
Performance Evaluation of a BESS Unit for Black Start and Seamless Islanding Operation

 ,
,  and
and
Abstract
:1. Introduction
- A novel three-mode PID controller is proposed that ensures: (1) the required active and reactive power response using the droop (P) controller, (2) the inertial response provided by the inertia emulators (D controller), which helps improve the rate of change of frequency (ROCOF), and (3) the secondary reserve provided by the secondary (integral) controllers that will adjust the active and reactive power to balance the supply and demand.
- The proposed controller performance under various grid operating conditions is evaluated during both black start and seamless transition to islanded operation. The sensitivity analyses on numerous grid operating parameters, such as pre-disturbance grid power, total installed BESS capacity, battery state of charge, unbalanced three-phase load flows, implemented power-frequency controller parameters, and distribution network types, with various shares of dynamic and static loads, are performed. These comprehensive dynamic simulations were conducted using Matlab/Simulink.
- A fast-controlled thermostatic load scheme is designed that will help improve the seamless transition performance, enabling the demand response participation.
2. Battery Energy Storage System
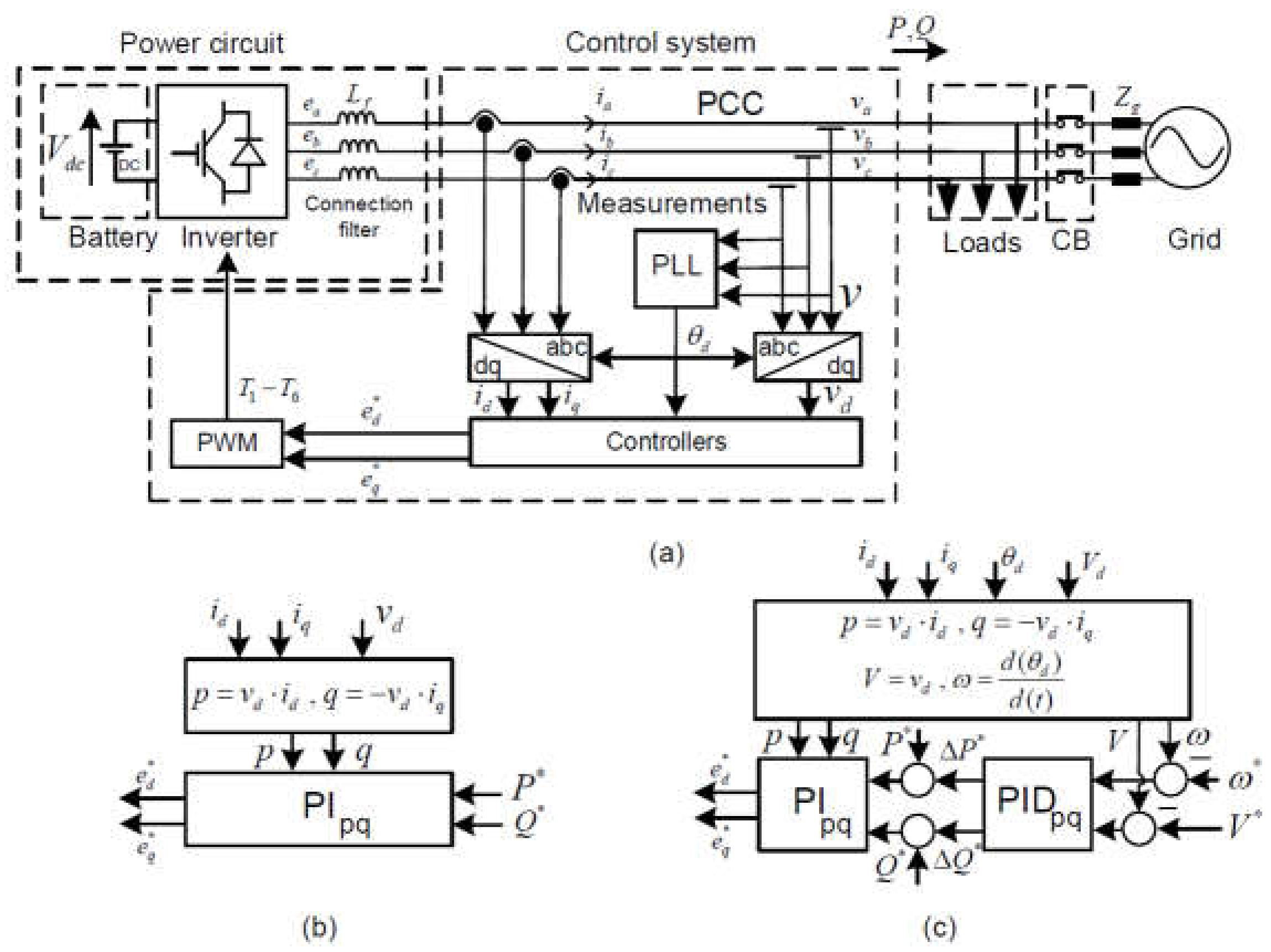
2.1. Power Circuit
2.2. Control System
3. Control System Strategies
3.1. Grid Feeding Controller
3.2. Grid Supporting Controller
- Inertia emulation controller: Since in modes II and III, the total inertia of the islanded area has a very low value, an inertial emulation controller using the frequency derivative (i.e., rate-of-change-of-frequency ROCOF) is proposed and implemented to increase the effective system inertia.
- Frequency and voltage droop controllers: The conventional frequency and voltage droop controllers are implemented using proportional controller values and , respectively. In general, droop controllers are automatically and locally activated to arrest the initial frequency drop right after a contingency event or during the seamless islanding mode within a few seconds in a decentralized manner.
- Secondary controller: The frequency and voltage secondary controllers are implemented using integral controller values and , respectively. This control is typically implemented to automatically recover the system frequency to the rated value within a few minutes in a centralized way following a contingency event or during the seamless islanding transition.
3.3. Mode Switching Controller
4. Case Studies and Simulation Scenarios
4.1. Photovoltaic Solar Cell Model
- Roof-top solar cell modules
- DC/DC boost converters
- AC/DC converter
4.2. Dynamic Loads
4.3. Grid-Connection Model
4.4. Simulation Scenarios
4.4.1. Simulation Scenarios for Seamless Transition to Islanding
- Scenario A1: Different grid disturbance power values
- Scenario A2: Different shares of dynamic and static loads with respect to the residential, industrial, and commercial areas
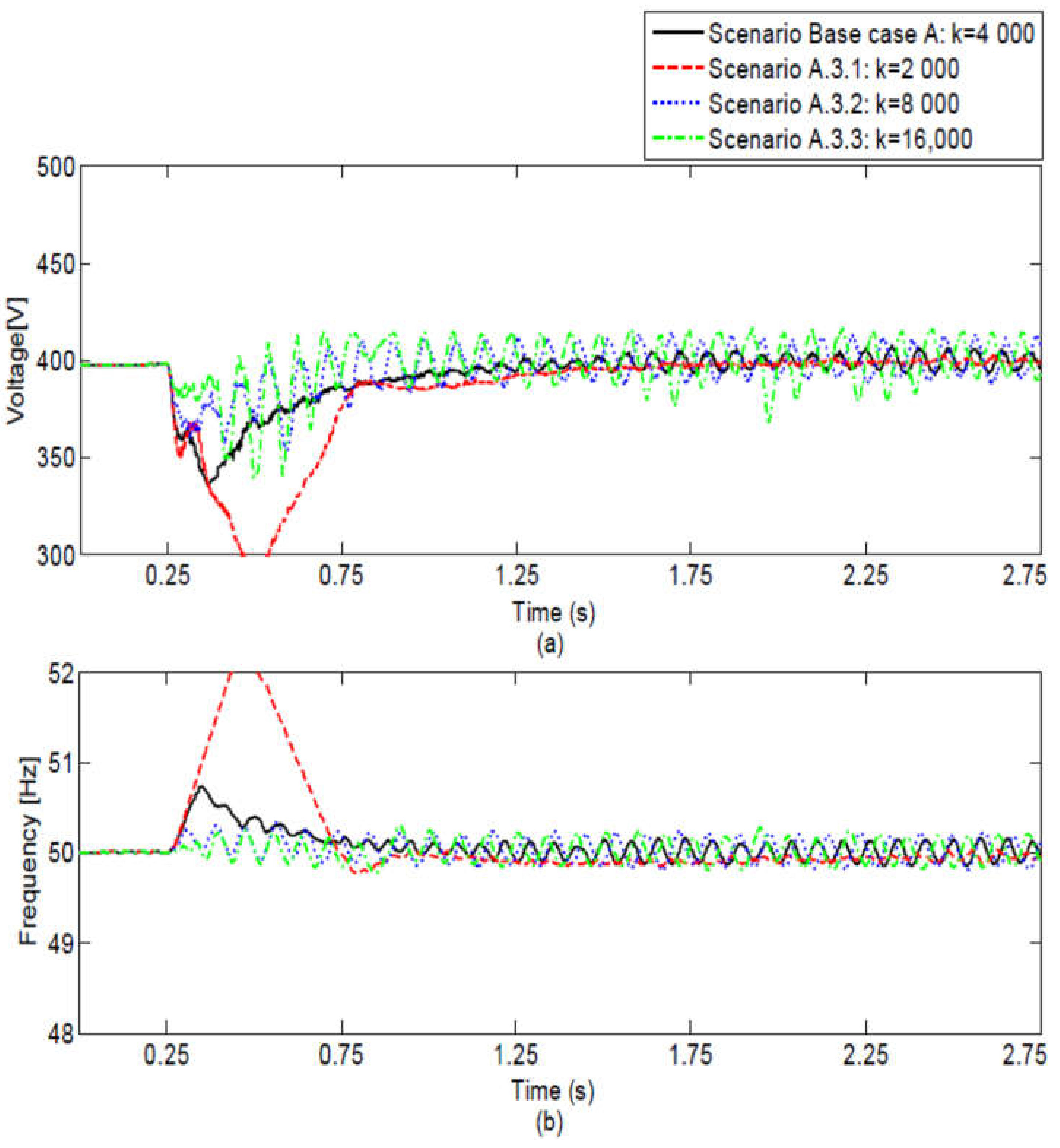
- Scenario A3: Different secondary PI controller values
- Scenario A4: Fast controlled thermostatic load scheme
4.4.2. Simulation Scenarios B1 and B2 for the “black Start” Mode
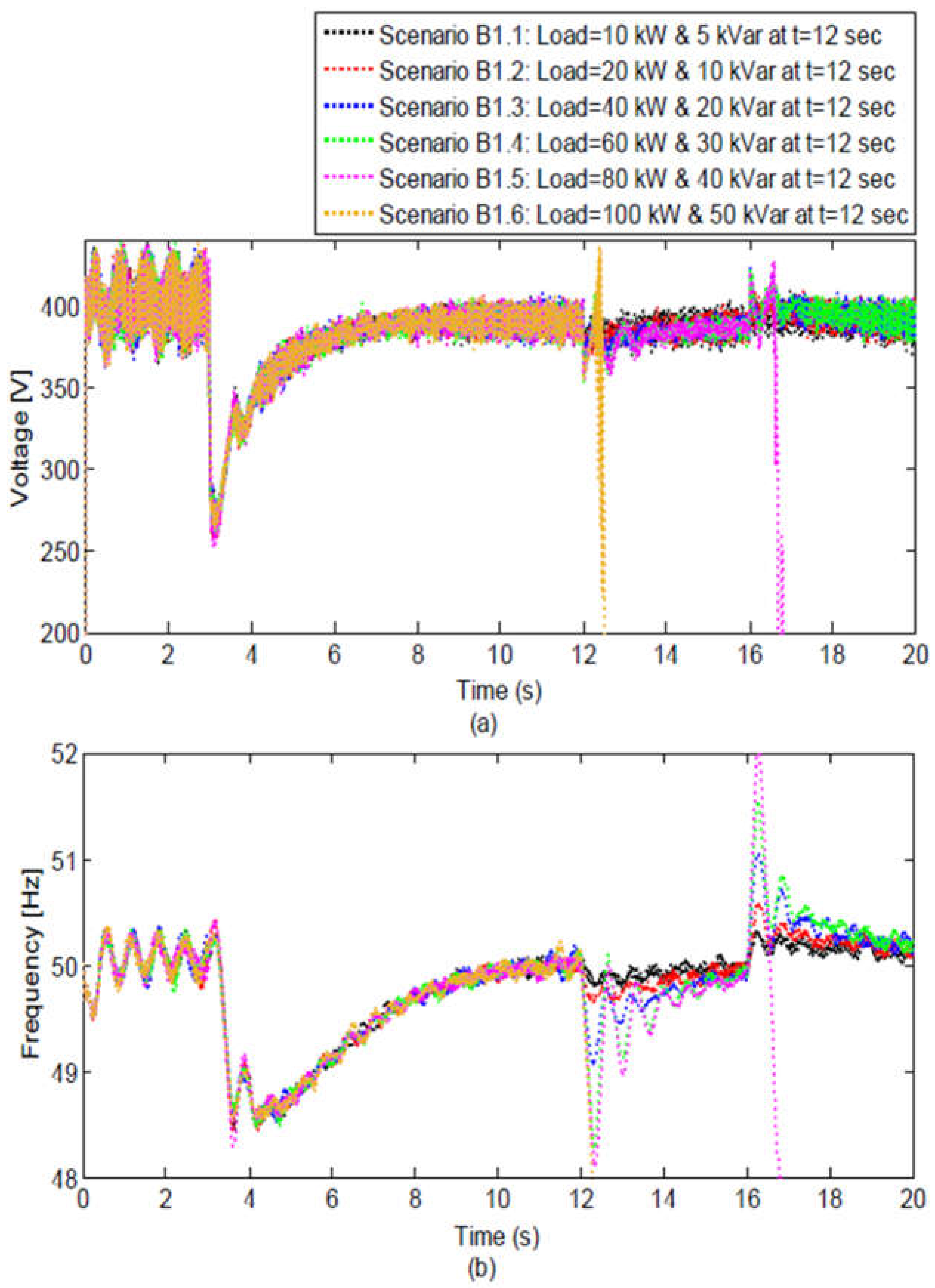
- Case study B1 for “black start” mode: In order to evaluate the BESS performance for picking up different units during the “black start” mode, case study B1 is defined and presented in Figure 5a. At the start point, how much constant impedance load 1 can be picked up by the BESS unit will be evaluated. Then at Point 1, an induction machine is connected to the grid, and later on, at Point 2, constant impedance load 2 is connected. Finally, at Point 3, a PV unit, which is modeled as a negative load equal to the constant impedance load 2, is connected to the grid. Thus, with this chronological order, we can evaluate the BESS unit performance during the “black start” mode for different types of units. In the simulation scenarios, the constant impedance load is picked up at t = 12 s, and then the PV unit is connected at t = 16 s.
- Case study B2 for “black start” mode: In order to evaluate the BESS performance when a large number of loads and PV units are picked up, case study B2 is defined and presented in Figure 5b. At the start point, constant impedance load 1 is picked up by the BESS unit. Then, at Point 1, an induction machine is connected to the grid, and later on at Points 2, 3, and 4, constant impedance loads 2, 3, and 4 are connected, respectively. Finally, at Points 5, 6, and 7, PV units, which are modeled as negative loads equal to constant impedance loads 2, 3, and 4 are connected to the grid. Thus, with this chronological order, we can evaluate the BESS unit performance during the “black start” mode, when a large number of units are connected to the grid. Note that for the black start mode, the size of the PV units was considered the same as the size of the constant impedance loads where the PV units have a value for their reactive power. Though in practice, the PV units have a relatively low value of reactive power. The simulation results for the black start mode remain intact and valid in the case that the reactive power of the PV units is set to zero as well.
5. Simulation Results and Discussion
5.1. Simulation Results of Islanding Operation Scenarios
5.1.1. Simulation Results of Scenario A1 for Different Grid Power Values
5.1.2. Simulation Results of Scenario A2 for Different Shares of Dynamic and Static Loads
5.1.3. Simulation Results of Scenario A3 for Different Secondary Controller Gain Values
5.1.4. Simulation Results of Scenario A4 for Demand Response (Fast Controlled Dummy Load)
5.2. Simulation Results of “Black Start” Mode Scenarios
5.2.1. Simulation Results of Scenario B1 for Picking up Different Types of Units
5.2.2. Simulation Results of Scenario B2 for Picking up a Large Number of Units
5.3. Discussion
- Grid power disturbance: It was observed in the simulations that the BESS unit had the large capability to control the island for the high values of grid power disturbance, e.g., 0.4 pu. Despite this, for the very high values of grid power disturbance, e.g., 0.8 pu, the battery storage unit was not able to adequately control the island. Moreover, the power variation of the BESS unit did not necessarily have the same value for the upward or downward reserves.
- Share of dynamic loads, such as induction machines: The dynamic loads, such as induction machines, were able to largely increase the island’s inertial response. As a result, the performance of the BESS unit was notably improved when the share of the induction machines increased in the islanded area. By the way, it was noted that the newly installed induction machines, which are typically connected to the grid using the power electronic converters, are able to considerably deteriorate the inertial contribution of the induction machines to the grid.
- Secondary controller gain: The gain of the secondary controller undoubtedly had a large impact on the BESS unit’s performance. While the very low values of the controller gains could result in poor performance of the battery storage unit, the use of very large values for the controller gains could also lead to the steady-state high-magnitude high-frequency voltage and frequency oscillations in the islanded area. As the use of both large and low values could make the islanded area unstable, for the islanding operation, the gains of the secondary controller shall be tuned and carefully adjusted.
- Initial set points of the BESS unit before islanding: If before the islanding, the set points of the battery storage unit were close to the maximum or minimum limits for the power, the performance of the BESS unit could be largely decreased, and as a result, the area could be shut down. Therefore, it is strongly suggested that the initial set points of the battery storage unit would be carefully adjusted such that the battery storage system has enough upward or downward reserves of power during the islanding operation
- BESS unit power: Taking into account the previous point, i.e., point A. 4, if the size of the battery storage unit (in kW) also had a very low value, then the battery storage unit had limited capabilities to control the frequency and voltage within the allowable limits. Hence, we also recommend that the size of the battery storage unit is carefully selected and defined, taking into account the power disturbance of the grid, total consumption of the loads, and the power production of the PV units in the islanded area.
- Demand response, such as fast load control, in the area: Fast controlled dummy load had a significant potential to help the battery storage unit successfully stabilize the area, whereas the area shut down without the fast dummy load control.
- Type of loads connected: According to the simulations, the dynamic loads, such as induction machines, could have a very large inrush current that significantly reduced both frequency and voltage during the “black start” mode. However, if the size of the load consumption remains the same, the battery storage system had better performance for constant impedance loads in comparison to the induction machine loads. Finally, it was indicated that the newly installed induction machines are typically connected to the grid via the power electronic converters. This helps the high-amplitude inrush currents be avoided after their connection to the islanded area. In these cases, the induction machines using the power electronic converters can be modeled as constant power loads (and not as dynamic loads).
- Size of the loads connected to the area: It is obvious that the feasibility of a successful “black start” mode is mainly dependent on the connected load size in the islanded area. In general, the BESS unit had a large capability to pick up large loads, such as 0.32 pu.
- PV unit’s size: Despite the fact that, in practice, the PV units are gradually connected to the area under controlled and monitored conditions with a very slow rate, the performance of the battery storage system was very acceptable even for the case that the PV units with 0.08 pu are suddenly connected to the area.
- Type of secondary controller: Next to the conventional PI controllers used for the secondary controller, the derivative (D) controllers were added to the secondary controllers to notably improve the capability of the BESS unit for the “black start” mode. In fact, as the total response of the inertia in the area is relatively low during the black start mode, the derivative controllers are able to effectively emulate and improve the inertial response of the islanded area and, consequently, help suppress the high-voltage and frequency deviations during the load pick up process.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, B.; Dong, X.; Bornemann, J. Service Restoration for a Renewable-Powered Microgrid in Unscheduled Island Mode. IEEE Trans. Smart Grid 2015, 6, 1128–1136. [Google Scholar] [CrossRef]
- Penaloza, J.D.R.; Adu, J.A.; Borghetti, A.; Napolitano, F.; Tossani, F.; Nucci, C.A. A Power Control Scheme for the Islanding Transition of a Microgrid with Battery Energy Storage Systems. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–6. [Google Scholar]
- Chen, M.; Rincon-Mora, G. Accurate electrical battery model capable of predicting runtime and I–V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P. An Aggregate Model of Plug-In Electric Vehicles for Primary Frequency Control. IEEE Trans. Power Syst. 2015, 30, 1475–1482. [Google Scholar] [CrossRef]
- Lee, S.-J.; Kim, J.-H.; Kim, C.-H.; Kim, S.-K.; Kim, E.-S.; Kim, D.-U.; Mehmood, K.; Khan, S. Coordinated Control Algorithm for Distributed Battery Energy Storage Systems for Mitigating Voltage and Frequency Deviations. IEEE Trans. Smart Grid 2015, 7, 1713–1722. [Google Scholar] [CrossRef]
- Mercier, P.; Cherkaoui, R.; Oudalov, A. Optimizing a Battery Energy Storage System for Frequency Control Application in an Isolated Power System. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar] [CrossRef]
- Wade, N.S.; Taylor, P.C.; Lang, P.D.; Jones, P.R. Evaluating the benefits of an electrical energy storage system in a future smart grid. Energy Policy 2010, 38, 7180–7188. [Google Scholar] [CrossRef] [Green Version]
- Serban, I.; Marinescu, C. Control Strategy of Three-Phase Battery Energy Storage Systems for Frequency Support in Microgrids and with Uninterrupted Supply of Local Loads. IEEE Trans. Power Electron. 2014, 29, 5010–5020. [Google Scholar] [CrossRef]
- Serban, I.; Marinescu, C. An enhanced three-phase battery energy storage system for frequency control in microgrids. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 912–918. [Google Scholar]
- Pilehvar, M.S.; Mirafzal, B. A Frequency Control Method for Islanded Microgrids Using Energy Storage Systems. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 2327–2332. [Google Scholar] [CrossRef]
- Dong, D.; Wang, P.; Qin, W.; Han, X. Investigation of a microgrid with vanadium redox flow battery storages as a black start source for power system restoration. In Proceedings of the 2014 IEEE 9th Conference on Industrial Electronics and Applications (ICIEA), Hangzhou, China, 9–11 June 2014; pp. 140–145. [Google Scholar]
- Li, J.; Ma, X.-Y.; Liu, C.-C.; Schneider, K. Distribution System Restoration With Microgrids Using Spanning Tree Search. IEEE Trans. Power Syst. 2014, 29, 3021–3029. [Google Scholar] [CrossRef]
- Nguyen, C.; Flueck, A. Agent Based Restoration With Distributed Energy Storage Support in Smart Grids. IEEE Trans. Smart Grid 2012, 3, 1029–1038. [Google Scholar] [CrossRef]
- Kwon, J.; Yoon, S.; Choi, S. Indirect current control for seamless transfer of three-phase utility interactive inverters. IEEE Trans. Power Electron. 2012, 27, 773–781. [Google Scholar] [CrossRef]
- Ryan, D.J.; Razzaghi, R.; Torresan, H.D.; Karimi, A.; Bahrani, B. Grid-Supporting Battery Energy Storage Systems in Islanded Microgrids: A Data-Driven Control Approach. IEEE Trans. Sustain. Energy 2021, 12, 834–846. [Google Scholar] [CrossRef]
- Ashabani, S.; Mohamed, Y. A Flexible Control Strategy for Grid-Connected and Islanded Microgrids with Enhanced Stability Using Nonlinear Microgrid Stabilizer. IEEE Trans. Smart Grid 2012, 3, 1291–1301. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An Intelligent Droop Control for Simultaneous Voltage and Frequency Regulation in Islanded Microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Jiang, Q.; Xue, M.; Geng, G. Energy Management of Microgrid in Grid-Connected and Stand-Alone Modes. IEEE Trans. Power Syst. 2013, 28, 3380–3389. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, M.; Lehn, P. Micro-grid autonomous operation during and subsequent to islanding process. IEEE Trans. Power Deliv. 2005, 20, 248–257. [Google Scholar] [CrossRef]
- Meegahapola, L.; Robinson, D.; Agalgaonkar, A.; Perera, S.; Ciufo, P. Microgrids of Commercial Buildings: Strategies to Manage Mode Transfer from Grid Connected to Islanded Mode. IEEE Trans. Sustain. Energy 2014, 5, 1337–1347. [Google Scholar] [CrossRef]
- Neves, A.; Falcão, A.; Louro, M.; Terras, J.M.; Almeida, B.; Veríssimo, M.; Pinto, J.F.; Damásio, J. Two Years of Battery Energy Storage System performance in automatic islanding in the Portuguese MV network. AIM, Jun. 2019. [Online]. Available online: https://www.cired-repository.org/handle/20.500.12455/272 (accessed on 22 February 2022).
- Moreira, C.; Resende, F.; Lopes, J.P. Using Low Voltage Micro- Grids for Service Restoration. IEEE Trans. Power Syst. 2007, 22, 395–403. [Google Scholar] [CrossRef] [Green Version]
- Olivares, D.; Mehrizi-Sani, A.; Etemadi, A.; Canizares, C.; Iravani, R.; Kazerani, M.; Hajimiragha, A.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Sebastián, R.; Alzola, R.P. Simulation of an isolated Wind Diesel System with battery energy storage. Electr. Power Syst. Res. 2011, 81, 677–686. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.; Vasquez, J. Distributed Secondary Control for Islanded Microgrids—A Novel Approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef] [Green Version]
- Tephiruk, N.; Kanokbannakorn, W.; Kerdphol, T.; Mitani, Y.; Hongesombut, K. Fuzzy logic control of a battery energy storage system for stability improvement in an islanded microgrid. Sustainability 2018, 10, 1645. [Google Scholar] [CrossRef] [Green Version]
- Worku, M.Y.; Hassan, M.A.; Abido, M.A. Real time energy management and control of renewable energy based microgrid in grid connected and island modes. Energies 2019, 12, 276. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Capacity in KVA | |
|---|---|
| BESS | 264 |
| PV unit 1 | 200 |
| PV unit 2 | 140 |
| PV unit 3 | 90 |
| Load 1 | Static 90 KVA + dynamic 40 KVA |
| Load 2 | Static 224 KVA + dynamic 40 KVA |
| Load 3 | Static 90 KVA + dynamic 40 KVA |
| Fast controlled load | 100 (one 50, two 20, and one 10 KVA) |
| Controller Parameter | Islanding Operating | Black Start | |
|---|---|---|---|
| Power and current controllers | |||
| 2 × Power PI controller | P | 4.5 | 4.5 |
| I | 30 | 30 | |
| Primary and secondary controllers | |||
| 3 × Frequency-active power PID | P | 108,000 = 27 × 4000 | 15,000 |
| I | 400,000 = 100 × 4000 | 11,250 | |
| D | 0 | 1050 | |
| 3 × Voltage-reactive power PID | P | 2560 = 0.64 × 4000 | 28.8 |
| I | 24,000 = 6 × 4000 | 144 | |
| D | 0 | 0.96 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Izadkhast, S.; Cossent, R.; Frías, P.; García-González, P.; Rodríguez-Calvo, A. Performance Evaluation of a BESS Unit for Black Start and Seamless Islanding Operation. Energies 2022, 15, 1736. https://0-doi-org.brum.beds.ac.uk/10.3390/en15051736
Izadkhast S, Cossent R, Frías P, García-González P, Rodríguez-Calvo A. Performance Evaluation of a BESS Unit for Black Start and Seamless Islanding Operation. Energies. 2022; 15(5):1736. https://0-doi-org.brum.beds.ac.uk/10.3390/en15051736
Chicago/Turabian StyleIzadkhast, Seyedmahdi, Rafael Cossent, Pablo Frías, Pablo García-González, and Andrea Rodríguez-Calvo. 2022. "Performance Evaluation of a BESS Unit for Black Start and Seamless Islanding Operation" Energies 15, no. 5: 1736. https://0-doi-org.brum.beds.ac.uk/10.3390/en15051736