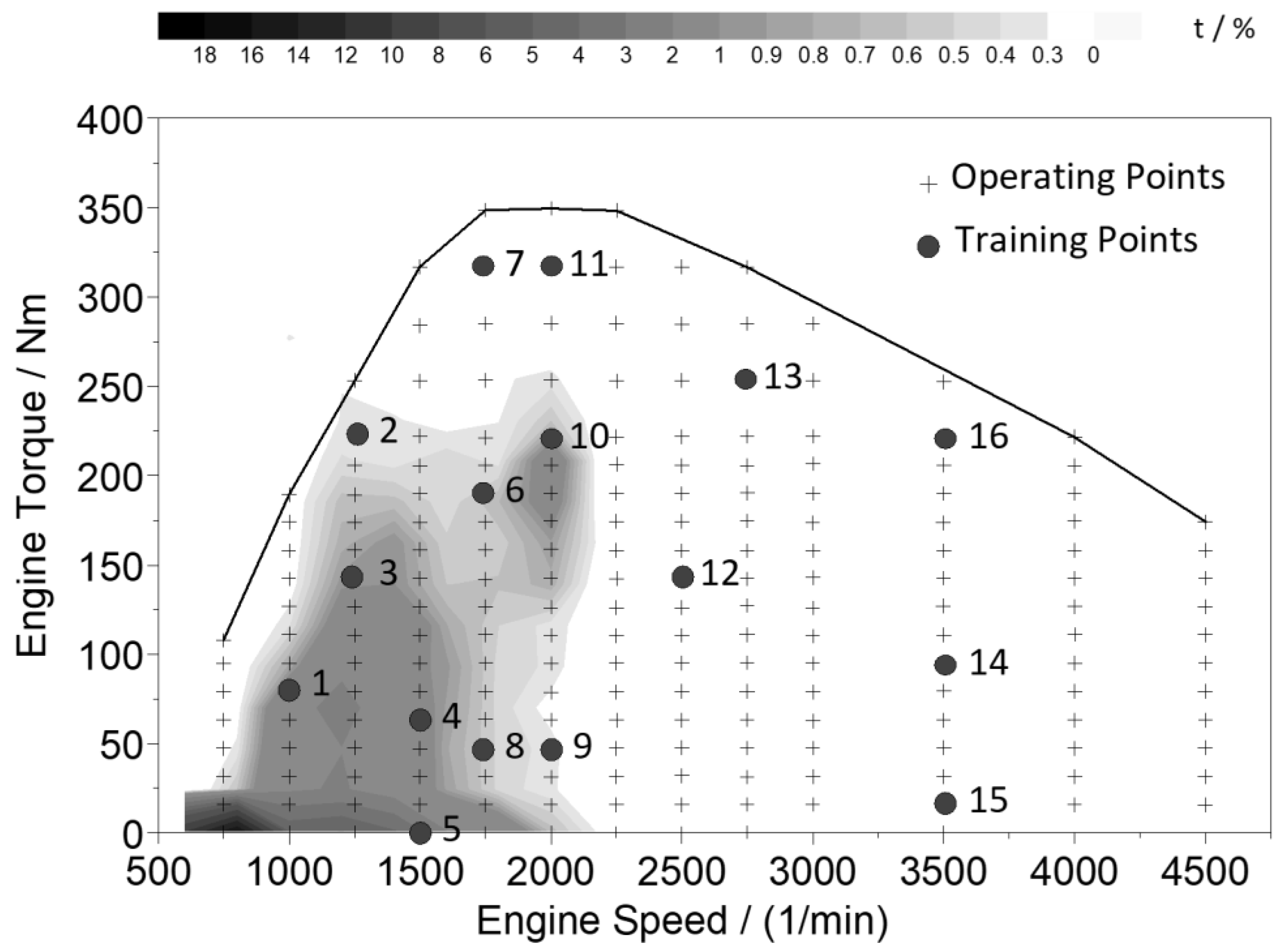
3.1.2. Combustion Model Parametrization
3.1.3. Combustion Model Interface
3.2. FMU for HiL-Based Applications
4. Performance Evaluation
4.1. Steady-State Simulation
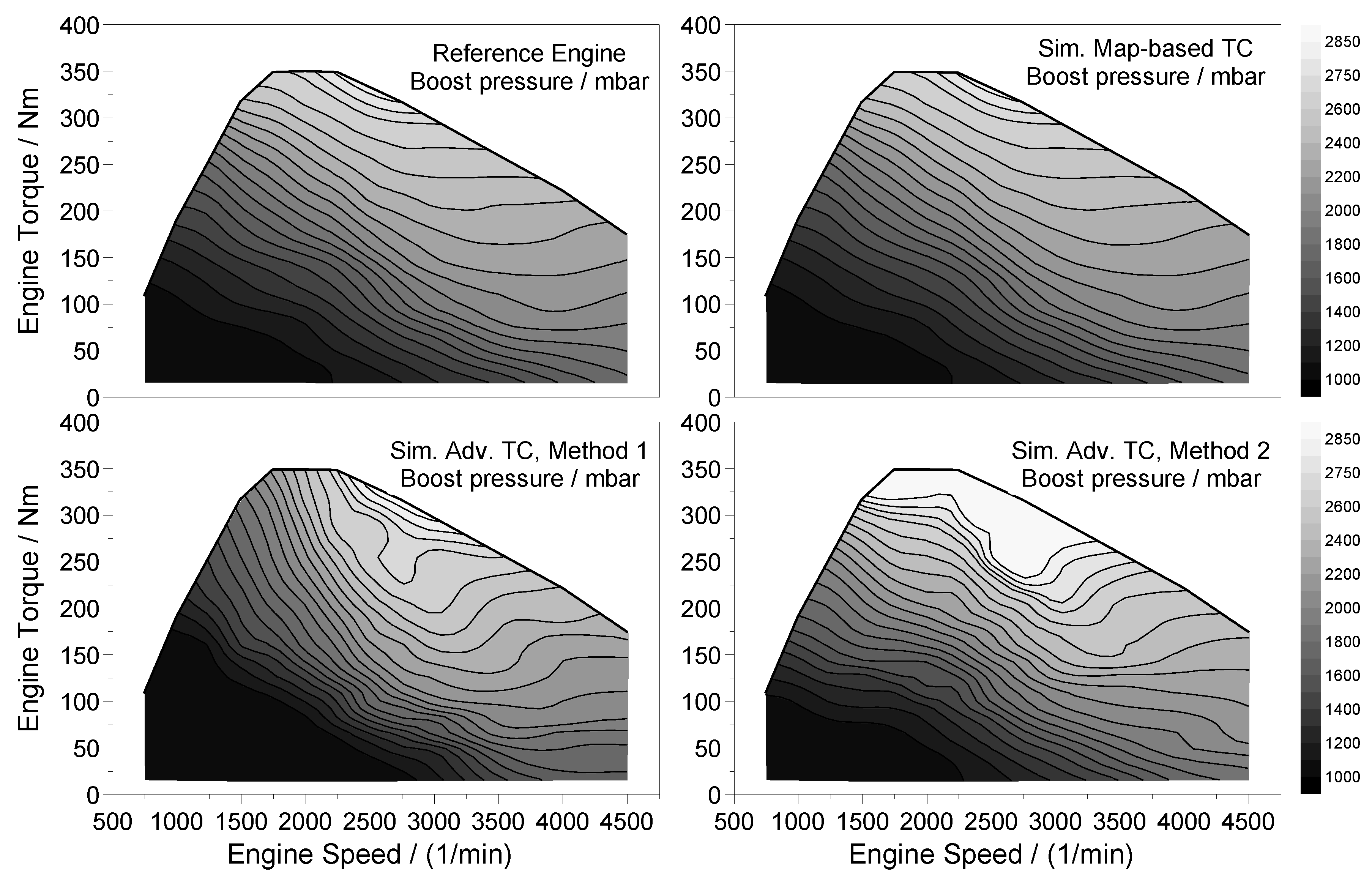
4.1.1. Engine Air Path Model Validation
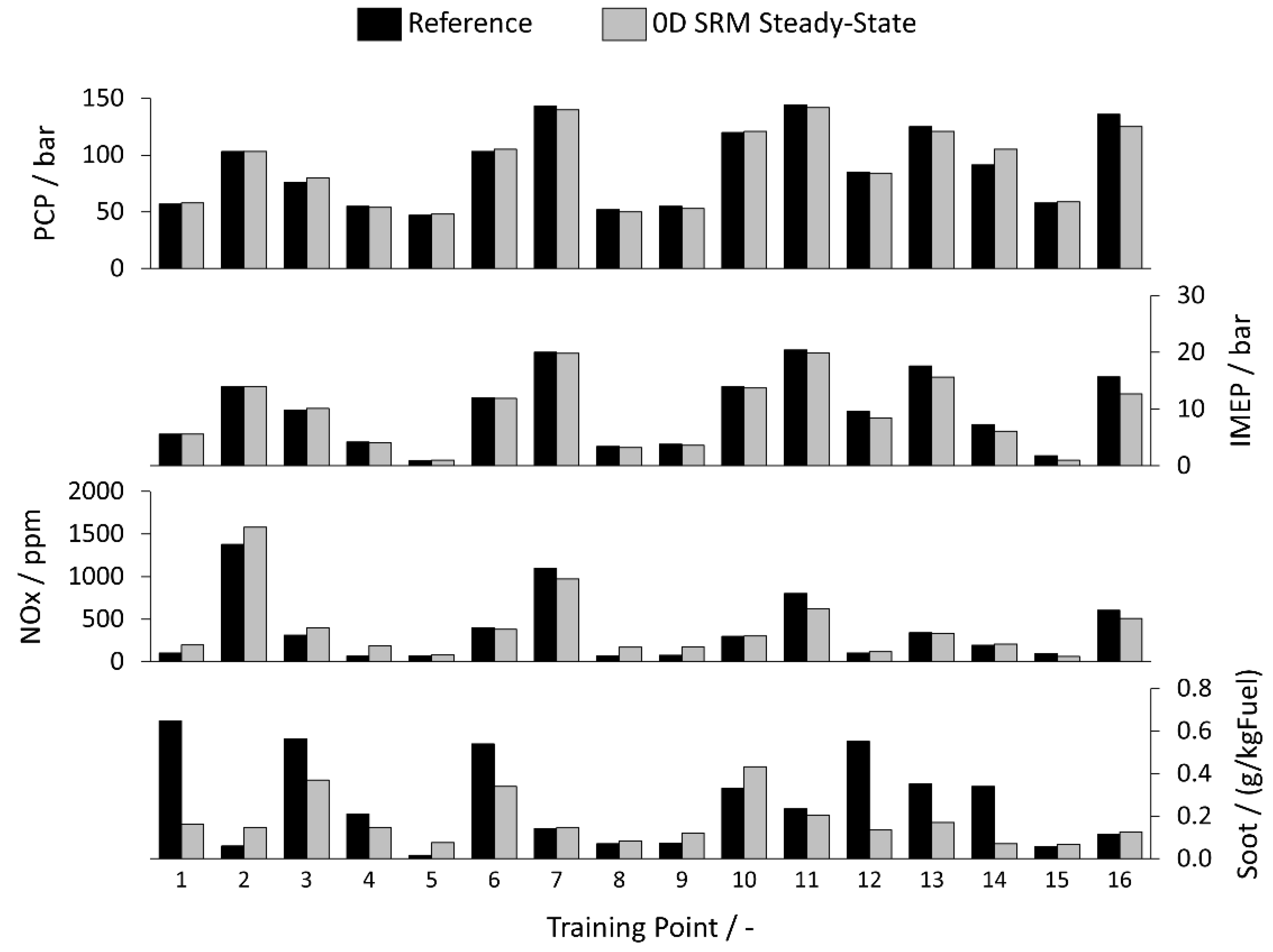
4.1.2. In-Cylinder Combustion Model Optimization Results
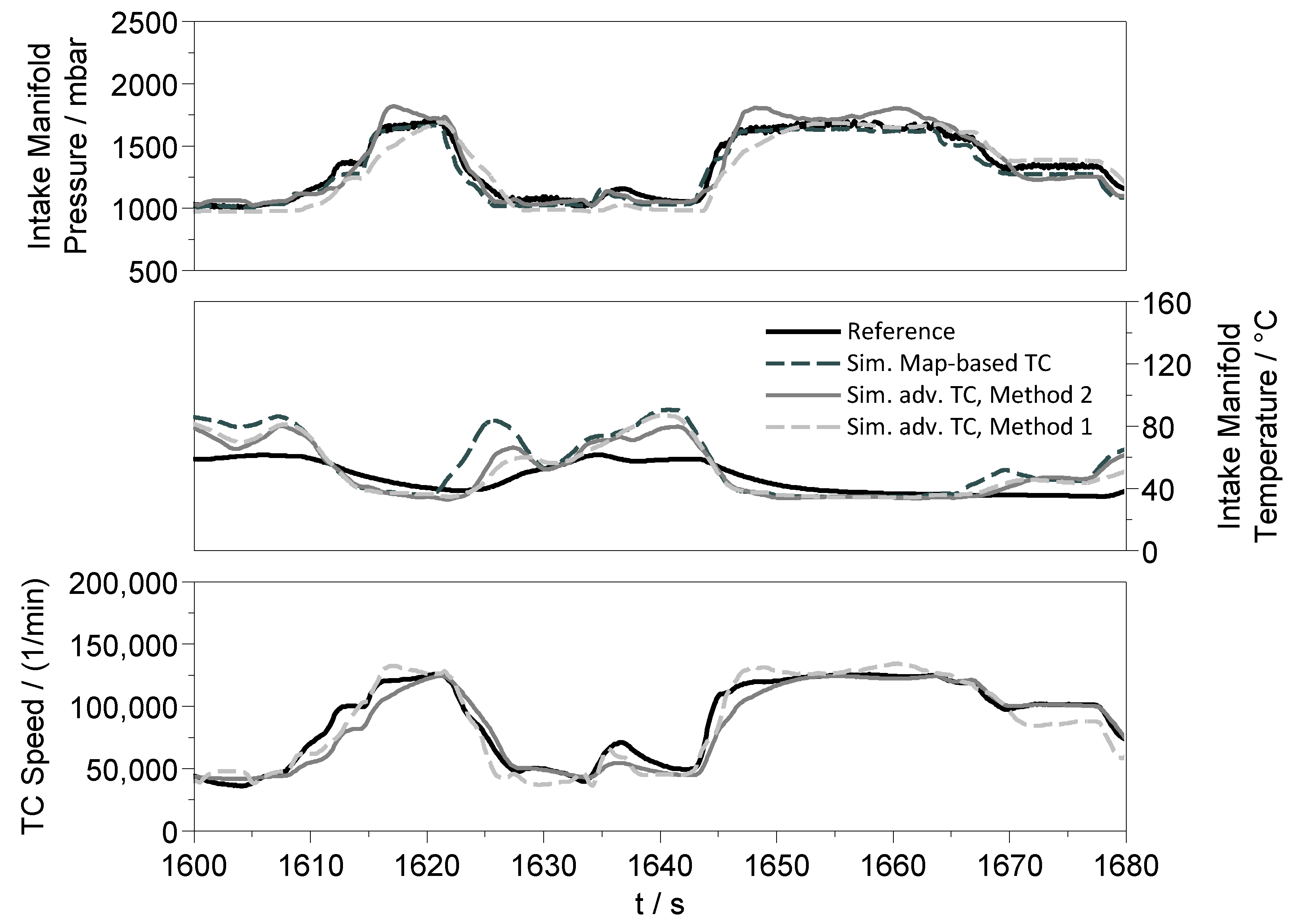
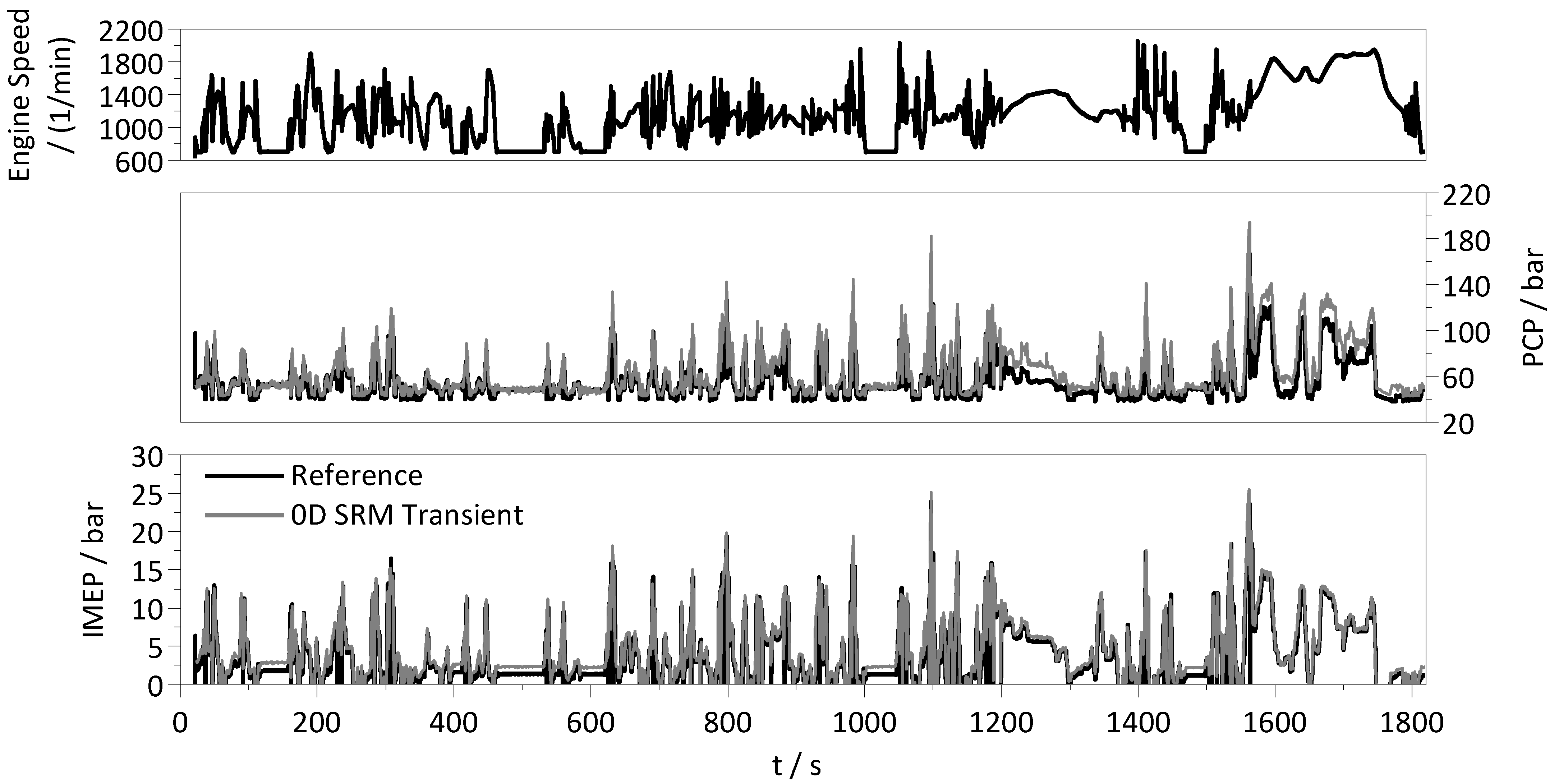
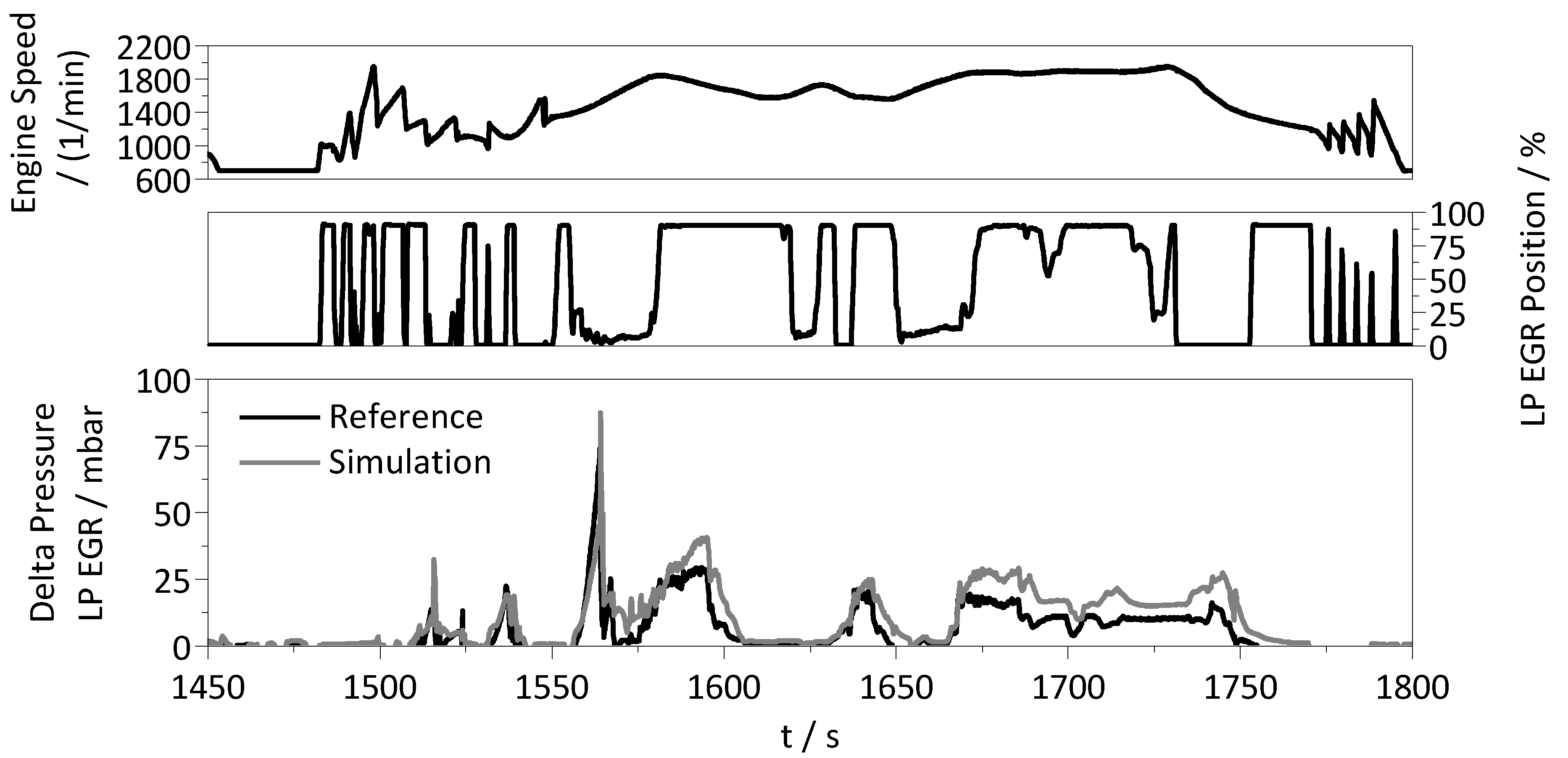
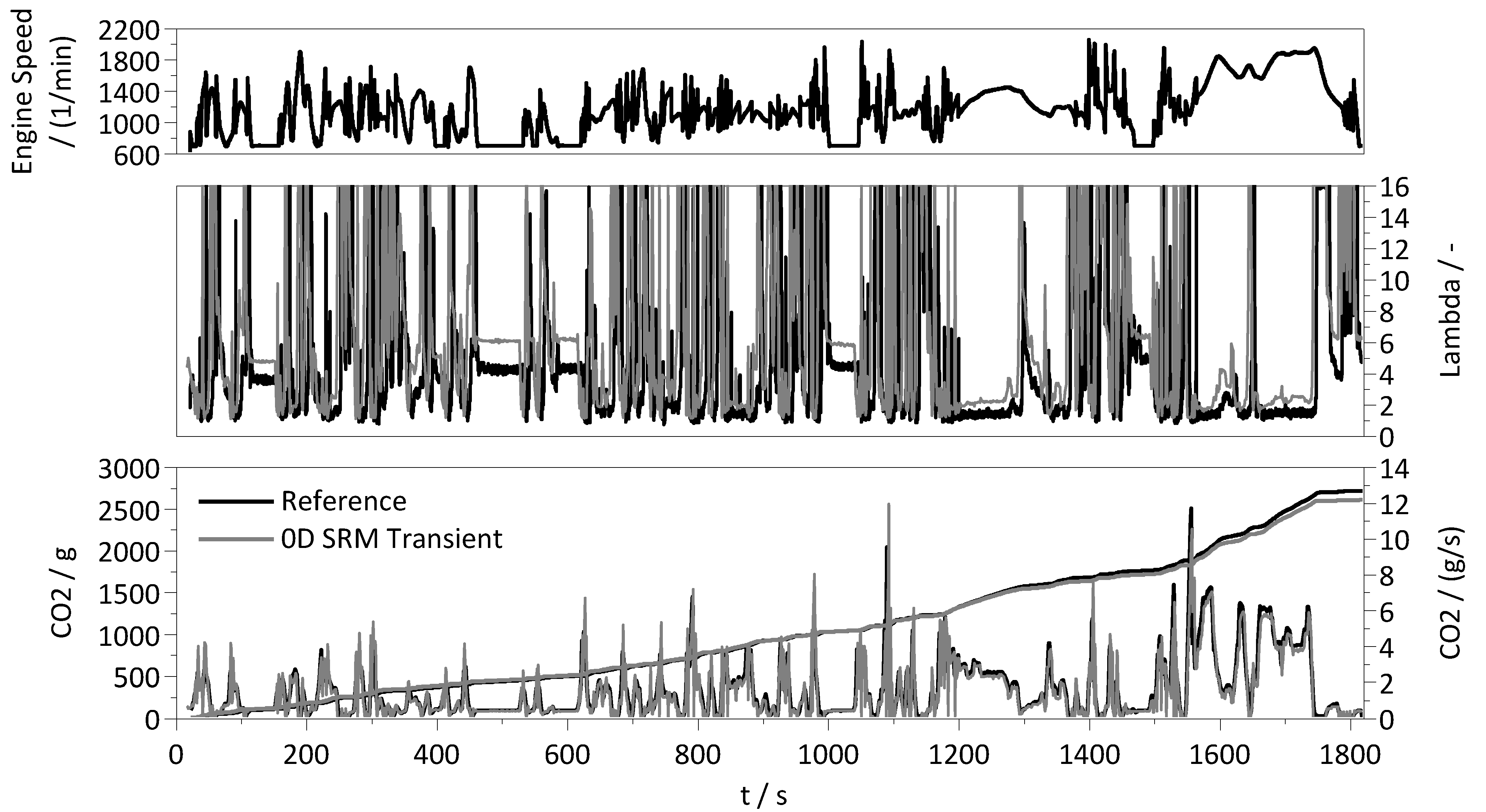
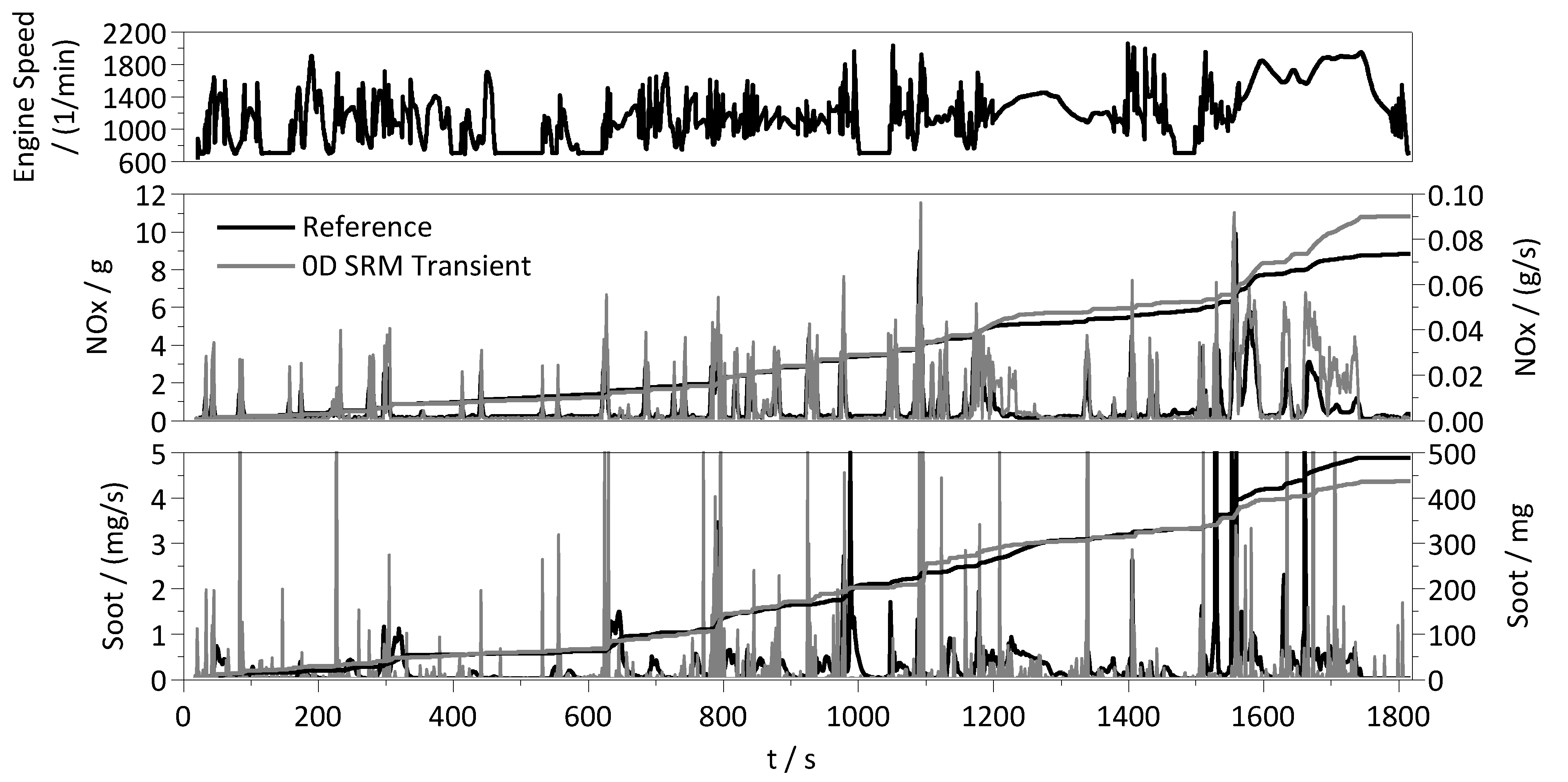
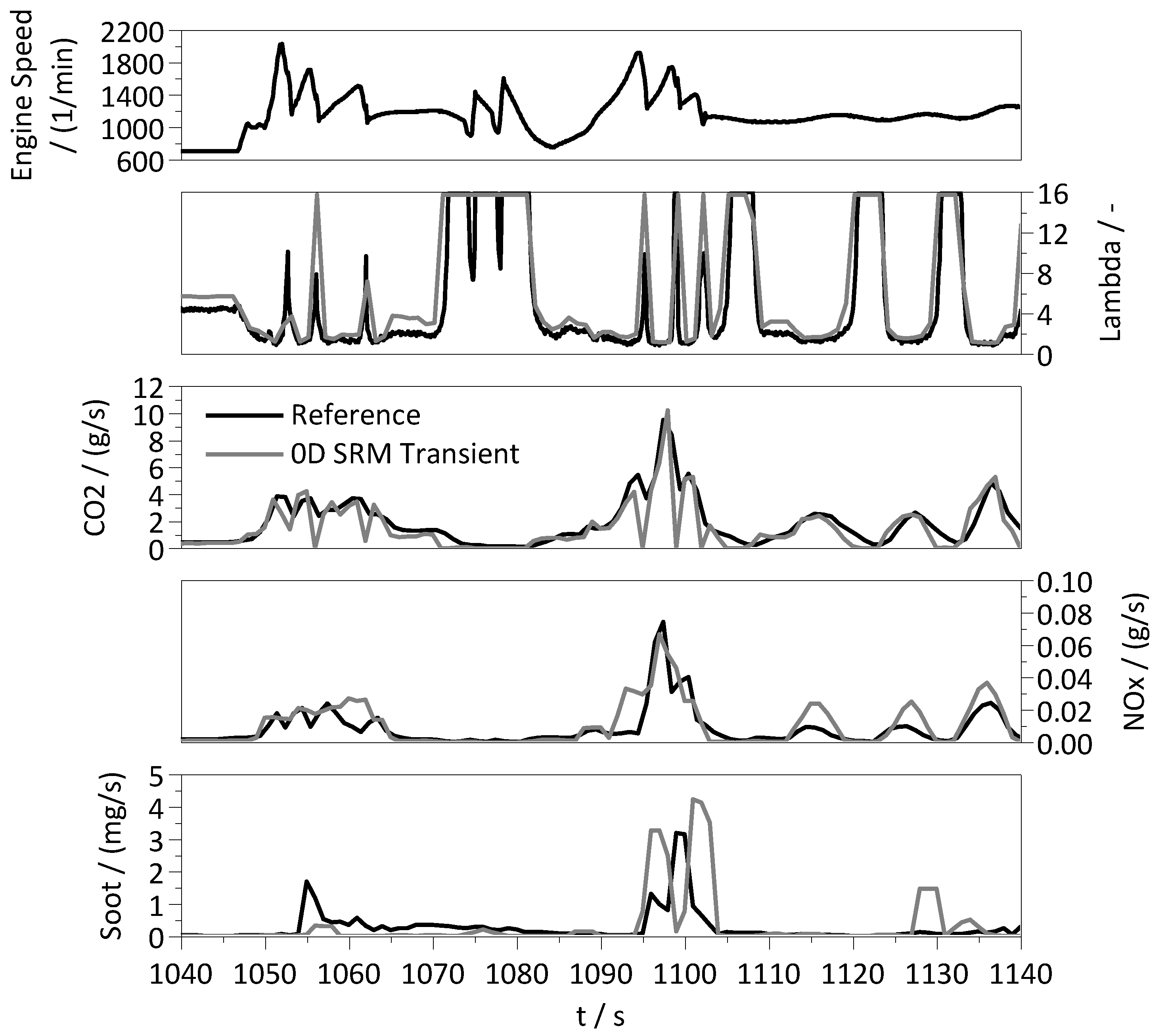
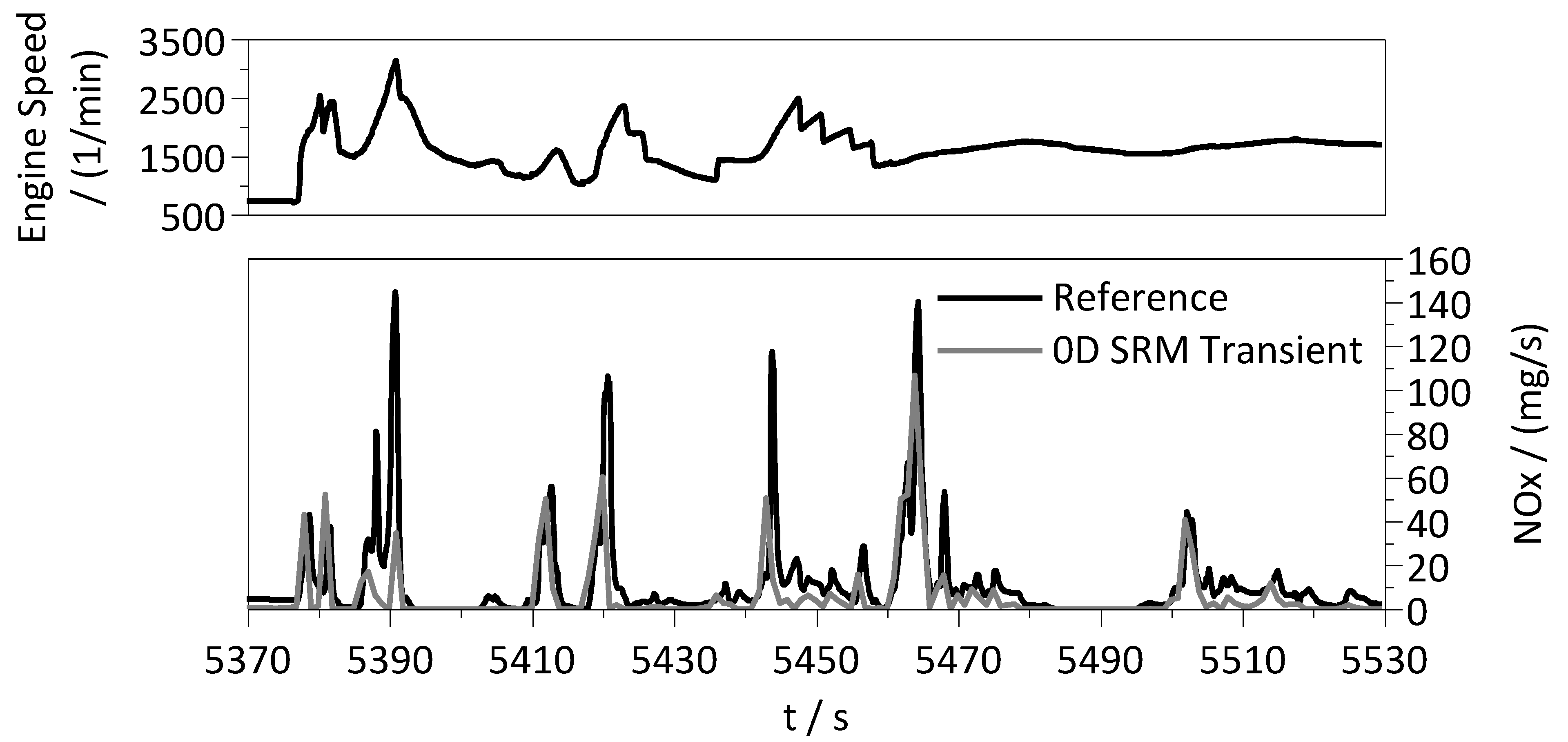
4.2. Transient Simulation
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Samaras, Z. Preliminary Findings on Possible Euro 7 Emission Limits for Passenger Cars and LCVs: Online AGVES Meeting. Available online: https://circabc.europa.eu/sd/a/fdd70a2d-b50a-4d0b-a92a-e64d41d0e947/CLOVE%20test%20limits%20AGVES%202020-10-27%20final%20vs2.pdf (accessed on 15 January 2021).
- Samaras, Z. LDV Exhaust: Online AGVES Meeting. Available online: https://www.heise.de/downloads/18/3/0/8/5/7/1/4/AGVES-2021-04-08-LDV_Exhaust.pdf (accessed on 11 November 2021).
- Delphi Technologies. Worldwide Emissions Standards: Passenger Cars and Light Duty Vehicles. 2020. Available online: https://www.delphi.com/sites/default/files/2020-04/DELPHI%20booklet%20emission%20passenger%20cars%202020%20online%20complet.pdf (accessed on 11 November 2021).
- Conway, G.; Joshi, A.; Leach, F.; García, A.; Senecal, P.K. A review of current and future powertrain technologies and trends in 2020. Transp. Eng. 2021, 5, 100080. [Google Scholar] [CrossRef]
- Joshi, A. Review of Vehicle Engine Efficiency and Emissions. In SAE Technical Paper Series; WCX SAE World Congress Experience, APR. 21, 2020; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2020. [Google Scholar]
- Cosadia, I.; Silvestri, J.J.; Papadimitriou, I.; Maroteaux, D.; Obernesser, P. Traversing the V-Cycle with a Single Simulation—Application to the Renault 1.5 dCi Passenger Car Diesel Engine. In SAE Technical Paper Series; SAE 2013 World Congress & Exhibition, APR. 16, 2013; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2013. [Google Scholar]
- Klein, S.; Savelsberg, R.; Xia, F.; Guse, D.; Andert, J.; Blochwitz, T.; Bellanger, C.; Walter, S.; Beringer, S.; Jochheim, J.; et al. Engine in the Loop: Closed Loop Test Bench Control with Real-Time Simulation. SAE Int. J. Commer. Veh. 2017, 10, 95–105. [Google Scholar] [CrossRef]
- Roberts, P.J.; Mumby, R.; Mason, A.; Redford-Knight, L.; Kaur, P. RDE Plus—The Development of a Road, Rig and Engine-in-the-Loop Test Methodology for Real Driving Emissions Compliance. In SAE Technical Paper Series; WCX SAE World Congress Experience, APR. 09, 2019; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Andert, J.; Xia, F.; Klein, S.; Guse, D.; Savelsberg, R.; Tharmakulasingam, R.; Thewes, M.; Scharf, J. Road-to-rig-to-desktop: Virtual development using real-time engine modelling and powertrain co-simulation. Int. J. Engine Res. 2019, 20, 686–695. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.-Y.; Andert, J.; Quérel, C.; Schaub, J.; Kötter, M.; Politsch, D.; Hadj-amor, H. X-in-the-Loop-basierte Kalibrierung: HiL Simulation eines virtuellen Dieselantriebsstrangs. In Simulation und Test 2017; Liebl, J., Beidl, C., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 53–79. ISBN 978-3-658-20827-1. [Google Scholar]
- Kötter, M.; Lindemann, B.; Bergmann, D.; Ehrly, M.; Jung, T.; Nijs, M.; Thewes, S.; Körfer, T.; Trampert, S.; Drecq, T.; et al. Powertrain calibration based on X-in-theLoop: Virtualization in the vehicle development process. In 18. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wiedemann, J., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 1187–1201. ISBN 978-3-658-21193-6. [Google Scholar]
- Picerno, M.; Lee, S.-Y.; Ehrly, M.; Schaub, J.; Andert, J. Virtual Powertrain Simulation: X-in-the-Loop Methods for Concept and Software Development. In 21. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2021; pp. 531–545. ISBN 978-3-658-33465-9. [Google Scholar]
- Picerno, M.; Lee, S.-Y.; Schaub, J.; Ehrly, M.; Millo, F.; Scassa, M.; Andert, J. Co-Simulation of Multi-Domain Engine and its Integrated Control for Transient Driving Cycles. IFAC-PapersOnLine 2020, 53, 13982–13987. [Google Scholar] [CrossRef]
- Xia, F.; Lee, S.-Y.; Andert, J.; Kampmeier, A.; Scheel, T.; Ehrlylng, M.; Tharmakulasingam, R.; Takahashi, Y.; Kumagai, T. Crank-Angle Resolved Real-Time Engine Modelling: A Seamless Transfer from Concept Design to HiL Testing. SAE Int. J. Engines 2018, 11, 1385–1398. [Google Scholar] [CrossRef]
- Andric, J.; Schimmel, D.; Sediako, A.D.; Sjoblom, J.; Faghani, E. Development and Calibration of One Dimensional Engine Model for Hardware-In-The-Loop Applications. In SAE Technical Paper Series; WCX World Congress Experience, APR. 10, 2018; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar]
- Millo, F.; Di Lorenzo, G.; Servetto, E.; Capra, A.; Pettiti, M. Analysis of the Performance of a Turbocharged S.I. Engine under Transient Operating Conditions by Means of Fast Running Models. SAE Int. J. Engines 2013, 6, 968–978. [Google Scholar] [CrossRef]
- Xia, F.; Dorscheidt, F.; Lücke, S.; Andert, J.; Gardini, P.; Scheel, T.; Walter, V.; Tharmakulasingam, J.K.R.; Böhmer, M.; Nijs, M. Experimental Proof-of-Concept of HiL Based Virtual Calibration for a Gasoline Engine with a Three-Way-Catalyst. In SAE Technical Paper Series; 2019 JSAE/SAE Powertrains, Fuels and Lubricants, AUG. 26, 2019; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Piano, A.; Millo, F.; Boccardo, G.; Rafigh, M.; Gallone, A.; Rimondi, M. Assessment of the Predictive Capabilities of a Combustion Model for a Modern Common Rail Automotive Diesel Engine. In SAE Technical Paper Series; SAE 2016 World Congress and Exhibition, APR. 12, 2016; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2016. [Google Scholar]
- Boccardo, G.; Servetto, E.; Seebooa, A.; Sammut, G.; Primitivo, J.S. Development of a Real Time GT-Power xRT Model for Virtual Calibration: Online AGVES Meeting. Available online: https://www.gtisoft.com/wp-content/uploads/2020/11/Development-of-a-Real-Time-GT-POWER-xRT-Model-for-Virtual-Calibration-Giulio-Boccardo-Powertech-and-JLR.pdf (accessed on 8 October 2021).
- Gamma Technologies. GT-SUITE: Engine Performance Application Manual Version 2021. Available online: https://www.gtisoft.com/gt-suite-applications/propulsion-systems/real-time-engine/ (accessed on 19 November 2021).
- Lee, S.-Y.; Andert, J.; Pischinger, S.; Ehrly, M.; Schaub, J.; Koetter, M.; Ayhan, A.S. Scalable Mean Value Modeling for Real-Time Engine Simulations with Improved Consistency and Adaptability. In SAE Technical Paper Series; WCX SAE World Congress Experience, APR. 09, 2019; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Joerg, C.; Lee, S.-Y.; Reuber, C.; Schaub, J.; Koetter, M.; Thewes, S.; Thattaradiyil, R.; Andert, J. Accurate Mean Value Process Models for Model-Based Engine Control Concepts by Means of Hybrid Modeling. In SAE Technical Paper Series; WCX SAE World Congress Experience, APR. 09, 2019; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Dorscheidt, F.; Düzgün, M.; Claßen, J.; Krysmon, S.; Pischinger, S.; Görgen, M.; Dönitz, C.; Nijs, M. Hardware-in-the-Loop Based Virtual Emission Calibration for a Gasoline Engine. In SAE Technical Paper Series; SAE WCX Digital Summit, APR. 13, 2021; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2021. [Google Scholar]
- Lee, S.-Y.; Andert, J.; Neumann, D.; Querel, C.; Scheel, T.; Aktas, S.; Miccio, M.; Schaub, J.; Koetter, M.; Ehrly, M. Hardware-in-the-Loop-Based Virtual Calibration Approach to Meet Real Driving Emissions Requirements. In SAE Technical Paper Series; WCX World Congress Experience, APR. 10, 2018; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar]
- Gottorf, S.; Fryjan, J.; Leyens, L.; Picerno, M.; Habermann, K.; Pischinger, S. Lean Approach for Virtual Calibration Using Hardware-in-the-Loop and Electronic Control Unit (ECU)-Capable Engine Simulation. SAE Int. J. Engines 2021, 14, 531–542. [Google Scholar] [CrossRef]
- Xia, F. Real-Time Capable One-Dimensional Models for Internal Combustion Engines in X-in-the-Loop Applications; RWTH Aachen University: Aachen, Germany, 2020. [Google Scholar]
- Meli, M.; Pischinger, S.; Kansagara, J.; Dönitz, C.; Liberda, N.; Nijs, M. Proof of Concept for Hardware-in-the-Loop Based Knock Detection Calibration. In SAE Technical Paper Series; SAE WCX Digital Summit, APR. 13, 2021; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2021. [Google Scholar]
- Krysmon, S.; Dorscheidt, F.; Claßen, J.; Düzgün, M.; Pischinger, S. Real Driving Emissions—Conception of a Data-Driven Calibration Methodology for Hybrid Powertrains Combining Statistical Analysis and Virtual Calibration Platforms. Energies 2021, 14, 4747. [Google Scholar] [CrossRef]
- Mirzaeian, M.; Langridge, S. Creating a Virtual Test Bed Using a Dynamic Engine Model with Integrated Controls to Support in-the-Loop Hardware and Software Optimization and Calibration. Energies 2021, 14, 652. [Google Scholar] [CrossRef]
- Millo, F.; Accurso, F.; Piano, A.; Caputo, G.; Cafari, A.; Hyvönen, J. Experimental and numerical investigation of the ignition process in a large bore dual fuel engine. Fuel 2021, 290, 120073. [Google Scholar] [CrossRef]
- Exothermia. Exhaust. Available online: http://www.exothermia.com/exhaust-features (accessed on 10 April 2021).
- Franken, T.; Sommerhoff, A.; Willems, W.; Matrisciano, A.; Lehtiniemi, H.; Borg, A.; Netzer, C.; Mauss, F. Advanced Predictive Diesel Combustion Simulation Using Turbulence Model and Stochastic Reactor Model. In SAE Technical Paper Series; WCX™ 17: SAE World Congress Experience, APR. 04, 2017; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2017. [Google Scholar]
- Netzer, C.; Seidel, L.; Ravet, F.; Mauss, F. Impact of the surrogate formulation on 3D CFD engine knock prediction using detailed chemistry. Fuel 2019, 254, 115678. [Google Scholar] [CrossRef]
- RWTH. CONNECDT Homepage, C.M.P. Available online: https://www.mmp.rwth-aachen.de/go/id/eeofn (accessed on 9 November 2021).
- LOGE. CONNECDT Homepage. Available online: https://logesoft.com/public-projects/ (accessed on 5 April 2021).
- LOGEsoft; LOGEresearch, LOGEfuel, LOGEtable, LOGEengine. Loge AB, “LOGEsoft Manual” 2020. Available online: http://www.logesoft.com (accessed on 5 November 2021).
- Matrisciano, A.; Franken, T.; Perlman, C.; Borg, A.; Lehtiniemi, H.; Mauss, F. Development of a Computationally Efficient Progress Variable Approach for a Direct Injection Stochastic Reactor Model. In SAE Technical Paper Series; WCX™ 17: SAE World Congress Experience, APR. 04, 2017; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2017. [Google Scholar]
- Pasternak, M.; Mauss, F.; Perlman, C.; Lehtiniemi, H. Aspects of 0D and 3D Modeling of Soot Formation for Diesel Engines. Combust. Sci. Technol. 2014, 186, 1517–1535. [Google Scholar] [CrossRef]
- Tunér, M.; Pasternak, M.; Mauss, F.; Bensler, H. A PDF-Based Model for Full Cycle Simulation of Direct Injected Engines. In SAE Technical Paper Series; 2008 SAE International Powertrains, Fuels and Lubricants Congress, JUN. 23, 2008; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2008. [Google Scholar]
- Nett, O.; Pasternak, M.; Yang, Q.; Mauss, F.; Bargende, M.; Franken, T.; Grill, M.; Diezemann, M. Modelling Emissions of Diesel Engine Combustion with Variable Valve Timing. In Proceedings of the FVV Autumn Conference, Frankfurt, Germany, 21–25 September 2020. [Google Scholar]
- Mauß, F. Entwicklung Eines Kinetischen Modells der Rußbildung mit Schneller Polymerisation. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 1998. [Google Scholar]
- Lehtiniemi, H.; Borg, A.; Mauss, F. Combustion Modeling of Diesel Sprays. In SAE Technical Paper Series; SAE 2016 World Congress and Exhibition, APR. 12, 2016; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2016. [Google Scholar]
- Matrisciano, A.; Borg, A.; Perlman, C.; Lehtiniemi, H.; Pasternak, M.; Mauss, F. Soot Source Term Tabulation Strategy for Diesel Engine Simulations with SRM. In SAE Technical Paper Series; 12th International Conference on Engines & Vehicles, SEP. 13, 2015; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2015. [Google Scholar]
- Matrisciano, A.; Franken, T.; Gonzales Mestre, L.C.; Borg, A.; Mauss, F. Development of a Computationally Efficient Tabulated Chemistry Solver for Internal Combustion Engine Optimization Using Stochastic Reactor Models. Appl. Sci. 2020, 10, 8979. [Google Scholar] [CrossRef]
- Wang, X. Kinetic Mechanism of Surrogates for Biodiesel. Ph.D. Thesis, BTU Cottbus-Senftenberg, Cottbus, Germany, 2017. [Google Scholar]
- dSPACE GmbH. VEOS, “VEOS Manual”. 2020. Available online: https://www.dspace.com/en/inc/home/products/sw/simulation_software/veos.cfm#180_25666 (accessed on 29 November 2021).
- ESTECO. modeFRONTIER User Guide 2020R2. 2020. Available online: https://engineering.esteco.com/modefrontier/ (accessed on 19 November 2021).
- Franken, T.; Duggan, A.; Matrisciano, A.; Lehtiniemi, H.; Borg, A.; Mauss, F. Multi-Objective Optimization of Fuel Consumption and NO x Emissions with Reliability Analysis Using a Stochastic Reactor Model. In SAE Technical Paper Series; WCX SAE World Congress Experience, APR. 09, 2019; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Functional Mockup Interface. FMI Specification 2.0.2. github.com/modelica. Available online: https://fmi-standard.org/ (accessed on 11 November 2021).
- Blockwitz, T.; Otter, M.; Akesson, J.; Arnold, M.; Clauss, C.; Elmqvist, H.; Friedrich, M.; Junghanns, A.; Mauss, J.; Neumerkel, D.; et al. Functional Mockup Interface 2.0: The Standard for Tool independent Exchange of Simulation Models. In Proceedings of the 9th International MODELICA Conference, Munich, Germany, 3–5 September 2012; Linköping University Electronic Press: Linköping, Sweden, 2012; pp. 173–184. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Displacement | 2000 cm3 |
| Number of cylinders | 4 |
| Compression ratio | 16:1 |
| EGR system | Dual HP- and LP-EGR |
| Turbocharging system | Single stage VNT 1 |
| Maximum engine power | 120~130 kW |
| Maximum engine torque | 380~450 Nm |
| Fuel system | Common rail DI 1800 bar |
| Vehicle category | D-segment * |
| Wheel drive system | RWD 1 |
| Curb weight | 1500 kg |
| Nominal peak torque | 400 Nm (1750–2500 1/min) |
| Transmission type | 6 speed transmission (manual) |
| Density at 25 °C | 833.4 kg/m3 |
| Lower heating value | 42.61 MJ/m3 |
| C:H:O 1 ratio | 14.1:25.9:0.13 |
| FAME 1 content | 9.8% |
| CN for CFR 2 | 53.1 |
| Component | Modeling Approach |
|---|---|
| Air filter |
|
| Valves |
|
| Manifolds |
|
| Turbocharger |
|
| Intercooler |
|
| Squish factor | 1 |
| Injection factor | 0.06178 |
| Mixing time factor | 14.8477 |
| Friction factor | 1.5 |
| Axial flow factor | 0.2 |
| Vortex size factor 1 | 7 |
| Vortex size factor 2 | 1.64157 |
| Angular momentum | 1 × 10−7 |
| Injection pressure | bar |
| Fuel density | kg/m3 |
| Engine speed | 1/min |
| Liner/piston/head wall temperatures | K |
| Injections SOI 1 and EOI 2 | deg |
| Fuel temperature | K |
| Start/stop crank-angle | deg |
| Injection mass | mg/str |
| Temperature at IVC 3,* | K |
| Pressure at IVC * | Pa |
| Equivalent ratio | - |
| EGR ratio at IVC | - |
| Temperature at EVO * | K |
| Exhaust manifold pressure | Pa |
| Pressure at EVO | bar |
| Fuel/air/EGR mass | kg |
| Fuel/air/EGR mass fractions | - |
| Cylinder pressure | bar |
| Lambda | - |
| IMEP | bar |
| Brake torque | Nm |
| Injection mass | mg/str |
| Enthalpy | J |
| NOx/soot/uHC/CO emissions | mg/s |
| Q10/Q50/Q90 1 | deg |
| Aspect | Impact on Accuracy |
|---|---|
| Valve linearization |
|
| Usage of Coolant temperature |
|
| Emission modeling |
|
| Cylinder filling |
|
| Manifolds |
|
| Intercooler |
|
| Turbocharger |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Picerno, M.; Lee, S.-Y.; Pasternak, M.; Siddareddy, R.; Franken, T.; Mauss, F.; Andert, J. Real-Time Emission Prediction with Detailed Chemistry under Transient Conditions for Hardware-in-the-Loop Simulations. Energies 2022, 15, 261. https://0-doi-org.brum.beds.ac.uk/10.3390/en15010261
Picerno M, Lee S-Y, Pasternak M, Siddareddy R, Franken T, Mauss F, Andert J. Real-Time Emission Prediction with Detailed Chemistry under Transient Conditions for Hardware-in-the-Loop Simulations. Energies. 2022; 15(1):261. https://0-doi-org.brum.beds.ac.uk/10.3390/en15010261
Chicago/Turabian StylePicerno, Mario, Sung-Yong Lee, Michal Pasternak, Reddy Siddareddy, Tim Franken, Fabian Mauss, and Jakob Andert. 2022. "Real-Time Emission Prediction with Detailed Chemistry under Transient Conditions for Hardware-in-the-Loop Simulations" Energies 15, no. 1: 261. https://0-doi-org.brum.beds.ac.uk/10.3390/en15010261