
A Comparative Study and Optimization of Switching Functions for Sliding-Mode Observer in Sensorless Control of PMSM †

 ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
- Methods for medium- and high-speed drives. They work reliably for speeds above 10% of the rated drive speed.
- Methods for low-speed drives. The low-speed operation is often considered as speeds below 10% of the rated speed.
- Hybrid sensorless control methods for the whole speed range. They are a combination of low- and high-speed methods.
- Systematic classification of different types of switching functions;
- Design and experimental verification of a second-order SMO (SOSMO) with phase-locked loop (PLL);
- Experimental verification of different switching functions with the proposed SOSMO;
- Statistical evaluation of a large set of measurements to find the optimal values of SC.
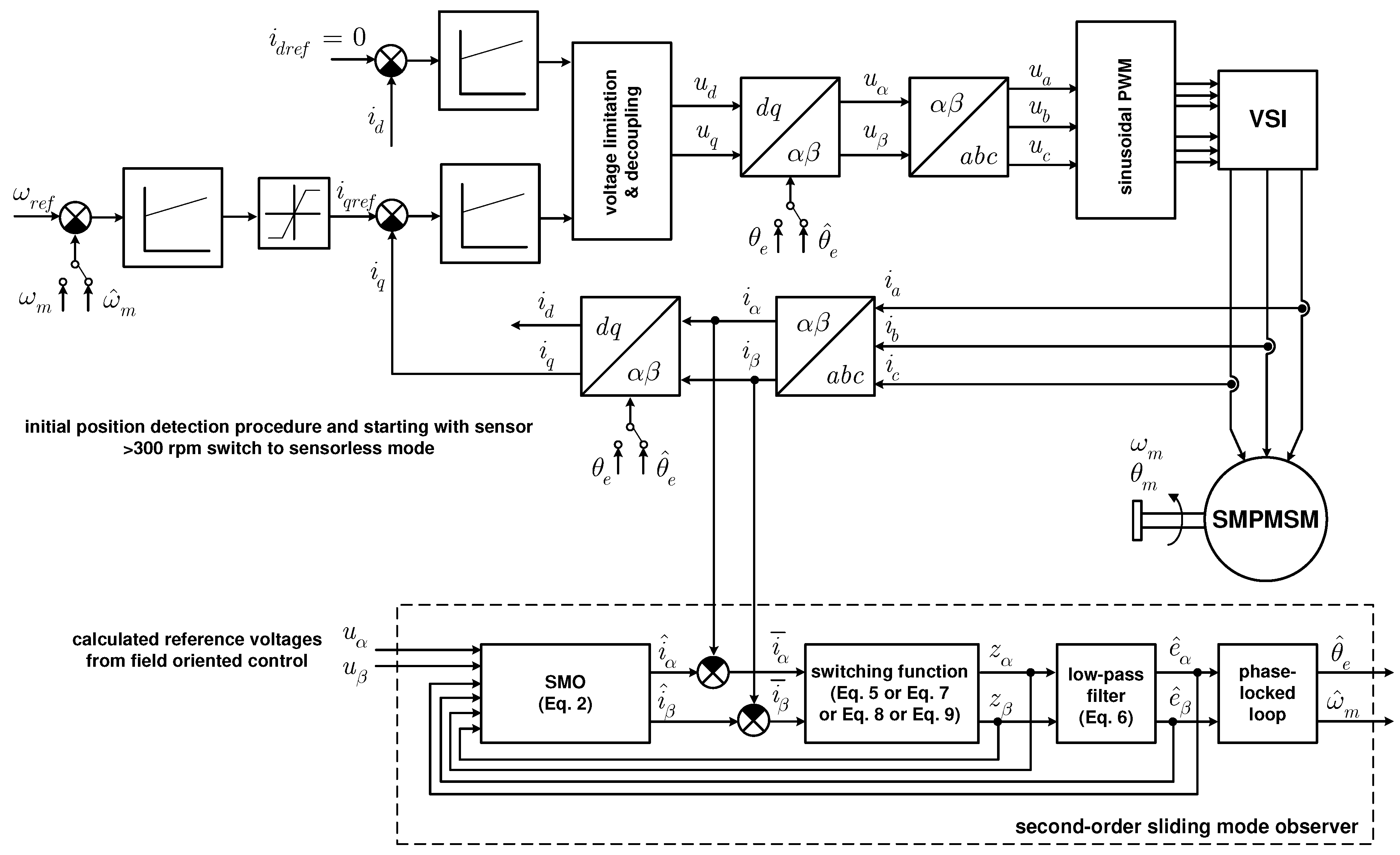
2. Implementation of SOSMO for Sensorless Control of PMSM
3. Classification of Switching Functions
3.1. Signum Function
3.2. Saturation Function
3.3. Sigmoid Function
3.4. Hyperbolic Function
3.5. Feedback Switching Gain
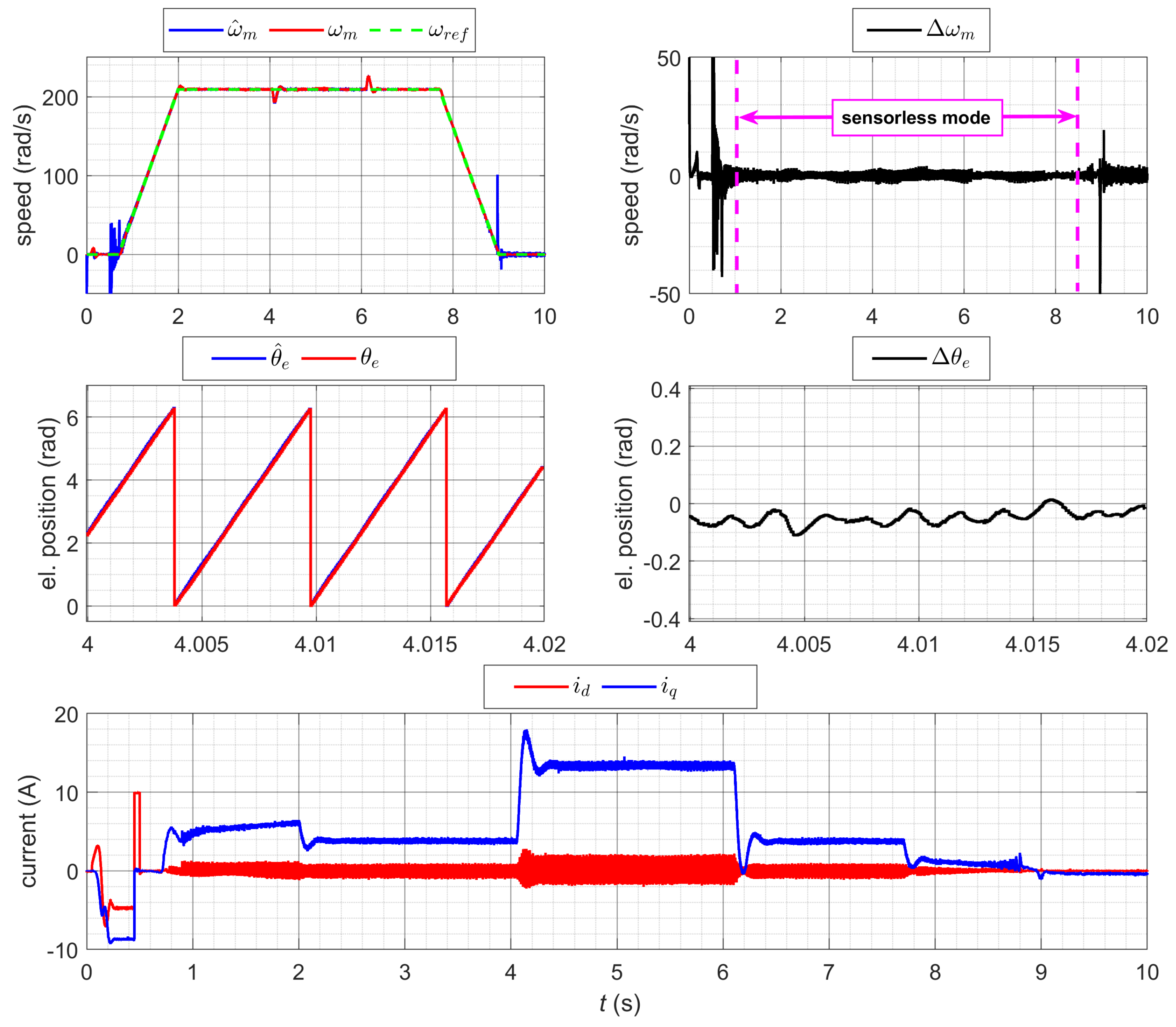
4. Experimental Results of Different Switching Functions in Sensorless Control
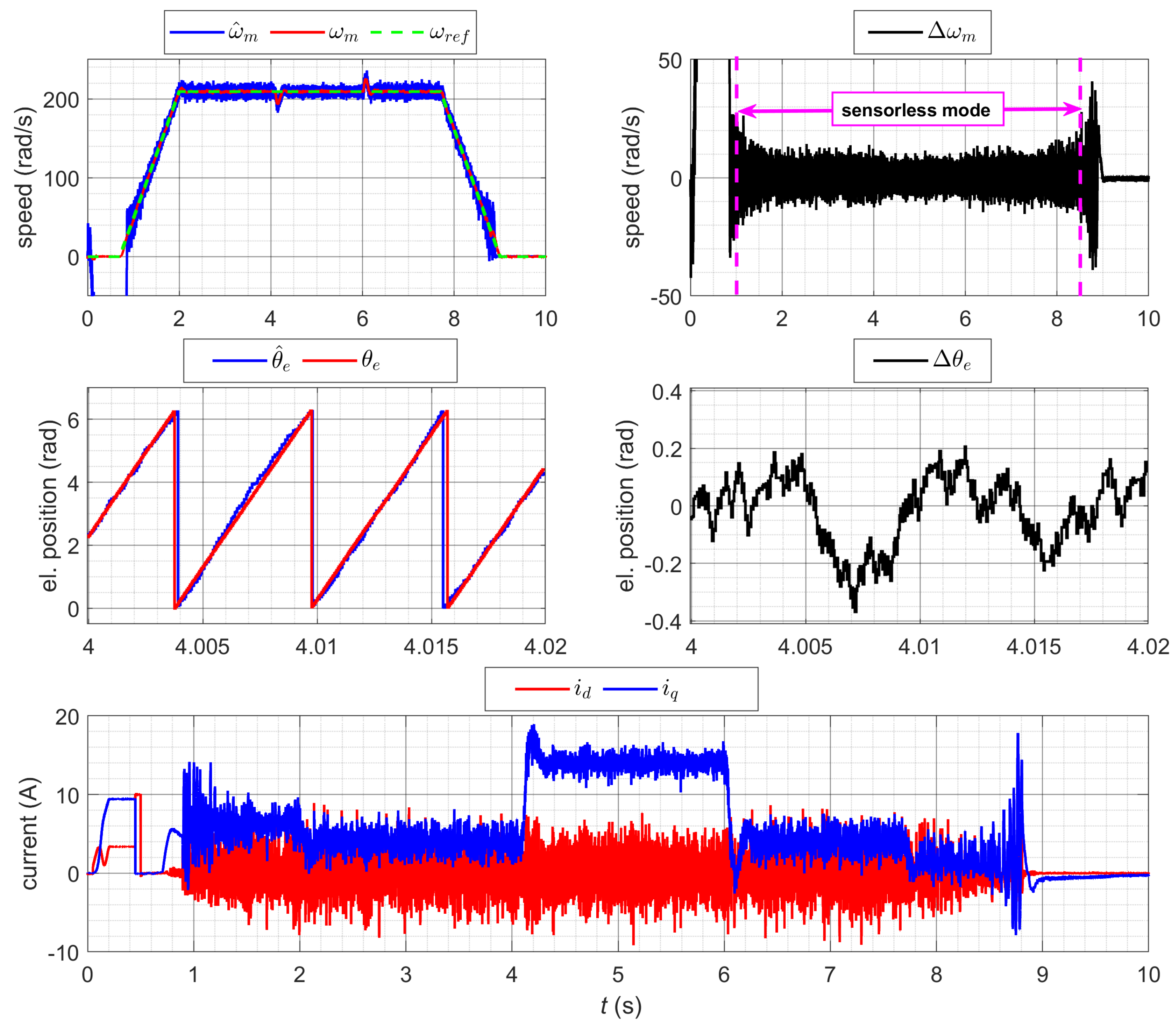
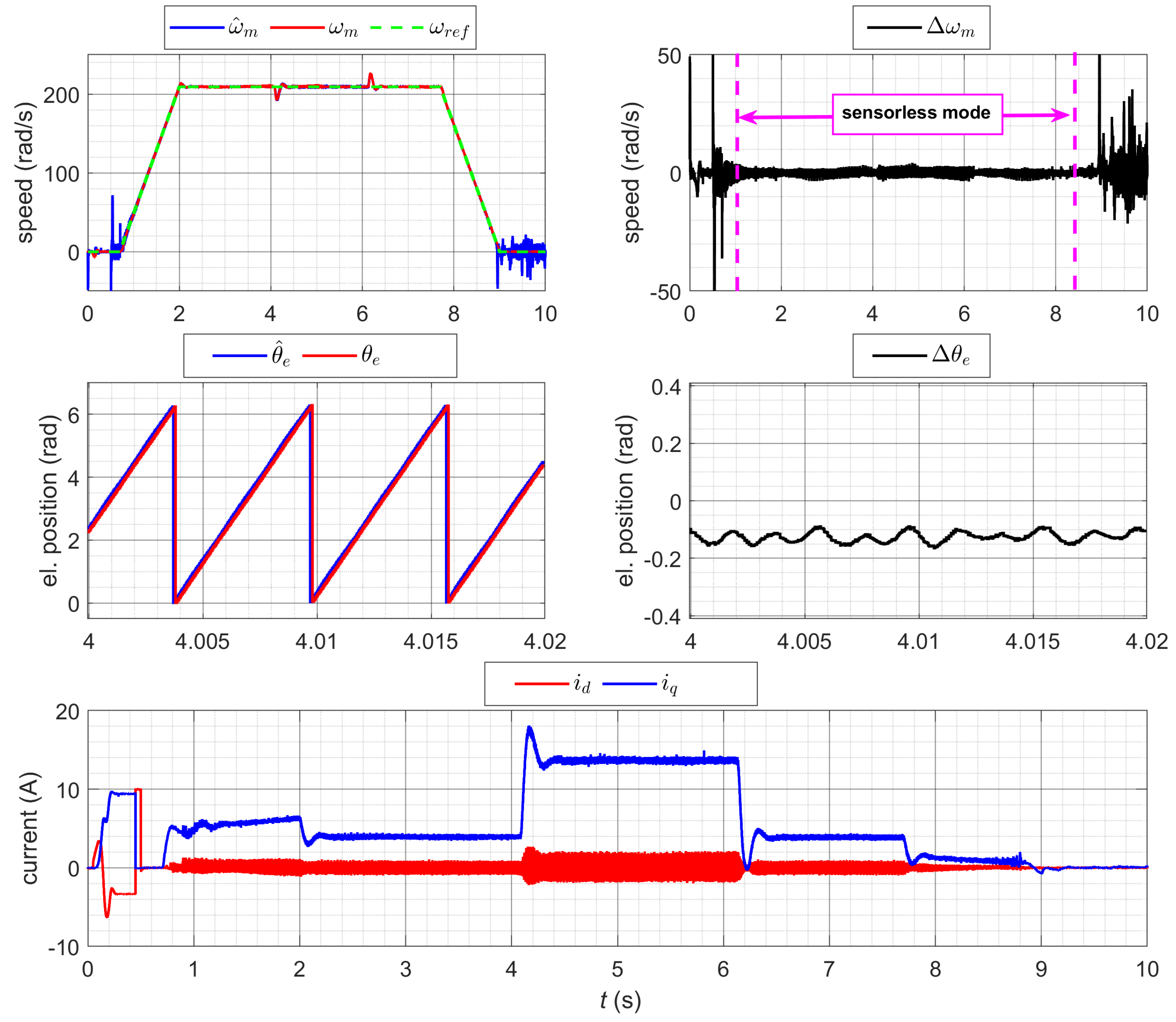
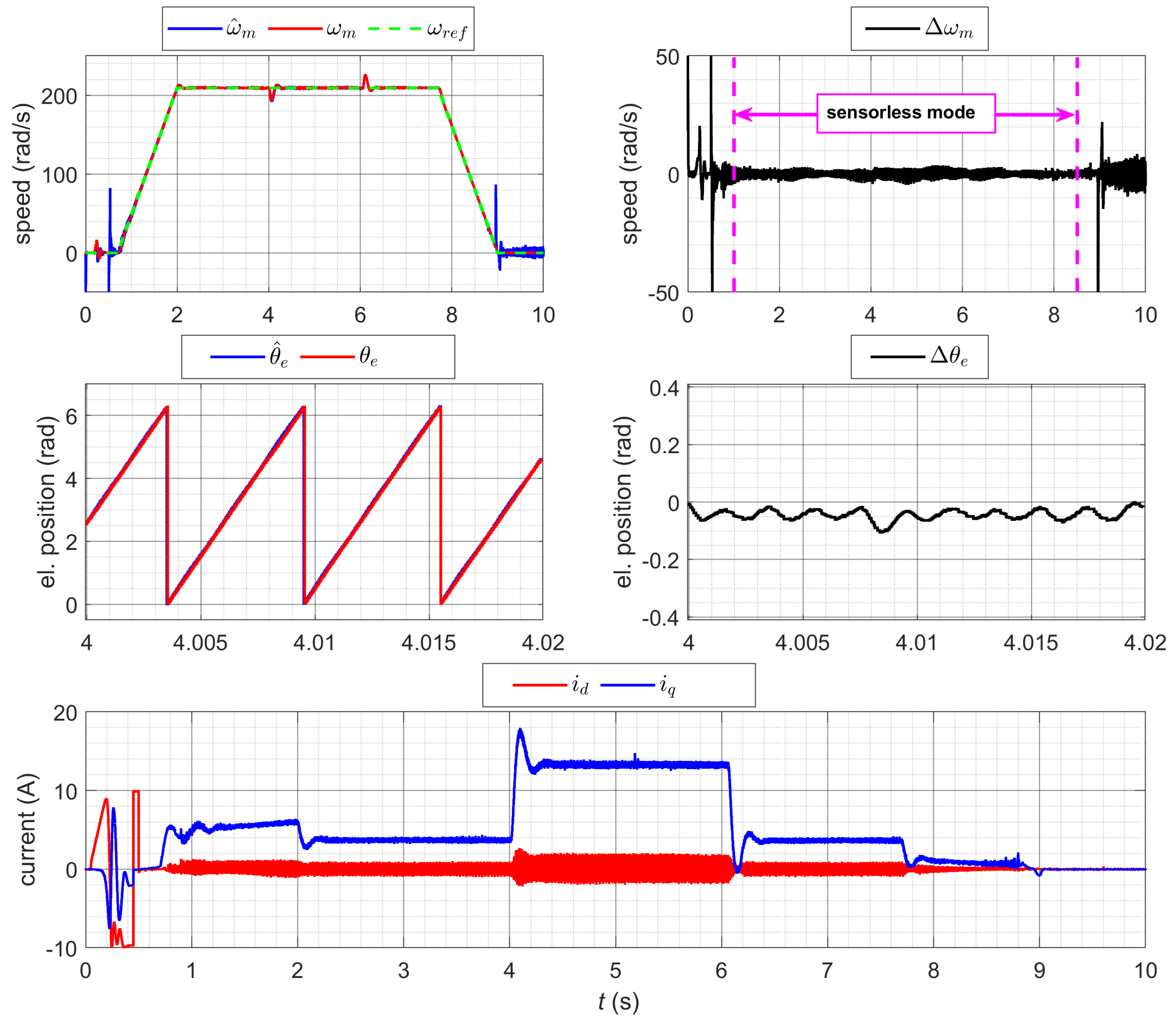
- The upper left picture shows the actual and estimated speeds throughout the experiment;
- The upper right picture shows the calculated speed error and indicates the sensorless operation area;
- The middle left picture shows a detail of the actual and estimated electrical position to see how accurate the position estimation is;
- The middle right picture shows a detail of the calculated electrical position error ;
- The bottom picture shows the values of the actual and currents from the field oriented control.
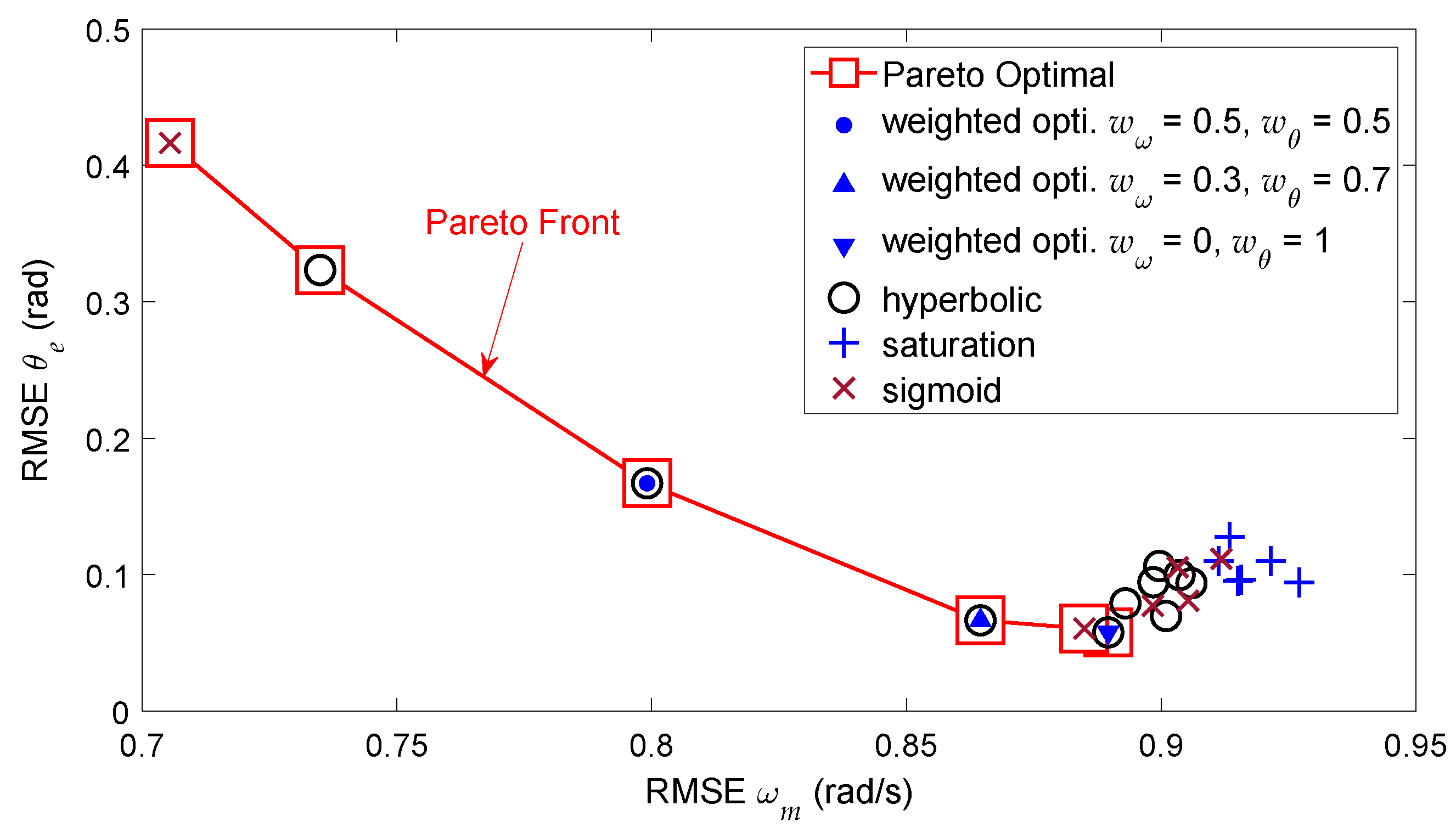
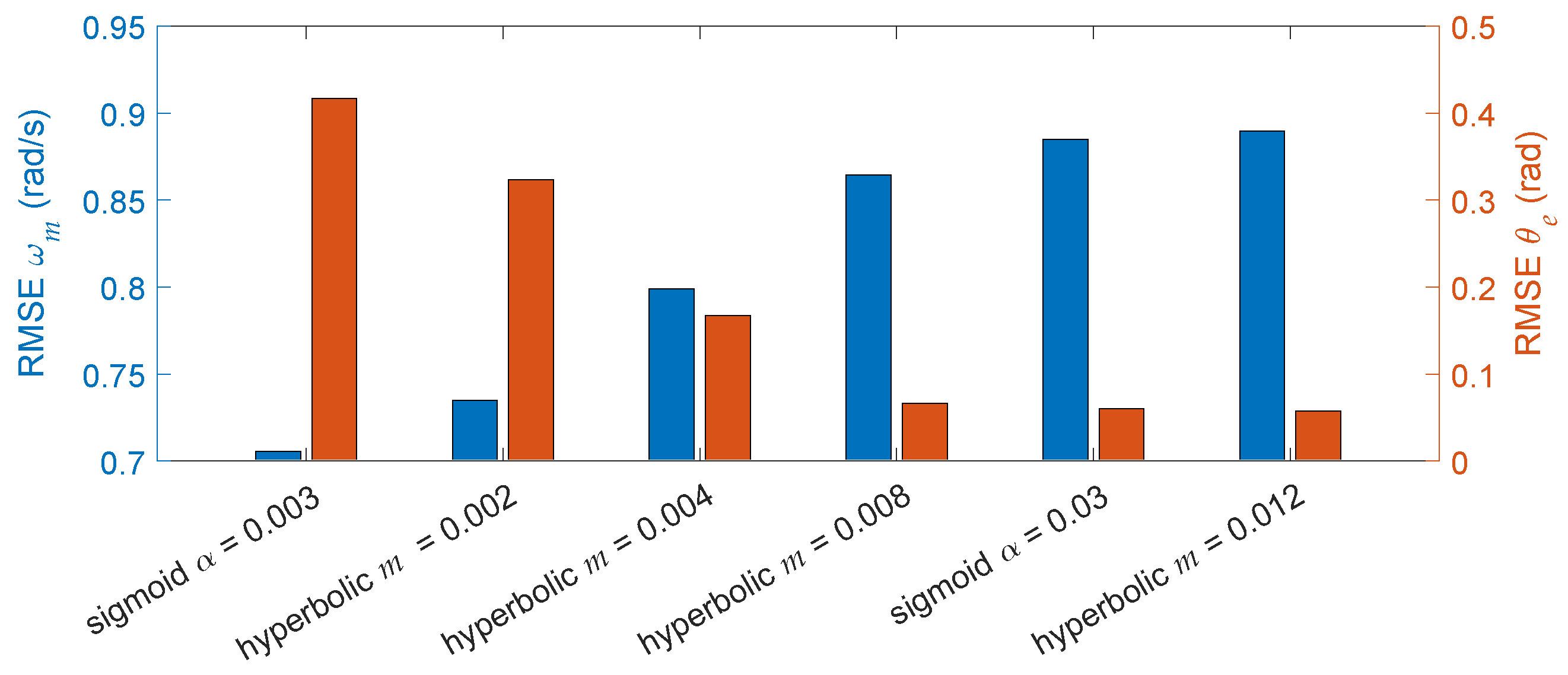
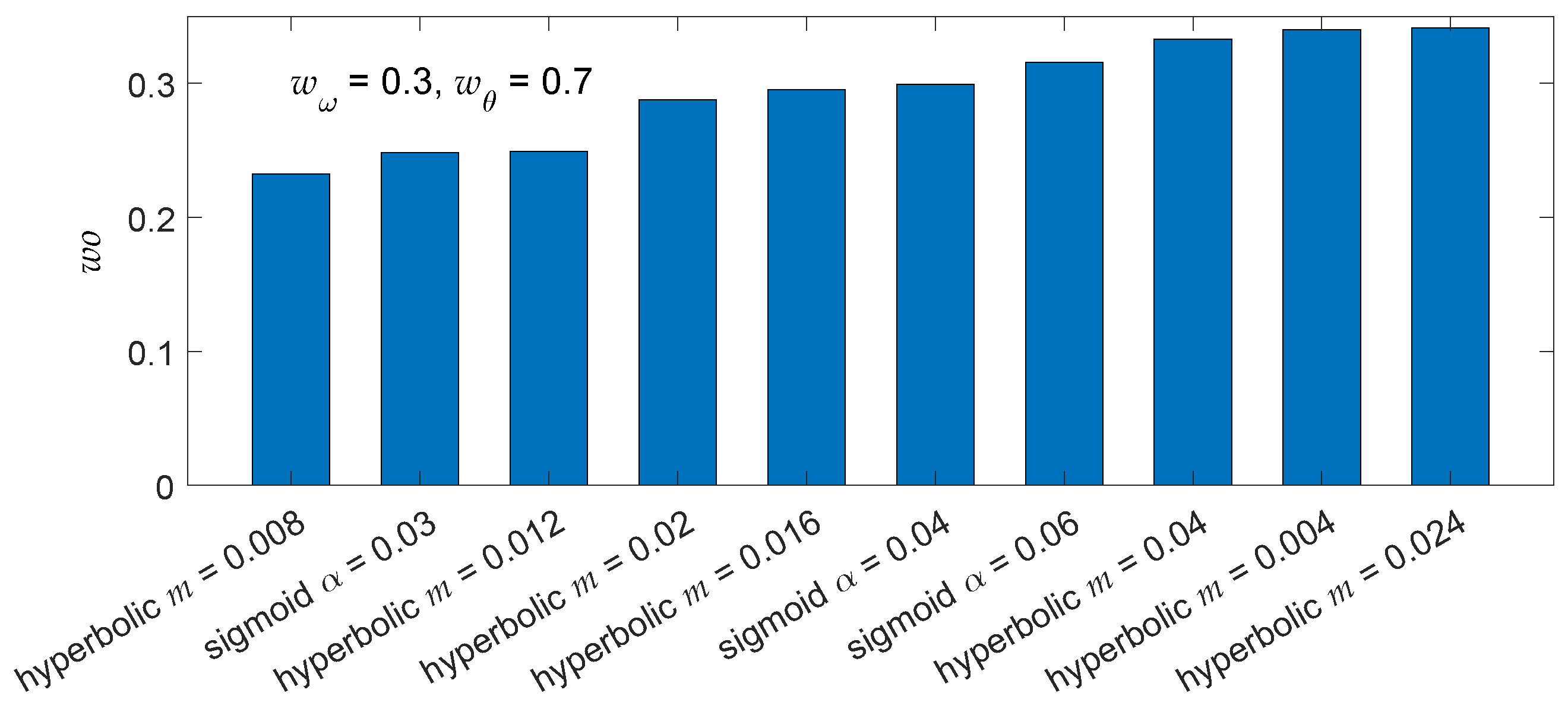
5. Multiobjective Optimization Problem for Values of SC
- The signum function gives the worst values of objective functions and serves only as a reference point.
- The solutions from the group of hyperbolic and sigmoid functions dominate over those of the saturation function.
- Multiobjective optimization gives several “good” solutions, so it is necessary to use additional preferences to select the best one.
- The optimal solutions according to the weighted objective lie on the Pareto front.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EMF | electromotive force |
| FO | flux observer |
| FOC | field oriented control |
| HOSMO | higher-order sliding mode observer |
| IM-PMSM | interior-mounted permanent magnet synchronous machine |
| LO | Luenberger observer |
| LPF | low-pass filter |
| MCDM | multiple-criteria decision-making |
| MOO | multiobjective optimization |
| MRAS | model reference adaptive system |
| PLL | phase-locked loop |
| PMSM | permanent magnet synchronous machine |
| RMSE | root-mean-square error |
| SC | shaping coefficient |
| SM-PMSM | surface-mounted permanent magnet synchronous machine |
| SMO | sliding mode observer |
| SOSMO | second-order sliding-mode observer |
| STSMO | super-twisting sliding-mode observer |
| VSI | voltage-source inverter |
References
- Wang, G.; Guoqiang, Z.; Xu, D. Position Sensorless Control Techniques for Permanent Magnet Synchronous Machine Drives; Springer Nature: Singapore, 2020. [Google Scholar]
- Wang, M.S.; Tsai, T.M. Sliding Mode and Neural Network Control of Sensorless PMSM Controlled System for Power Consumption and Performance Improvement. Energies 2017, 10, 1780. [Google Scholar] [CrossRef] [Green Version]
- Infineon Technologies AG. XC886/888 CM/CLM 8-Bit Flash Microcontroller Sensorless Field Oriented Control for PMSM Motors, AP08059, Edition 2007-05. Available online: https://www.infineon.com/dgdl/AP0805910_Sensorless_FOC.pdf?fileId=db3a3043134dde6001134e2c3cff002f (accessed on 26 October 2021).
- Cacciato, M.; Scarcella, G.; Scelba, G.; Bille, S.; Costanzo, D.; Cucuccio, A. Comparison of low-cost-implementation sensorless schemes in vector controlled adjustable speed drives. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 11–13 June 2008; pp. 1082–1087. [Google Scholar] [CrossRef]
- Microchip Technology. Sensorless FOC for PMSM Using Reduced Order Luenberger Observer AN2590. Available online: https://www.microchip.com/content/dam/mchp/documents/OTH/ApplicationNotes/ApplicationNotes/00002590B.pdf (accessed on 13 October 2021).
- Tursini, M.; Scafati, A.; Guerriero, A.; Petrella, R. Extended Torque-Speed Region Sensor-Less Control of Interior Permanent Magnet Synchronous Motors. In Proceedings of the International Aegean Conference on Electrical Machines and Power Electronics, Bodrum, Turkey, 10–12 September 2007; pp. 647–652. [Google Scholar] [CrossRef]
- Kivanc, O.C.; Ozturk, S.B. Sensorless PMSM Drive Based on Stator Feedforward Voltage Estimation Improved with MRAS Multiparameter Estimation. IEEE/ASME Trans. Mechatron. 2018, 23, 1326–1337. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Eltamaly, A.M.; Alsaud, M.S.; Sayed, K.; Alghamdi, A.S. Sensorless control for PMSM using model reference adaptive system. Int. Trans. Electr. Energy Syst. 2021, 31, e12733. [Google Scholar] [CrossRef]
- Bolognani, S.; Oboe, R.; Zigliotto, M. Sensorless full-digital PMSM drive with EKF estimation of speed and rotor position. IEEE Trans. Ind. Electron. 1999, 46, 184–191. [Google Scholar] [CrossRef]
- Dilys, J.; Stankevič, V.; Łuksza, K. Implementation of Extended Kalman Filter with Optimized Execution Time for Sensorless Control of a PMSM Using ARM Cortex-M3 Microcontroller. Energies 2021, 14, 3491. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; Xu, X.; Sun, X.; Zhao, J. Rotor Position Estimation Approaches for Sensorless Control of Permanent Magnet Traction Motor in Electric Vehicles: A Review. World Electr. Veh. J. 2021, 12, 9. [Google Scholar] [CrossRef]
- Filho, C.J.V.; Xiao, D.; Vieira, R.P.; Emadi, A. Observers for High-Speed Sensorless PMSM Drives: Design Methods, Tuning Challenges and Future Trends. IEEE Access 2021, 9, 56397–56415. [Google Scholar] [CrossRef]
- Kung, Y.; Risfendra, R.; Lin, Y.; Huang, L. FPGA-realization of a sensorless speed controller for PMSM drives using novel sliding mode observer. Microsyst. Technol. 2016, 24, 79–93. [Google Scholar] [CrossRef]
- Bilal, A.; Manish, B. Sensorless Field Oriented Control of 3-Phase Permanent Magnet Synchronous Motors, Application Report SPRABQ3. 2013. Available online: https://www.ti.com/lit/an/sprabq3/sprabq3.pdf (accessed on 26 October 2021).
- Zambada, J.; Deb, D. Sensorless Field Oriented Control of a PMSM, AN1078 SPRABQ3. 2010. Available online: https://ww1.microchip.com/downloads/en/appnotes/01078b.pdf (accessed on 26 October 2021).
- NXP. Sensorless PMSM Vector Control with a Sliding Mode Observer for Compressors Using MC56F8013, DRM099, Rev. 0. Available online: https://www.nxp.com/docs/en/reference-manual/DRM099.pdf (accessed on 26 October 2021).
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Baratieri, C.L.; Pinheiro, H. New variable gain super-twisting sliding mode observer for sensorless vector control of nonsinusoidal back-EMF PMSM. Control Eng. Pract. 2016, 52, 59–69. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive Second-Order Sliding-Mode Observer for PMSM Sensorless Control Considering VSI Nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Sreejith, R.; Singh, B. Sensorless Predictive Control of SPMSM-Driven Light EV Drive Using Modified Speed Adaptive Super Twisting Sliding Mode Observer with MAF-PLL. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 42–52. [Google Scholar] [CrossRef]
- Slotine, J.J.E. Sliding controller design for non-linear systems. Int. J. Control 1984, 40, 421–434. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Gao, J.; Wang, Y.; Yan, L. An Improved Delay-Suppressed Sliding-Mode Observer for Sensorless Vector-Controlled PMSM. IEEE Trans. Ind. Electron. 2020, 67, 5913–5923. [Google Scholar] [CrossRef]
- Ye, S.; Yao, X. An Enhanced SMO-Based Permanent-Magnet Synchronous Machine Sensorless Drive Scheme with Current Measurement Error Compensation. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4407–4419. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, J.; Tan, K.; Huang, B.; He, W. Sliding Mode Observer with Adaptive Parameter Estimation for Sensorless Control of IPMSM. Energies 2020, 13, 5991. [Google Scholar] [CrossRef]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive Compensation Method for High-Speed Surface PMSM Sensorless Drives of EMF-Based Position Estimation Error. IEEE Trans. Power Electron. 2016, 31, 1438–1449. [Google Scholar] [CrossRef]
- An, Q.; Zhang, J.; An, Q.; Liu, X.; Shamekov, A.; Bi, K. Frequency-Adaptive Complex-Coefficient Filter-Based Enhanced Sliding Mode Observer for Sensorless Control of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2020, 56, 335–343. [Google Scholar] [CrossRef]
- Ye, S.; Yao, X. A Modified Flux Sliding-Mode Observer for the Sensorless Control of PMSMs with Online Stator Resistance and Inductance Estimation. IEEE Trans. Power Electron. 2020, 35, 8652–8662. [Google Scholar] [CrossRef]
- Chi, S.; Zhang, Z.; Xu, L. Sliding-Mode Sensorless Control of Direct-Drive PM Synchronous Motors for Washing Machine Applications. IEEE Trans. Ind. Appl. 2009, 45, 582–590. [Google Scholar] [CrossRef]
- Bao, D.; Wu, H.; Wang, R.; Zhao, F.; Pan, X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies 2020, 13, 6511. [Google Scholar] [CrossRef]
- Lu, W.; Zheng, D.; Lu, Y.; Lu, K.; Guo, L.; Yan, W.; Luo, J. New Sensorless Vector Control System with High Load Capacity Based on Improved SMO and Improved FOO. IEEE Access 2021, 9, 40716–40727. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, G.; Hang, M.; Cheng, S.; Li, P. Sensorless Control Strategy of a Permanent Magnet Synchronous Motor Based on an Improved Sliding Mode Observer. World Electr. Veh. J. 2021, 12, 74. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, H.; Song, X. Position-Estimation Deviation-Suppression Technology of PMSM Combining Phase Self-Compensation SMO and Feed-Forward PLL. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 335–344. [Google Scholar] [CrossRef]
- Kim, H.; Son, J.; Lee, J. A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM. IEEE Trans. Ind. Electron. 2011, 58, 4069–4077. [Google Scholar] [CrossRef]
- Ren, N.; Fan, L.; Zhang, Z. Sensorless PMSM Control with Sliding Mode Observer Based on Sigmoid Function. J. Electr. Eng. Technol. 2021, 16, 933–939. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, X.; Gerada, C.; Zhang, H.; Liu, C.; Wang, Y. Multi-Physics and Multi-Objective Optimization of a High Speed PMSM for High Performance Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Guo, Y.; Zhu, J. Multiobjective System Level Optimization Method for Switched Reluctance Motor Drive Systems Using Finite-Element Model. IEEE Trans. Ind. Electron. 2020, 67, 10055–10064. [Google Scholar] [CrossRef]
- Lei, G.; Jianguo, Z.; Youguang, G. Multidisciplinary Design Optimization Methods for Electrical Machines and Drive Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T.; Erwinski, K.; Grzesiak, L.M. Comparison of Constraint-handling Techniques Used in Artificial Bee Colony Algorithm for Auto-Tuning of State Feedback Speed Controller for PMSM. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics, ICINCO, INSTICC, Porto, Portugal, 29–31 July 2018; SciTePress: Setúbal, Portugal, 2018; Volume 1, pp. 269–276. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T.; Grzesiak, L.M. Application of optimization algorithms to adaptive motion control for repetitive process. ISA Trans. 2021, 115, 192–205. [Google Scholar] [CrossRef]
- Petro, V.; Kyslan, K. A Comparative Study of Different SMO Switching Functions for Sensorless PMSM Control. In Proceedings of the International Conference on Electrical Drives and Power Electronics (EDPE), Dubrovnik, Croatia, 22–24 September 2021; pp. 102–107. [Google Scholar] [CrossRef]
- Petro, V.; Kyslan, K. Design and Simulation of Direct and Indirect Back EMF Sliding Mode Observer for Sensorless Control of PMSM. Power Electron. Drives 2020, 5, 215–228. [Google Scholar] [CrossRef]
- Ye, S. Design and performance analysis of an iterative flux sliding-mode observer for the sensorless control of PMSM drives. ISA Trans. 2019, 94, 255–264. [Google Scholar] [CrossRef]
- Masoumi Kazraji, S.; Soflayi, R.; Bannae Sharifian, M.B. Sliding-Mode Observer for Speed and Position Sensorless Control of Linear-PMSM. Electr. Control Commun. Eng. 2014, 5, 20–26. [Google Scholar] [CrossRef] [Green Version]
- Jahan, A.; Edwards, K.L.; Bahraminasab, M. 4-Multi-criteria decision-making for materials selection. In Multi-Criteria Decision Analysis for Supporting the Selection of Engineering Materials in Product Design, 2nd ed.; Jahan, A., Edwards, K.L., Bahraminasab, M., Eds.; Butterworth-Heinemann: Oxford, UK, 2016; pp. 63–80. [Google Scholar] [CrossRef]
- Ghane-Kanafi, A.; Khorram, E. A new scalarization method for finding the efficient frontier in non-convex multi-objective problems. Appl. Math. Model. 2015, 39, 7483–7498. [Google Scholar] [CrossRef]
- Grubbs, F.E. Procedures for Detecting Outlying Observations in Samples. Technometrics 1969, 11, 1–21. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Type | TGN3-0115-30-48/T1 |
|---|---|
| dc link voltage | V |
| rated torque | Nm |
| rated current | A |
| torque constant | Nm/A |
| voltage constant | V/1000 rpm |
| no. of pole pairs | |
| rated speed | rpm |
| stator resistance | |
| stator inductance | mH |
| PI speed controller | |
| PI current controller | |
| PLL | |
| = 490,000 | |
| max. current | A |
| cut-off frequency of the LPF | = 7.7 kHz |
| feedback gain | = 100 |
| Switching Function | SC | RMSE (rad/s) | RMSE (rad) |
|---|---|---|---|
| hyperbolic | m = 0.002 | 0.735 | 0.323 |
| hyperbolic | m = 0.004 | 0.799 | 0.167 |
| hyperbolic | m = 0.008 | 0.865 | 0.066 |
| hyperbolic | m = 0.012 | 0.890 | 0.058 |
| hyperbolic | m = 0.016 | 0.893 | 0.079 |
| hyperbolic | m = 0.02 | 0.901 | 0.070 |
| hyperbolic | m = 0.024 | 0.906 | 0.094 |
| hyperbolic | m = 0.028 | 0.904 | 0.100 |
| hyperbolic | m = 0.032 | 0.900 | 0.106 |
| hyperbolic | m = 0.04 | 0.899 | 0.094 |
| saturation | = 20 | 0.913 | 0.128 |
| saturation | = 25 | 0.922 | 0.110 |
| saturation | = 30 | 0.927 | 0.094 |
| saturation | = 35 | 0.916 | 0.096 |
| saturation | = 40 | 0.915 | 0.095 |
| saturation | = 45 | 0.911 | 0.110 |
| sigmoid | = 0.003 | 0.705 | 0.416 |
| sigmoid | = 0.03 | 0.885 | 0.061 |
| sigmoid | = 0.04 | 0.898 | 0.077 |
| sigmoid | = 0.05 | 0.903 | 0.105 |
| sigmoid | = 0.06 | 0.905 | 0.081 |
| sigmoid | = 0.08 | 0.912 | 0.112 |
| signum | - | 4.275 | 0.192 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyslan, K.; Petro, V.; Bober, P.; Šlapák, V.; Ďurovský, F.; Dybkowski, M.; Hric, M. A Comparative Study and Optimization of Switching Functions for Sliding-Mode Observer in Sensorless Control of PMSM. Energies 2022, 15, 2689. https://0-doi-org.brum.beds.ac.uk/10.3390/en15072689
Kyslan K, Petro V, Bober P, Šlapák V, Ďurovský F, Dybkowski M, Hric M. A Comparative Study and Optimization of Switching Functions for Sliding-Mode Observer in Sensorless Control of PMSM. Energies. 2022; 15(7):2689. https://0-doi-org.brum.beds.ac.uk/10.3390/en15072689
Chicago/Turabian StyleKyslan, Karol, Viktor Petro, Peter Bober, Viktor Šlapák, František Ďurovský, Mateusz Dybkowski, and Matúš Hric. 2022. "A Comparative Study and Optimization of Switching Functions for Sliding-Mode Observer in Sensorless Control of PMSM" Energies 15, no. 7: 2689. https://0-doi-org.brum.beds.ac.uk/10.3390/en15072689