
Energy Efficient Communication Design in UAV Enabled WPCN Using Dome Packing Method in Water Distribution System


Faculty of Computing, Engineering and Built Environment, Birmingham City University, Birmingham B4 7XG, UK
*
Author to whom correspondence should be addressed.
Energies 2022, 15(10), 3844; https://0-doi-org.brum.beds.ac.uk/10.3390/en15103844
Submission received: 12 April 2022
/
Revised: 9 May 2022
/
Accepted: 19 May 2022
/
Published: 23 May 2022
(This article belongs to the Special Issue Frontier 2021: Internet of Things Technology for Smart Water Application)
Abstract
:The water distribution system has deployed several low-power IoT devices on an uneven surface where battery power is a major concern. Therefore, this paper focuses on using a UAV-enabled wireless powered communication network capable of directing energy to a target location and using it for communication, thereby reducing battery issues. In this paper, a static optimization was applied to find the initial height values using 3D clustering and beamforming method and dynamic optimization using extremum seeking method was applied to find the optimized height. The optimized height values were calculated and Travelling Salesman Problem (TSP) was applied to create the trajectory of the UAV. The overall energy consumption of the UAV was minimized by integrating dynamic optimization and dome packing method, which can find an optimal position and trajectory where the UAV will be hovering to direct energy and collect data. Moreover, we also minimized the total flight time of the UAV.
1. Introduction
The water distribution systems (WDS) are crucial to the water supply in cities as it directly affects public health. However, water quality is hard to maintain as its prone to contamination during distribution [1]. The goal of researching new technological advancements in WDS is to improve energy efficiency and security as a high amount of data will be collected in real-time for water quality monitoring [2,3]. Besides, the water quality sensors are battery operated and it depletes after a specific time period which requires human labour for its charging or replacement [4]. For these reasons, many efforts are made in the technological advancements that could be integrated with the WDS to minimize communication cost and time and thereby reduce human effort. The research in the field of wireless powered communication networks (WPCN) and unmanned aerial vehicle (UAV) is leading to more ways to ensure water quality and optimize the cost and energy during communication between the sensors and the UAV [5,6].
In the early days, UAV’s were used widely as a communication equipment for data collection and transmission in wireless networks. Now, it is used as a wireless base station to transfer energy and collect data from the ground nodes (GN) using a wireless powered communication network (WPCN). In WPCN, the GN’s harvest energy from the radio frequency (RF) signals and use this energy to transmit information collected to the uplink/UAV which is termed Wireless energy transfer (WET) and Wireless information transfer (WIT). There is a lot of technological advancements and research happening in the water distribution system (WDS) especially in remote water monitoring using wireless sensors and Supervisory control and data acquisition, but battery depletion, human labour for battery replacement, and a huge amount of data transmission during the communication required more attention [7]. The WPCN in cellular communication was implemented with fixed base stations which broadcasts energy to the receivers for data collection and communication. Since the base stations were fixed, users who are far away receive less energy and require more energy for data transmission which is called a doubly near-far problem. The doubly near-far problem encountered due to the line of sight (LOS) issues with fixed based stations were resolved using the UAV as a flying base station in the WDS [8,9].
The key issue encountered in adopting WPCN in WDS was energy optimization during communication, as the UAV’s onboard energy is limited and must be allocated for communication, moving, hovering, and other activities, which was one of the main motives for the research. The energy efficiency of the communication may be improved by optimizing the UAV’s trajectory and determining an appropriate height for the UAV to traverse, hence minimizing the overall flight time and energy used during the conversation [10]. Further study was required in the domain of real-time water monitoring since water quality must be checked regularly owing to a variety of problems such as leaks, floods, and other issues, and this generates a large quantity of data, prompting the selection of WDS as the application scenario.
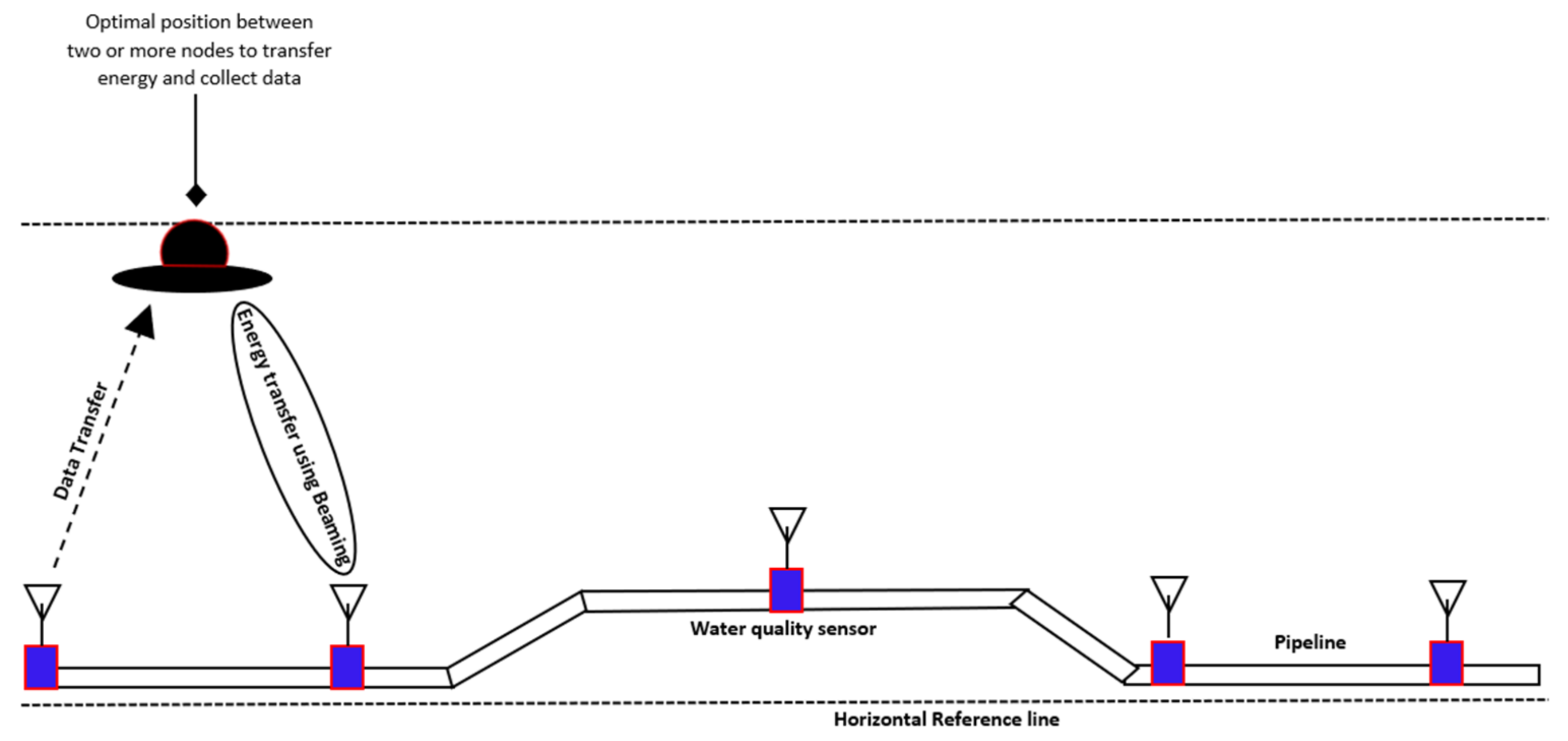
The project aims to find an optimal energy management strategy to complete a mission that includes charging and data acquisition to and from all the GN’S. The application scenario taken for this research is illustrated in Figure 1 where the UAV-enabled WPCN were able to wirelessly transfer energy to charge the GN’s using energy beamforming and collect water quality information for further processing.
One of the main problems in WPCN is the near-far problem where the base station was fixed and the users who are far away from the base station receive less energy during the wireless energy broadcast and different protocols and techniques such as harvest then transmit protocol, user cooperation, etc., were implemented at first to address this problem [11]. Later, the problem was solved in much research by using a UAV as a mobile base station which is also used in this paper [12,13,14]. Since the battery capacity of the UAV is limited, it is critical to research how to reduce the UAV’s energy consumption so that the wireless network’s connection time may be extended. In some of the research works, the authors assumed that the UAV has sufficient energy for completing the given task for secure data collection [15,16] whereas in [17] reduce the energy usage of the communication by finding an optimized trajectory path using successive convex approximation technique for a mobile relay network [18]. In [19] the placement of the UAV optimization and performance analysis was studied to understand various characteristics of UAV enabled base station. A multi-UAV communication network has been studied in [20] where the minimum throughput was maximized by optimizing the trajectory, power allocation, user scheduling, and resource allocation. The problem of trajectory and resource allocation optimization for UAV-mounted systems has been addressed in orthogonal frequency division multiple access (OFDMA) systems [21], Internet of Things (IoT) networks [22], and multicasting systems [23].
The development of Beamforming in antenna design encourages researchers to integrate with applications such as satellite, energy harvesting, wireless communications, etc., [24]. Beamforming is a wireless communication technique that could be integrated with UAVs to direct an energy signal to a specific receiver. In several studies, beamforming is used to increase the capacity of the uplink for onboard UAVs [25,26]. Since the beam is directed to a specific receiver, it results in increased coverage, security, quality of service, and a higher data rate with minimum interference. To enhance the energy efficiency, the physical components that make up the UAV’s weight were taken into account in [27,28], whereas [29,30] used iterative algorithms in UAV-enabled sensor networks to optimize the energy transfer and thereby increase the energy efficiency. Energy efficiency is optimized by power distribution, trajectory, user scheduling, and bandwidth in wireless mobile communication in [31], where the UAV functions as an aerial base station. Most UAV communication designs include trajectory, routing, or route optimization to improve energy efficiency, performance, and throughput. The research of [32,33] suggested an energy efficiency model and design based on the trajectory route, speed, and time of a fixed-wing UAV. For sum throughput optimization in solar-powered UAV communication, [34] employed a 3D trajectory and resource allocation. The majority of the research focuses on energy optimization on an even plane, with the UAV’s height assumed to remain constant. Table 1 shows that there is no significant study on minimizing the overall energy of the UAV in a terrain, according to the literature [25,26,27,28,29,30,31,32,33,34].
The paper is based on extending the work [35] which focuses on finding an optimal position using a dome packing method where the UAV acts as an energy transmitter and a data receiver. Whereas, this paper proposes two optimization models, in which a dome packing technique is used to combine and pack the sensors based on the beamforming range and a dynamic optimization model to determine the ideal positions of the UAV to charge the sensors on the ground. In addition, this study provides a theoretical model for minimizing the energy utilized in UAV-enabled WPCN by optimizing the UAV’s location in the terrain.
This paper addresses the challenges of energy management of sensing and communication in the water distribution system and aims to minimize the total energy consumption and completion time of the UAV-enabled WPCN during communication in WDS.
The contributions can be summarized as follows:
- A rotary-wing UAV-based WPCN framework is proposed for WDS for energy-efficient communication.
- The dome packing method calculates the optimal hovering positions to communicate with the ground users (charging / data transfer) by optimizing a number of hovering points using dynamic optimization, hovering duration, and order of visit using 3D clustering and TSP.
- An energy-efficient trajectory design for the communication between the UAV and the GN’s using beamforming.
2. Design the System Model of UAV Enabled WPCN in WDS
2.1. System Model Design
In our model, we assumed that the UAV would have a constant power source for charging and the energy optimization is considered only for the communication [36]. It is also assumed that the UAV starts from point X and finishes at point Y and the energy calculations are based on this assumption. The UAV is integrated with a uniform rectangular antenna array (URA) with N antenna elements and the horizontal position at any time t will be u(t) = (x(t), y(t)). The GNs are located at fixed points on the ground gn = (xn, yn, hn) and are equipped with two omnidirectional antennas for WIT and WET. The distance between the UAV and the GN’s (d) at any time can be calculated using the distance formula [37].
where is the flying height of the UAV. The wireless link between the UAV and the GN’s are calculated using a vector , where denotes the space of Nx1 complex matrices of N element transmitter [38].
where is the steering vector, are the elevation and azimuth angles of the LOS/NLOS path of the UAV and the ground node. For LOS path and for NLOS . and are the large scale and small-scale fading variables where where as depends on the line of sight(LOS) and non-line of sight(NLOS) links between the transmitter and the receiver [38].
where
In the above formulas PL represent path loss, is the LOS probability i.e., , d0 is the reference distance of 1 metre, FS represent free space path loss, is the frequency and c is the speed of light, and are the path loss exponents for LOS and NLOS communication which depends on the environment, Gt and Gr are the transmitter and receiver antenna gains [5].
To create a beamforming energy signal (S) which is derived by referring to the work [39].
where w is the beamforming vector along with the energy signal and is the transmitted power from the antenna array. The beamforming vector is calculated as w = where is an eigenvector calculated by finding the maximum eigen value (Ei) from the matrix L where . The square of the Euclidean norm of beamforming energy signal should be less than or equal to the power spectrum density of each sub bands and [39,40].
Let be the total time required for energy transfer and data transmission and T be the time required to complete the mission here we also consider that the amount of energy received will be fully utilized by the GN’s for data transmission such that no energy is wasted. Let X be the time for energy transfer, then 1 − X will be the time required for data transmission. It is assumed that equal time is assigned for energy transfer and data transmission.
The harvested power should be greater than equal to the threshold ( value of the GN’s which will be assumed to be a constant and depends on the distance of transmission. Hence, is a function of and d is the distance between the UAV and the GN’s [41].
where and is the Euclidean norm of the eigen vector and η is the energy conversion efficiency which will be assumed to be a constant.
Similarly, the energy consumed by the UAV for WET is [42].
Data Transmission
The energy consumed by the GN’s during data transmission
According to Shannon-Hartley’s theorem, the Data transmission rate R is
where SNR = are the transmit power and noise power of GN’s and data transmission time () will be equal to the size of data transmitted (Sz) to the data transmission rate [43] and hence
R = B log2(1 + SNR)
Now, the overall energy consumption of the UAV during each communication cycle i.e., the energy required by the UAV for propulsion and WET
where represents the propulsion energy used by the UAV, that is used for hovering and moving [44].
2.2. Problem Formulation
The total energy consumption and usage were always an issue in UAV enabled WPCN due to the limited onboard energy in the UAV. Minimizing the total power consumption and execution time of the UAV enabled WPCN during communication in the WDS during the mission could resolve this problem. To find the optimal energy used for the communication, a cost function needs to be calculated. The potential and kinetic energy used by the UAV is represented using T = 1/2mv2 and V = mgh and . According to Lagrange’s rule L = V − T and therefore with extended Lagrange’s rule L= V − T − .
Therefore, the Energy function is
where = −a represents the (vertical)dynamics of the UAV and a is the time constant [45]. Therefore:
The problem can be formulated as
The constraints for the problem are as follows: For simulation, must be greater than the GN threshold energy multiplied by d2, which in turn is where is the elevation of the UAV (18). The velocity is assumed to be at the maximum (16) and are the initial and final locations of the UAV to complete the mission (17). The energy function problem will be quadratic equation and can be formulated as a linear quadratic equation and solved using linear quadratic regulator in MATLAB. The model calculates the range/position of where the Energy function is at maximum.
3. Dynamic Optimization
This section describes dynamic optimization methods that has been used in this work.
3.1. Implementation of the Proposed Model
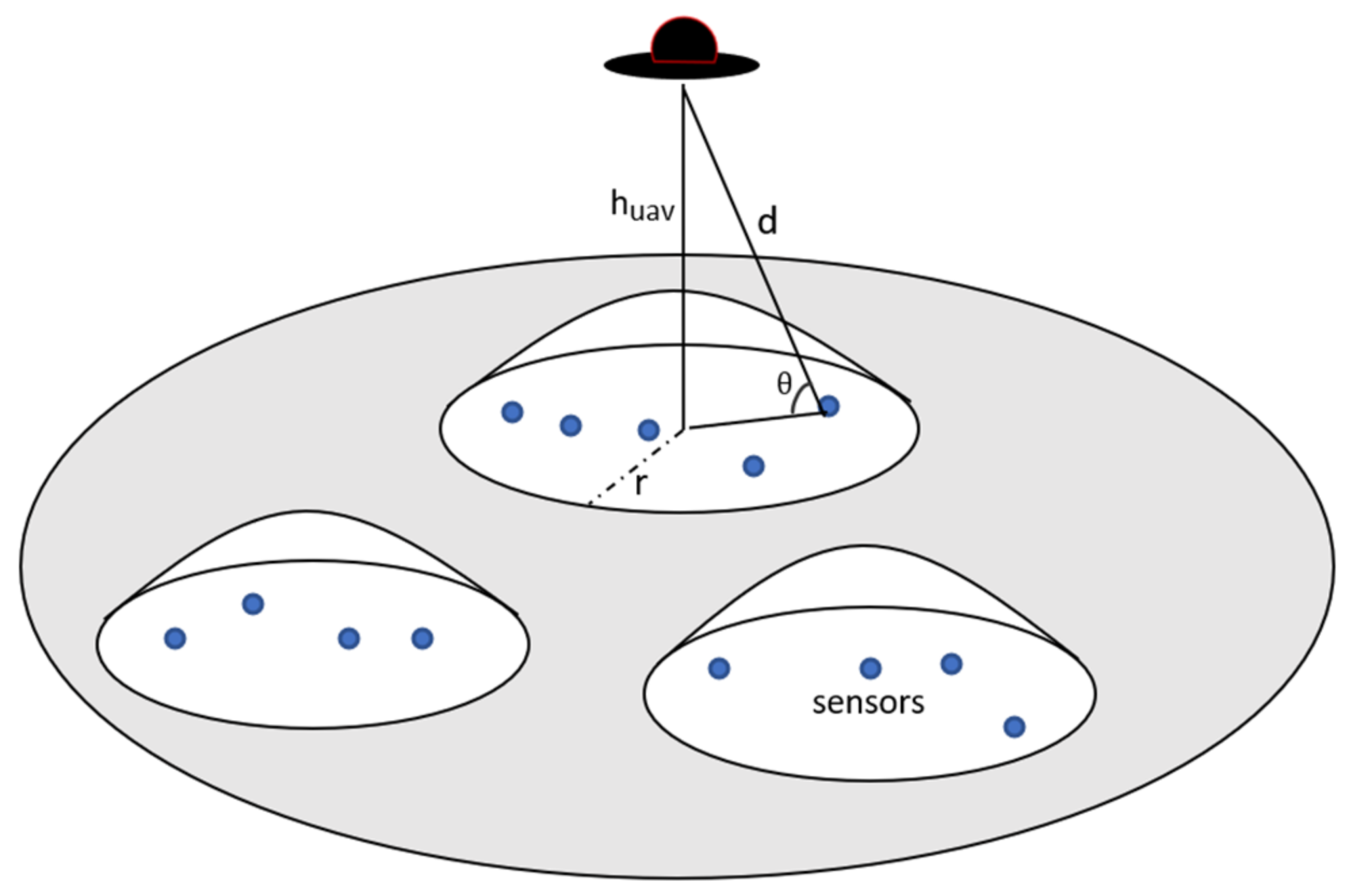
In this initial optimization, we use a dome packing method (DPM) to find an optimized position at which the UAV could hover for WET and WIT as in Figure 2. The GN’s are represented as sensors and UAV at an initial height of h and the distance between the UAV and the GN is represented by d in Equation (1) and θ is the angle between the UAV and the GN. The dome packing Algorithm 1 [35] is as follows:
| Algorithm 1: The algorithm to implement Dome packing method (DPM) |
| 1: Initialize the system parameter values 2: Repeat for n = 1:k Perform 3D clustering of the GN’s and calculate the clusters and its cluster centriods (c1…cx) 3: end 4: Repeat n = c1:cx, Position the UAV at the cluster centroid 5: Calculate beamforming range based on the antenna array to findfrom the cluster centroids 6: If GN’s are unreachable, calculate Δ (,,) which will be the change in position and the UAV will be repositioned until an LoS is established. else 7: continue/go to step 4 8: end |
In the dome packing method, M domes are arranged inside the simulated area with a maximum packing density and radius r without overlapping each other. For implementation, K means algorithm is used to implement three-dimensional (3D) clustering and after calculating the beaming range [35], an initial optimal height ( ranges are calculated for each of the clusters since the positions of the GN’s and the distance from the cluster centre towards the GN’s are known. The optimal height ( is calculated as in Section 3.2 using extremum seeking control. The number of hovering points is determined by the cluster centres created using the K means algorithm.
The order of the visit of the GT’s is implemented by using the Travelling salesman problem (TSP). In this work, greedy heuristic algorithm is used to construct the trajectory of the UAV as it provides results very close to the optimum solution [45]. The hovering time of the UAV is shared evenly between WET and WDT and it depends on the throughput requirements of the GT’s. The hovering time also depends on beaming, number of clusters and WET time required to charge the ground terminals. Hovering time is also affected by beaming, the number of clusters, and the amount of WET time needed to charge the ground terminals. To compute the total energy for travelling, hovering, and WET, a trajectory path employing these hovering points is generated, as shown in Equation (13).
The computational complexity is represented in this DPM using the big O notation. The complexity of the method is O(nt) since it has one inner loop with n iterations and one outer loop with t iterations. In the next step, the K means algorithm is employed, which calculates to O(n*d*k*l), where n is the number of data points, d is the dimension, k is the number of centroids, and l is the number of iterations performed. Finally, in order to use the beamforming approach, the channel’s covariance matrices must be computed first, which takes O(N2). Then, in order to calculate the null phase of the interference outputs, the eigen vector corresponding to the biggest eigen value is chosen resulting in O(N3). The steering vector is then computed and projected to the null space, which is O(N). As a result, the beaming method’s computational complexity is O(N3). The parameters used for implementing the scenario are provided in Table 2 [41,42].
3.2. Optimization Using Extremum Seeking Control
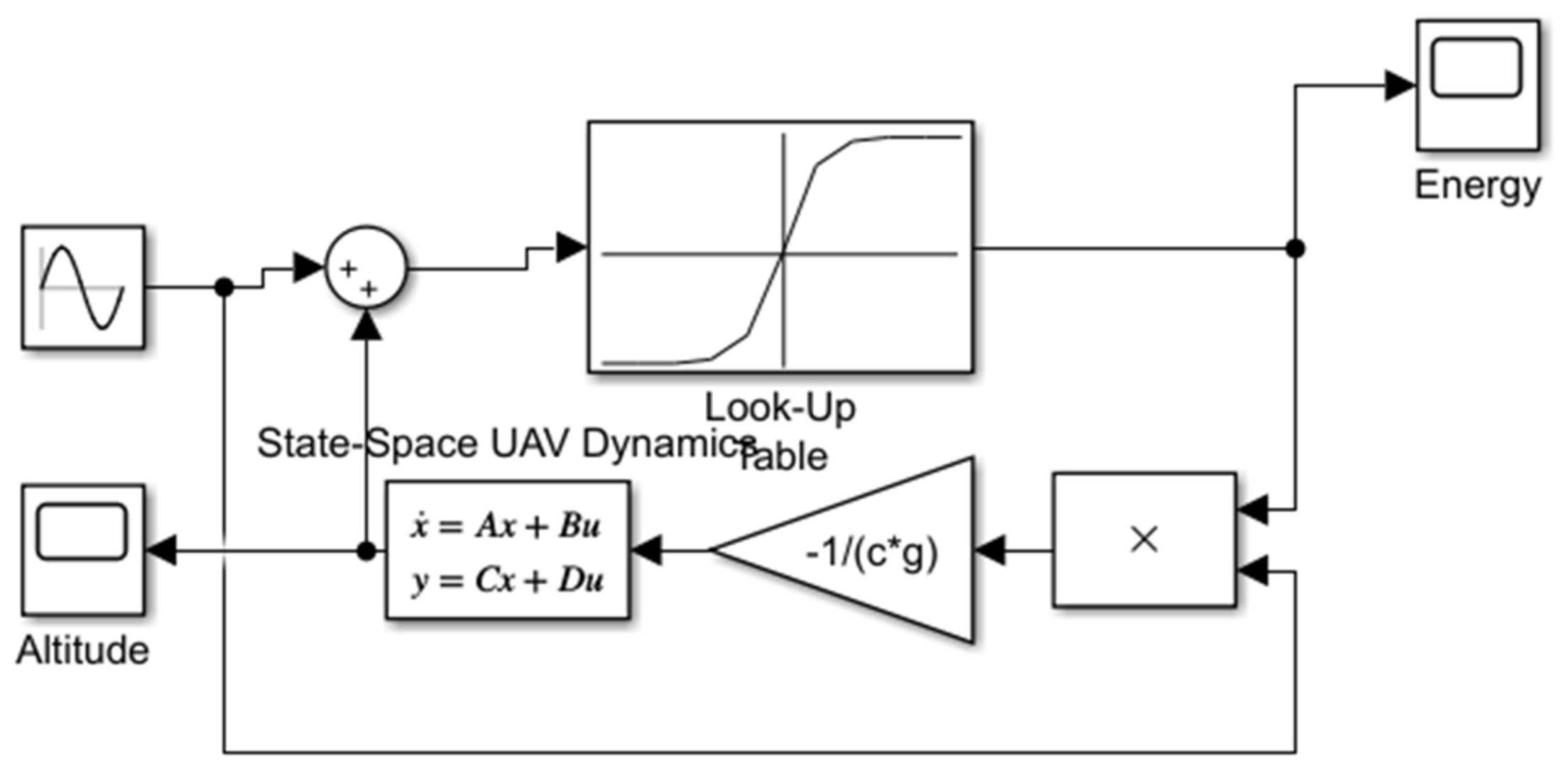
To solve this optimization, by using the initial optimization output (height) as the initial condition to the dynamic model to calculate a further optimized height for wireless communication between the UAV and the GN where energy function E in Equation (14) is at maximum. The optimization model using extremum seeking control is represented in Figure 3 where the UAV dynamics, as well as the initial conditions or output of the initial optimization (Energy and height), are fed as input to the lookup table. The altitude scope provides optimal height as output from the model.
The extremum seeking control scheme of Figure 3 is underpinned by the Theorem of Averaging, by which a T-periodic signal and u is the input signal [46,47].
is equivalent, to within O() where > 0, to its ‘average’ value
Expanding the input to the integrator in a Taylor series:
Applying the Theorem of Averages:
Thus, the stationary point of E is an equilibrium point of the system as in (21) and can be shown [48], to be stable if the condition is for a maximum. The larger the perturbation, the faster the maximum is reached. Since h has to satisfy both the system dynamics (f) and the static constraint (E), this can only be achieved when E and h are independent, i.e., at the optimum, where the curve E is flat. In this case, f represents the state model and E, the energy (as in Equation (13)) and h, the state variable and the model is represented as in Figure 3.
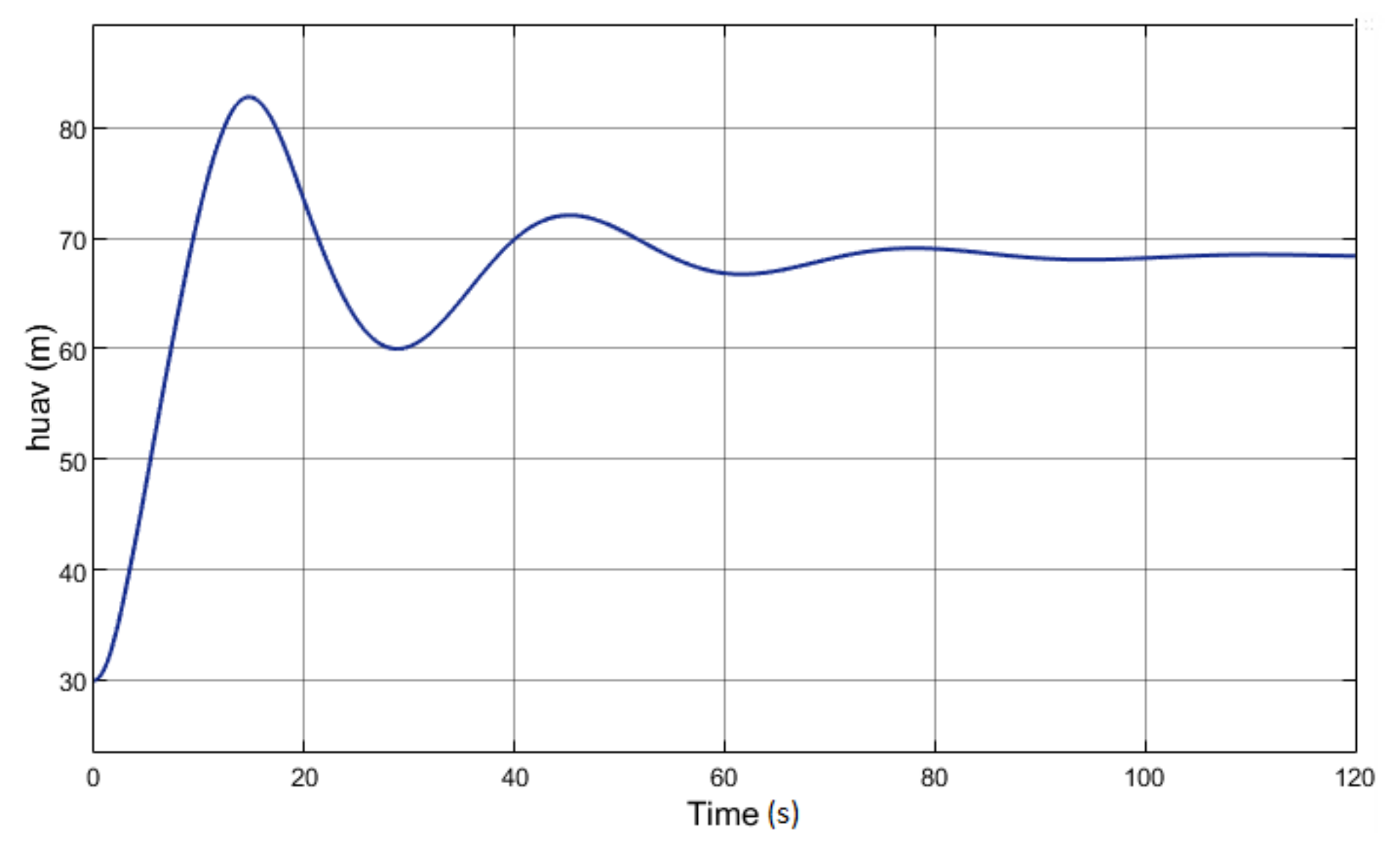
The output (altitude) from the extremum seeking is applied to the proposed model in Section 3.1. The optimized height of one among the clusters is obtained as in Figure 4 and a trajectory path through these optimized heights is designed and TSP is applied to generate an optimized trajectory for the UAV to complete the mission.
4. Simulation Results
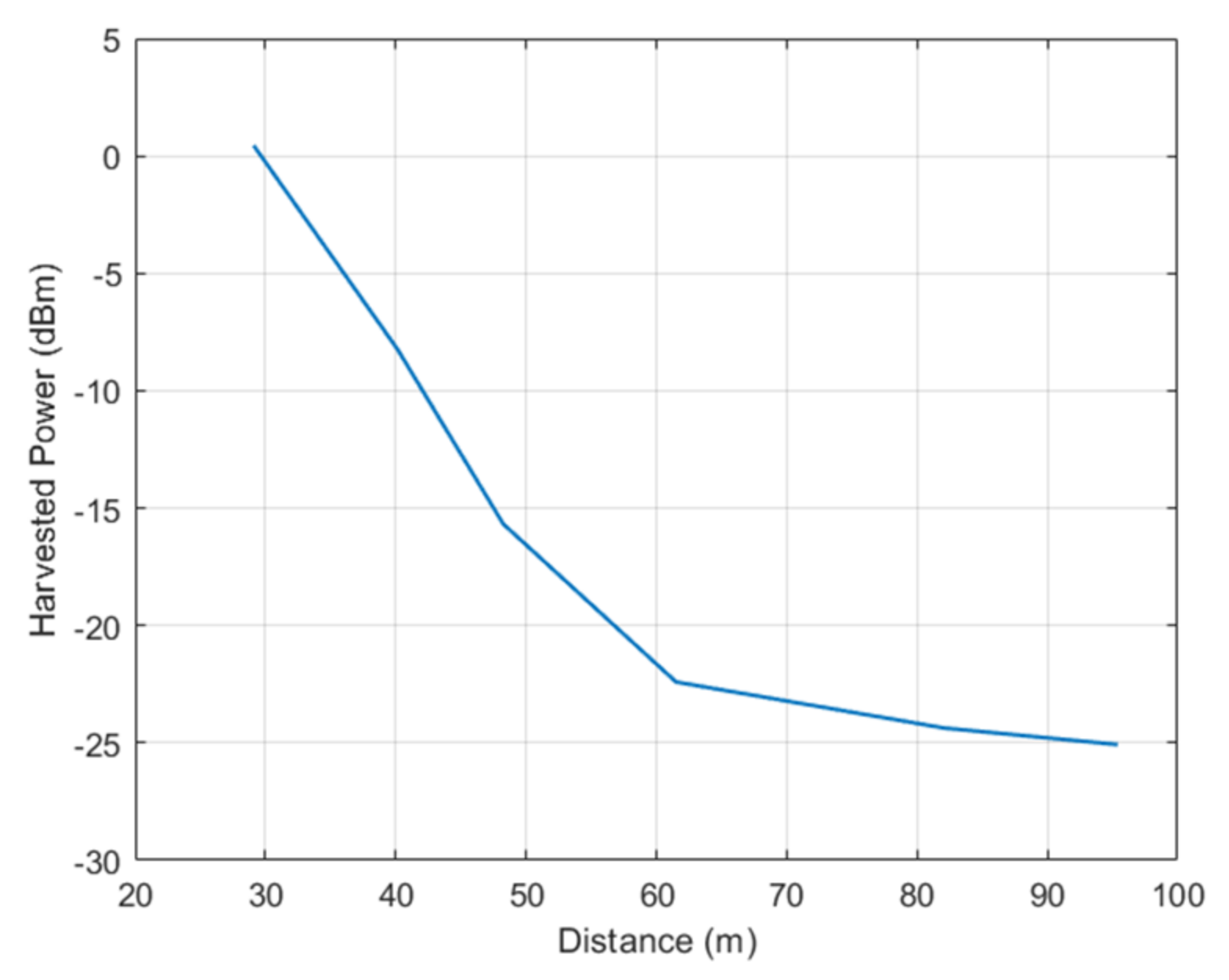
This section evaluates the performance of the proposed methods to prove their efficiency. In the simulations, we assume that the maximum height of the UAV is 100 m and the UAV will be integrated with a uniform rectangular array (URA) to implement beamforming. Figure 5 depicts the amount of energy harvested by the GN’s at a distance d from the UAV with N antenna elements implemented and analyzed using MATLAB.
Optimization Outputs
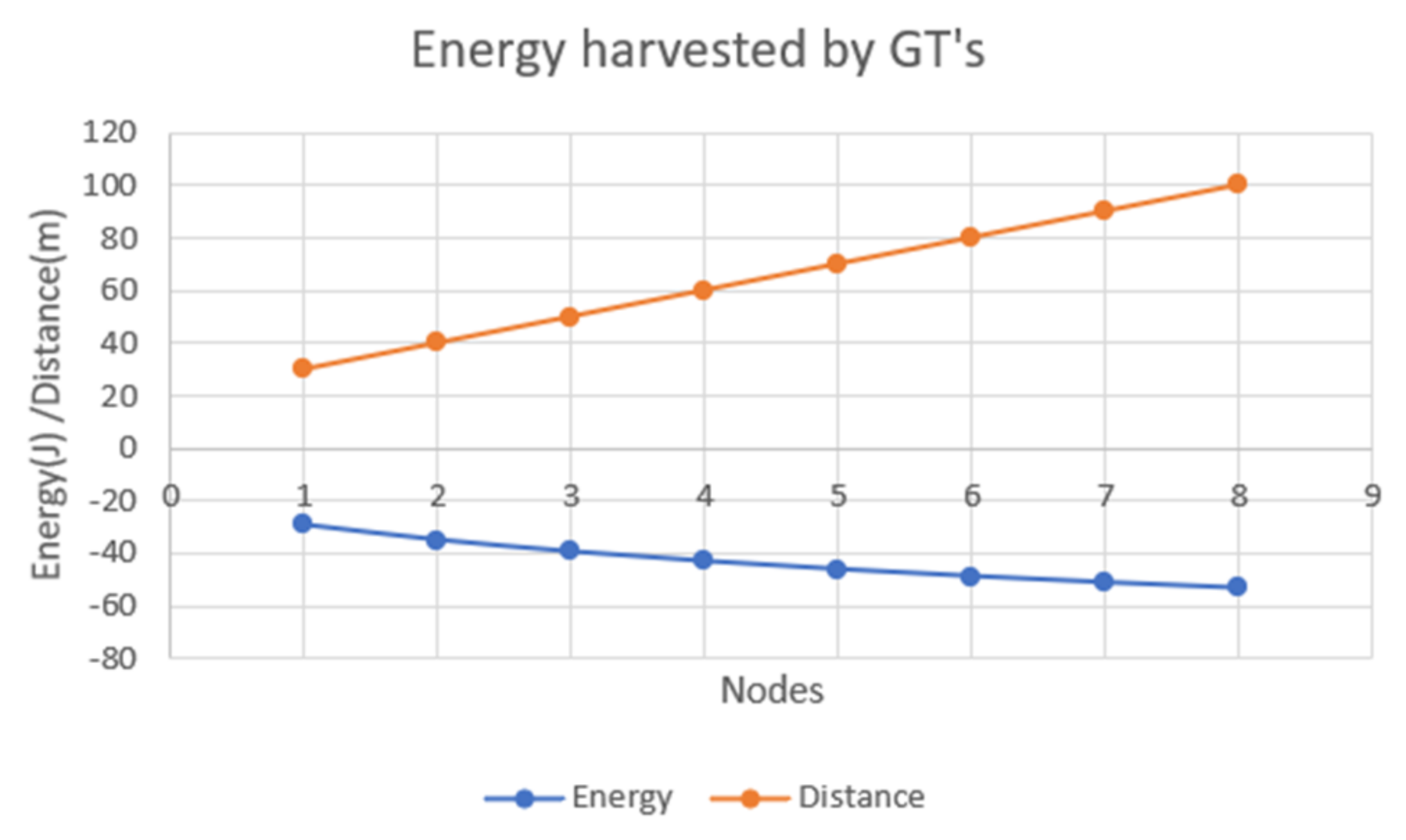
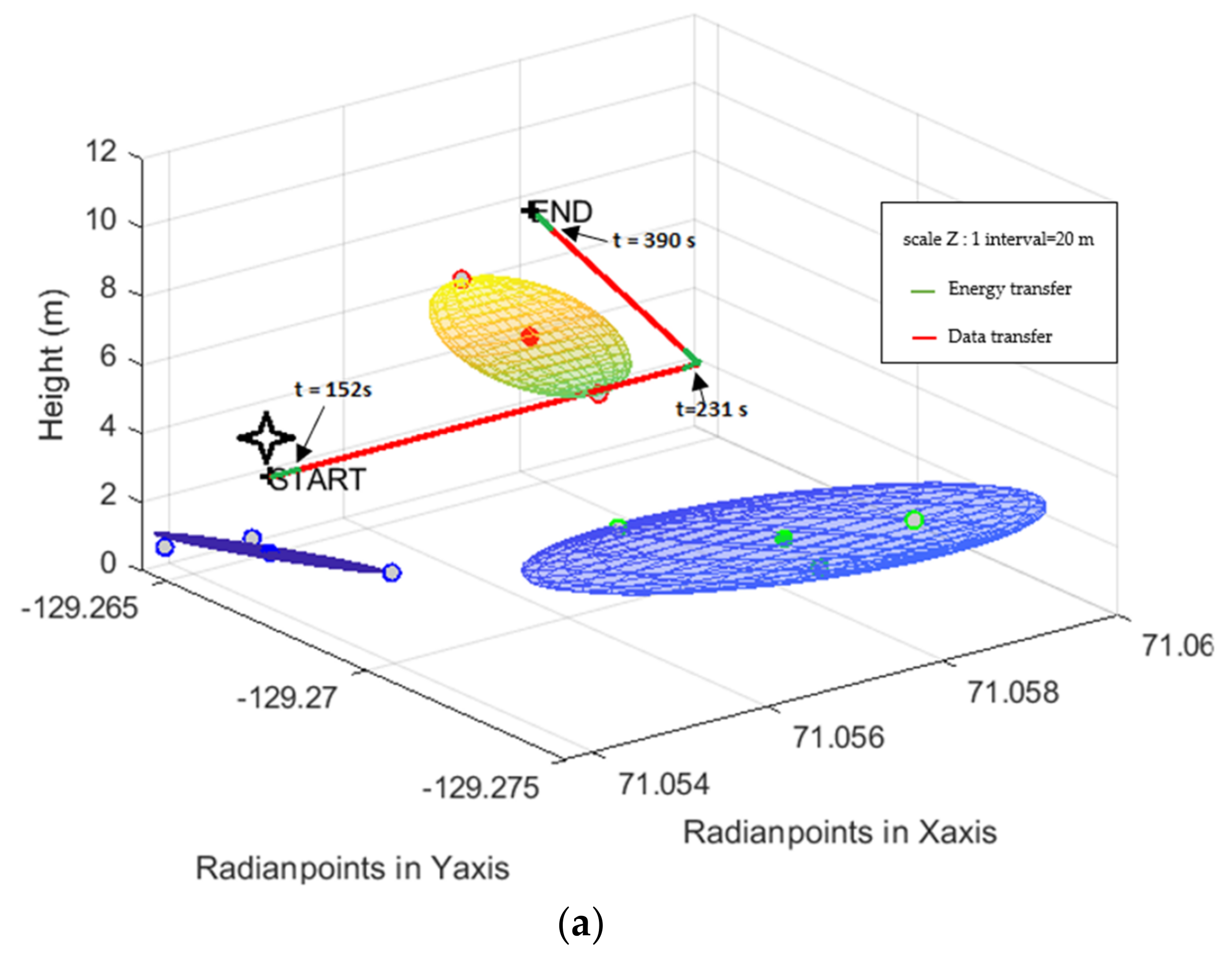
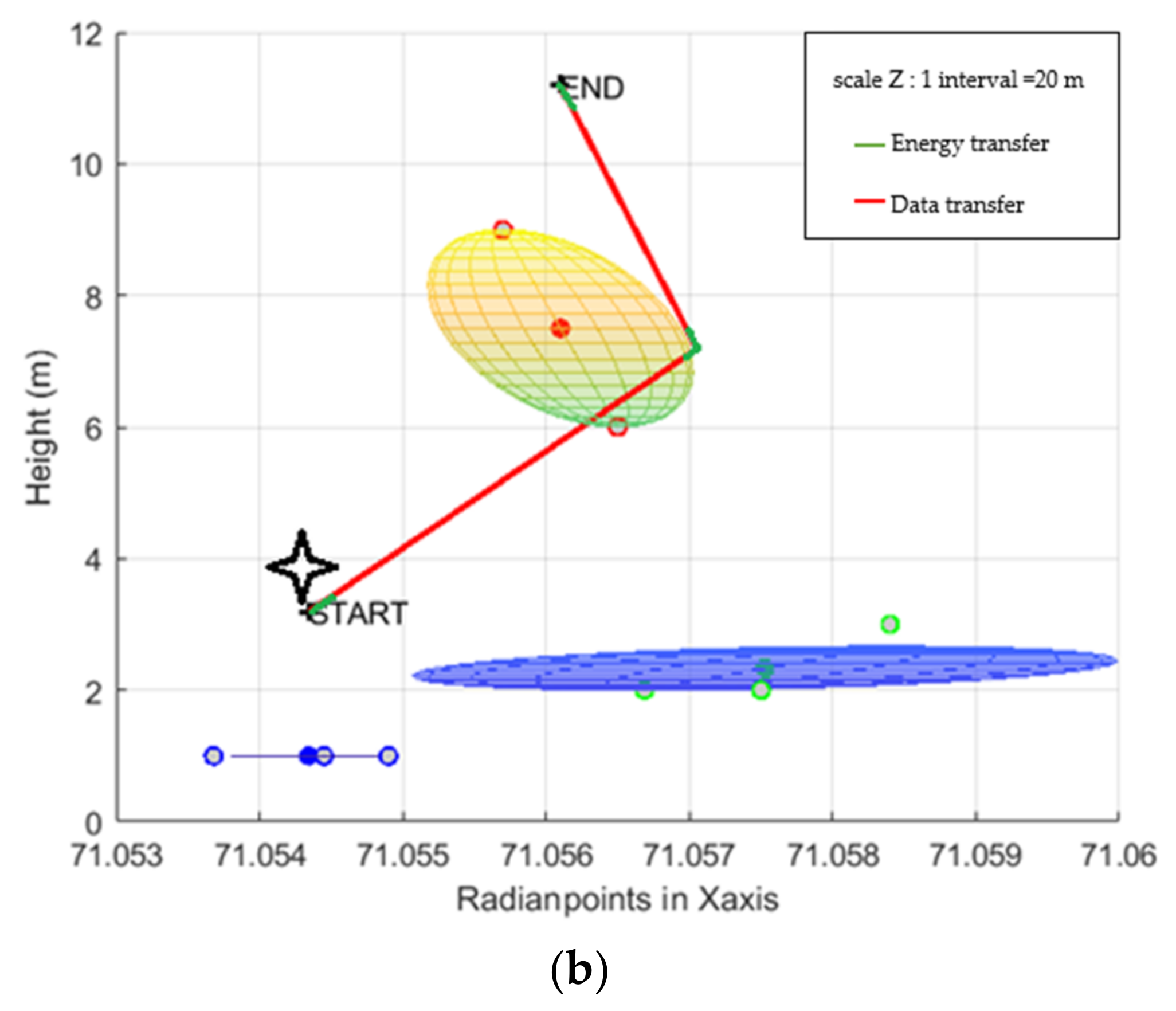
Figure 6 shows the energy harvested using beaming by each of the GT’s at t = 1 s based on the distance d and how it varies over distance expressed in meters. The implementation of the proposed model is represented in Figure 7a,b with a front and a side view. From Figure 7a, a clear picture of the new trajectory path after optimization with total flight time represented as t in seconds. The start and the end represent the starting and ending positions of the UAV to complete the mission. Based on the DPM, the WET begins at the starting points, charging each of the ground nodes and WDT happens when it starts charging the next node. So, there is an overlap of WET and WDT which helps in minimizing . The distance between the GT’s is assumed to be 50 m apart and the filled markers in different colours represent the GT’s and their cluster centres at each cluster.
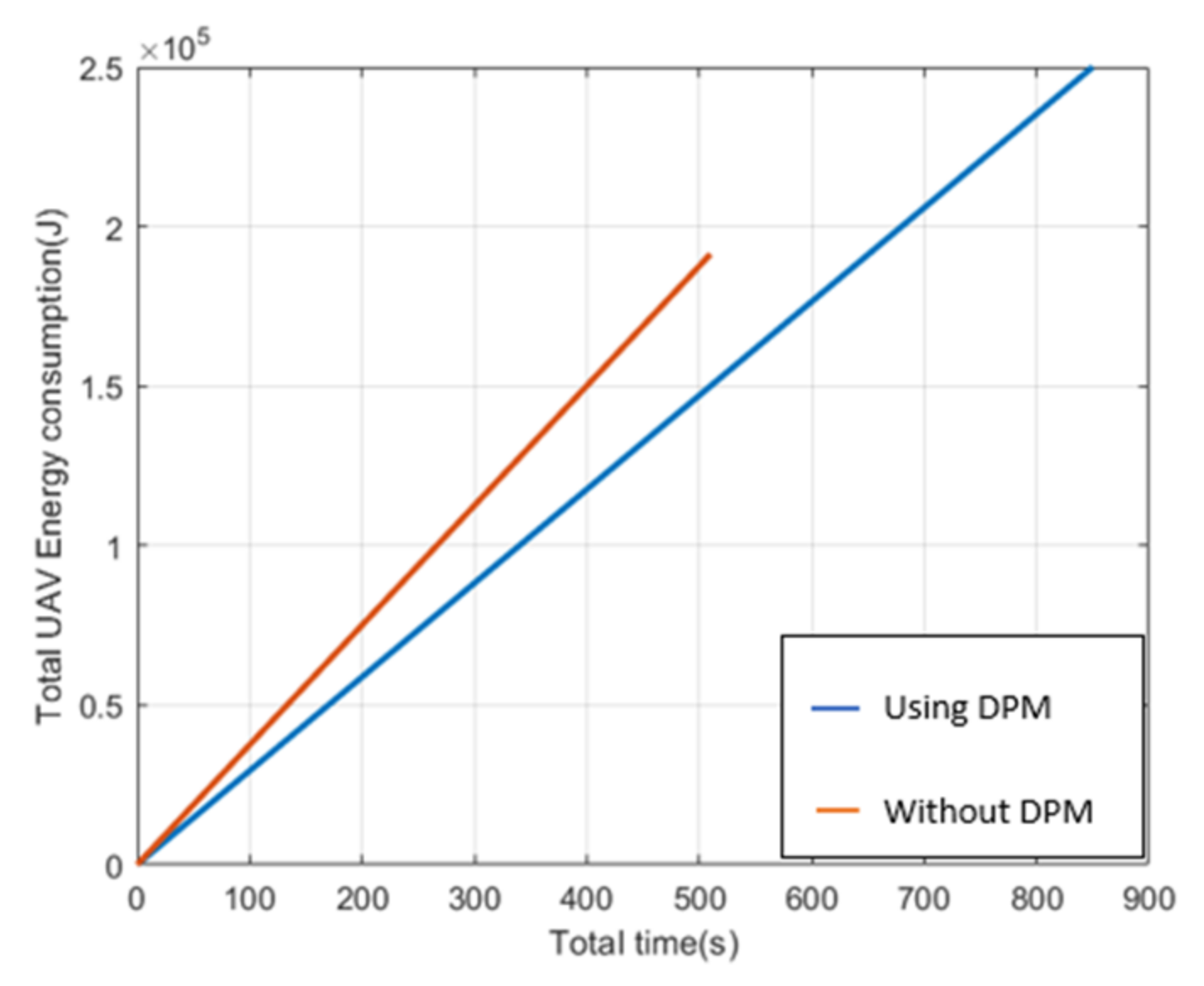
In Figure 7 an evaluation of the proposed method where the energy consumption of the UAV with and without DPM using (14) is represented with a data transfer rate of 60 Mbps. It is evident from the graph in Figure 8 that the proposed method will be completed efficiently with less energy consumption of the UAV and when compared to the existing method [41,48]. In the existing method, the charging of the GT’s is on a sequential basis by using an RF charging method where the UAV will be at a constant height for WDT and WET by using a heuristic approach by calculating an optimal trajectory through the tangential points of the assumed energy transfer and data collection points. Since the RF charging could be done within a reduced range of the GTs, it results in increased total flight time.
Firstly, the suggested solution reduces the overall time by charging the GTs using a much more targeted beaming manner rather than broadcasting it to all users. Secondly, the use of 3D clustering and optimization using extremum seeking control helps to manage the nodes and thereby finding an optimal position and trajectory for both WET and WDT saves the majority of the change in heights during the flight that leads to the reduced energy consumption of the UAV.
5. Conclusions
WPCN research is rapidly expanding, and when combined with computation, beamforming, and energy harvesting, it could lead to new technologies in communication. In this paper, a UAV-enabled WPCN is implemented in a terrain WDS to calculate an optimal position to reduce the UAV energy consumption where the UAV acts as an energy transmitter and data receiver. The first optimization in this paper is to find the best position and trajectory using a proposed dome packing method by optimizing the number of hovering points, hovering duration, and order of visit. The output of the first optimization (energy and position) is fed as an input to the dynamic optimization model to prove its efficiency.
Author Contributions
Conceptualization, V.R. and W.W.; methodology, V.R. and W.W. formal analysis, V.R. and W.W.; investigation, V.R. and W.W.; data curation V.R.; writing—original draft preparation, V.R.; writing—review and editing, V.R. and W.W.; supervision W.W.; funding acquisition W.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research has received funding from Birmingham city University and the European Union’s Horizon 2020 research and innovation program under the Marie Sklodowska-Curie Training Networks (ITN)-IoT4Win grant agreement No. [765921].
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mahmoud, H.; Wu, W.; Gaber, M.M. A Time-Series Self-Supervised Learning Approach to Detection of Cyber-physical Attacks in Water Distribution Systems. Energies 2022, 15, 914. [Google Scholar] [CrossRef]
- Shahra, E.; Wu, W.; Gomez, R. Human Health Impact Analysis of Contamination in Water Distributed Networks. Appl. Sci. 2021, 11, 3398. [Google Scholar] [CrossRef]
- Shahra, E.Q.; Wu, W. Water contaminants detection using sensor placement approach in smart water networks. J. Ambient Intell. Human Comput. 2020. [Google Scholar] [CrossRef]
- Pasika, S.; Gandla, S.T. Smart water quality monitoring system with cost-effective using IoT. Heliyon 2020, 6, e04096. [Google Scholar] [CrossRef]
- Radhakrishnan, V.; Wu, W. Wireless Powered Communication Network in Iot enabled water distribution system. In Proceedings of the International Computing & Control for the Water Industry Conference, Exeter, UK, 1–4 September 2019. [Google Scholar]
- Pahonțu, B.; Arsene, D.; Predescu, A.; Mocanu, M. Application and challenges of Blockchain technology for real-time operation in a water distribution system. In Proceedings of the 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020; pp. 739–744. [Google Scholar]
- Xie, L.; Cao, X.; Xu, J.; Zhang, R. UAV-Enabled Wireless Power Transfer: A Tutorial Overview. IEEE Trans. Green Commun. Netw. 2021, 5, 2042–2064. [Google Scholar] [CrossRef]
- Cho, S.; Lee, K.; Kang, B.; Koo, K.; Joe, I. Weighted Harvest-Then-Transmit: UAV-Enabled Wireless Powered Communication Networks. IEEE Access 2018, 6, 72212–72224. [Google Scholar] [CrossRef]
- Bi, S.; Ho, C.K.; Zhang, R. Wireless powered communication: Opportunities and challenges. IEEE Commun. Mag. 2015, 53, 117–125. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- Terauchi, T.; Suto, K.; Wakaiki, M. Harvest-Then-Transmit-Based TDMA Protocol with Statistical Channel State Information for Wireless Powered Sensor Networks. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021. [Google Scholar] [CrossRef]
- Park, J.; Lee, H.; Eom, S.; Lee, I. UAV-Aided Wireless Powered Communication Networks: Trajectory Optimization and Resource Allocation for Minimum Throughput Maximization. IEEE Access 2019, 7, 134978–134991. [Google Scholar] [CrossRef]
- Chen, Z.; Chi, K.; Zheng, K.; Dai, G.; Shao, Q. Minimization of Transmission Completion Time in UAV-Enabled Wireless Powered Communication Networks. IEEE Internet Things J. 2020, 7, 1245–1259. [Google Scholar] [CrossRef]
- Ozturk, M.; Nadas, J.P.B.; Klaine, P.H.V.; Hussain, S.; Imran, M.A. Clustering Based UAV Base Station Positioning for Enhanced Network Capacity. In Proceedings of the 2019 International Conference on Advances in the Emerging Computing Technologies (AECT), Al Madinah Al Munawwarah, Saudi Arabia, 10 February 2020; pp. 1–6. [Google Scholar]
- Islam, A.; Amin, A.A.; Shin, S.Y. FBI: A Federated Learning-Based Blockchain-Embedded Data Accumulation Scheme Using Drones for Internet of Things. IEEE Wirel. Commun. Lett. 2022, 11, 972–976. [Google Scholar] [CrossRef]
- Islam, A.; Rahim, T.; Masuduzzaman, M.; Young Shin, S. A Blockchain-Based Artificial Intelligence-Empowered Contagious Pandemic Situation Supervision Scheme Using Internet of Drone Things. IEEE Wirel. Commun. 2021, 28, 166–173. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Energy-Efficient and Fast MAC Protocol in UAV-Aided Wireless Sensor Networks for Time-Critical Applications. Sensors 2020, 20, 2635. [Google Scholar] [CrossRef] [PubMed]
- Xi, X.; Cao, X.; Yang, P.; Chen, J.; Quek, T.; Wu, D. Joint User Association and UAV Location Optimization for UAV-Aided Communications. IEEE Wirel. Commun. Lett. 2019, 8, 1688–1691. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Song, J.; Ou, J.; Luo, J.; Zhang, X.; Wong, K.-K. Minimum Throughput Maximization for Multi-UAV Enabled WPCN: A Deep Reinforcement Learning Method. IEEE Access 2020, 8, 9124–9132. [Google Scholar] [CrossRef]
- Xue, S.; Bi, S.; Lin, X. Energy Minimization in UAV-Aided Wireless Sensor Networks with OFDMA. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–7. [Google Scholar]
- Zhan, C.; Lai, H. Energy Minimization in Internet-of-Things System Based on Rotary-Wing UAV. IEEE Wirel. Commun. Lett. 2019, 8, 1341–1344. [Google Scholar] [CrossRef]
- Kang, J.-M.; Chun, C.-J. Joint Trajectory Design, Tx Power Allocation, and Rx Power Splitting for UAV-Enabled Multicasting SWIPT Systems. IEEE Syst. J. 2020, 14, 3740–3743. [Google Scholar] [CrossRef]
- Angeletti, P.; Lisi, M. Multimode beamforming networks for space applications. IEEE Antennas Propag. Mag. 2014, 56, 62–78. [Google Scholar] [CrossRef]
- Alsaba, Y.; Rahim, S.K.A.; Leow, C.Y. Beamforming in Wireless Energy Harvesting Communications Systems: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 1329–1360. [Google Scholar] [CrossRef]
- Izydorczyk, T.; Ginard, M.; Svendsen, S.; Berardinelli, G.; Mogensen, P. Experimental evaluation of beamforming on UAVs in cellular systems. In Proceedings of the IEEE 92nd Vehicular Technology Conference, Victoria, BC, Canada, 18 November–16 December 2020. [Google Scholar]
- Yang, S.; Deng, Y.; Tang, X.; Ding, Y.; Zhou, J. Energy Efficiency Optimization for UAV-Assisted Backscatter Communications. IEEE Commun. Lett. 2019, 23, 2041–2045. [Google Scholar] [CrossRef] [Green Version]
- Aquilina, J.P.; Farrugia, R.N.; Sant, T. On the Energy Requirements of UAVs Used for Blade Inspection in Offshore Wind Farms. In Proceedings of the 2019 Offshore Energy and Storage Summit (OSES), Brest, France, 10–12 July 2019; pp. 1–7. [Google Scholar]
- Yang, F.; Xu, W.; Zhang, Z.; Guo, L.; Lin, J. Energy Efficiency Maximization for Relay-Assisted WPCN: Joint Time Duration and Power Allocation. IEEE Access 2018, 6, 78297–78307. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2018, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Zeng, F.; Hu, Z.; Xiao, Z.; Jiang, H.; Zhou, S.; Liu, W.; Liu, D. Resource Allocation and Trajectory Optimization for QoE Provisioning in Energy-Efficient UAV-Enabled Wireless Networks. IEEE Trans. Veh. Technol. 2020, 69, 7634–7647. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the number and 3D placement of drone base stations in wireless cellular networks. In Proceedings of the IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Performance Optimization for UAV-Enabled Wireless Communications under Flight Time Constraints. In Proceedings of the GLOBECOM 2017 - 2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-Trajectory Design and Resource Allocation for Solar-Powered UAV Communication Systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef] [Green Version]
- Radhakrishnan, V.; Wu, W.; Wu, T. A Dome packing method for UAV positioning using 3D Beamforming in WPCN for water distribution network. In Proceedings of the 26th International Conference on Automation and Computing (ICAC), Portsmouth, UK, 2–4 September 2021. [Google Scholar]
- Ye, H.-T.; Kang, X.; Joung, J.; Liang, Y.-C. Optimization for Full-Duplex Rotary-Wing UAV-Enabled Wireless-Powered IoT Networks. IEEE Trans. Wireless Commun. 2020, 19, 5057–5072. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy Minimization for Wireless Communication with Rotary-Wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef] [Green Version]
- Timotheou, S.; Krikidis, I.; Zheng, G.; Ottersten, B. Beamforming for MISO Interference Channels with QoS and RF Energy Transfer. IEEE Trans. Wirel. Commun. 2014, 13, 2646–2658. [Google Scholar]
- Zhang, R.; Ho, C.K. MIMO Broadcasting for Simultaneous Wireless Information and Power Transfer. IEEE Trans. Wirel. Commun. 2013, 12, 1989–2001. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Dai, H.-N.; Wang, H.; Imran, M.; Wang, X.; Shoaib, M. UAV-enabled data acquisition scheme with directional wireless energy transfer for Internet of Things. Comput. Commun. 2020, 155, 184–196. [Google Scholar] [CrossRef]
- Wang, Z.; Wen, M.; Dang, S.; Yu, L.; Wang, Y. Trajectory design and resource allocation for UAV energy minimization in a rotary-wing UAV-enabled WPCN. Alex. Eng. J. 2021, 60, 1787–1796. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication with Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef] [Green Version]
- Hua, M.; Li, C.; Huang, Y.; Yang, L. Throughput maximization for UAV-enabled wireless power transfer in relaying system. In Proceedings of the 2017 9th International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 11–13 October 2017; pp. 1–5. [Google Scholar]
- Abdulkarim, H.A.; Alshammari, I.F. Comparisons of algorithms for solving travelling salesman problem. Int. J. Eng. Adv. Technol. 2015, 4, 76–79. [Google Scholar]
- Oliveira, T.R.; Krstić, M.; Tsubakino, D. Extremum Seeking for Static Maps with Delays. IEEE Trans. Autom. Control. 2017, 62, 1911–1926. [Google Scholar] [CrossRef]
- Lehman, B.; Weibel, S.P. Fundamental Theorems of Averaging for Functional Differential Equations. J. Differ. Equ. 1999, 152, 160–190. [Google Scholar] [CrossRef] [Green Version]
- Krstic, M.; Wang, H. Stability of Extremum Seeking Feedback for General Nonlinear Dynamic Systems. Automatica 2000, 36, 595–601. [Google Scholar] [CrossRef]
- Wu, F.; Yang, D.; Xiao, L.; Cuthbert, L. Energy Consumption and Completion Time Tradeoff in Rotary-Wing UAV Enabled WPCN. IEEE Access 2019, 7, 79617–79635. [Google Scholar] [CrossRef]
Figure 1.
Application scenario of UAV enabled WPCN in water quality monitoring.

Figure 2.
Optimization model using UAV enabled WPCN to calculate optimal position of the UAV.

Figure 3.
Optimization using extremum seeking control model to calculate optimal height.

Figure 4.
Optimized height using extremum seeking control of among the clusters.

Figure 5.
Harvested Power based on distance d with N = 24 antenna elements.

Figure 6.
Harvested Power in the GT’s based on energy and distance at time hovering for 1 s.

Figure 7.
(a,b) UAV optimized trajectory path with energy transmission and data transmission.


Figure 8.
UAV energy consumption with and without DPM.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of the Methods and their limitations.
| Method | Limitations |
|---|---|
| Optimize energy transfer using Iterative Algorithms [29,30] | Not implemented in WPCN |
| Beaming for improving uplink (WDT) [25,26] | Energy consumption of the UAV is not considered. |
| Sub gradient algorithm and bisection search method to minimize completion time [8,9] | The sensors are assumed to be on an even plane with a fixed height of the UAV and RF charging method. |
| Sum throughput maximization using convex optimization [20,34] | Energy consumption model and trajectory design are not considered. |
| Iteration algorithm using convex approximation to optimize the transmit power [13] | Achieved using complex mathematical solutions and height of the UAV is fixed. |
| Energy efficiency is optimized by power distribution, trajectory, user scheduling, and bandwidth [31] | Implemented only in a mobile communication network |
| Cell partitioning to minimize total flight time [32,33] | Not implemented in WPCN; applied in telecommunication. |
Table 2.
Parameter Table.
| Parameters | Values |
|---|---|
| Transmitting Bandwidth | 25 MHz |
| Frequency | 1.5 GHz |
| ) for GN’s | 0.7 |
| ) | 2 |
| ) | 2.5 |
| ) | 10 W |
| 0.1 W |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Radhakrishnan, V.; Wu, W. Energy Efficient Communication Design in UAV Enabled WPCN Using Dome Packing Method in Water Distribution System. Energies 2022, 15, 3844. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103844
AMA Style
Radhakrishnan V, Wu W. Energy Efficient Communication Design in UAV Enabled WPCN Using Dome Packing Method in Water Distribution System. Energies. 2022; 15(10):3844. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103844
Chicago/Turabian StyleRadhakrishnan, Varsha, and Wenyan Wu. 2022. "Energy Efficient Communication Design in UAV Enabled WPCN Using Dome Packing Method in Water Distribution System" Energies 15, no. 10: 3844. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103844
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.