
Development of a Model-Based Coordinated Air-Fuel Controller for a 3.0 dm3 Diesel Engine and Its Assessment through Model-in-the-Loop


Abstract
:1. Introduction
2. Bibliography Review
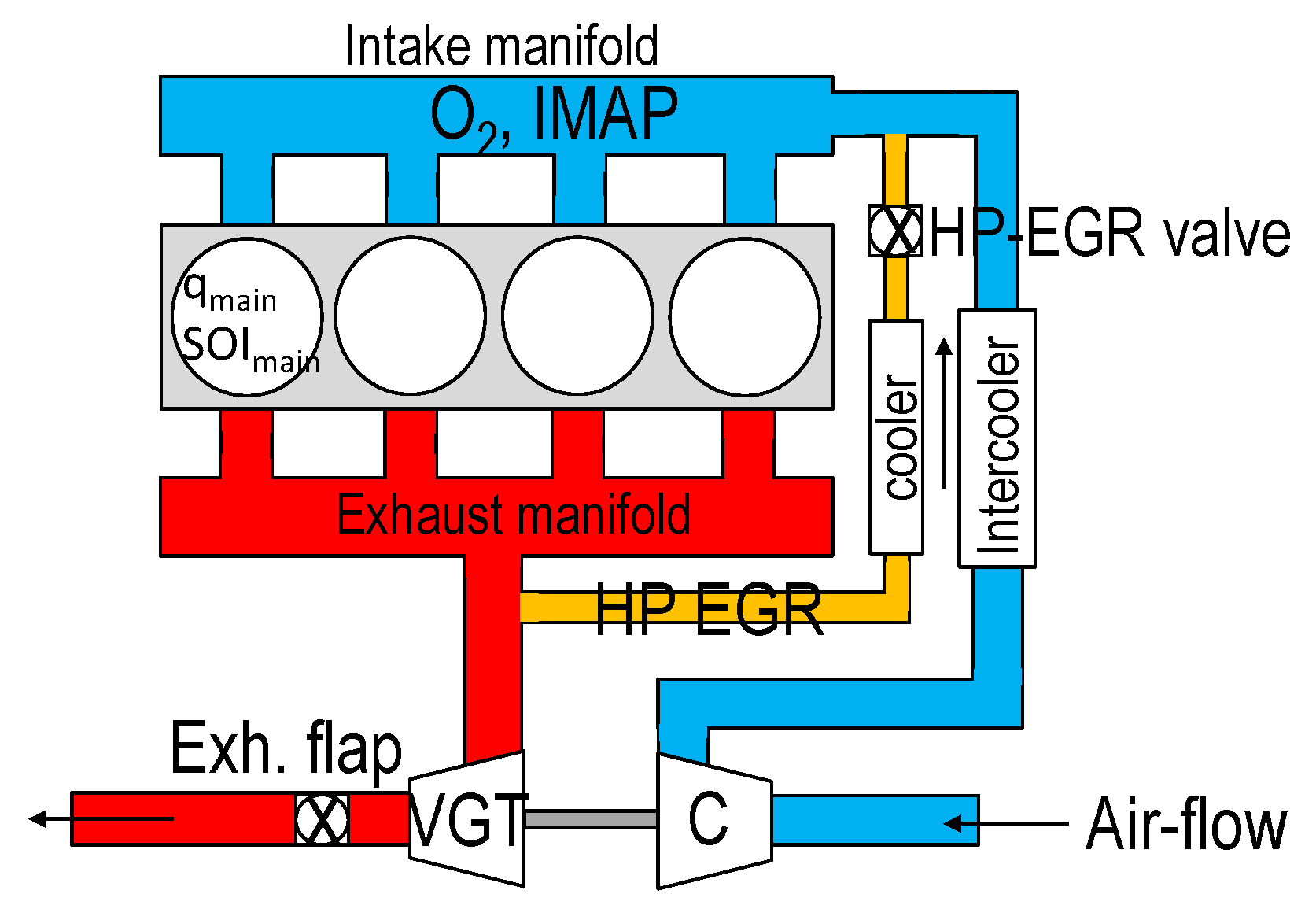
3. Overall Control Structure
3.1. Air Path Control System
3.2. Combustion Control System
3.3. Coordination Structure
4. Coordinator Design
4.1. Network Training
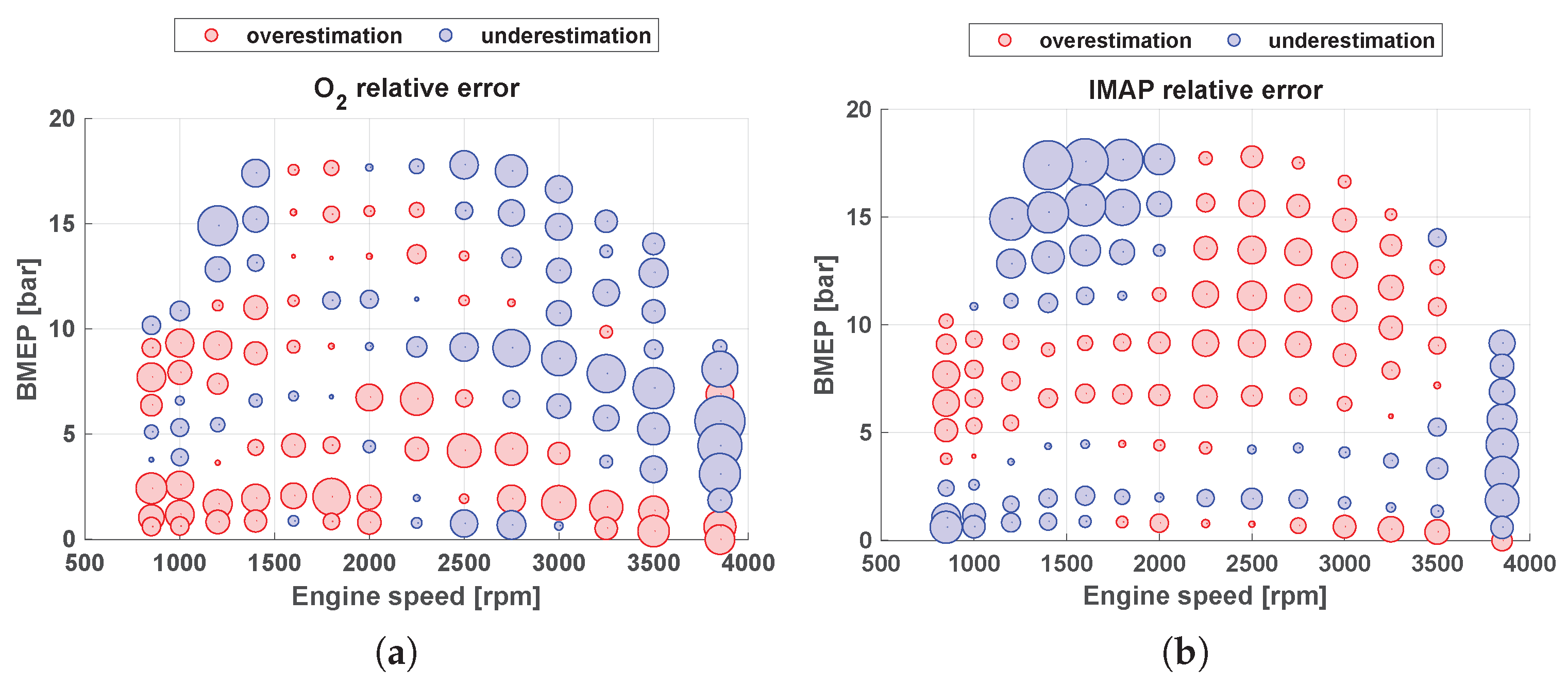
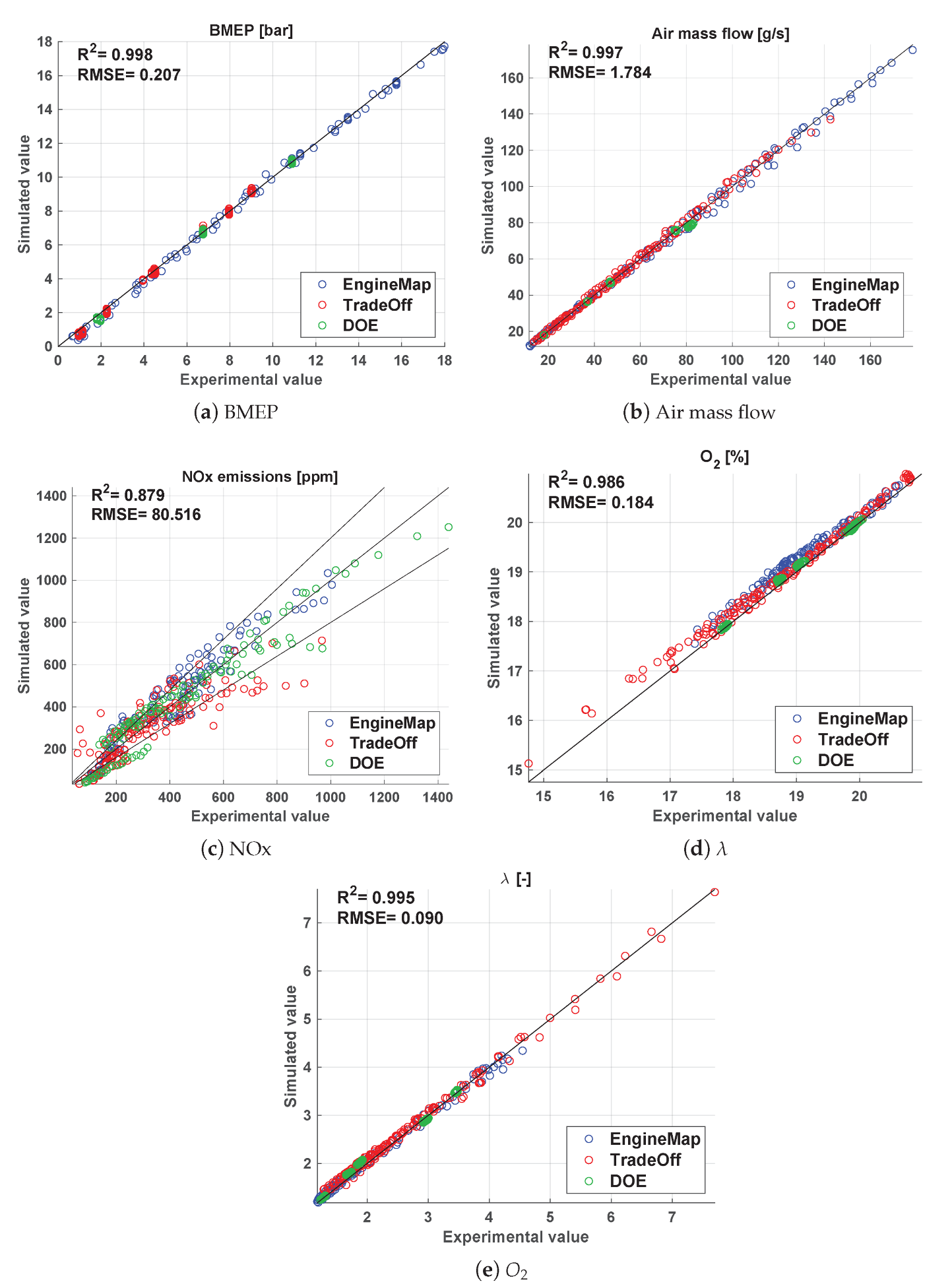
4.2. Steady State Validation
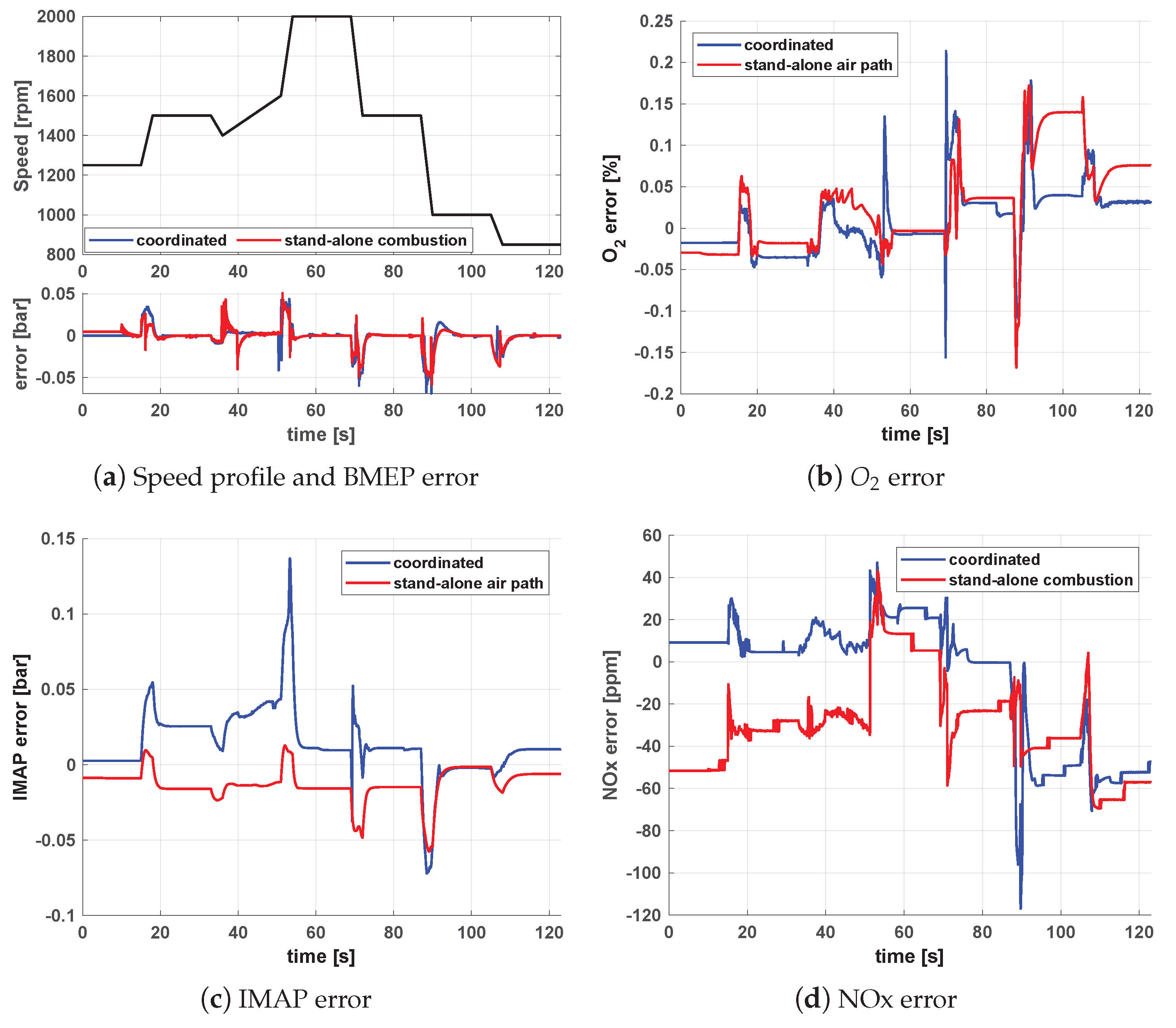
4.3. Transient Validation
- 1.
- Slow varying load hat ramps at different speeds, used to verify the steady state results.
- 2.
- Hat ramps where speed and load vary together over the whole engine map.
- 3.
- A World Harmonized Transient Cycle (WHTC) test.
5. Coordination Results
5.1. Comparison with the Uncoordinated Control Systems
5.2. Coordinated Controllers
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Relative air-to-fuel ratio | |
| ARX | AutoRegressive model with eXogenous input |
| BMEP | Brake Mean Effective Pressure |
| Carbon Dioxide | |
| DOE | Design Of Experiment |
| ECU | Electronic Control Unit |
| EGR | Exhaust Gas Recirculation |
| HP | High-Pressure |
| ICE | Internal Combustion Engine |
| HRR | Heat Release Rate |
| IMAP | Intake MAnifold Pressure |
| IMEP | Indicated Mean Effective Pressure |
| MAF | Air Mass Flow rate |
| MFB50 | 50% of Burned Mass Fraction |
| MiL | Model-in-the-Loop |
| MIMO | Multiple Input Multiple Output |
| MISO | Multiple Input Single Output |
| MPC | Model Predictive Control |
| NARX | Nonlinear AutoRegressive model with eXogenous input |
| NLQR | NonLinear Quadratic Regulator |
| NOx | Oxides of Nitrogen |
| Oxygen | |
| PID | Proportional–Integral–Derivative controller |
| PM | Particulate Matter |
| q | Fuel injection quantity |
| SiL | Software-in-the-Loop |
| SOI | Start Of Injection |
| SS | Steady State |
| VGT | Variable Geometry Turbocharger |
| WHTC | World Harmonized Transient Cycle |
| subscript main | Main injection pulse |
Appendix A


References
- EIA. International Energy Outlook 2019; United States Energy Information Administration: Washington, DC, USA, 2019. [Google Scholar]
- Kalghatgi, G. Is it really the end of internal combustion engines and petroleum in transport? Appl. Energy 2018, 225, 965–974. [Google Scholar] [CrossRef]
- Ritchie, H.; Roser, M.; Rosado, P. CO2 and Greenhouse Gas Emissions. Our World in Data. 2020. Available online: https://ourworldindata.org/co2-and-other-greenhouse-gas-emissions (accessed on 9 January 2023).
- Baratta, M.; Finesso, R.; Misul, D.; Spessa, E. Comparison between Internal and External EGR Performance on a Heavy Duty Diesel Engine by Means of a Refined 1D Fluid-Dynamic Engine Model. SAE Int. J. Engines 2015, 8, 1977–1992. [Google Scholar] [CrossRef]
- Ferrari, A.; Jin, Z.; Vento, O.; Zhang, T. An injected quantity estimation technique based on time–frequency analysis. Control Eng. Pract. 2021, 116, 104910. [Google Scholar] [CrossRef]
- d’Ambrosio, S.; Ferrari, A.; Mancarella, A.; Mancò, S.; Mittica, A. Comparison of the Emissions, Noise, and Fuel Consumption Comparison of Direct and Indirect Piezoelectric and Solenoid Injectors in a Low-Compression-Ratio Diesel Engine. Energies 2019, 12, 4023. [Google Scholar] [CrossRef] [Green Version]
- Cococcetta, F.; Finesso, R.; Hardy, G.; Marello, O.; Spessa, E. Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine. Energies 2019, 12, 4704. [Google Scholar] [CrossRef] [Green Version]
- Finesso, R.; Marello, O.; Spessa, E.; Yang, Y.; Hardy, G. Model-Based Control of BMEP and NOx Emissions in a Euro VI 3.0L Diesel Engine. SAE Int. J. Engines 2017, 10, 2288–2304. [Google Scholar] [CrossRef]
- d’Ambrosio, S.; Gaia, F.; Iemmolo, D.; Mancarella, A.; Salamone, N.; Vitolo, R.; Hardy, G. Performance and Emission Comparison between a Conventional Euro VI Diesel Engine and an Optimized PCCI Version and Effect of EGR Cooler Fouling on PCCI Combustion. In Proceedings of the WCX World Congress Experience, Detroit, MI, USA, 10–12 April 2018; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- d’Ambrosio, S.; Mancarella, A.; Manelli, A. Utilization of Hydrotreated Vegetable Oil (HVO) in a Euro 6 Dual-Loop EGR Diesel Engine: Behavior as a Drop-In Fuel and Potentialities along Calibration Parameter Sweeps. Energies 2022, 15, 7202. [Google Scholar] [CrossRef]
- Bunce, M.; Blaxill, H. Sub-200 g/kWh BSFC on a Light Duty Gasoline Engine. In Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 12–14 April 2016; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Kargul, J.; Stuhldreher, M.; Barba, D.; Schenk, C.; Bohac, S.; McDonald, J.; Dekraker, P.; Alden, J. Benchmarking a 2018 Toyota Camry 2.5-Liter Atkinson Cycle Engine with Cooled-EGR. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 601–638. [Google Scholar] [CrossRef] [PubMed]
- Bejan, A. Thermodynamics today. Energy 2018, 160, 1208–1219. [Google Scholar] [CrossRef]
- Ventura, L. Development and Assessment of Model-Based and Sensor-Based Algorithms for Combustion and Emission Control in Diesel Engines. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2022. [Google Scholar]
- Xie, H.; Song, K.; Yang, S.; Tatsumi, J.; Zheng, Q.; Zhang, H.; Gao, Z. On Decoupling Control of the VGT-EGR System in Diesel Engines: A New Framework. IEEE Trans. Control Syst. Technol. 2016, 24, 1788–1796. [Google Scholar] [CrossRef]
- Isermann, R. Engine Modeling and Control: Modeling and Electronic Management of Internal Combustion Engines; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Malan, S.A.; Ventura, L. Air-Path Control for a Prototype PCCI Diesel Engine. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 843–848. [Google Scholar] [CrossRef]
- Ventura, L.; Finesso, R.; Malan, S.A.; d’Ambrosio, S.; Manelli, A. Model-based design of closed loop controllers of the air-path in a heavy duty diesel engine. AIP Conf. Proc. 2019, 2191, 020152. [Google Scholar] [CrossRef]
- Das, H.B.; Dhinagar, S.J. Airpath Modelling and Control for a Turbocharged Diesel Engine. In Proceedings of the SAE 2008 World Congress & Exhibition, Detroit, MI, USA, 14–17 April 2008; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Alfieri, E.; Amstutz, A.; Guzzella, L. Gain-scheduled model-based feedback control of the air/fuel ratio in diesel engines. Control Eng. Pract. 2009, 17, 1417–1425. [Google Scholar] [CrossRef]
- Deng, C.; Colin, G.; Chamaillard, Y.; Gruel, D.N. Sequential robust control design methodology application to the MIMO air path of a diesel engine. In Proceedings of the IECON 2012–38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 2138–2143. [Google Scholar] [CrossRef]
- Liu, L.; Wei, X.; Liu, X. Low order H∞ controller design for the air path system of diesel engines. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xian, China, 25–27 May 2009; pp. 3470–3475. [Google Scholar] [CrossRef]
- Ahmed, F.S.; Laghrouche, S.; Bagdouri, M.E. Second-order sliding mode based output-feedback control of an engine air path actuator in presence of uncertainties. In Proceedings of the 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 50–56. [Google Scholar] [CrossRef]
- Irdmousa, B.K.; Rizvi, S.Z.; Veini, J.M.; Nabert, J.D.; Shahbakhti, M. Data-driven Modeling and Predictive Control of Combustion Phasing for RCCI Engines. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 1617–1622. [Google Scholar] [CrossRef]
- Norouzi, A.; Heidarifar, H.; Shahbakhti, M.; Koch, C.R.; Borhan, H. Model Predictive Control of Internal Combustion Engines: A Review and Future Directions. Energies 2021, 14, 6251. [Google Scholar] [CrossRef]
- Mittelmann, H. Decision Tree for Optimization Software. 2021. Available online: http://plato.asu.edu/guide.html (accessed on 9 January 2023).
- Yin, L.; Turesson, G.; Tunestål, P.; Johansson, R. Model Predictive Control of an Advanced Multiple Cylinder Engine With Partially Premixed Combustion Concept. IEEE/ASME Trans. Mechatron. 2020, 25, 804–814. [Google Scholar] [CrossRef]
- Abidi, I.; Bosche, J.; El Hajjaji, A.; Aitouche, A. Control of a turbocharged diesel engine with EGR system using Takagi-Sugeno’s approach. In Proceedings of the 2012 20th Mediterranean Conference on Control Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 960–965. [Google Scholar] [CrossRef]
- Kim, S.; Jin, H.; Choi, S. Pressure and flow based control of a turbocharged diesel engine air-path system equipped with dual-loop EGR and VGT. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1493–1498. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User; Pearson Education: London, UK, 1998. [Google Scholar]
- Malan, S.; Ventura, L. A Systematic Procedure for Engine Air-Path Identification. Int. J. Mech. Control 2020, 21, 127–138. [Google Scholar]
- Ortner, P.; del Re, L. Predictive Control of a Diesel Engine Air Path. IEEE Trans. Control Syst. Technol. 2007, 15, 449–456. [Google Scholar] [CrossRef]
- Willems, F.; Doosje, E.; Engels, F.; Seykens, X. Cylinder Pressure-Based Control in Heavy-Duty EGR Diesel Engines Using a Virtual Heat Release and Emission Sensor. In Proceedings of the SAE 2010 World Congress & Exhibition, Detroit, MI, USA, 12–15 April 2010; SAE International: Warrendale, PA, USA, 2010. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Wang, J. Air- and fuel-path coordinated control for advanced combustion mode transitions in Diesel engines. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 2890–2895. [Google Scholar] [CrossRef]
- Yoon, M.; Lee, K.; Sunwoo, M. A method for combustion phasing control using cylinder pressure measurement in a CRDI diesel engine. Mechatronics 2007, 17, 469–479. [Google Scholar] [CrossRef]
- Landsmann, G.; Beasley, M.; Cornwell, R.; Fussey, P.; King, R.; Noble, A.; Salamon, T.; Truscott, A. Reducing Diesel Emissions Dispersion by Coordinated Combustion Feedback Control. In Proceedings of the SAE 2006 World Congress & Exhibition, Detroit, MI, USA, 3–6 April 2006; SAE International: Warrendale, PA, USA, 2006. [Google Scholar] [CrossRef]
- Carlucci, A.; Laforgia, D.; Motz, S.; Saracino, R.; Wenzel, S. Advanced closed loop combustion control of a LTC diesel engine based on in-cylinder pressure signals. Energy Convers. Manag. 2014, 77, 193–207. [Google Scholar] [CrossRef]
- Luo, X.; Wang, S.; de Jager, B.; Willems, F. Cylinder Pressure-based Combustion Control with Multi-pulse Fuel Injection. IFAC-PapersOnLine 2015, 48, 181–186. [Google Scholar] [CrossRef]
- Albin, T.; Ritter, D.; Zweigel, R.; Abel, D. Hybrid multi-objective MPC for fuel-efficient PCCI engine control. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 2583–2588. [Google Scholar] [CrossRef]
- Shin, B.; Chi, Y.; Kim, M.; Dickinson, P.; Pekar, J.; Ko, M. Model Predictive Control of an Air Path System for Multi-Mode Operation in a Diesel Engine. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 5–7 April 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Ventura, L.; Malan, S. Intake O2 Concentration Estimation in a Turbocharged Diesel Engine through NOE. In Proceedings of the Conference on Sustainable Mobility, Catania, Italy, 4–7 October 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- d’Ambrosio, S.; Finesso, R.; Hardy, G.; Manelli, A.; Mancarella, A.; Marello, O.; Mittica, A. Model-Based Control of Torque and Nitrogen Oxide Emissions in a Euro VI 3.0 L Diesel Engine through Rapid Prototyping. Energies 2021, 14, 1107. [Google Scholar] [CrossRef]
- Ventura, L.; Malan, S.A. NLQR Control of High Pressure EGR in Diesel Engine. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 721–726. [Google Scholar] [CrossRef]
- Eriksson, L.; Nielsen, L. Modeling and Control of Engines and Drivelines; Automotive Series; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Malan, S.A.; Ventura, L.; Manelli, A. Cycle to cycle closed-loop combustion control through virtual sensor in a diesel engine. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 1179–1184. [Google Scholar] [CrossRef]
- Ventura, L.; Malan, S.A. Air path and combustion controls coordination in diesel engine. In Proceedings of the 2022 22nd International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 27 November–1 December 2022; pp. 354–359. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine type | Heavy-duty Euro VI diesel engine |
| Number of cylinders | 4 |
| Displacement | 2998 cm |
| Bore × stroke | 95.8 × 104 mm |
| Rod length | 160 mm |
| Compression ratio | 17.5:1 |
| Valves per cylinder | 4 |
| Turbocharger | VGT type |
| Fuel injection system | High Pressure Common Rail |
| Control | SAC | CoC | SAC | CoC | SAC | CoC | SAC | CoC |
|---|---|---|---|---|---|---|---|---|
| Ramp Figure 8 | BMEP | IMAP | NOx | |||||
| RMSE | 0.38 | 0.033 | 0.725 | 0.237 | 0.037 | 0.048 | 83.54 | 82.58 |
| BMEP > 5 bar | 0.128 | 0.036 | 0.195 | 0.239 | 0.035 | 0.066 | 71.22 | 40.85 |
| BMEP < 5 bar | 0.506 | 0.03 | 0.973 | 0.236 | 0.04 | 0.024 | 95.8 | 106.22 |
| Ramp Figure 9 | BMEP | IMAP | NOx | |||||
| RMSE | 0.132 | 0.011 | 0.11 | 0.06 | 0.022 | 0.077 | 101.33 | 31.27 |
| sim 1 | sim 2 | |||||
|---|---|---|---|---|---|---|
| Load ramp at 850 rpm | target | 5.97 | diff. perc. 5.05% | target | 6.16 | diff. perc. 1.1% |
| sim | 6.27 | sim | 6.23 | |||
| Load ramp at 3000 rpm | target | 5.25 | diff. perc. 7.83% | target | 6.32 | diff. perc. 2.74% |
| sim | 5.66 | sim | 6.5 | |||
| WHTC | target | 52.5 | diff. perc. 5.8% | target | 53.84 | diff. perc. 4.75% |
| sim | 55.5 | sim | 55.71 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ventura, L.; Finesso, R.; Malan, S.A. Development of a Model-Based Coordinated Air-Fuel Controller for a 3.0 dm3 Diesel Engine and Its Assessment through Model-in-the-Loop. Energies 2023, 16, 907. https://0-doi-org.brum.beds.ac.uk/10.3390/en16020907
Ventura L, Finesso R, Malan SA. Development of a Model-Based Coordinated Air-Fuel Controller for a 3.0 dm3 Diesel Engine and Its Assessment through Model-in-the-Loop. Energies. 2023; 16(2):907. https://0-doi-org.brum.beds.ac.uk/10.3390/en16020907
Chicago/Turabian StyleVentura, Loris, Roberto Finesso, and Stefano A. Malan. 2023. "Development of a Model-Based Coordinated Air-Fuel Controller for a 3.0 dm3 Diesel Engine and Its Assessment through Model-in-the-Loop" Energies 16, no. 2: 907. https://0-doi-org.brum.beds.ac.uk/10.3390/en16020907